

خلاصه
استخراج ویژگی از یک منطقه شهری یکی از مهم ترین جهت های کاربرد رادار دیافراگم مصنوعی پلاریمتری (PolSAR) است. یک تصویر PolSAR با وضوح بالا دارای ویژگی های ابعاد بالا و غیر خطی است. بنابراین، برای یافتن ویژگیهای ذاتی برای تشخیص هدف، یک روش استخراج ناحیه ساختمانی برای تصاویر PolSAR بر اساس الگوریتم انتخاب محلههای تطبیقی حفظ محله (ANSNPE) پیشنهاد شدهاست. ابتدا، 52 ویژگی با استفاده از ماتریس هموقوع سطح خاکستری (GLCM) و پنج روش تجزیه قطبی استخراج میشوند. مجموعه ویژگی ها به 20 بعد، 36 بعد و 52 بعد تقسیم می شود. در مرحله بعد، الگوریتم ANSNPE بر روی نمونه های آموزشی اعمال می شود و ماتریس طرح ریزی برای تصویر آزمایشی به دست می آید تا ویژگی های جدید استخراج شود. در آخر، طبقهبندیکننده ماشین بردار پشتیبان (SVM) و پس پردازش برای استخراج منطقه ساختمان استفاده میشود و دقت ارزیابی میشود. آزمایشهای مقایسهای با استفاده از Radarsat-2 انجام میشوند و نتایج نشان میدهد که الگوریتم ANSNPE میتواند به طور موثر منطقه ساختمان را استخراج کند و توانایی تعمیم بهتری دارد. ماتریس طرح ریزی با استفاده از داده های آموزشی به دست می آید و می تواند به طور مستقیم در نمونه جدید اعمال شود و دقت استخراج منطقه ساختمان بالای 80٪ است. ترکیبی از ویژگیهای پلاریزاسیون و بافت، اطلاعات زیادی را ارائه میکند که برای استخراج مناطق ساختمانی مفیدتر است. و نتایج نشان می دهد که الگوریتم ANSNPE می تواند به طور موثر منطقه ساختمان را استخراج کند و توانایی تعمیم بهتری دارد. ماتریس طرح ریزی با استفاده از داده های آموزشی به دست می آید و می تواند به طور مستقیم در نمونه جدید اعمال شود و دقت استخراج منطقه ساختمان بالای 80٪ است. ترکیبی از ویژگیهای پلاریزاسیون و بافت، اطلاعات زیادی را ارائه میکند که برای استخراج مناطق ساختمانی مفیدتر است. و نتایج نشان می دهد که الگوریتم ANSNPE می تواند به طور موثر منطقه ساختمان را استخراج کند و توانایی تعمیم بهتری دارد. ماتریس طرح ریزی با استفاده از داده های آموزشی به دست می آید و می تواند به طور مستقیم در نمونه جدید اعمال شود و دقت استخراج منطقه ساختمان بالای 80٪ است. ترکیبی از ویژگیهای پلاریزاسیون و بافت، اطلاعات زیادی را ارائه میکند که برای استخراج مناطق ساختمانی مفیدتر است.
کلید واژه ها:
PolSAR ; یادگیری ماشینی ؛ ANSNPE _ SVM
1. معرفی
تشدید شهرنشینی و گسترش شهرها منعکس کننده تأثیر فعالیت های انسانی بر محیط طبیعی است. تحقیق در مورد کاربری زمین شهری با استفاده از سنجش از دور می تواند رابطه بین توسعه اقتصادی، فعالیت های انسانی و محیط طبیعی را منعکس کند [ 1 ]. ویژگی رادار دیافراگم مصنوعی (SAR) تشخیص در همه شرایط آب و هوایی، کمبودهای سنجش از دور نوری را جبران می کند [ 2 ]. SAR به ابزار مهمی برای استخراج اطلاعات سنجش از دور تبدیل شده است و نقشی ضروری در زمینه رصد زمین ایفا می کند. اطلاعات تصویر سنتی SAR با استفاده از تفاوت در شدت پس پراکندگی هدف استخراج می شود [ 3]، اما حل مشکل همان طیف مواد خارجی مشکل است. با بهبود وضوح تصویر SAR، اطلاعات دقیق تصویر واضح است و ویژگیهای بافت ناحیه ساختمان فراوانتر است و برای استخراج اطلاعات یک تصویر SAR با وضوح بالا اعمال میشود. Zhao، GAO و Kuang [ 4 ] از تابع تغییر برای محاسبه ویژگی های بافت تصاویر SAR استفاده کردند و روش طبقه بندی میانگین فازی نظارت نشده را برای استخراج مساحت ساختمان به کار بردند. طبق گفته ژو و همکاران، تصاویر ویژگی های بافت و تصاویر فیلتر به دست آمده با تبدیل موجک. [ 5]، به عنوان یک لایه ورودی شبکه عصبی BP (Back Propagation) استفاده می شود و طبقه بندی بافت تصاویر SAR با وضوح بالا تکمیل می شود. با این حال، در زمینه سنجش از دور راداری، یک صورت فلکی ماهوارهای رادار دیافراگم مصنوعی جدید (SAR) در سالهای اخیر با موفقیت پرتاب شده است. از آنجایی که دادههای SAR رشد انفجاری را نشان دادهاند، عصر دادههای بزرگ SAR شکوفا شده است. تصاویر رادار دیافراگم مصنوعی پلاریمتری با وضوح بالا (که به آن PolSAR می گویند) می توانند اطلاعات صحنه زمینی را از ابعاد مختلف به دست آورند، از یک سو اطلاعات غنی برای شناسایی ویژگی ها و از سوی دیگر برای افزایش پیچیدگی استخراج اطلاعات فراهم کنند. در زمینه داده های بزرگ،
استخراج ویژگی حیاتی ترین و مرکزی ترین بخش استخراج اطلاعات در تصاویر SAR است. مطالعه روش استخراج ویژگی برای تصاویر PolSAR با وضوح بالا، کاهش ابعاد فضا و حذف اطلاعات اضافی برای استخراج خودکار سریع و دقیق مناطق ساختمان بسیار مهم است. روشهای استخراج ویژگی سنتی بر اساس ویژگی فرضیه ساختار خطی جهانی یک مجموعه تصویر PolSAR پیشنهاد شدهاند. اگرچه آنها می توانند به هدف کاهش ابعاد دست یابند، ساختار ذاتی شرح داده های با ابعاد بالا استخراج ویژگی جدید SAR نمی تواند دقیق باشد و ممکن است بر دقت استخراج اطلاعات تأثیر بگذارد. ویژگی هدف تصاویر SAR عمدتاً شامل طول موج رادار، زاویه برخورد، قطبش، جهت مشاهده، زبری سطح زمین،6 ]. این عوامل مستقل از یکدیگر نیستند و رابطه بین تصاویر SAR غیرخطی است. بنابراین، الگوریتم استخراج ویژگی برای ساختار داده غیرخطی برای تصاویر SAR با وضوح بالا مناسب تر است.
