

یک الگوریتم جدید محلی سازی و نقشه برداری همزمان زیر آب بر اساس شبکه عصبی
خلاصه
کلید واژه ها:
AUVs _ AMB-SLAM ; شبکه عصبی ؛ چراغ های مغناطیسی
1. معرفی
2. مواد و روشها
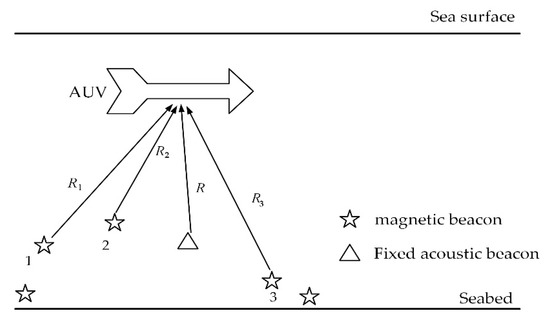
2.1. شرح اصل موقعیت یابی بیکن میدان مغناطیسی فرکانس پایین
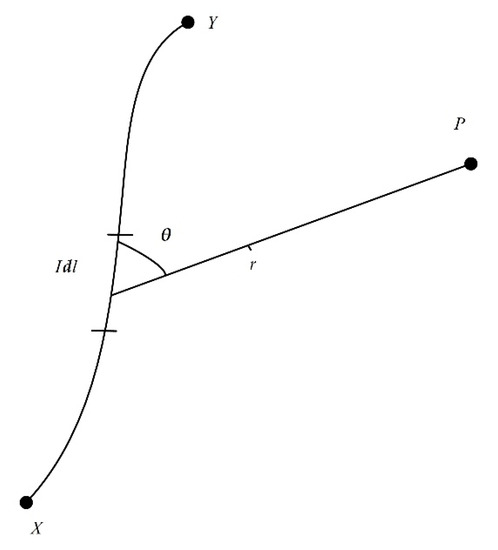
روش محلی سازی میدان مغناطیسی بر اساس اصل اساسی قانون Biot-Savart استفاده از میدان مغناطیسی متناوب فرکانس پایین به عنوان منبع سیگنال است. قانون Biot-Savart میدان مغناطیسی تولید شده توسط یک قطعه حامل جریان را توضیح می دهد. همانطور که در شکل 1 نشان داده شده است ، یک سیم جریان جهت خاصی را حمل می کند I�، گرفتن یک عنصر کوچک از سیم طول d�. جهت این عنصر در امتداد جریان است به طوری که یک بردار را تشکیل می دهد Idl⃗ ���→. بزرگی میدان مغناطیسی dB⃗ ��→در یک فاصله r�از یک عنصر حامل جریان dl��متناسب با I�و به طول dl��و با مکعب فاصله نسبت عکس دارد r�. قانون Biot-Savart به شرح زیر است:
جایی که dB⃗ ��→میدان مغناطیسی در نقطه میدان است P�، که به دلیل وجود عنصر فعلی تولید می شود Idl⃗ ���→; dl⃗ ��→طول بی نهایت کوچک رسانای حامل جریان الکتریکی است I�; r⃗ �→بردار فاصله است که جهت فاصله را مشخص می کند r�از عنصر فعلی تا نقطه میدان؛ L�مسیر ادغام است. و μ0�0نفوذپذیری خلاء است که مقدار آن برابر است 4π×10−74�×10−7Tm/A. r�به صورت زیر تعریف می شود:
جایی که x�، y�و z�موقعیت های نقطه میدان در مختصات محلی هستند. موقعیت منبع میدان مغناطیسی به صورت (0 متر، 0 متر، 0 متر) در نظر گرفته می شود.
2.2. شرح شبکه عصبی مصنوعی
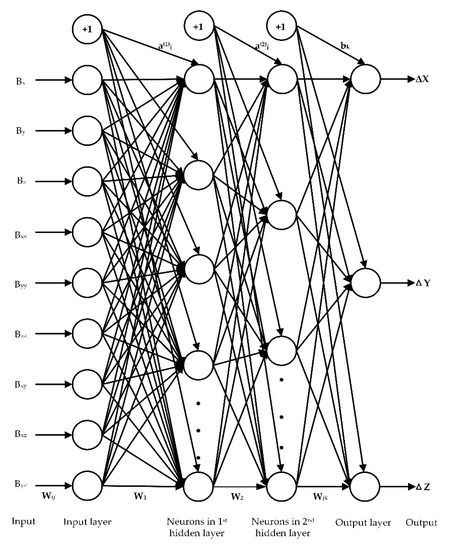
در تحقیق حاضر فرض بر این است که تعداد نورون های لایه ورودی است n�، تعداد نورون های لایه پنهان است l�، و تعداد نورون های لایه خروجی است m�. انتشار رو به جلو MLP ANN عمدتا از سه بخش تشکیل شده است. اولا، MLP جمع وزنی خطی n ورودی خود را به صورت ریاضی محاسبه می کند:
جایی که xj��مجموع وزنی خطی همه ورودی ها است، wij���وزن سیناپس بین است ith�thنورون و jth�thنورون، xi��بردار ورودی است، aj��مقدار بایاس از لایه ورودی به لایه پنهان و زیرنویس است n�تعداد نورون های لایه ورودی را نشان می دهد. سپس، خروجی نورون های لایه پنهان را می توان به صورت زیر نمایش داد:
جایی که Hj��خروجی نورون های لایه پنهان است و f(⋅)�(·)تابع فعال سازی است (به فرمول (6) مراجعه کنید). در مطالعه حاضر، تابع فعال سازی انتخاب شده یک تابع فعال سازی مماس هیپربولیک است:
در نهایت، خروجی نورون لایه خروجی MLP-ANN را می توان به صورت زیر نشان داد:
جایی که wjk���وزن اتصال بین است j th�thنورون و نورون k ام، بj��مقدار بایاس از لایه پنهان به لایه خروجی و زیرنویس است ل�تعداد نورون های لایه پنهان را نشان می دهد.
