1. معرفی
راهیابی به مقصد از طریق یک محیط داخلی یا خارجی، یک رفتار هدفمند، جهت دار و با انگیزه برای یافتن کارآمد راه است [ 1 ، 2 ]. راه یابی همچنین شامل یک سری رفتارهای چالش برانگیز است که شرکت کنندگان را ملزم می کند تا از موقعیت مکانی خود آگاه باشند و با کمک نشانه های حسی نماینده محیط خارجی، خود را جهت دهی کنند [ 3 ]. نشانهها نقش مهمی در ارائه اطلاعات راهنمایی برای راهیابی در محیط فیزیکی دارند [ 4 ، 5 ] و میتوانند فرآیندهای تصمیمگیری را بهویژه در نقاط تصمیمگیری برای تغییر جهت سرعت بخشند. آلبرشت [ 6] کشف کرد که نشانه ها رابطه قوی با شناخت و حافظه فضایی شرکت کنندگان دارند. واضح است که نشانهها نقش اساسی بهعنوان تقویتکننده راهیابی و کاهشدهنده خطای ناوبری دارند و میتوانند بر تاکتیکها و استراتژیهای راهیابی تأثیر بگذارند.
با توجه به اهمیت نشانه ها، اندازه گیری برجستگی انواع مختلف نشانه ضروری است. Raubal و Winter [ 7 ] اولین رویکرد را برای شناسایی خودکار نشانهها و محاسبه برجستگی نقطه عطف پیشنهاد کردند. آنها سه نوع مختلف برجسته را تعریف کردند: بصری، معنایی و ساختاری. به عنوان مثال، اشیاء جغرافیایی اگر در تضاد شدید با محیط اطراف خود باشند، از نظر بصری جذاب هستند. متعاقبا، محققان به تدریج روش های مختلفی را برای تجزیه و تحلیل جذابیت نقطه عطف پیشنهاد کردند، مانند دانش تخصصی [ 8 ]، ردیابی چشم [ 9 ] و الکتروانسفالوگرافی (EGG) [ 10 ].]. در میان این روش ها، حرکات چشم به طور مستقیم رفتارهای بصری کاربران را منعکس می کند و به طور دقیق جذابیت نقطه عطف را می سنجد. بنابراین، مطالعاتی که شامل استنتاج برجستگی برجسته از حرکات چشم است، پدیدار شده است. تا به امروز، مطالعات استفاده از روش های ردیابی چشم را برای مقایسه تفاوت های شناختی در ناوبری بررسی کرده اند [ 11 ، 12 ، 13 ]. اگرچه جیا [ 14 ] یک مدل برجسته را پیشنهاد کرد که با داده های ردیابی چشم محاسبه می شود، آنها فقط جذابیت بصری را بدون جذابیت معنایی و ساختاری در نظر گرفتند. علاوه بر این، وظایف مختلف می تواند منجر به تولید داده های ردیابی چشم شود که با داده های مشاهده شده در رابطه با برجسته بودن نقطه عطف متفاوت است. محققان [ 11 , 15] با استفاده از داده های ردیابی چشم، وظایف راهیابی را استنباط کرده اند، اما رابطه بین وظایف و برجسته بودن نقطه عطف را کشف نکرده اند. بنابراین، تحقیقات اکتشافی در مورد اینکه چگونه دادههای ردیابی چشم، برجستگی بصری، معنایی و ساختاری نشانهها را برای وظایف مختلف محاسبه میکنند، هنوز یک تلاش چالشبرانگیز است.