در سالهای اخیر، یادگیری چندگانه به طور گسترده در تشخیص چهره، طبقهبندی متن و سایر زمینهها به عنوان روشی برای کاهش ابعاد غیرخطی در یادگیری ماشین و تشخیص الگو استفاده شده است [ 7 ، 8 ]]. یادگیری منیفولد فرض میکند که دادهها بر روی یک منیفولد بالقوه نمونهبرداری میشوند. هدف یافتن ساختار منیفولد کمبعدی است که در فضایی با ابعاد بالا تعبیه شده است. یک نمایش منیفولد کم بعدی کارآمد برای کاهش ابعاد پیشنهاد شده است. یادگیری چندگانه میتواند با دادههای فضایی با ابعاد بالا سر و کار داشته باشد و ساختار هندسی ذاتی دادهها را به طور موثر نشان دهد. بنابراین، استفاده از یادگیری منیفولد در تصاویر SAR قطبی میتواند دقت تشخیص هدف را بهبود بخشد. روش یادگیری منیفولد کلاسیک با استفاده از نگاشت ایزومتریک (ISOMAP) [ 9 ]، تعبیه خطی محلی محلی خطی (LLE) [ 10 ]، نقشههای خاص لاپلاسی (LE) [ 11 ]، و تراز فضای مماس محلی (LTSA) [ 12 ]] پیشنهاد می شود. پیشبینیهای محلی حفظ (LPP) [ 13 ] و جاسازی حفظ محلهها (NPE) [ 14 ] برای مشکل یادگیری خارج از نمونه یادگیری چندگانه کلاسیک پیشنهاد شدهاند. یادگیری منیفولد کاربردهای زیادی در تصویربرداری سنجش از دور دارد که با توجه به نوع تصویر به سه قسمت تقسیم می شود. در تصویر فراطیفی، کاربرد طبقه بندی تصویر است [ 15 ، 16 ، 17 ، 18 ]. در تصویر نوری، یادگیری چندگانه برای بهبود عملکرد بخشبندی معنایی استفاده میشود [ 19 ]. کاربرد یادگیری منیفولد در تصاویر SAR شامل ترکیب تصویر، بازیابی تصویر، تشخیص هدف و طبقه بندی تصویر می باشد.20 , 21 , 22 , 23 , 24 , 25 , 26 , 27 , 28 , 29 , 30 ]. ژانگ و همکاران تصویر نوری و راداری را با استفاده از ISOMAP، LLE و PCA برای طبقهبندی پوشش زمین شهری ترکیب کرد [ 20 ]. هو و همکاران یک الگوریتم همجوشی چندگانه از SAR ابرطیفی و پلاریمتریک بر اساس LPP [ 29 ] پیشنهاد کرد. چن یک بازخورد مرتبط جدید برای انتخاب یک نمونه و یادگیری چندگانه برای بازیابی تصویر مبتنی بر محتوا پیشنهاد کرد [ 23 ]. یادگیری منیفولد در پایگاه داده MSTAR برای شناسایی هدف تراشه اعمال می شود. در [ 25 ]، LE به ویژگی استخراج برای طبقه بندی تصویر اعمال می شود. در [ 30 ] و لی تینگ [ 31] کاربرد الگوریتم LPP در استخراج ناحیه ساختمان تصویر SAR مورد مطالعه قرار گرفت. نتایج تحقیق نشان می دهد که الگوریتم LPP و الگوریتم تانسور LPP می توانند به طور موثر مناطق ساختمان شهری را استخراج کنند. NPE یک روش خطی سازی LLE است که توسط He et al. [ 14 ]. NPE شباهت هایی با الگوریتم LPP دارد. یک هدف حفظ ساختار محلی منیفولد داده و دیگری بهینه سازی تابع هدف است. الگوریتم NPE به طور گسترده در تشخیص عیب و تشخیص عیب فرآیند شیمیایی یا وضعیت ماشین، تشخیص چهره و خوشه بندی چهره، نمایه سازی تصویر و طبقه بندی تصویر استفاده می شود [ 32 ,33 ، 34 ، 35 ، 36 ، 37 ، 38 ., 39 , 40 , 41 , 42 , 43 , 44 , 45 , 46 ]. بائو و همکاران NPE نظارت شده را برای استخراج ویژگی با استفاده از یک برچسب کلاس برای تعریف فاصله جدید برای یافتن k نزدیکترین همسایه ارائه کرد [ 43 ]. Watanabe K پیشنهاد کرد که یک واریانس در الگوریتم NPE مربوط به تعریف مسئله بهینه سازی [ 19 ]] است. به دلیل توزیع ناهموار داده ها، همسایگی نقطه نمونه تغییر می کند و الگوریتم NPE با مقدار k ثابت دارای محدودیت هایی خواهد بود.
برای حل مشکلات فوق، یک روش انتخاب همسایگی تطبیقی در الگوریتم NPE معرفی شده و یک روش استخراج ساختمان SAR، انتخاب محلههای تطبیقی، جاسازی حفظ محله (ANSNPE) پیشنهاد شده است. الگوریتم ANSNPE برای استخراج ویژگی SAR قطبی اعمال می شود، الگوریتم SVM برای طبقه بندی ویژگی های استخراج شده استفاده می شود و الگوریتم های استخراج مختلف با هم مقایسه می شوند [ 27 ، 47 ]. بخش 2 ویژگی های تصویر PolSAR را معرفی می کند. بخش 3 الگوریتم ANSNPE و چارچوب استخراج را ارائه می دهد. بخش 4 آزمایش ها و نتایج را نشان می دهد و بخش 5 نتیجه گیری و کار آینده را ارائه می دهد.
2. ویژگی های تصویر PolSAR
داده های PolSAR ویژگی های پلاریزاسیون هدف زمینی را توصیف می کند [ 48 ]. از ویژگی های غنی PolSAR می توان برای استخراج ساختمان استفاده کرد. در این مقاله ویژگیهای تصویر PolSAR به سه دسته تقسیم میشوند: یکی ویژگیهای مبتنی بر ویژگیهای پسپراکندگی تصویر اصلی، دیگری ویژگیهای بافت بر اساس روش آماری، و دسته آخر ویژگیهای مبتنی بر هدف پلاریمتری. تجزیه.
2.1. ویژگی های پس پراکندگی
در تصاویر رادار، شدت پژواک اشیاء منعکس کننده تغییر خاکستری اجسام است. ضریب پراکندگی عقب تصویر SAR اطلاعات مهمی برای پژواک رادار است. بنابراین، چهار ضریب پراکندگی پشت باند به عنوان اطلاعات خاکستری تصاویر SAR، نشان داده شده در جدول 1 استخراج می شوند.
2.2. ویژگی های بافت
با بهبود وضوح تصاویر SAR، اطلاعات مکانی و بافتی تصاویر SAR فراوان تر می شود. اطلاعات بافت اطلاعات مهم تصویر است و به طور گسترده در برنامه های سنجش از راه دور استفاده می شود. در این مقاله، ویژگی بافت با استفاده از روش آماری ماتریس هموقوع سطح خاکستری کلاسیک استخراج شده است. اصل این است که احتمال اینکه یک جفت پیکسل فاصله D را در یک جهت معین در یک پنجره خاص برآورده کند و سپس ماتریس همرویداد را ایجاد کند. Harakic و همکاران برای توصیف شهودی ویژگیهای بافت با استفاده از GLCM. [ 49 ] دو تجزیه و تحلیل آماری را بر اساس ماتریس همزمانی انجام داد و پارامترهای بافت معمولی در جدول 2 نشان داده شده است..
2.3. ویژگی های پلاریزاسیون
اطلاعات قطبش اطلاعات منحصر به فرد رادار دیافراگم مصنوعی است. تکنیک تجزیه هدف قطبی به آشکار کردن اطلاعات پراکندگی اهداف زمینی با استفاده از ماتریس پراکندگی کمک میکند و ویژگیهای قطبش را میتوان با استفاده از تئوری تجزیه هدف قطبی به دست آورد.
