

نقشه برداری آسیب ساختاری مبتنی بر پهپاد: یک بررسی
خلاصه
کلید واژه ها:
پهپاد ; بینایی کامپیوتری ؛ ابرهای نقطه ای ; یادگیری ماشینی ؛ سی ان ان ; GAN ; اولین پاسخ دهنده ؛ RECONASS ; ایناچوس
1. معرفی
1.1. نقشه برداری آسیب های سازه ای با سنجش از دور
1.2. محدوده بررسی
2. نقشه برداری آسیب مبتنی بر پهپاد
2.1. شناسایی صحنه و تصویربرداری ساده
2.2. روشهای مبتنی بر بافت و تقسیمبندی
2.3. طبقه بندی کننده های معمولی
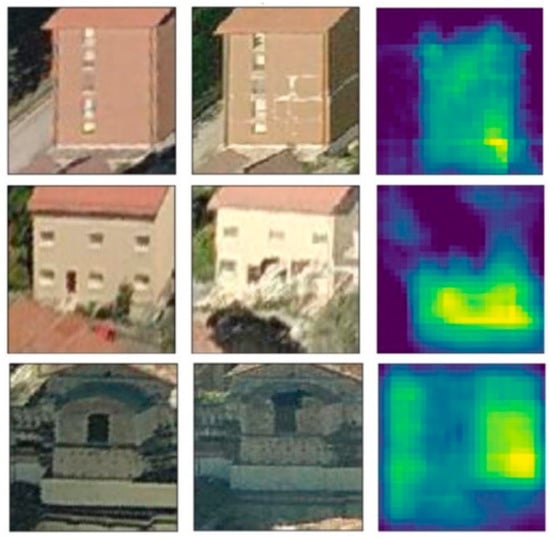
کار فرناندز گالارتا و همکاران. اهمیت اطلاعات هندسی را در تشخیص آسیب، به ویژه بازشوها در سقف ها و نماها نشان داد. وتریول و همکاران [ 41 ] کار را با توسعه روشی برای جداسازی ساختمانهای منفرد از یک ابر نقطهای مشتق شده از تصویر دقیق که محلهای از Mirabello (ایتالیا) شامل نزدیک به 100 ساختمان را پوشش میدهد، پیش برد. سپس هر یک از آنها تحت جستجوی دهانههای منتسب به آسیبهای لرزهای، مانند فروریختن جزئی سقف یا سوراخهای نما قرار گرفتند، تمرکزی مشابه [ 42 ].]. شکاف ها بر اساس موجک های گابور و همچنین هیستوگرام ویژگی های جهت گیری گرادیان (HoG) شناسایی شدند. دو الگوریتم اصلی یادگیری ماشین، ماشین بردار پشتیبان (SVM) و جنگل تصادفی (RF)، برای شناسایی مناطق آسیب دیده بر اساس توصیفگرهای رادیومتریک، با میزان موفقیت تقریباً 95٪ استفاده شد. با این حال، این کار همچنین نشان داد که چگونه تقسیمبندی ابرهای نقطهای اغلب توسط مصنوعات و شکافهای دادهای مانع میشود. در [ 43 ]، رویکردی برای غلبه بر این مشکل ایجاد شد: پس از نمایش بخشهای سه بعدی برگرفته از ابر نقطه اولیه در فضای تصویر، بخشبندی بعدی با استفاده از ویژگیهای هندسی و رادیومتری، بخشهای ساختمانی دقیقتر و کاملتری را بهدست آورد.