2.3. بهینه سازی MLP-ANN
2.3.1. پیش پردازش داده ها
داده های میدان مغناطیسی و موقعیت نسبی بین فانوس های مغناطیسی و AUV فانوس مغناطیسی که در میدان جمع آوری شده بودند، به عنوان داده های نمونه شبکه عصبی در نظر گرفته شد. وقتی دادههای نمونه محدودی در دسترس هستند، ممکن است به حداکثر رساندن استفاده از مجموعه داده ورودی نماینده مشکل باشد. در همین حال، همچنین ضروری است که دادههای آموزشی و دادههای اعتبارسنجی نماینده همان جامعه باشند. بنابراین، ما روش Holout را اتخاذ کردیم [ 72 ، 73]، مجموعه داده های ورودی را به دو زیر مجموعه تقسیم می کند: 10٪ از داده ها برای اعتبارسنجی و داده های باقی مانده برای آموزش شبکه. بهعلاوه، متغیرهای مختلف دامنههای متفاوتی را در بر میگیرند و همه دادههای نمونه نمیتوانند توجه یکسانی را در طول مراحل آموزش دریافت کنند (به زیر مراجعه کنید). بنابراین، در این آزمایش، مقیاس بندی تمام داده های نمونه در یک محدوده مشخص با استفاده از رابطه (8) ضروری است. علاوه بر این، مقیاس بندی مجموعه های ورودی باید با مرز تابع فعال سازی استفاده شده در لایه خروجی یا لایه پنهان سازگار باشد [ 74 ]. فرمول استانداردسازی به صورت زیر تعریف می شود:
جایی که ایکسدقیقه�minو ایکسحداکثر�maxبه ترتیب حداقل و حداکثر مقدار مجموعه های ورودی هستند، fدقیقه�minو fحداکثر�maxبه ترتیب حداقل و حداکثر مقدار تابع فعال سازی و زیرنویس هستند من�نشان دهنده شماره داده ورودی است. مقدار تابع انتقال مماس هذلولی بین -1 و 1 است، بنابراین، داده های نمونه در محدوده 0.9- تا 0.9 مقیاس بندی می شوند. بنابراین، معادله (8) به صورت زیر ارائه می شود:
2.3.2. آموزش
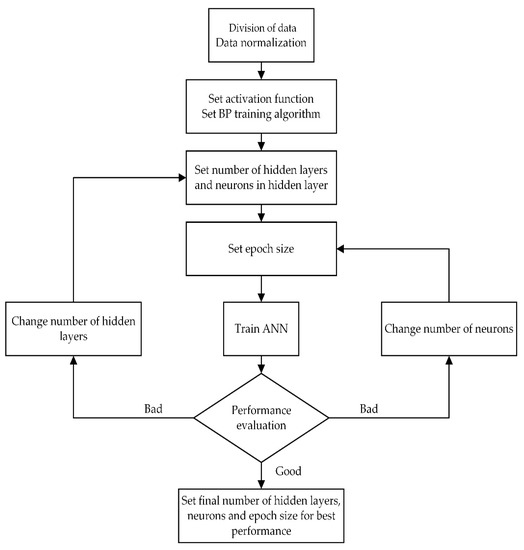
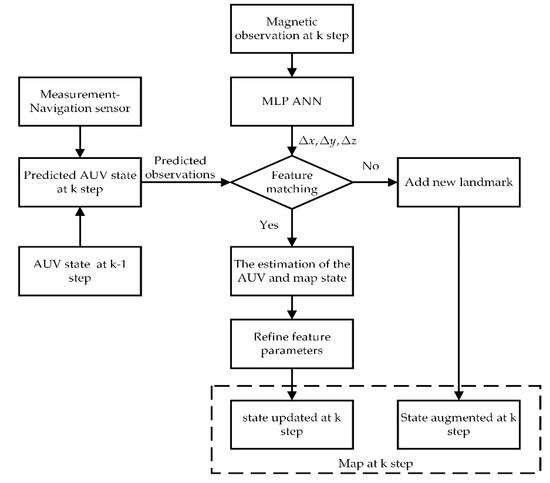
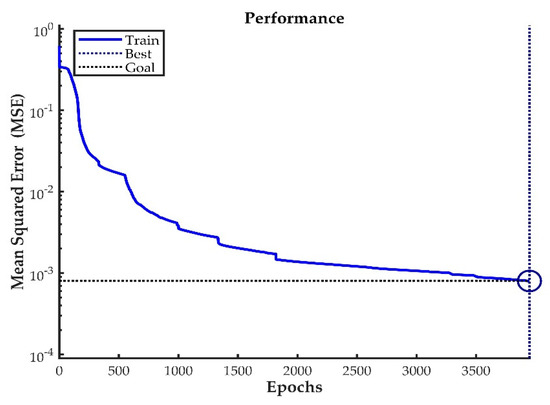
فرآیند آموزش شبکه عصبی مصنوعی شامل بهینهسازی وزنهای عصبی با تنظیم پارامترهای داخلی MLP-ANN (مانند تعداد لایههای پنهان، نورونهای آنها و غیره، همانطور که در شکل 3 نشان داده شده است ) با آزمون و خطا است که به آن نیز گفته میشود. ‘یادگیری’. هدف از یادگیری یافتن یک راه حل جهانی بهینه برای معادله هدف بسیار غیرخطی [ 75 ] و به حداقل رساندن مقدار تابع خطا است. در مطالعه حاضر، میانگین مربعات خطا (MSE) در نمونههای آموزشی تابع خطای ارزیابی عملکرد شبکه عصبی مصنوعی بود که باید بهینهسازی شود و کمینهسازی تابع خطا با تکنیکهای تکراری انجام میشود. تابع عملکرد به شرح زیر است:
جایی که Yک��خروجی واقعی را نشان می دهد، Oک��خروجی های واقعی را نشان می دهد، متر�تعداد گره های خروجی را نشان می دهد و هک��m امین خروجی باقیمانده است . برای دستیابی به معماری بهینه، طبق نمودار جریان کار که در شکل 3 نشان داده شده است، مراحل مختلفی دنبال شده است . وزن با روش گرادیان نزولی بهینه شد. در ابتدای آموزش، وزن ها به مقادیر تصادفی صفر-میانگین مقداردهی اولیه شدند. این معادله به روز رسانی وزن از [ 76 ] استخراج شده است:
جایی که wj + 1��+1نشان دهنده مقدار وزن به روز شده است، wj��نشان دهنده مقدار وزن اولیه است ηj��میزان یادگیری است ( ηj��متناسب با اندازه مراحل است) دj��جهت نزول و زیرنویس است n�نشان دهنده زمان به روز رسانی است. جهت نزول دj��منفی گرادیان خطا است. فرمول نهایی به روز رسانی وزن است
جایی که ∇w jE∇���گرادیان خطا است.
2.4. شرح الگوریتم پیشنهادی AMB-SLAM
حال، با فرض اینکه این فانوس های مغناطیسی نشانه های ثابت با اختلال ورودی صفر هستند، مدل من�th beacon را می توان به صورت زیر ساده کرد:
جایی که بnمن( ک )���(�)محل است من�فانوس دریایی در آن زمان ک�.
2.4.1. معادله حالت
هنگامی که مدل سینماتیکی AUV شناخته شده است، موقعیت نسبی چراغ مغناطیسی از وسیله نقلیه را می توان از طریق مدل بهینه MLP-ANN به دست آورد و مدل ریاضی تقویت شده تخمین حالت را می توان ایجاد کرد. وضعیت با استفاده از فیلتر EKF تخمین زده می شود و حالت AUV با مختصات محلی و زاویه سمت آن به صورت توصیف می شود.