تجزیه قطبی به طور عمده به چهار دسته تقسیم می شود [ 50 ]: اولین روش تجزیه دو جزء بر اساس ماتریس K Kennaugh است (مانند Huynen، Holm و Barnes، Yang). روش دوم، روش تجزیه ماتریس کوواریانس C3 یا ماتریس منسجم T3 بر اساس مدل پراکندگی است (مانند فریمن و دوردن، یاماگوچی، دونگ). سوم، بردار ویژگی یا تجزیه و تحلیل مقادیر ویژگی بر اساس ماتریس کوواریانس C3 یا ماتریس منسجم T3 (مانند Cloude، Holm، vanZyl) است. و چهارمین روش تجزیه بر اساس ماتریس پراکندگی منسجم S (مانند کروگاگر، پوالی و غیره) است. در این مقاله، پنج الگوریتم تجزیه قطبی، همانطور که در جدول 3 نشان داده شده است، ارائه شده است. تجزیه فریمن-دردن بر اساس مدل فیزیکی پژواک پراکندگی رادار به سه ویژگی اساسی تجزیه میشود. تجزیه یاماگوچی قدرت سه نوع مکانیسم پراکندگی را نشان می دهد: پراکندگی بدن، پراکندگی سطحی و پراکندگی ثانویه. تجزیه ابر ویژگی های آنتروپی، زاویه پراکندگی متوسط و ناهمسانگردی را فراهم می کند. پائولی یک عامل تولید هدف را بر اساس تجزیه ماتریس T3 به دست می آورد. کروگاگر ماتریس پراکندگی S را به مجموع سه معنای فیزیکی خاص از اجزای منسجم مربوط به پراکندگی توپ، دو وجهی و مارپیچ تجزیه می کند.
3. الگوریتم ANSNPE و چارچوب استخراج
3.1. الگوریتم ANSNPE
الگوریتم جاسازی حفظ همسایگی (NPE) یک تقریب خطی از الگوریتم LLE با هدف حفظ ساختار چندگانه محلی داده ها است. فرض این است که در یک دامنه محلی، یک نقطه را می توان به صورت خطی با نقاط اطراف آن نشان داد. هدف این است که ضرایب وزنی نمایش خطی نقاط نمونه مجاور در فضای داده اصلی در فضای پیش بینی شده ثابت بماند [ 14 ]. با فرض اینکه یک نمونه آموزشی با یک مجموعه ویژگی با ابعاد بالا نمایش داده می شود ایکس=[ایکس1،…،ایکسn]∈ آرمتر×nm عدد مشخصه است که بعد فضا است و n عدد نمونه است. ویژگی ذاتی نمونه ساختار منیفولد کم بعدی است که در فضای ابعاد m تعبیه شده است. ویژگی کم بعدی خروجی به صورت نمایش داده می شود Y=[y1،…،yn]∈ آرد×n(د<متر). مراحل اصلی به شرح زیر است:
-
با یافتن k نزدیکترین همسایه نمونه X i ، بازسازی افین Xi توسط این نقاط همسایگی انجام می شود . برای به حداقل رساندن خطای بازسازی، تابع هدف بهینه شده به صورت معادله زیر طراحی شده است (1).
آرگمین”εمن”2=آrgمترمنn∑من”ایکسمن-∑مندبلیومنjایکسj”2∑jدبلیومنj=1،j=1،2،…،n -
محاسبه ماتریس وزن W با توجه به تابع هدف بهینه شده.
-
حل معادله مشخصه؛ بردارهای مشخصه مربوط به d کوچکترین مقادیر ویژه معادله ماتریس طرح ریزی A است ( آ∈آرد×متر)
-
ویژگی های جدید تصویر آموزشی با نگاشت ویژگی نمونه های آموزشی توسط ماتریس طرح ریزی به دست می آید.
در الگوریتم NPE، هر نقطه نمونه با بازسازی خطی نقطه همسایه k نشان داده میشود و سایر نقاط در k نزدیکترین نقطه همسایه را میتوان به صورت خطی با نقاط k -1 بازسازی کرد . اگر مقدار k به طور منطقی [ 51 ] انتخاب شود، خطای بازسازی خطی بسیار نزدیک خواهد بود. با این حال، اگر مقدار k معقول نباشد، خطای بازسازی خطی بزرگتر خواهد بود. در کاربردهای عملی، چگالی توزیع داده ها به طور کلی متفاوت است و تعداد نقاط همسایه مربوطه نیز باید تغییر کند [ 52 ]. در الگوریتم NPE، زمانی که مقدار ثابت k باشد ، به راحتی می توان یک خطای بازسازی بزرگ داشت.برای هر نقطه تنظیم شده است. بنابراین، با معرفی روش انتخاب محله تطبیقی، یک الگوریتم تعبیه حفظ محله انتخابی تطبیقی (ANSNPE) پیشنهاد شده است. الگوریتم در شکل 1 نشان داده شده است و مراحل اصلی به شرح زیر است:
-
پارامتر همسایه اولیه k ، پارامتر نقطه همسایه حداقل kmin ، پارامتر نقطه همسایه حداکثر k max ، و احتمال انتخاب رویداد کوچک p تنظیم شده است. یافتن k اولیه نزدیکترین همسایه نمونه های X i ( X i = [ x ij ], j = 1, …, k );
-
انتخاب نزدیکترین k به همسایگان به صورت تطبیقی. میانگین فاصله اقلیدسی D i و فاصله منیفولد D m نقطه نمونه Xi برای به دست آوردن پارامتر k i نمونه X i توسط D i و D m محاسبه می شود (به عنوان مثال، معادلات (2)-(4)). اگر k i < k , به این معنی است که D i بزرگتر است و داده همسایه X i پراکنده است. سپس، لازم است که بزرگتر (1 – p) ( k − k i ) [ 53 ] فاصله اقلیدسی در مجموعه داده. اگر k i > k ، به این معنی است که D i کوچکتر است و داده ها متراکم تر هستند. در همان زمان، X i را به عنوان دادههای همسایگی حفظ میکند، و بقیه (1 – p )( k – k i ) از فاصله اقلیدسی نقاط کوچکتر برای پیوستن به همسایگی X i انتخاب میشوند .
-
همسایه نهایی X i را بدست آورید و ماتریس وزن W را با توجه به تابع هدف بهینه شده محاسبه کنید.
-
حل معادله مشخصه؛ بردارهای مشخصه مربوط به d کوچکترین مقادیر ویژه معادله ماتریس طرح ریزی A است ( آ∈آرد×متر) و
-
ویژگی های جدید تصویر آموزشی با استفاده از نگاشت ویژگی نمونه های آموزشی توسط ماتریس طرح ریزی به دست می آید.
Dمن=∑j=1کایکسمن-ایکسمنjک،من=1،2،…،nDمتر=∑من=1nDمنnکمن=ک×DمترDمن
3.2. چارچوب استخراج
سه دسته ویژگی و ترکیب آنها را می توان به صورت سه مجموعه ویژگی نوشت که عبارتند از F 1 = { f i } i =1,…,20 , F 2 = { f i } i =1,…,36 , F 3 = { f i } i =1,…,52 و این روش در شکل 2 نشان داده شده است. ANSNPE برای استخراج ویژگی های جدید به سه مجموعه ویژگی اعمال می شود. سپس، ویژگی های جدید به عنوان ورودی طبقه بندی SVM برای به دست آوردن نتایج اولیه استخراج منطقه ساخت و ساز هستند. در نهایت، منطقه ساخت و ساز استخراج شده نهایی با پردازش پس از نتایج اولیه به دست می آید.