2.4. یادگیری ماشین پیشرفته و ظهور CNN
2.5. سطوح نقشه برداری خسارت بلایا
2.6. مورد ویژه نقشه برداری آسیب زیرساخت
3. آسیب به محصول و قابلیت استفاده سیستم
3.1. تشخیص آسیب در دو پروژه تحقیقاتی اروپایی
3.2. آزمایش با کاربران نهایی در دو پروژه تحقیقاتی اروپایی
3.3. اعتبار سنجی
3.4. محدودیت ها
4. چشم انداز و تحولات جدید
4.1. پیشرفت در یادگیری ماشینی
4.2. خودمختاری نقشه برداری
4.3. نقشه برداری داخلی
4.4. عصر هواپیماهای بدون سرنشین با توانایی های رباتیک
5. نتیجه گیری ها
منابع
- بیکر، اس. سانفرانسیسکو در خرابهها: عکسهای هوایی ۱۹۰۶ جورج آر. لارنس منظره 1989 ، 30 ، 9-14. [ Google Scholar ]
- Kerle, N. Disasters: ارزیابی ریسک، مدیریت و مطالعات پس از فاجعه با استفاده از سنجش از دور. در سنجش از دور منابع آب، بلایا و مطالعات شهری (راهنمای سنجش از دور، 3) ; سپسکبیل، PS، ویرایش. CRC Press: Boca Raton، FL، USA، 2015; ص 455-481. [ Google Scholar ]
- دونگ، ال جی؛ Shan, J. بررسی جامع تشخیص آسیب ساختمان ناشی از زلزله با تکنیکهای سنجش از دور. ISPRS-J. فتوگرام Remote Sens. 2013 ، 84 ، 85-99. [ Google Scholar ] [ CrossRef ]
- بلابید، ن. ژائو، اف. بروکا، ال. هوانگ، YB; Tan, YM پیشبینی سیل در زمان واقعی بر اساس محصولات بارش ماهوارهای. Remote Sens. 2019 , 11 , 252. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- نوویکوف، جی. ترکین، ا. پوتاپوف، جی. ایگناتیف، وی. Burnaev، E. تجزیه و تحلیل تصاویر ماهواره ای برای ارزیابی آسیب عملیاتی در شرایط اضطراری. در کنفرانس بین المللی سیستم های اطلاعات کسب و کار، برلین، آلمان، 2018 ; انتشارات بین المللی Springer: برلین، آلمان، 2008; صص 347-358. [ Google Scholar ]
- کرل، ن. هافمن، RR نقشه برداری آسیب مشارکتی برای پاسخ اضطراری: نقش مهندسی سیستم های شناختی. نات. سیستم خطرات زمین. علمی 2013 ، 13 ، 97-113. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- غفاریان، س. کرل، ن. Filatova، T. پروکسی های مبتنی بر سنجش از دور برای مدیریت ریسک بلایای شهری و تاب آوری: یک بررسی. Remote Sens. 2018 ، 10 ، 1760. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لو، CH; Ni، CF; چانگ، CP; ین، JY; تجزیه و تحلیل تفاوت انسجام Chuang، RY تداخلنگار نگهبان-1 sar برای شناسایی بلایای ناشی از زلزله در مناطق شهری. Remote Sens. 2018 , 10 , 1318. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لی، LL; لیو، XG; چن، QH; یانگ، اس. ارزیابی آسیب ساختمان از داده های پولسار با استفاده از پارامترهای بافت مدل آماری. محاسبه کنید. Geosci. 2018 ، 113 ، 115-126. [ Google Scholar ] [ CrossRef ]
- گوکون، اچ. پست، ج. استاین، ای. مارتینیس، اس. توله، ا. ماک، م. گیس، سی. کوشیمورا، اس. Matsuoka, M. روشی برای تشخیص ساختمانهای ویرانشده توسط زلزله و سونامی توهوکو در سال ۲۰۱۱ با استفاده از دادههای چندزمانی terrasar-x. IEEE Geosci. سنسور از راه دور Lett. 2015 ، 12 ، 1277-1281. [ Google Scholar ] [ CrossRef ]
- بای، YB; گائو، سی. سینگ، اس. کخ، م. آدریانو، بی. ماس، ای. کوشیمورا، S. چارچوبی از تشخیص سریع آسیب سونامی منطقه ای از تصاویر terrasar-x پس از رویداد با استفاده از شبکه های عصبی عمیق. IEEE Geosci. سنسور از راه دور Lett. 2018 ، 15 ، 43-47. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کونر، ای جی; شائو، ی. کمپبل، JB تشخیص آسیب شهری با استفاده از سنجش از دور و الگوریتمهای یادگیری ماشین: بازبینی زلزله هائیتی در سال 2010. Remote Sens. 2016 , 8 , 868. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- جی، م. لیو، ال. Buchroithner, M. شناسایی ساختمان های فروریخته با استفاده از تصاویر ماهواره ای پس از زلزله و شبکه های عصبی کانولوشن: مطالعه موردی زلزله هائیتی در سال 2010. Remote Sens. 2018 ، 10 ، 1689. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Xu، JZ; لو، دبلیو. لی، ز. خیتان، پ. Zaytseva, V. تشخیص آسیب ساختمان در تصاویر ماهواره ای با استفاده از شبکه های عصبی کانولوشن. arXiv 2019 ، arXiv:1910.06444. [ Google Scholar ]