با کوواریانس آن Pv��
جایی که Xv(k)��(�)حالت حرکت AUV در زمان است k�، pv(k)=[xv(k)yv(k)]��(�)=[��(�)��(�)]نشان دهنده موقعیت AUV در سیستم مختصات محلی است، و ϕv(k)��(�)نشان دهنده زاویه حرکت AUV در زمان است k�.
مختصات ویژگی n به صورت نشان داده می شود xm(k)=(xb(k),yb(k))Txm(�)=(��(�),��(�))�، و نشانه های محیطی را می توان به عنوان نشان داد
و ماتریس کوواریانس آن Pm��است
عناصر غیر قطری ماتریس کوواریانس Pm��اطلاعات همبستگی متقابل بین نشانه های مختلف هستند. ما فرض می کنیم که نشانه ها ثابت هستند و موقعیت آنها در طول زمان تغییر نمی کند. این همبستگی ها با هر مشاهده مجدد افزایش می یابد. نقشه نقطه عطف با یک بردار حالت افزوده نشان داده می شود:
اگر مقدار تغییر حالت AUV با تغییر مسیر در زمان مجاور نشان داده شود، تغییر فاصله در جهت مسیر و جهت مسیر عمودی را می توان به صورت زیر نوشت: Δ X=[Δ xΔ yΔ ϕ]تی��=[������]�و موقعیت AUV را می توان به صورت زیر توصیف کرد:
با توجه به معادله حالت فوق، ماتریس ژاکوبین به صورت زیر نمایش داده می شود:
2.4.2. معادله مشاهده
در مطالعه حاضر، مقدار مشاهده موقعیت نسبی و زاویه بین فانوس مغناطیسی و AUV است. اگر یک مشخصه موجود از کمیت مشاهده شده و یک متغیر حالت تعیین شود، (ایکسبمن،yبمن)(ایکسبمن،�بمن)موقعیت چراغ مغناطیسی در نقشه است. سپس با توجه به موقعیت تخمینی AUV و فانوس دریایی بمنبمن، می توانیم معادله مشاهده تخمین زده شده را بدست آوریم:
ماتریس ژاکوبین برای معادله مشاهده فوق به دست آمد:
جایی که r�نشان دهنده فاصله بین beacon و AUV و r2=[ایکسبمن− x ( k ) ]2+[yبمن– y( ک ) ]2�2=[ایکسبمن-ایکس(ک)]2+[�بمن-�(ک)]2.
تعریف می کنیم آرآرکوواریانس اندازه گیری و نوآوری باشد v�تفاوت بین مقدار واقعی و مقدار پیش بینی شده را نشان می دهد:
ماتریس کوواریانس افزایش است
سود کالمن دبلیودبلیوبه صورت بیان می شود
مکان به روز شده و کوواریانس را می توان به شرح زیر توصیف کرد
2.4.3. در حال بروز رسانی
با فرض اینکه اندازه گیری مطمئن z=[rϕ]تی�=[��]تیاصلی از یک ویژگی جدید، ( x ، y)(ایکس،�)نشان دهنده موقعیت AUV، و r ، ϕ�،�نشان دهنده موقعیت و زاویه نسبی بین AUV و چراغ جدید است، بنابراین چراغ جدید را می توان به صورت زیر توصیف کرد.
دولت جدید است
3. نتایج تجربی و بحث
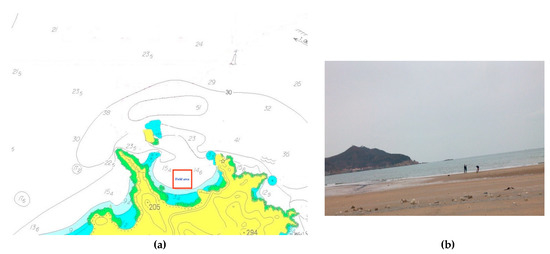
3.1. مجموعه داده ها
3.2. پیکربندی بهینه MLP-ANN
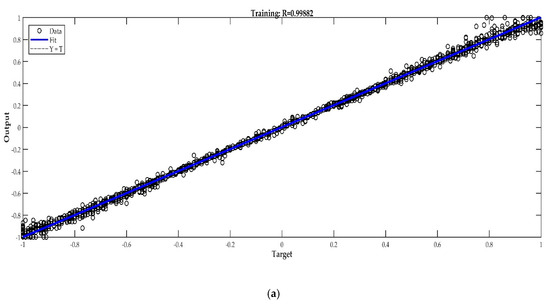
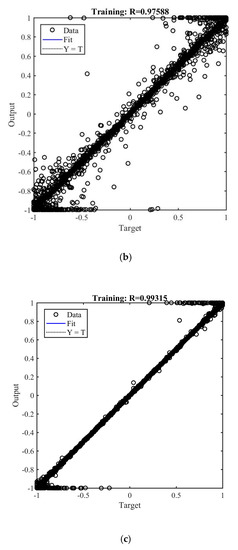
در مطالعه حاضر، تابع فعال سازی مماس هذلولی را به عنوان تابع فعال سازی تنظیم می کنیم. الگوریتم یادگیری BP است. تعداد دوره ها برابر با 1000 است. دقت گل برابر است با 8×10−48×10−4; و نرخ یادگیری قبل از بهینه سازی شبکه عصبی برابر با 0.01 است. عملکرد MLP-ANN با تغییر تعداد لایههای پنهان و تعداد نورونها در هر لایه پنهان مقایسه شد. بهترین معماری شبکه بر اساس چندین معیار آماری از جمله MSE و ضریب تعیین انتخاب می شود. R2�2).
جایی که n�تعداد داده های نمونه است. و x¯�¯، y¯i�¯�و z¯i�¯�مقادیر متوسط داده های نمونه هستند.