4. آزمایش ها و نتایج
در این بخش، چهار آزمایش وجود دارد. یکی این است که ما در مورد انتخاب پارامتر d با استفاده از d مختلف بحث می کنیمبرای به دست آوردن دقت استخراج در آزمایش دوم استخراج ساختمان، روش پیشنهادی با روش کاهش ابعاد اصلی NPE، با تحلیل مؤلفه اصلی کاهش ابعاد خطی (PCA) و بدون کاهش ابعاد مقایسه شده است. برای سه مجموعه داده، چهار رویکرد اعمال می شود. دقت کلی (OA) برای ارزیابی عملکرد روش های مختلف استفاده می شود. در آزمایش سوم، تجزیه و تحلیل کاربردی ANSNPE را مورد بحث قرار می دهیم که تأثیر انتخاب نمونه های آموزشی است. در آخرین آزمایش، دادههای GF3 را به عنوان دادههای آزمایش انتخاب میکنیم تا کاربرد روش پیشنهادی را برای منابع دادههای مختلف نشان دهیم.
4.1. داده ها
تصاویر RADARSAT-2 و GF3 از سوژو از زیرمجموعه ای از داده های باند C، PolSAR که در سال 2017 به دست آمد به دست آمده است. اطلاعات دقیق RADARSAT و GF3 در جدول 4 فهرست شده است. شکل 3 a تصویر دامنه RADARSAT-2 را نشان می دهد، شکل 3 b تصویر مربوط به Google Earth را نشان می دهد. اندازه تصویر 800 × 800 است.
4.2. بحث در مورد پارامتر d
برآورد ابعاد ذاتی یک مشکل است. هیچ رویکردی برای تایید آن وجود ندارد (تو و همکاران، 2010). در این مقاله پارامتر d از طریق آزمایش تعیین می شود. شکل 3 دقت استخراج را تحت انتخاب های مختلف d نشان می دهد . در شکل 4 ، آبی به نرخ تشخیص (DR)، قرمز به دقت کلی (OA)، و نارنجی به نرخ هشدار نادرست (FAR) اشاره دارد. محدوده d برای F1 و F2 از 2 تا 20 و برای F3 از 2 تا 20 است. همانطور که در شکل 3 نشان داده شده است ، برای مجموعه داده F1، OA زمانی بهترین عملکرد را دارد که d در مقدار 2 تا 7 باشد. FAR از زمان d پایدار می ماند.4 است. علاوه بر این، زمانی که d بالاتر باشد ، زمان پردازش طولانی تر است. در نتیجه، پارامتر d برای F1 به عنوان 4 تنظیم می شود. برای مجموعه داده F2، d در مقدار 4 بهترین عملکرد را دارد. برای مجموعه داده F3، d در مقدار 8 بهترین عملکرد را دارد. بنابراین، d در آزمایشها برای F1، F2 و F3 به ترتیب 4، 4 و 8 است.
4.3. آزمایشات استخراج ساختمان
در این بخش از تصویر RADARSAT-2 برای ارزیابی الگوریتم پیشنهادی استفاده شده است. در مجموع 6400 نمونه آموزشی از زیر مجموعه RADARSAT-2 برای استخراج ویژگی ها و به دست آوردن ماتریس پروژه انتخاب شده است. برای آزمایشهای مقایسهای، سایر روشهای استخراجشده از همان نمونههای آموزشی استفاده میکنند. برای الگوریتم ANSNPE، پارامتر k به صورت 15 تنظیم می شود، که در آن kmin 1، k max 30 و p 0.3 است. شکل 5 ، شکل 6 و شکل 7 ، نتایج استخراج شده از تمامی روش ها را نشان می دهد. نتایج استخراج با مقادیر واقعی به دست آمده از تفسیر بصری تصاویر نوری مقایسه می شود. جدول 5نرخ تشخیص اولیه (IDR)، دقت کلی اولیه (IOA)، نرخ تشخیص نهایی (DR) و دقت کلی (OA) نتایج استخراج شده را می دهد.
DR و OA F1+ANSNPE+SVM 95.23% و 78.09% و F1+SVM 100% و 46.59% است. DR و OA F2+ANSNPE+SVM 88.78% و 81.88% و F2+SVM 99.07% و 77.75% است. DR و OA F3+ANSNPE+SVM 96.42% و 80.89% و F3+SVM 99.17% و 77.76% است. بهترین نتایج به صورت پررنگ در جدول 5 آمده است. این نشان میدهد که دقت استخراج منطقه ساختمان توسط الگوریتم ANSNPE بیشتر از منطقه ساختمان است که مستقیماً توسط ویژگیهای اصلی استخراج میشود.
برای مجموعه داده F1، عملکرد استخراج مساحت ساختمان توسط الگوریتم ANSNPE بسیار بهتر از یکی از الگوریتمهای دیگر است. مساحت ساختمان توسط الگوریتم NPE استخراج نمی شود. دو الگوریتم دیگر حدود 40 درصد از مساحت ساختمان را استخراج کردند که مساحت آب است. این نشان می دهد که سه الگوریتم قادر به یافتن و حفظ ساختار الگوی ذاتی تصویر SAR نیستند. در آزمایش در مجموعه داده F2، نتیجه ANSNPE بهتر است. مساحت ساختمان بیشتر، به خصوص مساحت کم ساختمان، توسط الگوریتم NPE و PCA استخراج نمی شود. برای مجموعه داده F3، همان پدیده ظاهر می شود. OA SVM که فاقد ویژگی استخراج است، بالاتر از NPE و PCA است، با این حال، کمتر از الگوریتم ANSNPE پیشنهادی است.
4.4. تجزیه و تحلیل کاربردی
به دلیل تعمیم الگوریتم ANSNPE، انتخاب نمونههای آموزشی ممکن است تحت تأثیر نتایج نمونههای آزمایشی با ایجاد ویژگیهایی باشد که نمیتوانند منطقه ساختمان را متمایز کنند. بنابراین، بسته به نوع اشیاء زمینی، پنج نمونه آموزشی با ترکیب های مختلف از مناطق ساختمان، پوشش گیاهی و آب برای مطالعه در شکل 6 انتخاب شده است. ماتریس پروژه بر روی تصویر آزمایشی اعمال می شود و نتایج در شکل 7 و جدول 6 نشان داده شده است.. بهترین نتایج به صورت پررنگ هستند. میانگین دقت F1+ANSNPE+SVM 71.42% و انحراف استاندارد 12.41 است. میانگین دقت F2+ANSNPE+SVM 78.82% و انحراف استاندارد 5.11 است. و میانگین دقت F3+ANSNPE+SVM 78.05% و انحراف استاندارد 2.67 است.
تفاوت هایی بین OA F1+ANSNPE+SVM، F2+ANSNPE+SVM و F3+ANSNPE+SVM مشاهده شده است. OA از F1 کمتر است و دلیل این نتیجه این است که مقداری آب به صورت نادرست به عنوان منطقه ساختمان تشخیص داده می شود. F2 و F3 OA نزدیک داشتند، اما DR F3 بیش از 95٪ و 8٪ بیشتر از F2 است. برخی از مناطق ساختمان در F2 شناسایی نمی شوند. مناطق ساختمانی شناسایی نشده عمدتاً در جایی متمرکز می شوند که ساختمان ها نسبتاً کم هستند و ویژگی های بافت آشکار نیستند. در سه آزمایش، خطا عمدتاً ناشی از ناحیه ساخت و ساز جاده است زیرا تأثیر جابجایی بالای ساختمانهای مرتفع باعث میشود روشنایی به جاده گسترش یابد و سپس طبقهبندیکننده به اشتباه جاده را به عنوان منطقه ساختمان شناسایی میکند.