در این مقاله، دادههای واجد شرایط ردیابی چشم و الگوریتمهای دقیق برای محاسبه برجستگی نشانههای داخلی انتخاب شدند. با توجه به اینکه مکان یابی و جهت گیری وظایف حیاتی در طول مسیریابی [ 11 ] است، تفاوت های وظیفه در برجستگی نقطه عطف داخل ساختمان بین این دو کار مقایسه شد. اگر تفاوت کار مهم رخ دهد، می توان یک مدل برجسته نقطه عطف داخلی برای مکان یابی و جهت گیری خود ایجاد کرد. به طور خاص، ما روی دو سؤال تمرکز کردیم:
-
آیا میتوان از دادههای ردیابی چشم برای ساخت یک مدل برجسته داخلی استفاده کرد؟ اگر چنین است، چگونه می توان از صحت نتایج برجسته اطمینان حاصل کرد؟
-
آیا تفاوت هایی در برجسته بودن نقطه عطف بین مکان یابی و جهت گیری در مسیریابی داخل ساختمان وجود دارد؟ اگر تفاوتهایی رخ دهد، چگونه میتوان یک مدل برجستگی نقطه عطف داخلی برای مکانیابی و جهتیابی خود ساخت؟
این مطالعه دو مشارکت اصلی دارد. از یک طرف، روش انتخاب ویژگی و الگوریتم وزن دهی ما برای درک رابطه بین معیارهای حرکت چشم و برجستگی نقطه عطف داخلی مفید است و می تواند روش محاسبه را برای برجستگی نقطه عطف داخلی گسترش دهد. از سوی دیگر، مقایسه تفاوتهای برجسته بین مکانیابی و جهتگیری برای محققان برای طراحی مجدد نشانههای داخلی مختلف بر روی نقشههای ناوبری برای کارهای مختلف راهیابی مفید است.
بقیه این مقاله به شرح زیر است. کار مرتبط در بخش 2 ارائه شده است . بخش 3 روش مورد استفاده برای ساخت مدل برجسته نمای داخلی را ارائه می دهد. بخش 4 ، یک مطالعه موردی، برای آزمایش مدل و مقایسه آن با تفاوتهای برجسته در دو کار طراحی شده است. بخش 5 عوامل مهم برای ساخت مدل برجستگی نقطه عطف را مورد بحث قرار می دهد و آن را با مطالعات قبلی مقایسه می کند. بخش 6 این گزارش را با نتیجه گیری و دستورالعمل هایی برای تحقیقات آتی به پایان می رساند.
2. پیشینه و کارهای مرتبط
2.1. مدلهای برجسته داخلی
نشانهها از ویژگیهای مهم در مسیرهای مسیر در طول مسیریابی هستند. Sorrows و Hirtle [ 16 ] نشانه ها را به عنوان اشیاء برجسته ای تعریف کردند که افراد به عنوان نقطه مرجع برای کمک به آنها در به خاطر سپردن و تشخیص مسیرها و همچنین مکان یابی خود از نظر مقصد نهایی خود استفاده می کنند. هدف از شناسایی نقطه عطف یافتن تمام اشیاء جغرافیایی در یک منطقه معین است که در اصل ممکن است به عنوان یک نقطه عطف عمل کند [ 17 ]]. برای محاسبه کمی نشانهها، مفهوم برجسته بودن نقطه عطف پیشنهاد شده است. برجستگی نقطه عطف بر مفهوم جذابیت استوار است که نشان دهنده اهمیت هر نقطه عطفی است. تولید یک مدل برجستگی نقطه عطف شامل دو جزء اصلی، جذابیت برجستگی نقطه عطف و روش های وزن دهی است.
از یک طرف، راوبال و وینتر [ 7 ] اولین رویکرد را برای طبقه بندی جذابیت برجستگی نقطه عطف ارائه کردند و برجستگی نقطه عطف را به سه نوع جذابیت (برجستگی بصری، معنایی و ساختاری) برای شناسایی نشانه ها تقسیم کردند. بر اساس این یافته، الیاس [ 18 ] برچسب های ساختمان، تراکم ساختمان و جهت گیری جاده را برای توصیف برجستگی اشیاء جغرافیایی معرفی کرد. ریشتر و وینتر [ 17 ] مدل رسمی را برای برجستگی نقطه عطف تعریف کردند که شامل چهار معیار جذابیت بصری است: ناحیه نما، شکل، رنگ و دید. زو [ 19] منطقه نما، اندازه تخته و ویژگی های طراحی را برای محاسبه برجستگی مکان های دیدنی داخلی پیشنهاد کرد. با این حال، هیچ اتفاق نظری در مورد طبقه بندی جذابیت برجسته اشیاء جغرافیایی وجود ندارد.