3.3. تنظیمات شبیه سازی نقشه حلقه AMB-SLAM
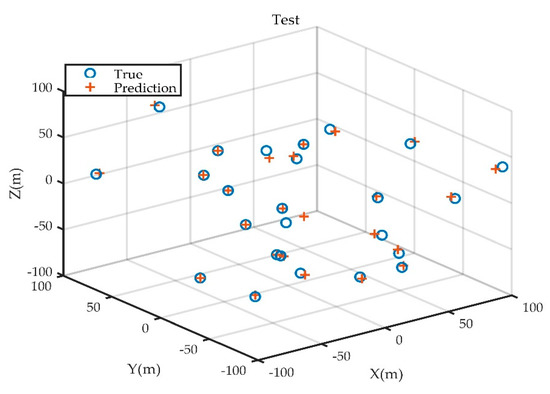
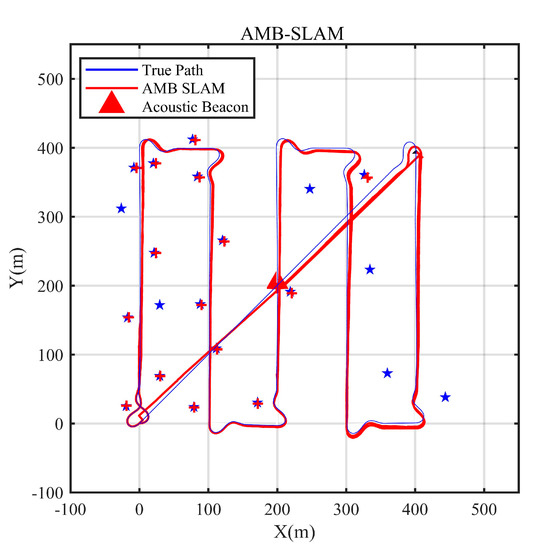
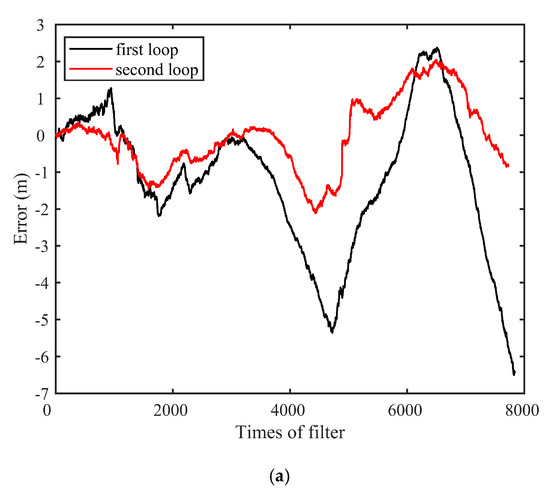
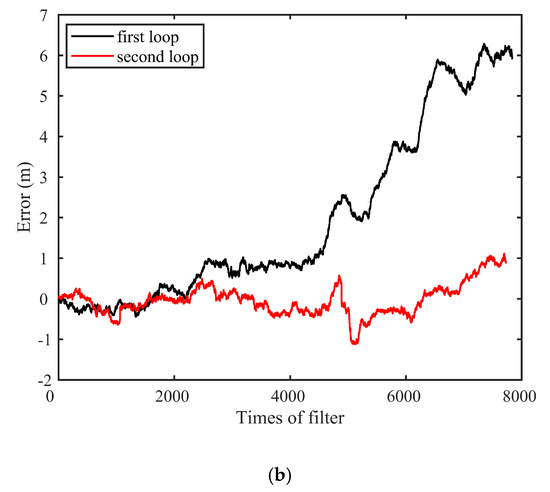
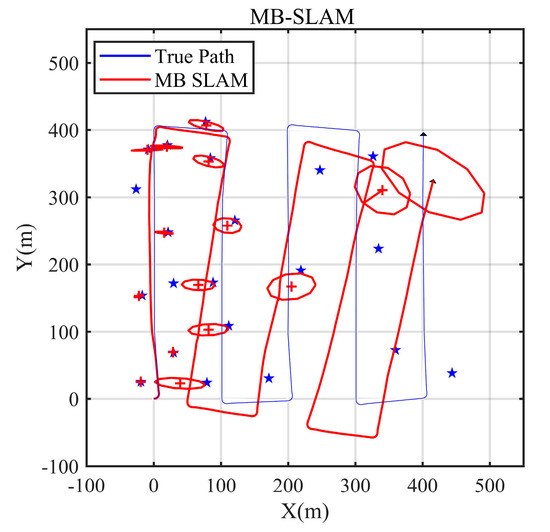
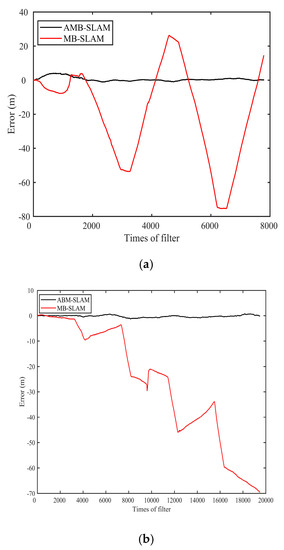
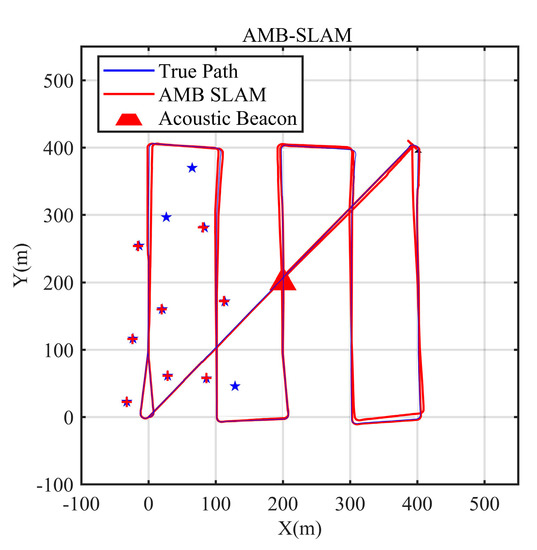
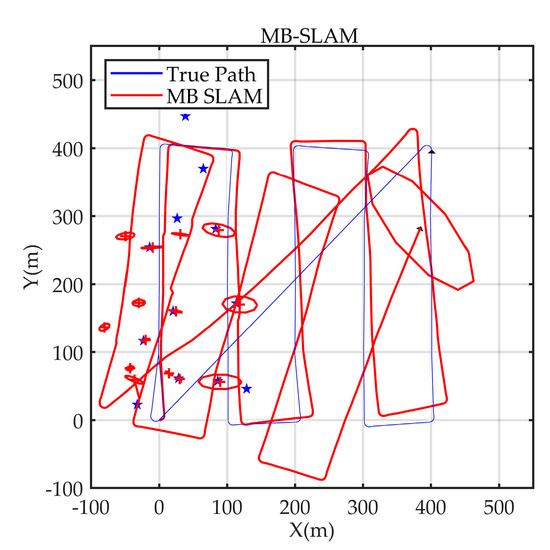
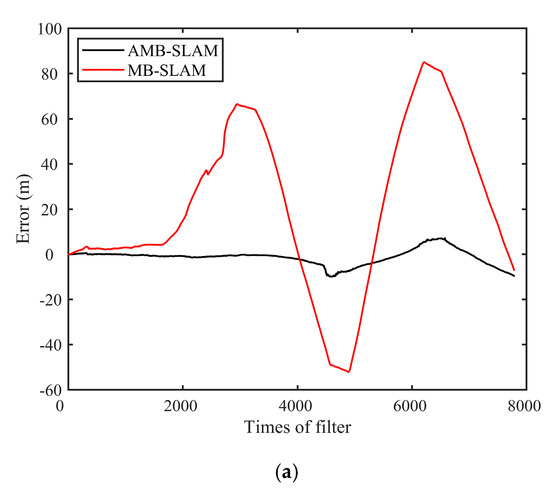
3.4. نتایج و بحث شبیه سازی AMB-SLAM
4. نتیجه گیری و کار آینده
4.1. نتیجه گیری
4.2. کار آینده
منابع
- پاول، ال. سعیدی، س. ستو، م. Li, H. AUV ناوبری و محلی سازی: بررسی. IEEE J. Ocean. مهندس 2014 ، 39 ، 131-149. [ Google Scholar ] [ CrossRef ]
- Antonelli, G. Underwater Robots , 4th ed.; Springer: برلین/هایدلبرگ، آلمان، 2018; صص 1–350. [ Google Scholar ]
- کلومینا، آی. Molina, P. سیستم های هوایی بدون سرنشین برای فتوگرامتری و سنجش از دور: یک بررسی. ISPRS J. Photogramm. Remote Sens. 2014 ، 92 ، 79-97. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تیپسووان، ی. Hoonsuwan، P. طراحی و اجرای AUV برای بازرسی خط لوله نفت. در مجموعه مقالات هفتمین کنفرانس بین المللی فناوری اطلاعات و مهندسی برق در سال 2015 (ICITEE)، چیانگ مای، تایلند، 29 تا 30 اکتبر 2015؛ صص 382-387. [ Google Scholar ]
- روه، اچ. جو، اچ. Yu, S. AUV با هدف اسکن گسترده منطقه با چند عامل متصل (SWAN). در مجموعه مقالات خودروهای زیر آب خودمختار IEEE/OES 2016 (AUV)، توکیو، ژاپن، 6 تا 9 نوامبر 2016؛ صص 10-13. [ Google Scholar ]
- اندرسون، بی. Crowell, J. Workhorse AUV-یک وسیله نقلیه زیرآبی خودمختار جدید مقرون به صرفه برای بررسی/صداگیری، جستجو و نجات، و تحقیق. In Proceedings of the OCENS 2005 MTS/IEEE, Washington, DC, USA, 17-23 سپتامبر 2005; صص 1-6. [ Google Scholar ]
- ماتوس، آ. مارتینز، ای. دیاس، ا. فریرا، بی. Almeida، JM; فریرا، اچ. آمارال، جی. فیگوایردو، آ. آلمیدا، ر. Silva, F. عملیات ربات های متعدد برای جستجو و نجات دریایی در رقابت euRathlon 2015. در مجموعه مقالات OCENS 2016، شانگهای، چین، 10-13 آوریل 2016. صص 1-7. [ Google Scholar ]
- مورفی، RR; Dreger، KL; نیوزوم، اس. رودوکر، جی. سلاخ، بی. اسمیت، آر. استیمل، ای. کیمورا، تی. مکابه، ک. کن، ک. و همکاران سیستمهای چند ربات ناهمگن دریایی در سونامی بزرگ ژاپن شرقی. ربات صحرایی جی. 2012 ، 29 ، 819-831. [ Google Scholar ] [ CrossRef ]
- یورگر، DR. جاکوبا، م. بردلی، AM; بینگهام، بی. تکنیکهایی برای بررسی اعماق دریا در نزدیکی کف با استفاده از یک وسیله نقلیه زیر آب خودمختار. در Springer Trac Adv Ro , 1st ed.; Thrun, S., Brooks, R., Durrant-Whyte, H., Eds. Springer: برلین/هایدلبرگ، آلمان، 2007; جلد 28، ص 416–429. [ Google Scholar ]
- جاکوبا، ام وی؛ رومن، CN; سینگ، اچ. مورفی، سی. کونز، سی. ویلیس، سی. ساتو، تی. Sohn, RA ناوبری صوتی خط پایه طولانی برای عملیات خودروهای زیر آب خودمختار زیر یخ. ربات صحرایی جی. 2008 ، 25 ، 861-879. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کونز، سی. مورفی، سی. سینگ، اچ. پونتبریاند، سی. Sohn، RA; سینگ، اس. ساتو، تی. رومن، سی. ناکامورا، ک.-ای. جاکوبا، م. و همکاران به سوی اکتشاف فراسیاره ای زیر یخ: گام های روباتیک در قطب شمال. ربات صحرایی جی. 2009 ، 26 ، 411-429. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Eustice, RM; سینگ، اچ. Leonard, JJ فیلترهای وضعیت تاخیری بسیار پراکنده برای SLAM مبتنی بر نمایش. IEEE Trans. ربات. 2006 ، 22 ، 1100-1114. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کوسات، NH; چادول، سی دی; زیمرمن، آر. موقعیت یابی مطلق یک وسیله نقلیه زیر آب خودمختار با استفاده از GPS و اندازه گیری های صوتی. IEEE J. Ocean. مهندس 2005 ، 30 ، 153-164. [ Google Scholar ] [ CrossRef ]