در تجزیه و تحلیل کاربردی، نمونه های آموزشی متفاوتی بر روی تصویر آزمایشی اعمال می شود و دقت استخراج مساحت ساختمان متفاوت است. میانگین OA F1 کمتر است و بسیار نوسان دارد. تنها مجموعه ویژگی های متشکل از ویژگی های پلاریزاسیون برای استخراج مساحت ساختمان برای به دست آوردن دقت کم استفاده می شود و اطلاعات ارائه شده کافی نیست. در آزمایشات F2، زمانی که نمونه آموزشی قطار 1 باشد، OA کمترین میزان است. در نتیجه، ساختمان در قطار 1 پایین است و ویژگی بافت مشخص نیست. ماتریس پروجکشن استخراجشده به مجموعه ویژگیهای با ابعاد بالا متشکل از ویژگیهای بافت اعمال میشود که نمیتوان از آن برای استخراج ویژگیهای خوب برای منطقه ساختمان استفاده کرد. با این حال، میانگین OA F3 تفاوت زیادی با F2 ندارد و مقدار نوسان کمتر است.
4.5. داده های GF3
روش پیشنهادی بر روی داده های GF3 اعمال می شود. شکل 8 تصویر پس پراکندگی GF3 را نشان می دهد. شکل 9 و جدول 7 نتایج استخراج شده را نشان می دهد. در شکل 8 ، F3 عملکرد بهتری نسبت به F1 و F2 دارد. همانطور که از جدول 7 مشاهده می شود ، بالاترین OA بدست آمده با روش پیشنهادی با F3 و F1 88.32 درصد است. بالاترین DR 74.14 درصد است که به ترتیب حدود 4 درصد و 8 درصد بیشتر از F1 و F2 است.
همانطور که در شکل 8 نشان داده شده است ، جابجایی بالای ساختمان در تصاویر پلاریزاسیون افقی و عمودی اتفاق می افتد که بر نتایج F1 تأثیر می گذارد. محدوده غیر ساختمانی به عنوان متراژ ساختمان استخراج می شود. با این حال، مناطق ساختمانی استخراج شده کاذب در نتایج F2 در همان مکان وجود ندارد. علاوه بر این، F3 می تواند منطقه ساختمان را استخراج کند که با F1 و F2 از دست رفته است. برای GF3، تمام ویژگیها، از جمله ویژگی پلاریزاسیون و ویژگی بافت، برای استخراج مساحت ساختمان بهتر انتخاب میشوند.
5. نتیجه گیری ها
تصاویر PolSAR دارای ویژگی های ابعاد بالا و غیرخطی بودن هستند. جاسازی داده های SAR با ابعاد بالا در فضای با ابعاد بالا و توصیف ساختار هندسی ذاتی داده های SAR می تواند دقت استخراج اطلاعات SAR را بهبود بخشد. بنابراین، مطالعه روش استخراج مساحت ساختمان از تصاویر PolSAR با وضوح بالا از ارزش نظری و عملی مهمی برخوردار است. این مقاله اصل الگوریتم NPE را تجزیه و تحلیل کرده و یک روش استخراج مساحت ساختمان را با استفاده از تصاویر PolSAR با وضوح بالا بر اساس الگوریتم ANSNPE پیشنهاد میکند. ابتدا، ما از ماتریس مهندسی خاکستری و روشهای مختلف تجزیه پلاریزاسیون برای تشکیل مجموعهای با ابعاد بالا، به ترتیب شامل 20، 36 و 52 استفاده کردیم. سپس، با استفاده از الگوریتم ANSNPE، یک ماتریس طرح ریزی کم بعدی به دست می آید. و ویژگی های ابعادی بالا کاهش می یابد. در نهایت، از روش طبقهبندی SVM برای استخراج مساحت ساختمان و نرخ تشخیص استفاده میشود و دقت کلی محاسبه میشود. از طریق یک آزمایش کنتراست، مشخص شد که دقت استخراج مساحت ساختمان بر اساس الگوریتم ANSNPE بیش از 80٪ است که بالاتر از آن است که هنگام استفاده از استخراج ویژگی با ابعاد بالا اصلی به دست آمده است. از طریق تجزیه و تحلیل کاربردی، مشخص شد که نمونههای آموزشی مختلف بر دقت استخراج منطقه ساختمان تأثیر میگذارند و ویژگیهای تجزیه قطبی اطلاعات غنی، مکمل ویژگیهای بافت، و میتوانند ویژگیهایی را استخراج کنند که برای استخراج مناطق ساختمانی مفید هستند. آزمایشها روی دادههای GF3 تأیید میکنند که روش پیشنهادی نیز قابل اجرا است و بهتر است هنگام ساخت یک استخراج منطقه با GF3، همه ویژگیها انتخاب شوند. با این حال، برخی از مناطق ساختمانی استخراج نشده وجود دارد. گام بعدی مطالعه چگونگی کاهش دقت استخراج خطا با توجه به کاربرد الگوریتم ANSNPE بهتر در ناحیه بزرگتر خواهد بود. علاوه بر این، هدف ما استخراج ساختمان ها با دقت و سرعت بیشتر است.