- سبلایم، ج. Kalinicheva، E. نقشه برداری خودکار آسیب پس از فاجعه با استفاده از تکنیک های یادگیری عمیق برای تشخیص تغییر: مطالعه موردی سونامی توهوکو. Remote Sens. 2019 , 11 , 1123. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- جی، م. لیو، ال. دو، آر. Buchroithner, MF مطالعه مقایسه ای بافت و ویژگی های شبکه عصبی کانولوشن برای تشخیص ساختمان های فروریخته پس از زلزله با استفاده از تصاویر ماهواره ای قبل و بعد از رویداد. Remote Sens. 2019 , 11 , 1202. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گوپتا، آر. گودمن، بی. پاتل، ن. هاسفلت، آر. ساجیف، اس. هیم، ای. دوشی، ج. لوکاس، ک. چوست، اچ. گاستون، ME ایجاد xbd: مجموعه داده ای برای ارزیابی آسیب ساختمان از تصاویر ماهواره ای. در مجموعه مقالات کارگاه های آموزشی CVPR، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 16 تا 20 ژوئن 2019. [ Google Scholar ]
- ناکانیشی، ح. Inoue, K. مطالعه بر روی ربات هوانوردی هوشمند برای واکنش به بلایا . Science Press پکن: پکن، چین، 2005; جلد 5، ص 1730–1734. [ Google Scholar ]
- میانو، ک. شینکوما، آر. مندایام، NB; ساتو، تی. Oki، E. برنامهریزی مبتنی بر ابزار برای سیستمهای جستوجوی چند UAV در مناطق آسیبدیده. دسترسی IEEE 2019 ، 7 ، 26810–26820. [ Google Scholar ] [ CrossRef ]
- ایجاز، دبلیو. اعظم، م. سعادت، س. اقبال، ف. Hanan، A. وسایل نقلیه هوایی بدون سرنشین پلت فرم iot را برای مدیریت بلایا فعال کردند. Energies 2019 ، 12 ، 2706. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- کرل، ن. نکس، اف. دوارته، دی. نقشهبرداری آسیب ساختاری مبتنی بر Vetrivel، A. Uav – نتایج حاصل از 6 سال تحقیق در دو پروژه اروپایی. بین المللی قوس. فتوگرام Remote Sens. Spatial Inf. علمی 2019 ، XLII-3/W8 ، 187–194. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وانگ، SH; کیم، دی اچ. کانگ، ام اس؛ چو، ک. پارک، اس. پسر، WH توسعه یک سیستم ربات پرنده برای بازرسی بصری پل ها . زیرساخت هوشمند نظارت بر سلامت ساختاری Ishmii-Int Soc: Winnipeg، MB، کانادا، 2007. [ Google Scholar ]
- پولفیس، ام. ون گول، ال. ورگاوون، ام. Verbiest، F. کورنلیس، ک. تاپس، ج. Koch, R. مدلسازی بصری با دوربین دستی. بین المللی جی. کامپیوتر. چشم انداز 2004 ، 59 ، 207-232. [ Google Scholar ] [ CrossRef ]
- سوزوکی، تی. میوشی، دی. مگورو، جی. آمانو، ی. هاشیزومه، تی. ساتو، ک. تاکیگوچی، جی. تولید نقشه خطر در زمان واقعی با استفاده از هواپیمای کوچک بدون سرنشین. در مجموعه مقالات کنفرانس سالانه Sice، توکیو، ژاپن، 20-22 اوت 2018؛ IEEE: نیویورک، نیویورک، ایالات متحده آمریکا، 2008; جلد 1-7، ص. 4. [ Google Scholar ]
- Bendea، H.; بوکاردو، پی. دکوال، اس. جولیو تونلو، FM؛ مارنچینو، دی. Piras, M. UAV کم هزینه برای ارزیابی پس از فاجعه. در بیست و یکمین کنگره ISPRS، پکن، چین ؛ ISPRS: پکن، چین، 2008; صص 1373–1380. [ Google Scholar ]
- لوئیس، جی. ارزیابی استفاده از یک پلت فرم هواپیمای بدون سرنشین کم هزینه در به دست آوردن تصاویر دیجیتال برای واکنش اضطراری. در راه حل های ژئوماتیک برای مدیریت بلایا ; Li, J., Zlatanova, S., Fabbri, AG, Eds. Springer: برلین/هایدلبرگ، آلمان، 2007; صص 117-133. [ Google Scholar ]
- مورفی، RR; استیمل، ای. گریفین، سی. کولینز، سی. هال، م. پرات، ک. استفاده تعاونی از سطح دریا بدون سرنشین و وسایل نقلیه هوایی میکرو در طوفان ویلما. ربات صحرایی جی. 2008 ، 25 ، 164-180. [ Google Scholar ] [ CrossRef ]