- واسیلسکو، آی. دیتوایلر، سی. دونیک، م. گردان، د. سوسنوفسکی، اس. استامف، جی. Rus, D. AMOUR V: ربات شناور زیر آب کارآمد انرژی با قابلیت بارگذاری پویا. بین المللی ربات جی. Res. 2010 ، 29 ، 547-570. [ Google Scholar ] [ CrossRef ]
- LaPointe، CEG Virtual Long Baseline (VLBL) مسیریابی خودکار خودروهای زیر آب با استفاده از یک فرستنده واحد. پایان نامه لیسانس، موسسه فناوری ماساچوست، کمبریج، MA، ایالات متحده آمریکا، 2006. [ Google Scholar ]
- یانگبرگ، جی دبلیو. روش رم، نیویورک برای گسترش GPS به برنامه های زیر آب. پتنت ایالات متحده 5119341، 2 ژوئن 1992. [ Google Scholar ]
- Youngberg, JW روشی جدید برای گسترش GPS به برنامه های کاربردی زیر آب. Navigation 1991 , 38 , 263-271. [ Google Scholar ] [ CrossRef ]
- اسگوربینی، اس. پیرانو، آ. کوسیتو، اس. Morgigni، M. یک سیستم ردیابی زیر آب برای نقشه برداری جوامع دریایی یک برنامه کاربردی برای Posidonia oceanica. اوشنول. Acta 2002 ، 25 ، 135-138. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- توماس، HG GIB یک رابط بین فضا و اعماق اقیانوس ها ایجاد می کند. در مجموعه مقالات کارگاه 1998 در مورد وسایل نقلیه خودمختار زیر آب، کمبریج، MA، ایالات متحده آمریکا، 20-21 اوت 1998; ص 181-184. [ Google Scholar ]
- الکوسر، ا. اولیویرا، پی. Pascoal, A. مطالعه و اجرای یک سیستم موقعیت یابی زیر آب مبتنی بر EKF GIB. مهندسی کنترل تمرین کنید. 2007 ، 15 ، 689-701. [ Google Scholar ] [ CrossRef ]
- باتیستا، پی. سیلوستر، سی. فیلتر موقعیت و سرعت LBL/USBL با اتصال محکم Oliveira، P. GAS برای وسایل نقلیه زیر آب. در مجموعه مقالات کنفرانس کنترل اروپا 2013 (ECC)، زوریخ، سوئیس، 17-19 ژوئیه 2013; صفحات 2982-2987. [ Google Scholar ]
- باتیستا، پی. سیلوستر، سی. Oliveira, P. GES سیستم ناوبری LBL/USBL یکپارچه برای وسایل نقلیه زیر آب. در مجموعه مقالات پنجاه و یکمین کنفرانس IEEE در مورد تصمیم گیری و کنترل، مائوئی، HI، ایالات متحده آمریکا، 10-13 دسامبر 2012. صفحات 6609-6614. [ Google Scholar ]
- باتیستا، پی. سیلوستر، سی. Oliveira, P. سیستم ناوبری یکپارچه خط پایه بلند/خط پایه بسیار کوتاه جفت شده محکم. بین المللی جی. سیست. علمی 2014 ، 47 ، 1837-1855. [ Google Scholar ] [ CrossRef ]
- Vickery، K. سیستم های موقعیت یابی صوتی. مفاهیم جدید – آینده در مجموعه مقالات کارگاه 1998 در مورد وسایل نقلیه خودمختار زیر آب، کمبریج، MA، ایالات متحده آمریکا، 20-21 اوت 1998; صص 103-110. [ Google Scholar ]
- Whitcomb، LL; یورگر، DR. سینگ، اچ. Howland, J. ناوبری ترکیبی داپلر/LBL در وسایل نقلیه زیر آب. در مجموعه مقالات یازدهمین سمپوزیوم بین المللی در مورد فناوری غوطه ور بدون سرنشین، دورهام، NH، ایالات متحده آمریکا، 22 تا 25 اوت 1999. صص 1-7. [ Google Scholar ]
- اسپیندل، آر. پورتر، آر. مارکت، دبلیو. Durham, J. یک سیستم ناوبری صوتی زیر آب پالس داپلر با وضوح بالا. IEEE J. Ocean. مهندس 1976 ، 1 ، 6-13. [ Google Scholar ] [ CrossRef ]
- پانیش، ر. Taylor, M. دستیابی به دقت ناوبری بالا با استفاده از سیستم های ناوبری اینرسی در وسایل نقلیه زیر آب خودمختار. در مجموعه مقالات IEEE OCENS 2011، Santander، اسپانیا، 6-9 ژوئن 2011. صص 1-7. [ Google Scholar ]
- فالون، MF; کیس، م. یوهانسون، اچ. لئونارد، JJ Efficient AUV ناوبری با ادغام محدوده صوتی و سونار اسکن جانبی. در مجموعه مقالات کنفرانس بین المللی IEEE 2011 در مورد رباتیک و اتوماسیون، شانگهای، چین، 9 تا 13 مه 2011. ص 2398–2405. [ Google Scholar ]
- مورگادو، م. اولیویرا، پی. سیلوستر، سی. Vasconcelos، JF جاسازی شده دینامیک خودرو که به سیستم ناوبری زیر آب USBL/INS کمک می کند. IEEE Trans. سیستم کنترل تکنولوژی 2014 ، 22 ، 322-330. [ Google Scholar ] [ CrossRef ]
- واتانابه، ی. اوچی، اچ. شیمورا، تی. هاتوری، تی. موقعیتیابی صوتی زیر آب با خط پایه فوقالعاده کوتاه با استفاده از دادههای ناوبری اینرسی با استفاده از ارتباطات طیف گسترده برای وسیله نقلیه زیر آب خودمختار و تجزیه و تحلیل خطا در آبهای عمیق پشتیبانی میشود. Jpn. J. Appl. فیزیک 2009 ، 48 ، 1-12. [ Google Scholar ] [ CrossRef ]