منابع
- Xu, J. تشخیص تغییر شهری از تصاویر PolSAR منتقل شده در فضا با اصلاحات رادیومتری. دکتری پایان نامه، دانشگاه ووهان، ووهان، چین، 2015. [ Google Scholar ]
- Luo, D. ادغام تصاویر SAR نوری و پلاریمتری با وضوح فضایی بالا برای طبقه بندی پوشش زمین شهری. پایان نامه کارشناسی ارشد، دانشگاه چونگ کینگ جیائوتنگ، چونگ کینگ، چین، 2015. [ Google Scholar ]
- قهوهای مایل به زرد، QL; Shao, Y. مطالعه ای در مورد توسعه فناوری طبقه بندی جدید برای تصاویر سنجش از دور رادار. سنسور از راه دور. 2001 ، 49 ، 1-7. [ Google Scholar ] [ CrossRef ]
- ژائو، ال جی؛ گائو، جی. Kuang، GY Variogram-based Build-up Areas Extraction از تصاویر SAR با وضوح بالا. فرآیند سیگنال 2009 ، 25 ، 1433-1442. [ Google Scholar ] [ CrossRef ]
- زو، جی اچ. Guo، HD؛ فن، XT; Zhu، BQ کاربرد روش بافت موجک در طبقه بندی تصاویر سار تک باند، تک قطبی و با وضوح بالا. سنسور از راه دور. 2005 ، 64 ، 36-39. [ Google Scholar ] [ CrossRef ]
- ژائو، ال جی؛ Qin، YL; گائو، جی. Kuang، GY تشخیص مناطق ساخته شده از تصاویر SAR با وضوح بالا با استفاده از تجزیه و تحلیل بافت GLCM. J. Remote Sens. 2009 ، 13 ، 483-490. [ Google Scholar ] [ CrossRef ]
- شانگ، تی تی. جیا، YC; ون، ی. Sun، H. کاهش ابعاد پلاریمتری مبتنی بر نقشه های ویژه لاپلاسین برای طبقه بندی تصویر SAR. IEEE Trans. Geosci. Remote Sens. 2012 ، 50 ، 170-178. [ Google Scholar ] [ CrossRef ]
- هوانگ، Q. لیو، اچ. مروری بر روشهای کاهش ابعاد غیرخطی در یادگیری چندگانه. Appl. Res. محاسبه کنید. 2007 ، 24 ، 19-25. [ Google Scholar ] [ CrossRef ]
- تننباوم، جی بی. سیلوا، وی. لانگفورد، JC چارچوب هندسی جهانی برای کاهش ابعاد غیرخطی. Science 2000 , 290 , 2319-2323. [ Google Scholar ] [ CrossRef ]
- Roweis، ST; Saul, LK کاهش ابعاد غیرخطی با تعبیه خطی محلی. Science 2000 , 290 , 2323-2326. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- بلکین، ام. Niyogi، P. Laplacian eigenmaps برای کاهش ابعاد و نمایش داده ها. محاسبات عصبی 2003 ، 15 ، 1373-1396. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژانگ، ز. Zha، منیفولدهای اصلی HY و کاهش ابعاد غیرخطی از طریق تراز فضای مماس محلی.SIAM. J. Sci. محاسبه کنید. 2005 ، 26 ، 313-338. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- او، X. نیوگی، ص. پیش بینی های حفظ محل. عصبی Inf. روند. سیستم 2004 ، 16 ، 153-160. [ Google Scholar ]
- او، X. کای، دی. یان، اس. ژانگ، HJ محله حفظ تعبیه. در مجموعه مقالات دهمین کنفرانس بین المللی IEEE در بینایی کامپیوتر، پکن، چین، 17-20 اکتبر 2005. جلد 2، ص 1208–1213. [ Google Scholar ]
- Xia، JS; بومبرون، ال. برتومیو، ی. ژرمن، سی. یادگیری چندین ویژگی از طریق استراتژی چرخش. در مجموعه مقالات کنفرانس بین المللی پردازش تصویر (ICIP)، فینیکس، AZ، ایالات متحده آمریکا، 25 تا 28 سپتامبر 2016. [ Google Scholar ] [ CrossRef ]
- چانگ، CS; چن، KC; Kuo، BC; وانگ، ام اس؛ Li، CH تجزیه و تحلیل تفکیک محلی نیمه نظارت شده با نزدیکترین همسایگان برای طبقه بندی تصویر ابرطیفی. در مجموعه مقالات سمپوزیوم علوم زمین و سنجش از دور، شهر کبک، QC، کانادا، 13 تا 18 ژوئن 2014. [ Google Scholar ] [ CrossRef ]
- Xia، JS; چانوسوت، جی. Du، PJ; او، X. طبقهبندی طیفی – فضایی برای دادههای ابرطیفی با استفاده از جنگلهای چرخشی با استخراج ویژگیهای محلی و میدانهای تصادفی مارکوف. IEEE Trans. Geosci. Remote Sens. 2015 , 53 , 2532–2546. [ Google Scholar ] [ CrossRef ]
- لیائو، WZ؛ پیزوریکا، ا. فیلیپس، دبلیو. Pi، Y. استخراج ویژگی برای تصاویر فراطیفی بر اساس تجزیه و تحلیل تشخیص محلی نیمه نظارت شده. در مجموعه مقالات رویداد سنجش از دور شهری 2011، مونیخ، آلمان، 11 تا 13 آوریل 2011. [ Google Scholar ] [ CrossRef ]
- واتانابه، ک. تبدیل ویژگی حفظ انسجام برای تقسیم بندی معنایی. در مجموعه مقالات کنفرانس بین المللی IEEE 2018 در مورد سیستم ها، انسان و سایبرنتیک (SMC)، میازاکی، ژاپن، 7 تا 10 اکتبر 2018؛ صص 1368–1373. [ Google Scholar ] [ CrossRef ]
- ژانگ، اچ اس. لی، جی. وانگ، تی. لین، اچ. ژنگ، ز. لی، ی. Lu, Y. رویکرد یادگیری چندگانه برای طبقهبندی پوشش زمین شهری با دادههای نوری رادار. Landsc. طرح شهری. 2018 ، 172 ، 11-24. [ Google Scholar ] [ CrossRef ]
- لو، جی. جین، تی. Zhou، ZM استخراج ویژگی برای تشخیص مین در uwb sar از طریق swd و isomap. Prog. الکترومغناطیس. Res. 2013 ، 138 ، 157-171. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لی، بی. گونگ، جی بی. Tian، JW انتخاب منطقه تطبیق در ناوبری به کمک تطبیق صحنه sar بر اساس یادگیری چندگانه. در مجموعه مقالات هفتمین سمپوزیوم بین المللی در مورد پردازش تصویر چندطیفی و تشخیص الگو (MIPPR2011)، گویلین، چین، 4 تا 6 نوامبر 2011. [ Google Scholar ] [ CrossRef ]
- چن، بی. کائو، YF; Sun، H. روش بازخورد ربط مبتنی بر یادگیری چندگانه و انتخاب نمونه فعال برای بازیابی تصویر رادار دیافراگم مصنوعی. IET Radar Sonar Navig. 2011 ، 5 ، 118-127. [ Google Scholar ] [ CrossRef ]
- شی، ال. ژانگ، LF; یانگ، جی. ژانگ، ال. لی، پی. تعبیه گراف نظارت شده برای طبقهبندی تصویر SAR قطبی. IEEE Geosci. سنسور از راه دور Lett. 2013 ، 10 ، 216-220. [ Google Scholar ] [ CrossRef ]
- دونگ، جی جی؛ Kuang، GY شناسایی هدف در تصاویر sar از طریق طبقه بندی بر روی منیفولدهای ریمانی. IEEE Geosci. سنسور از راه دور Lett. 2015 ، 12 ، 199-203. [ Google Scholar ] [ CrossRef ]
- شی، ال. ژانگ، LF; ژائو، LL; ژانگ، ال. لی، پی. وو، دی. کاهش ابعاد مبتنی بر نقشه ویژه لاپلاسی تطبیقی برای تبعیض هدف اقیانوس. IEEE Geosci. سنسور از راه دور Lett. 2016 ، 13 ، 902-906. [ Google Scholar ] [ CrossRef ]
- کائو، اچ. ژانگ، اچ. وانگ، سی. تعبیه خطی محلی برای طبقهبندی تصویر sar پلاریمتری تحت نظارت. در مجموعه مقالات سمپوزیوم بین المللی علوم زمین و سنجش از دور IEEE 2016 (IGARSS)، فورت ورث، تگزاس، ایالات متحده آمریکا، 10 تا 15 ژوئیه 2016؛ صص 7561–7564. [ Google Scholar ] [ CrossRef ]