- کوچرزبرگر، ک. کروگر، ک. Krawiec، B. بروور، ای. وبر، تی. سنجش از دور پس از فاجعه و نمونه برداری از طریق یک هلیکوپتر خودمختار. ربات صحرایی جی. 2014 ، 31 ، 510-521. [ Google Scholar ] [ CrossRef ]
- آدامز، اس ام. لویتان، ام ال. مجموعه تصاویر فریدلند، CJ با وضوح بالا برای مطالعات پس از فاجعه با استفاده از سیستمهای هواپیمای بدون سرنشین (UAS). فتوگرام مهندس Remote Sens. 2014 , 80 , 1161–1168. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دومینیسی، دی. بایوچی، وی. زاوینو، ا. آلیکاندرو، م. Elaiopoulos، M. Micro uav برای بررسی خطرات پس از زلزله در مرکز شهر قدیمی l’aquila. در هفته کاری FIG ; شکل: رم، ایتالیا، 2012; پ. 15. [ Google Scholar ]
- ماورولیس، س. آندریاداکیس، ای. اسپیرو، NI; آنتونیو، وی. اسکورتسوس، ای. پاپادیمیتریو، پ. کاساراس، آی. کویریس، جی. Tselentis، GA; ولگاریس، ن. و همکاران ارزیابی آسیب ساختمان ناشی از زلزله سریع مبتنی بر UA و GIS برای ترسیم نقشه ایزو لرزه ems-98: زلزله 12 ژوئن 2017 mw 6.3 lesvos (شمال شرقی دریای اژه، یونان). بین المللی J. کاهش خطر بلایا. 2019 ، 37 ، 20. [ Google Scholar ] [ CrossRef ]
- دومینیسی، دی. آلیکاندرو، م. Massimi، V. Uav فتوگرامتری در سناریوی پس از زلزله: مطالعات موردی در l’aquila. Geomat. نات. خطر خطرات 2017 ، 8 ، 87-103. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هاین، دی. کرافت، تی. براوکل، جی. Berger, R. نقشه برداری بلادرنگ مبتنی بر uav برای برنامه های امنیتی یکپارچه. ISPRS Int. Geo-Inf. 2019 ، 8 ، 219. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- خو، ZQ; یانگ، جی اس. پنگ، سی. وو، ی. جیانگ، XD; لی، آر. ژنگ، ی. گائو، ی. لیو، اس. Tian، BF توسعه UAS برای بررسی بلایای پس از زلزله و کاربرد آن در زلزله ms7.0 لوشان، سیچوان، چین. محاسبه کنید. Geosci. 2014 ، 68 ، 22-30. [ Google Scholar ] [ CrossRef ]
- گووروارام، س. تیان، پی.زی. فلانگان، اچ. گویر، جی. سنجش از دور چند طیفی مبتنی بر Chao، HY Uas و محاسبه ndvi برای ارزیابی پس از فاجعه. در مجموعه مقالات کنفرانس بین المللی 2018 در مورد سیستم های هواپیمای بدون سرنشین، دالاس، TX، ایالات متحده، 12-15 ژوئن 2018؛ IEEE: نیویورک، نیویورک، ایالات متحده آمریکا، 2018؛ صص 684-691. [ Google Scholar ]
- فرناندز گالارتا، جی. کرل، ن. ارزیابی آسیب ساختاری شهری مبتنی بر Gerke، M. Uav با استفاده از تحلیل تصویر مبتنی بر شی و استدلال معنایی. نات. سیستم خطرات زمین. علمی 2015 ، 15 ، 1087-1101. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Grenzdorffer، GJ; گورتزکی، م. Friedlander, I. اکتساب تصویر فتوگرامتری و تجزیه و تحلیل تصویر از تصاویر مایل. فتوگرام رکورد 2008 ، 23 ، 372-386. [ Google Scholar ] [ CrossRef ]
- گرکه، ام. Kerle, N. ارزیابی آسیب لرزه ای سازه ای خودکار با پیکتومتری مورب هوابرد © imagery. فتوگرام مهندس Remote Sens. 2011 ، 77 ، 885-898. [ Google Scholar ] [ CrossRef ]
- گرکه، ام. Kerle، N. تطبیق نمودار در فضای سه بعدی برای ارزیابی آسیب لرزه ای سازه. در مجموعه مقالات کنفرانس بین المللی IEEE 2011 در کارگاه های بینایی کامپیوتری (کارگاه های آموزشی ICCV)، بارسلون، اسپانیا، 6 تا 13 نوامبر 2011. [ Google Scholar ]
- زنگ، تی. یانگ، WN; Li, XD میزان اطلاعات آسیب لرزه ای در مورد ساختمان ها بر اساس تصاویر سنجش از دور در ارتفاع پایین از مناطق زلزله زده میانزو. Appl. مکانیک. ماتر 2012 ، 105-107 ، 1889-1893. [ Google Scholar ] [ CrossRef ]
- وتریول، ا. گرکه، ام. کرل، ن. Vosselman, G. شناسایی آسیب در ساختمان ها بر اساس شکاف در ابرهای نقطه سه بعدی از تصاویر مورب هوابرد با وضوح بسیار بالا. ISPRS-J. فتوگرام Remote Sens. 2015 ، 105 ، 61-78. [ Google Scholar ] [ CrossRef ]