- مورگادو، م. اولیویرا، پی. Silvestre، C. سیستم ناوبری فوق کوتاه و ناوبری اینرسی برای وسایل نقلیه زیر آب: یک اعتبارسنجی تجربی. ربات صحرایی جی. 2013 ، 30 ، 142-170. [ Google Scholar ] [ CrossRef ]
- مورگادو، م. اولیویرا، پی. سیلوستر، سی. Vasconcelos، JF USBL/INS تکنیک ادغام محکم جفت شده برای وسایل نقلیه زیر آب. در مجموعه مقالات نهمین کنفرانس بین المللی فیوژن اطلاعات، فلورانس، ایتالیا، 10 تا 13 ژوئیه 2006. صص 1-8. [ Google Scholar ]
- چوی، W.-S. Hoang، N.-M.; یونگ، J.-H. لی، جی.-ام. توسعه سیستم ناوبری وسایل نقلیه زیر آب با استفاده از ترکیب سنسور GPS/INS. در مجموعه مقالات هفتمین کنفرانس بین المللی رباتیک و کاربردهای هوشمند، گوانگژو، چین، 17 تا 20 دسامبر 2014. ص 491-497. [ Google Scholar ]
- Knight، DT توسعه سریع سیستمهای GPS/INS با اتصال محکم. IEEE Aerosp. الکترون. سیستم Mag. 1997 ، 12 ، 14-18. [ Google Scholar ] [ CrossRef ]
- تال، ا. کلاین، آی. Katz، R. سیستم ناوبری اینرسی/ ثبت سرعت داپلر (INS/DVL) با اندازهگیریهای جزئی DVL. Sensors 2017 , 17 , 415. [ Google Scholar ] [ CrossRef ]
- اسمیت، آر. خود، م. Cheeseman, P. برآورد روابط فضایی نامشخص در رباتیک. در هوش ماشینی و تشخیص الگو ؛ Lemmer, JF, Kanal, LN, Eds. شمال هلند: منلو پارک، کالیفرنیا، ایالات متحده آمریکا، 1988; جلد 5، ص 435-461. [ Google Scholar ]
- اسمیت، آر. خود، م. Cheeseman، P. یک نقشه تصادفی برای روابط فضایی نامشخص. در مجموعه مقالات سمپوزیوم بین المللی تحقیقات رباتیک، سانتا کلارا، کالیفرنیا، ایالات متحده آمریکا، 10-11 اوت 1988; ص 467-474. [ Google Scholar ]
- دورانت وایت، اچ. بیلی، تی. محلی سازی و نقشه برداری همزمان: قسمت اول. ربات IEEE. خودکار Mag. 2006 ، 13 ، 99-108. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پیرژالا، م. گیگوئر، پی. Astrup، R. نقشه برداری جنگل ها با استفاده از وسیله نقلیه زمینی بدون سرنشین با LiDAR سه بعدی و graph-SLAM. محاسبه کنید. الکترون. کشاورزی 2018 ، 145 ، 217-225. [ Google Scholar ] [ CrossRef ]
- Kownacki، C. مفهومی از اسکنر لیزری که برای تحقق اجتناب از موانع سه بعدی برای یک پهپاد بال ثابت طراحی شده است. Robotica 2014 ، 34 ، 243-257. [ Google Scholar ] [ CrossRef ]
- مونگویا، آر. اورزوا، اس. بولیا، ی. Grau, A. سیستم SLAM مبتنی بر ویژن برای وسایل نقلیه هوایی بدون سرنشین. Sensors 2016 , 16 , 372. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- ما، تی. لی، ی. وانگ، آر. Cong، Z. گونگ، Y. AUV بومی سازی و نقشه برداری همزمان عمق سنجی قوی. مهندس اقیانوس 2018 ، 166 ، 336-349. [ Google Scholar ] [ CrossRef ]
- هیدالگو، اف. Bräunl, T. بررسی تکنیک های SLAM زیر آب. در مجموعه مقالات کنفرانس بین المللی اتوماسیون، رباتیک و کاربردها، کوئینستون، نیوزلند، 17 تا 19 فوریه 2015. صص 306-311. [ Google Scholar ]
- Woock, P. بررسی ویژگی های سه بعدی مناسب برای ناوبری زیر آب مبتنی بر سونار. In Proceedings of the 2012 Oceans, Yeosu, Korea, 21–24 May 2012; صص 1-6. [ Google Scholar ]
- Eustice, RM; پیزارو، او. سینگ، اچ. ناوبری بصری تقویت شده برای وسایل نقلیه زیر آب خودمختار. IEEE J. Ocean. مهندس 2008 ، 33 ، 103-122. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Eustice, RM; سینگ، اچ. لئونارد، جی جی. والتر، MR نقشه برداری بصری تایتانیک RMS: برآوردهای کوواریانس محافظه کارانه برای فیلترهای اطلاعات SLAM. بین المللی ربات جی. Res. 2006 ، 25 ، 1223-1242. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فرفیلد، ن. کانتور، جی. جوناک، دی. Wettergreen، D. اکتشاف و نقشه برداری خودمختار از فروچاله های سیل زده. بین المللی ربات جی. Res. 2010 ، 29 ، 748-774. [ Google Scholar ] [ CrossRef ]