- یو، م. ژانگ، اس کیو. دونگ، تشخیص هدف GG در تصویر sar بر اساس طرحریزی متمایز محل قوی. IET Radar Sonar Navig. 2018 ، 12 ، 1285-1293. [ Google Scholar ] [ CrossRef ]
- هو، جی ال. هنگ، دی اف. وانگ، YY بررسی مقایسه ای تکنیک های یادگیری چندگانه برای همجوشی تصویر sar ابرطیفی و قطبی. Remote Sens. 2019 , 11 , 681. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وانگ، اچ جی. هان، جی اچ. طبقهبندی تصویر دنگ، YY Polsar بر اساس نقشههای ویژه لاپلاس و سوپرپیکسلها. Eurasip J. Wirel. اشتراک. شبکه 2017 ، 2017 ، 198. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- وانگ، جی. Sun، LZ تحقیق در مورد یادگیری منیفولد نظارت شده برای طبقه بندی هدف sar. در مجموعه مقالات CIMSA 2009 — کنفرانس بین المللی هوش محاسباتی برای سیستم ها و برنامه های اندازه گیری، هنگ کنگ، چین، 11 تا 13 مه 2009. [ Google Scholar ] [ CrossRef ]
- روش تحقیق Li, T. شناسایی مناطق ساختمانی شهری از تصاویر SAR با وضوح بالا بر اساس یادگیری منیفولد. پایان نامه کارشناسی ارشد، دانشگاه آکادمی علوم چین، پکن، چین، 2015. [ Google Scholar ]
- میائو، AM؛ جنرال الکتریک، ZQ؛ آهنگ، ZH; Shen, F. ساختار غیر محلی مدل تعبیه حفظ محله محدود و کاربرد آن برای تشخیص خطا. شیمی. هوشمند آزمایشگاه. سیستم 2015 ، 142 ، 184-196. [ Google Scholar ] [ CrossRef ]
- میائو، AM؛ لی، پی. بله، L. رگرسیون مبتنی بر تعبیه رگرسیون حفظ محله و کاربردهای آن در مدلسازی حسگر نرم. شیمی. هوشمند آزمایشگاه. سیستم 2015 ، 147 ، 86-94. [ Google Scholar ] [ CrossRef ]
- میائو، اس. وانگ، جی. گائو، QX؛ چن، اف. Wang, Y. تعبیه ساختار متمایز برای تشخیص تصویر. محاسبات عصبی 2016 ، 174 ، 850-857. [ Google Scholar ] [ CrossRef ]
- چن، ال. لی، وای جی; Li، HB تشخیص حالت چهره بر اساس تصویر اقلیدسی با نظارت بر فاصله همسایگی با حفظ جاسازی. در مجموعه مقالات سمپوزیوم بینالمللی فناوری و کاربرد اپتوالکترونیک 2014: پردازش تصویر و تشخیص الگو، پکن، چین، 13 تا 15 مه 2014. [ Google Scholar ] [ CrossRef ]
- ژانگ، SH; Li، WH تشخیص شرایط و ارزیابی تخریب تحت شرایط مختلف در حال اجرا با استفاده از NPE و SOM. انتشارات هنداوی Corp. Math. مشکل مهندس 2014 ، 781583. [ Google Scholar ] [ CrossRef ]
- پانگ، ام. جیانگ، جی اف. لین، سی. وانگ، بی. همسایگی متمایز دو بعدی با حفظ تعبیه در تشخیص چهره. در مجموعه مقالات ششمین کنفرانس بین المللی گرافیک و پردازش تصویر، پکن، چین، 24 تا 26 اکتبر 2014. [ Google Scholar ] [ CrossRef ]
- لیو، XM; یین، جی دبلیو. فنگ، ZL؛ دونگ، ال. وانگ، L. محله متعامد حفظ تعبیه برای تشخیص چهره. در مجموعه مقالات کنفرانس بین المللی IEEE 2007 در مورد پردازش تصویر، سن آنتونیو، تگزاس، ایالات متحده آمریکا، 16-19 سپتامبر 2007. صفحات 1522-4880. [ Google Scholar ] [ CrossRef ]
- وانگ، ن. Li، X. خوشهبندی چهره با استفاده از جاسازی همسایگی نیمه نظارت شده با محدودیتهای زوجی. در مجموعه مقالات چهارمین کنفرانس IEEE در سال 2009 در مورد الکترونیک صنعتی و کاربرد، شیان، چین، 25-27 می 2009. صص 2156-2318. [ Google Scholar ] [ CrossRef ]
- تائو، ایکس. دونگ، اس اف. ژائو، QX; Han, Z. Kernel Neighborhood Preserving Embedding و تجزیه و تحلیل ذات آن. در مجموعه مقالات کنگره جهانی سیستم های هوشمند WRI 2009، Xiamen، چین، 19-21 مه 2009. صص 2155–6083. [ Google Scholar ] [ CrossRef ]
- لای، زی. پیش بینی های متمایز محلی پراکنده برای استخراج و طبقه بندی دانش متمایز. محاسبات IET. Vis. 2012 ، 6 ، 551-559. [ Google Scholar ] [ CrossRef ]
- BAO، X. ژانگ، ال. وانگ، بی جی؛ یانگ، جی. تعبیه حفظ محله تحت نظارت برای تشخیص چهره. در مجموعه مقالات کنفرانس مشترک بین المللی شبکه های عصبی (IJCNN)، پکن چین، 6 تا 11 ژوئیه 2014. [ Google Scholar ] [ CrossRef ]
- Wen, JH; Yan، WD; Lin, W. استخراج ویژگی های یادگیری منیفولد خطی نظارت شده برای طبقه بندی تصویر فراطیفی. در مجموعه مقالات سمپوزیوم علوم زمین و سنجش از دور، شهر کبک، QC، کانادا، 13 تا 18 ژوئیه 2014. [ Google Scholar ] [ CrossRef ]
- یوان، XF; جنرال الکتریک، ZQ؛ بله، LJ; Song، Z. نظارت بر جاسازی حفظ محله برای استخراج ویژگی و کاربرد آن برای مدلسازی حسگر نرم. جی. کیموم. 2016 ، 30 ، 430-441. [ Google Scholar ] [ CrossRef ]
- ران، RS; نیش، بی. Wu، XG Exponential Neighborhood Preserving Embedding برای تشخیص چهره. IEICE Trans. Inf. سیستم 2018 ، 101 ، 1410-1420. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مهتا، س. ژان، BS; Shen, XJ Weighted Neighborhood Preserving Ensemble Embedding. Electronics 2019 , 8 , 219. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وانگ، XY; کائو، ZJ; Cui، ZY؛ لیو، ن. Pi، Y. طبقه بندی تصویر PolSAR بر اساس ویژگی قطبی عمیق و اطلاعات زمینه. J. Appl. Remote Sens. 2019 ، 2019 ، 13. [ Google Scholar ] [ CrossRef ]
- هارکک، آر.ام. شانموگام، ک. ویژگی های بافتی Dinstein، IH برای طبقه بندی تصویر. ترانس. سیستم مرد سایبرن. 1973 ، 3 ، 610-621. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- جونگ سن، ال. اریک، پی. تصویربرداری رادار قطبی: از مبانی تا کاربردها . انتشارات خانه صنعت الکترونیک: پکن، چین، 2013; صص 134-168. شابک 978-7-121-20266-7. [ Google Scholar ]
- هوی، KH; Xiao، BH; وانگ، پارامتر CH خود تنظیمی همسایگی برای جاسازی خطی محلی. تشخیص الگو آرتیف. هوشمند 2010 ، 23 ، 842-846. [ Google Scholar ] [ CrossRef ]
- هوانگ، LZ; ژنگ، LX؛ چن، سی. حداقل، L. الگوریتم جاسازی خطی محلی با همسایگان تطبیقی. در مجموعه مقالات کارگاه بین المللی سیستم های هوشمند و برنامه های کاربردی، ووهان، چین، 23-24 مه 2009. صص 1-4. [ Google Scholar ] [ CrossRef ]
- ژانگ، ی.ال. ژوانگ، جی. وانگ، ن. وانگ، SA ترکیب الگوریتم جاسازی خطی محلی تطبیقی و خوشهبندی طیفی با کاربرد در تشخیص خطا. J. Xi’an Jiaotong Univ. 2010 ، 44 ، 77-82. [ Google Scholar ] [ CrossRef ]
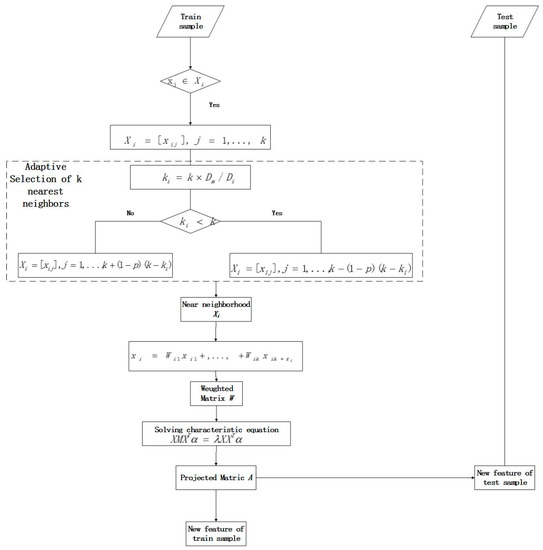
شکل 1. فلوچارت الگوریتم انتخاب محلههای تطبیقی، جاسازی حفظ همسایگی (ANSNPE).