- لی، اس. تانگ، اچ. او هست.؛ شو، ی. مائو، تی. لی، جی. Xu, Z. تشخیص بدون نظارت سوراخهای سقف ناشی از زلزله از تصاویر UAV با استفاده از ویژگیهای رنگ و شکل مشترک. IEEE Geosci. سنسور از راه دور Lett. 2015 ، 12 ، 1823-1827. [ Google Scholar ]
- وتریول، ا. گرکه، ام. کرل، ن. ووسلمن، جی. تقسیم بندی تصاویر مبتنی بر uav که اطلاعات ابر نقطه سه بعدی را در خود جای داده است. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2015 ، II-3/W4 ، 261-268. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- درافشان، س. توماس، RJ; مگوایر، ام. تشخیص ترک خستگی با استفاده از سیستم های هوایی بدون سرنشین در بازرسی بحرانی شکستگی پل های فولادی. J. Bridge Eng. 2018 ، 23 ، 15. [ Google Scholar ] [ CrossRef ]
- چن، سی. Laefer، DF; مانگینا، ای. ذوالانواری، SMI; بازرسی پل Byrne، J. Uav از طریق بازسازی های سه بعدی ارزیابی شده. J. Bridge Eng. 2019 ، 24 ، 15. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- اکبر، م. قیدوای، یو. جهانشاهی، MR ارزیابی پایش سلامت ساختاری مبتنی بر تصویر با استفاده از پلت فرم یکپارچه هواپیمای بدون سرنشین. ساختار. کنترل. مانیتور سلامت. 2019 ، 26 ، 20. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- کاکویی، م. بالقی، ی. تلفیق دادههای ماهواره، هواپیما و پهپاد برای ارزیابی خودکار خسارت بلایا. بین المللی J. Remote Sens. 2017 , 38 , 2511–2534. [ Google Scholar ] [ CrossRef ]
- وتریول، ا. دوارته، دی. نکس، اف. گرکه، ام. کرل، ن. Vosselman، G. پتانسیل تصاویر هوایی مورب چند زمانی برای ارزیابی آسیب ساختاری. در مجموعه مقالات کنگره XXIII ISPRS، کمیسیون III، آرشیو بین المللی فتوگرامتری سنجش از دور و علوم اطلاعات فضایی، پراگ، جمهوری چک، 12 تا 19 ژوئیه 2016. هالونووا، ال.، شیندلر، ک.، لیمپوچ، ا.، پژدلا، تی.، صفر، وی.، مایر، اچ.، البرینک، SO، مالت، سی.، روتنشتاینر، اف.، بردیف، ام.، و غیره al., Eds. انجمن بین المللی فتوگرامتری و سنجش از دور: پراگ، جمهوری چک، 2016; جلد 3، صص 355–362. [ Google Scholar ]
- تو، جی اچ. سوئی، اچ جی; فنگ، WQ; Jia, Q. تشخیص آسیب نما در نوع آسیب دیده متوسط از تصاویر هوایی مورب با وضوح بالا. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2017 , 10 , 5598–5607. [ Google Scholar ] [ CrossRef ]
- لوکس، ال. بولاتوف، دی. تونسن، یو. Böge, M. ارزیابی سوپرپیکسلی آسیب ساختمان از تصاویر هوایی. در مجموعه مقالات چهاردهمین کنفرانس بین المللی مشترک بینایی کامپیوتری، تصویربرداری و نظریه و کاربردهای گرافیک کامپیوتری، VISIGRAPP 2019، پراگ، جمهوری چک، 25 تا 27 فوریه 2019؛ ص 211-220. [ Google Scholar ]
- دوارته، دی. نکس، اف. کرل، ن. Vosselman, G. به سمت تشخیص کارآمدتر آسیب های نما ناشی از زلزله با استفاده از تصاویر مورب UAV. بین المللی قوس. فتوگرام Remote Sens. Spatial Inf. علمی 2017 ، XLII-2/W6 ، 93–100. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- درافشان، س. مگوایر، ام. بازرسی پل: عملکرد انسانی، سیستم های هوایی بدون سرنشین و اتوماسیون. J. Civ. ساختار. مانیتور سلامت. 2018 ، 8 ، 443-476. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- درافشان، س. کوپمنز، سی. توماس، RJ; مگوایر، ام. شبکه های عصبی یادگیری عمیق برای بازرسی های ساختاری به کمک suas: امکان سنجی و کاربرد. در مجموعه مقالات کنفرانس بین المللی 2018 در مورد سیستم های هواپیمای بدون سرنشین، دالاس، TX، ایالات متحده، 12-15 ژوئن 2018؛ IEEE: نیویورک، نیویورک، ایالات متحده آمریکا، 2018؛ صص 874-882. [ Google Scholar ]
- خو، ژ. وو، ال ایکس؛ Zhang، ZX استفاده از یادگیری فعال برای نقشه برداری آسیب زلزله از ابرهای نقطه فتوگرامتری UAV. بین المللی J. Remote Sens. 2018 , 39 , 5568–5595. [ Google Scholar ] [ CrossRef ]