- فرفیلد، ن. کانتور، جی. Wettergreen، D. SLAM بلادرنگ با شبکههای شواهد Octree برای اکتشاف در تونلهای زیر آب. ربات صحرایی جی. 2007 ، 24 ، 3-21. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مکی، تی. کوندو، اچ. اورا، تی. ساکامکی، تی. میدانهای دریچه تصویربرداری: طرح ناوبری مبتنی بر SLAM برای تصویربرداری AUV به سمت تصویربرداری از بستر دریا. در مجموعه مقالات خودروهای زیر آب خودمختار IEEE/OES 2008، Woods Hole، MA، ایالات متحده آمریکا، 13-14 اکتبر 2008. صص 1-10. [ Google Scholar ]
- بارکبی، اس. ویلیامز، اس بی؛ پیزارو، او. Jakuba، MV Bathymetric ذرات فیلتر SLAM با استفاده از نقشه مسیر. بین المللی ربات جی. Res. 2012 ، 31 ، 1409-1430. [ Google Scholar ] [ CrossRef ]
- بارکبی، اس. ویلیامز، اس بی؛ پیزارو، او. Jakuba، MV یک رویکرد بدون ویژگی برای SLAM عمق سنجی کارآمد با استفاده از نقشه برداری ذرات توزیع شده. ربات صحرایی جی. 2011 ، 28 ، 19-39. [ Google Scholar ] [ CrossRef ]
- بارکبی، اس. ویلیامز، اس. پیزارو، او. Jakuba، M. یک رویکرد کارآمد به SLAM عمق سنجی. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ 2009 در مورد ربات ها و سیستم های هوشمند، سنت لوئیس، MO، ایالات متحده، 11-15 اکتبر 2009. ص 219-224. [ Google Scholar ]
- رومن، سی. سینگ، اچ. عمق سنجی چند پرتوی مبتنی بر وسیله نقلیه با استفاده از نقشه های فرعی و SLAM بهبود یافته است. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ 2005 در مورد ربات ها و سیستم های هوشمند، ادمونتون، AB، کانادا، 2 تا 6 اوت 2005. صص 3662–3669. [ Google Scholar ]
- زنده دارا، س. ریدائو، پی. مالیوس، ا. Ribas، D. MBpIC-SLAM: تطبیق سطح احتمالی برای SLAM مبتنی بر عمق سنجی. IFAC Proc. جلد 2012 ، 45 ، 126-131. [ Google Scholar ] [ CrossRef ]
- رویز، فناوری اطلاعات؛ Raucourt, Sd; پتیلو، ی. Lane, DM نقشه برداری و محلی سازی همزمان با استفاده از سونار sidescan. IEEE J. Ocean. مهندس 2004 ، 29 ، 442-456. [ Google Scholar ] [ CrossRef ]
- Jaulin، L. رویکرد عضویت مجموعه غیرخطی برای مکان یابی و ساختن نقشه ربات های زیر آب. IEEE Trans. ربات. 2009 ، 25 ، 88-98. [ Google Scholar ] [ CrossRef ]
- ووک، پی. Frey, C. ناوبری AUV در اعماق دریا با استفاده از تصاویر سونار اسکن جانبی و SLAM. در مجموعه مقالات OCENS’10 IEEE SYDNEY، سیدنی، استرالیا، 24-27 مه 2010; صص 1-8. [ Google Scholar ]
- اولیناس، جی. لادو، ایکس. سالوی، جی. Petillot، YR بر اساس ویژگی با استفاده از اسکن جانبی اشیاء برجسته. In Proceedings of the OCENS 2010 MTS/IEEE Seattle, Seattle, WA, USA, 20-23 سپتامبر 2010; صص 1-8. [ Google Scholar ]
- والتر، ام. هاور، اف. Leonard, J. SLAM برای بازرسی بدنه کشتی با استفاده از فیلترهای اطلاعاتی توسعه یافته دقیقاً پراکنده. در مجموعه مقالات کنفرانس بین المللی IEEE 2008 در مورد رباتیک و اتوماسیون، پاسادنا، کالیفرنیا، ایالات متحده آمریکا، 19 تا 23 مه 2008. ص 1463-1470. [ Google Scholar ]
- شیپی، جی. جانسون، ام. Pihl، JNB تصحیح موقعیت با استفاده از پژواک از یک اصلاح ناوبری برای تصویربرداری سونار دیافراگم مصنوعی. IEEE J. Ocean. مهندس 2009 ، 34 ، 294-306. [ Google Scholar ] [ CrossRef ]
- نیومن، PM; لئونارد، جی جی. Rikoski، RJ به سمت SLAM زمان ثابت در یک وسیله نقلیه زیر آب خودمختار با استفاده از سونار دیافراگم مصنوعی. در مجموعه مقالات یازدهمین سمپوزیوم بین المللی تحقیقات رباتیک ; Springer: برلین/هایدلبرگ، آلمان، 2005; صص 409-420. [ Google Scholar ]
- ریباس، دی. ریدائو، پی. تاردوس، جی دی. Neira, J. زیر آب SLAM در محیط های ساخت یافته دست ساز. ربات صحرایی جی. 2008 ، 25 ، 898-921. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ریباس، دی. ریدائو، پی. نیرا، جی. Tardos، JD SLAM با استفاده از سونار تصویربرداری برای محیطهای زیر آب با ساختار جزئی. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ 2006 در مورد ربات ها و سیستم های هوشمند، پکن، چین، 9 تا 15 اکتبر 2006. ص 5040–5045. [ Google Scholar ]