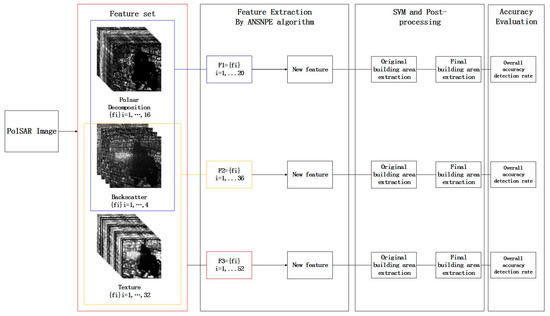
شکل 2. چارچوب استخراج.
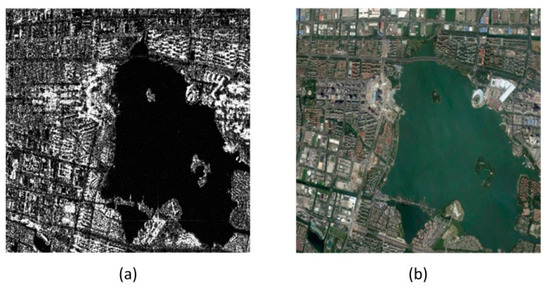
شکل 3. ( الف ) RADARSAT-2 و ( ب ) تصویر مربوط به Google Earth.
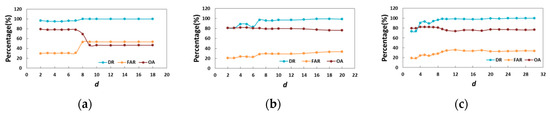
شکل 4. بحث از آزمایش d ، ( a ) نتیجه مجموعه داده F1 است، ( b ) مجموعه داده F2 است، ( c ) مجموعه داده F3 است.
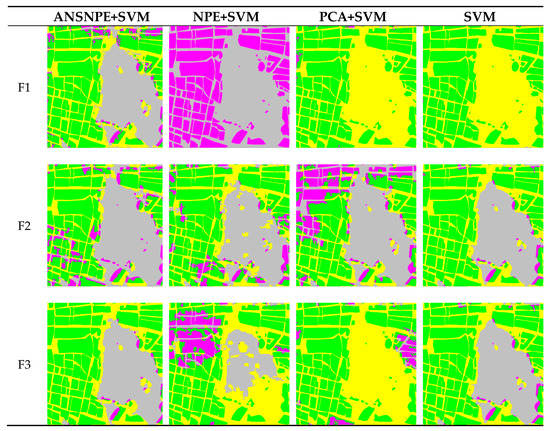
شکل 5. نتایج طبقه بندی سه مجموعه ویژگی. زرد به معنای مناطق ساختمانی نادرست است که استخراج می شود. رنگ سبز مناطق ساختمانی به درستی استخراج شده را نشان می دهد. قرمز مناطق ساختمانی را نشان می دهد که استخراج نشده اند. و خاکستری مناطق ساخته نشده را نشان می دهد.
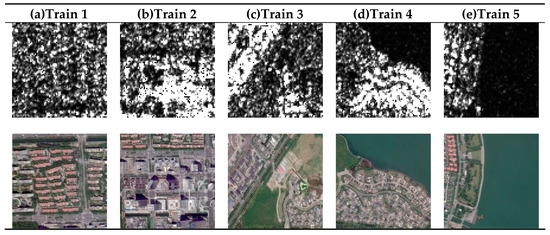
شکل 6. منطقه قطار و تصاویر گوگل مربوطه. ( الف ) قطار 1: ساختمانهای کم ارتفاع. ( ب ) قطار 2: ساختمانهای مرتفع. ( ج ) قطار 3: ساختمان ها و کارخانه ها. ( د ) قطار 4: ساختمان ها، گیاهان و آب. ( ه ) قطار 5: ساختمان، کارخانه و آب.
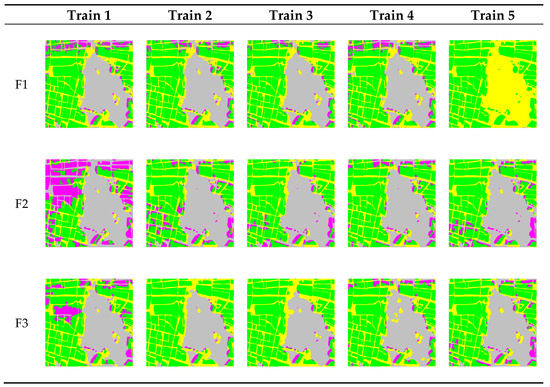
شکل 7. نتایج طبقه بندی سه مجموعه ویژگی. رنگ زرد مناطق ساختمانی نادرست را نشان می دهد که استخراج شده اند. رنگ سبز مناطق ساختمانی به درستی استخراج شده را نشان می دهد. قرمز مناطق ساختمانی را نشان می دهد که استخراج نشده اند. و خاکستری مناطق ساخته نشده را نشان می دهد.
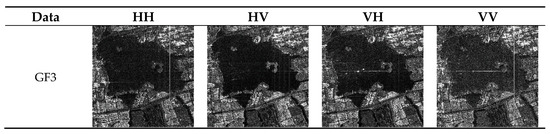
شکل 8. ویژگی های پراکندگی پشتی GF3.
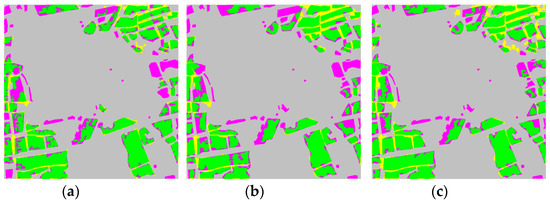
شکل 9. استخراج GF3 با سه مجموعه ویژگی. ( الف ) F1 +ANSNPE+SVM ( ب ) F2+ANSNPE+SVM ( ج ) F3+ANSNPE+SVM. رنگ زرد مناطق ساختمانی نادرست را نشان می دهد که استخراج شده اند. رنگ سبز مناطق ساختمانی به درستی استخراج شده را نشان می دهد. قرمز مناطق ساختمانی را نشان می دهد که استخراج نشده اند. و خاکستری مناطق ساخته نشده را نشان می دهد.


بدون دیدگاه