- وتریول، ا. گرکه، ام. کرل، ن. نکس، اف. Vosselman, G. تشخیص آسیب فاجعه از طریق استفاده هم افزایی از یادگیری عمیق و ویژگیهای ابر نقطه سه بعدی که از تصاویر هوایی مورب با وضوح بسیار بالا و یادگیری چند هستهای به دست میآیند. ISPRS-J. فتوگرام Remote Sens. 2018 ، 140 ، 45–59. [ Google Scholar ] [ CrossRef ]
- دوارته، دی. نکس، اف. کرل، ن. Vosselman, G. طبقهبندی تصاویر ماهوارهای آسیبهای ساختمان با استفاده از نمونههای تصویری هوابرد و ماهوارهای در رویکرد یادگیری عمیق. ISPRS Ann. فتوگرام Remote Sens. Spatial Inf. علمی 2018 ، IV-2 ، 89-96. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دوارته، دی. نکس، اف. کرل، ن. Vosselman, G. ترکیب ویژگی های چند رزولوشن برای طبقه بندی تصویر آسیب های ساختمان با شبکه های عصبی کانولوشن. Remote Sens. 2018 ، 10 ، 1636. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- کرل، ن. غفاریان، س. ناوروتزکی، آر. لپرت، جی. لچ، ام. ارزیابی مداخلات توسعه تاب آوری محور با سنجش از دور. Remote Sens. 2019 , 11 , 2511. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- نکس، اف. دوارته، دی. استین بیک، ا. Kerle، N. به سمت نقشه برداری آسیب ساختمان در زمان واقعی با راه حل های uav کم هزینه. Remote Sens. 2019 , 11 , 287. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Tsai، YC; شناسایی سریع فاجعه Wei، CC با استفاده از تشخیص خودکار علائم ترافیکی با پهپاد و هوش مصنوعی . مهندسین عمران Amer Soc: نیویورک، نیویورک، ایالات متحده آمریکا، 2019؛ صص 405-411. [ Google Scholar ]
- دوارته، دی. نکس، اف. کرل، ن. Vosselman, G. تشخیص آسیب های نما لرزه ای با تصاویر هوایی مورب چند زمانی. GISci. سنسور از راه دور در حال چاپ است.
- Li، YD; آره.؛ بارتولی، I. طبقه بندی نیمه نظارت شده آسیب طوفان از تصاویر هوایی پس از رویداد با استفاده از یادگیری عمیق. J. Appl. Remote Sens. 2018 , 12 , 045008. [ Google Scholar ] [ CrossRef ]
- Li، YD; هو، دبلیو. دونگ، اچ. تشخیص آسیب ساختمان Zhang، XY از تصاویر هوایی پس از رویداد با استفاده از انتخابگر چند جعبه تک شات. Appl. علمی 2019 ، 9 ، 1128. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لیانگ، X. بازرسی پس از فاجعه مبتنی بر تصویر از سیستمهای پل بتن مسلح با استفاده از یادگیری عمیق با بهینهسازی بیزی. Comput.-Aided Civ. زیرساخت. مهندس 2019 ، 34 ، 415-430. [ Google Scholar ] [ CrossRef ]
- نکس، اف. دوارته، دی. Tonolo، FG; Kerle، N. تشخیص آسیب ساختمان سازه با یادگیری عمیق: ارزیابی یک cnn پیشرفته در شرایط عملیاتی. Remote Sens. 2019 , 11 , 2765. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آهنگ، DM; تان، ایکس. وانگ، بی. ژانگ، ال. شان، XJ; Cui، JY ادغام روشهای تقسیمبندی سوپرپیکسل و یادگیری عمیق برای ارزیابی ساختمانهای آسیبدیده در اثر زلزله با استفاده از تصاویر سنجش از دور تک فاز. بین المللی J. Remote Sens. 2019 ، 41 ، 1040–1066. [ Google Scholar ] [ CrossRef ]
- هوانگ، اچ. Sun، GY; ژانگ، XM؛ هائو، ی.ال. ژانگ، AZ رن، جی سی. Ma, HZ شبکه عصبی کانولوشنال تقسیم بندی چند مقیاسی ترکیبی برای نقشه برداری سریع آسیب از تصاویر با وضوح بسیار بالا پس از زلزله. J. Appl. Remote Sens. 2019 , 13 , 022007. [ Google Scholar ] [ CrossRef ]
- وتریول، ا. گرکه، ام. کرل، ن. ووسلمن، جی. شناسایی نواحی آسیبدیده ساختاری در تصاویر مورب موجود در هوا با استفاده از رویکرد بصری-کیسه کلمات. Remote Sens. 2016 , 8 , 231. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گونگ، LX؛ وانگ، سی. وو، اف. ژانگ، جی اف. ژانگ، اچ. لی، کیو. تشخیص آسیب ساختمان ناشی از زلزله با تصاویر نورافکن خیره شده در زیر متر vhr terrasar-x پس از رویداد. Remote Sens. 2016 , 8 , 887. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سگدی، سی. لیو، دبلیو. جیا، YQ; سرمانت، پ. رید، اس. آنگلوف، دی. ایرهان، د. ونهوک، وی. رابینوویچ، الف. با پیچیدگی ها عمیق تر می رویم. در مجموعه مقالات کنفرانس IEEE 2015 در مورد دید رایانه و تشخیص الگو، بوستون، MA، ایالات متحده آمریکا، 7 تا 12 ژوئن 2015. IEEE: نیویورک، نیویورک، ایالات متحده آمریکا، 2015؛ صفحات 1-9. [ Google Scholar ]