- مالیوس، ا. ریدائو، پی. هرناندز، ای. ریباس، دی. مورلی، اف. Petillot، Y. SLAM مبتنی بر پوز با الگوریتم تطبیق اسکن احتمالی با استفاده از سونار تصویربرداری اسکن شده مکانیکی. In Proceedings of the OCENS 2009-EUROPE، برمن، آلمان، 11-14 مه 2009; صص 1-6. [ Google Scholar ]
- فریرا، اف. وروجو، جی. کاچیا، م. Bruzzone, G. موزاییک نوری مبتنی بر SLAM در زمان واقعی برای وسایل نقلیه زیر آب بدون سرنشین. هوشمند خدمت ربات. 2012 ، 5 ، 55-71. [ Google Scholar ] [ CrossRef ]
- بلسر، جی. Hendeby, G. استفاده از جریان نوری به عنوان جایگزین سبک وزن SLAM. در مجموعه مقالات هشتمین سمپوزیوم بین المللی IEEE در سال 2009 در مورد واقعیت ترکیبی و افزوده، اورلاندو، فلوریدا، ایالات متحده آمریکا، 19 تا 22 اکتبر 2009. صص 175-176. [ Google Scholar ]
- وانگ، پی. چن، سی. دونگ، سی. خو، اچ. تیان، اف. روش تحلیل حرکت دوربین فیلمبرداری بر اساس جریان نوری و اسلم. در مجموعه مقالات کنفرانس بین المللی پردازش صدا، زبان و تصویر 2016 (ICALIP)، شانگهای، چین، 11 تا 12 ژوئیه 2016؛ صص 62-66. [ Google Scholar ]
- آندرت، اف. امان، ن. کراوز، اس. لورنز، اس. براتانوف، دی. Mejias، L. ناوبری هواپیما با کمک نوری با استفاده از SLAM بصری جدا شده با افزایش سنسور برد. جی. اینتل. ربات. سیستم 2017 ، 88 ، 547-565. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- نیرا، جی. تاردوس، JD ارتباط داده ها در نقشه برداری تصادفی با استفاده از آزمون سازگاری مشترک. IEEE Trans. ربات. خودکار 2001 ، 17 ، 890-897. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دیویس، سی. ناوبری شبیه GPS در زیر زمین. در مجموعه مقالات نشست IEEE/ION Position, Location and Navigation Symposium, Indian Wells, CA, USA, 4-6 مه 2010. صص 1108-1111. [ Google Scholar ]
- شانموگاناتان، اس. مدل سازی شبکه عصبی مصنوعی: مقدمه. در مدلسازی شبکه عصبی مصنوعی ; Springer: برلین/هایدلبرگ، آلمان، 2016; صص 1-14. [ Google Scholar ]
- Masters, T. Practical Neural Network Recipes in C++ , 1st ed.; مطبوعات دانشگاهی: کمبریج، MA، ایالات متحده آمریکا، 1993; صص 1-493. [ Google Scholar ]
- بار، FR; Brereton، RG; Walsh، PT انتخاب اعتبار متقابل مجموعههای آزمایش و اعتبارسنجی در کالیبراسیون چند متغیره و شبکههای عصبی همانطور که در طیفسنجی اعمال میشود. تحلیلگر 1997 ، 122 ، 1015-1022. [ Google Scholar ] [ CrossRef ]
- Minns، AW; هال، MJ شبکه های عصبی مصنوعی به عنوان مدل های بارش-رواناب. هیدرول. علمی J. Sci. هیدرول. 1996 ، 41 ، 399-417. [ Google Scholar ] [ CrossRef ]
- White, H. یادگیری در شبکه های عصبی مصنوعی: دیدگاه آماری. محاسبات عصبی 1989 ، 1 ، 425-464. [ Google Scholar ] [ CrossRef ]
- پاریسی، ر. کلودیو، EDD؛ اورلاندی، جی. Rao, BD یک الگوی یادگیری تعمیم یافته که از ساختار شبکه های عصبی پیشخور استفاده می کند. IEEE Trans. شبکه عصبی 1996 ، 7 ، 1450-1460. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- عماری، س. موراتا، ن. مولر، ک. فینکه، ام. یانگ، HH تئوری آماری مجانبی بیش تمرینی و اعتبارسنجی متقابل. IEEE Trans. شبکه عصبی 1997 ، 8 ، 985-996. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- مایر، منابع انسانی؛ Dandy، GC شبکه های عصبی برای پیش بینی و پیش بینی متغیرهای منابع آب: بررسی مسائل و کاربردهای مدل سازی. محیط زیست مدل نرم افزار 2000 ، 15 ، 101-124. [ Google Scholar ] [ CrossRef ]
- بیبیس، جی. جورجیوپولوس، M. شبکه های عصبی پیشخور. پتانسیل های IEEE 1994 ، 13 ، 27-31. [ Google Scholar ] [ CrossRef ]
- Dissanayake، MWMG؛ نیومن، پی. کلارک، اس. دورانت-وایت، HF; Csorba، M. راه حلی برای مشکل مکان یابی و نقشه سازی همزمان (SLAM). IEEE Trans. ربات. خودکار 2001 ، 17 ، 229-241. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]


بدون دیدگاه