- کوزیکانکی، جی. کرل، ن. Nex، F. قابلیت استفاده از فیلم های ویدئویی هوایی برای بازسازی صحنه سه بعدی و ارزیابی آسیب ساختاری. نات. سیستم خطرات زمین. علمی 2018 ، 18 ، 1583-1598. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- میتومی، اچ. یامزاکی، ف. Matsuoka, M. تشخیص خودکار آسیب ساختمان در اثر زلزله های اخیر با استفاده از تصویر تلویزیون هوایی. در بیست و یکمین کنفرانس آسیایی سنجش از دور، تایپه، تایوان، 2000 ; توسعه GIS: تایپه، تایوان، 2000; ص 401-406. [ Google Scholar ]
- Grünthal, G. European Macroseismic Scale 1998 (ems-98) ; Cahiers du Centre Européen de Géodynamique et de Séismologie, Centre Européen de Géodynamique et de Séismologie: Walferdange, Luxembourg, 1998; جلد 15، ص. 99. [ Google Scholar ]
- یامازاکی، اف. یانو، ی. Matsuoka, M. تفسیر آسیب بصری ساختمانهای شهر بم با استفاده از تصاویر پرنده سریع پس از زلزله 2003 بم، ایران. زمین Spectra 2005 ، 21 ، S328–S336. [ Google Scholar ] [ CrossRef ]
- کوربن، سی. سایتو، ک. دل اورو، ال. گیل، SPD; Piard، BE; Huyck، CK; کمپر، تی. لموئین، جی. اسپنس، RJS؛ شانکار، آر. و همکاران تجزیه و تحلیل جامع آسیب ساختمان در زلزله 12 ژانویه 2010 mw7 هائیتی با استفاده از تصاویر ماهواره ای و هوایی با وضوح بالا. فتوگرام مهندس Remote Sens. 2011 , 77 , 997–1009. [ Google Scholar ] [ CrossRef ]
- دوبوا، دی. Lepage, R. ارزیابی سریع و کارآمد آسیب ساختمان از تصاویر ماهواره ای نوری با وضوح بسیار بالا. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2014 , 7 , 4167–4176. [ Google Scholar ] [ CrossRef ]
- لی، دبلیو. Shuai، X. لیو، کیو. تجزیه و تحلیل ویژگی های آسیب ساختمان بر اساس تصویر سه بعدی از عکاسی مایل. جی. نات. بلایا 2016 ، 25 ، 152-158. [ Google Scholar ]
- لاتنزی، دی. بازسازی صحنه سه بعدی Miller, GR برای بازرسی پل روباتیک. J. زیرساخت. سیستم 2015 ، 21 ، 12. [ Google Scholar ] [ CrossRef ]
- زو، ی. گونزالس، وی. لیم، جی. آمور، ر. گوو، بی. باباییان جلودار، م. چارچوب سیستماتیک برای بازرسی پل پس از زلزله از طریق بازسازی uav و 3d bim. در مجموعه مقالات کنگره جهانی ساختمان CIB، هنگ کنگ، چین، 17 تا 21 ژوئن 2019؛ پ. 9. [ Google Scholar ]
- آکچای، اس. عطاپور ابرقویی، ع. Breckon، T. Skip-ganomaly: از تشخیص ناهنجاری رمزگذار-رمزگشای متصل و آموزش دیده خصمانه صرفنظر کنید. در مجموعه مقالات کنفرانس مشترک بین المللی شبکه های عصبی (IJCNN)، بوداپست، مجارستان، 14 تا 19 ژوئیه 2019؛ صص 1-8. [ Google Scholar ]
- لوکورسیو، آ. کافمن، ای. رانفتل، آر. دوسوویتسکی، آ. کلتون، وی. Scaramuzza، D. مسابقه هواپیماهای بدون سرنشین عمیق: از شبیه سازی تا واقعیت با تصادفی سازی دامنه. IEEE Trans. ربات. 2019 ، 1-14. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پالوسی، دی. لوکورسیو، آ. کونتی، اف. فلامند، ای. اسکاراموزا، دی. Benini، L. یک موتور ناوبری بصری مبتنی بر dnn 64 مگاواتی برای پهپادهای نانویی مستقل. IEEE Internet Things J. 2019 ، 6 ، 8357–8371. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وو، اچ. ژو، ز. فنگ، ام. یان، ی. خو، اچ. Qian, L. تشخیص تک شی در زمان واقعی در uav. در مجموعه مقالات کنفرانس بین المللی 2019 در مورد سیستم های هواپیمای بدون سرنشین، ICUAS 2019، آتلانتا، GA، ایالات متحده آمریکا، 11-14 ژوئن 2019؛ ص 1013-1022. [ Google Scholar ]
- سیام، م. ایکرداوی، اس. جمال، م. عبدالرازک، م. جاگرسند، م. ژانگ، اچ. تقسیمبندی بلادرنگ با ظاهر، حرکت و هندسه. در مجموعه مقالات کنفرانس بین المللی IEEE در مورد ربات ها و سیستم های هوشمند، مادرید، اسپانیا، 1 تا 5 اکتبر 2018؛ صص 5793–5800. [ Google Scholar ]
- دلمریکو، جی. مینتچف، اس. گیوستی، ع. گروموف، بی. ملو، ک. هوروات، تی. کادنا، سی. هاتر، م. Ijspeert، A. فلورانو، دی. و همکاران وضعیت فعلی و چشم انداز آینده رباتیک نجات. ربات صحرایی جی. 2019 ، 36 ، 1171-1191. [ Google Scholar ] [ CrossRef ]
- Trujillo, JC; مونگویا، آر. گوئرا، ای. Grau، A. پیکربندیهای slam مبتنی بر بصری برای سیستمهای چند UAV مشترک با یک عامل اصلی: یک رویکرد مبتنی بر مشاهدهپذیری. Sensors 2018 , 18 , 4243. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- باوله، اچ. سانچز-لوپز، جی ال. د لا پوئنته، پ. رودریگز راموس، آ. سمپدرو، سی. Campoy، P. تخمین ارتفاع پرواز سریع و مستحکم UAVهای چند روتوری در محیطهای بدون ساختار پویا با استفاده از حسگرهای ابر نقطه سه بعدی. Aerospace 2018 , 5 , 94. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژانگ، ایکس. شیان، بی. ژائو، بی. Zhang، Y. کنترل پرواز خودکار هلیکوپتر کوادروتور نانو در یک محیط فاقد GPS با استفاده از دید داخل هواپیما. IEEE Trans. الکترون صنعتی 2015 ، 62 ، 6392-6403. [ Google Scholar ] [ CrossRef ]
- پاردس، ج.ا. آلوارز، اف جی. آگیلرا، تی. Villadangos، JM 3D موقعیت یابی داخلی هواپیماهای uav با امواج فراصوت طیف گسترده و دوربین های زمان پرواز. Sensors 2018 , 18 , 89. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فالانگا، دی. کلبر، ک. مینتچف، اس. فلورانو، دی. Scaramuzza، D. پهپاد تاشو: یک کوادروتور شکلگیری که میتواند فشرده شود و پرواز کند. ربات IEEE. خودکار Lett. 2018 ، 4 ، 209-216. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کوئنزل، جی. نیوونهویسن، م. دروشل، دی. بیول، ام. هوبن، اس. Benke، S. بازرسی دودکش داخلی مبتنی بر mav خودمختار با مکانسازی لیزر سه بعدی و بازسازی سطح بافت. جی. اینتل. ربات. سیستم 2019 ، 93 ، 317-335. [ Google Scholar ] [ CrossRef ]
- شوایزر، EA; استو، دی. Coulter, LL اتوماسیون تقریباً بلادرنگ، تشخیص پس از خطر آسیب ترک به زیرساخت های حیاتی. فتوگرام مهندس Remote Sens. 2018 , 84 , 76–87. [ Google Scholar ] [ CrossRef ]
- سانچز-کوواس، پی جی. رامون سوریا، پ. آرو، بی. اولرو، آ. Heredia, G. سیستم رباتیک برای بازرسی با تماس تیرهای پل با استفاده از uavs. Sensors 2019 , 19 , 305. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- Jimenez-Cano، AE; هردیا، جی. Ollero، A. دستکاری کننده هوایی با بازوی سازگار برای بازرسی پل. در مجموعه مقالات کنفرانس بین المللی 2017 در مورد سیستم های هواپیمای بدون سرنشین (ICUAS)، میامی، FL، ایالات متحده آمریکا، 13 تا 16 ژوئن 2017؛ ص 1217-1222. [ Google Scholar ]
- لین، ال. یانگ، ی. چنگ، اچ. Chen, X. کنترل هوایی مبتنی بر دید خودمختار برای وسایل نقلیه هوایی بدون سرنشین روتورکرافت. Sensors 2019 , 19 , 3410. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- روجیرو، اف. لیپیلو، وی. اولرو، A. مقدمه ای بر موضوع ویژه در دستکاری هوایی. ربات IEEE. خودکار Lett. 2018 ، 3 ، 2734-2737. [ Google Scholar ] [ CrossRef ]
- سالان، سی جی; تاداکوما، ک. اوکادا، ی. اوهنو، ک. Tadokoro، S. Uav با دو پوسته نیمکره ای دوار غیرفعال و روتور افقی برای بازرسی چکشی زیرساخت. در مجموعه مقالات سمپوزیوم بین المللی IEEE/SICE 2017 در مورد یکپارچه سازی سیستم، تایپه، تایوان، 11 تا 14 دسامبر 2017؛ صص 769-774. [ Google Scholar ]



بدون دیدگاه