از سوی دیگر، باید برجستگی وزن را برجسته کرد. در حال حاضر از روش های وزن دهی مانند پرسشنامه، منابع اسنادی و دانش تخصصی برای اندازه گیری برجستگی نقطه عطف استفاده می شود. Mummidi و Krumm [ 20 ] برجستگی را با مقایسه تعداد دفعاتی که یک n-گرم خاص در یک خوشه ظاهر می شود (فرکانس اصطلاح) با تعداد دفعاتی که همان n-گرم در همه خوشه ها ترکیب می شود (فرکانس سند) محاسبه کردند. وانگ [ 21] دانش تخصصی را ترکیب کرد و تعاریفی را از دیدگاه شناختی و محاسباتی برای ارزیابی برجستگی نقطه عطف داخل ساختمان ارائه کرد. با این حال، چنین روش هایی دست و پا گیر و کار فشرده هستند. علاوه بر این، نتایج چنین روشهایی به دادههای موجود بستگی دارد، اما در تشخیص دادههای دیگر شکست خواهند خورد زیرا دادههای بسیار کمی وجود دارد.
علاوه بر این، سالهای اخیر شاهد پیشرفتهای سریع در مدلسازی دادههای فضایی داخلی و افزایش دسترسی به دادههای سیستم اطلاعات جغرافیایی داخلی (GIS) بودهاست [ 22 ]. در نتیجه این پیشرفتهای سریع در مدلسازی دادههای داخلی، بسیاری از برنامههای کاربردی مبتکرانه خدمات مبتنی بر مکان داخلی (LBS) مانند راهیابی داخلی [ 23 ] توسعه یافتهاند . بنابراین، مدلهای برجستگی نقطه عطف داخلی در سالهای اخیر مورد تحقیق قرار گرفتهاند. محققان [ 14 ، 19] مدلهای برجستگی نقطه عطف داخلی را بر اساس جذابیت بصری، معنایی و ساختاری پیشنهاد کردهاند که شبیه به مدل رسمی برجستهسازی فضای باز است. با این حال، این پارامترهای جذابیت (بصری، معنایی و ساختاری) در مدل برجستگی فضای باز را نمی توان به طور مستقیم در مدل برجستگی داخلی اعمال کرد. از یک طرف، عوامل جذابیت شاخص در فضاهای داخلی با عوامل جذاب در فضاهای بیرونی متفاوت است. اگرچه لی ال [ 24] پیشنهاد کرده است که جذابیت نشانه در فضای باز (فاکتور شکل، رنگ و اندازه) را می توان برای توصیف برجستگی نشانه های داخلی به کار برد، اهمیت فرهنگی و تاریخی در جذابیت نشانه در فضای باز را نمی توان به طور مستقیم برای توصیف نشانه ها در محیط های داخلی، مانند مراکز خرید یا فرودگاه ها در نظر گرفت. از سوی دیگر، چیدمان فضایی فضاهای داخلی با فضاهای بیرونی متفاوت است. برای مثال، چندین نوع شی را می توان به عنوان نشانه در محیط های بیرونی [ 25 ]، مانند کلیساها، مراکز خرید، و پل ها در نظر گرفت. با این حال، این اشیاء را نمی توان به عنوان نشانه در محیط های داخلی در نظر گرفت [ 26 ]. لیو [ 27] اشاره کرد که نشانه ها را می توان به چهار نوع طبقه بندی کرد: معماری (ستون ها و جلوها)، عملکرد (درها، پله ها و آسانسورها)، اطلاعات (علائم و پوسترها) و مبلمان (میز، صندلی، نیمکت و ماشین های خودکار). بنابراین، پیشنهاد یک مدل برجسته برای محیطهای داخلی ضروری است.
2.2. تفاوت در برجسته بودن نقطه عطف در طول مسیریابی
پیشرفت فعلی در علوم شناختی مربوط به راهیابی به بررسی چگونگی شناسایی نقاط عطف مرتبط، چگونگی بهبود دستورالعمل های مسیر و نحوه محاسبه مسیر بهتر می پردازد [ 3 ]. نشانهها در نقاط تصمیمگیری، ویژگیهای مهم در جهتهای مسیر در طول مسیریابی هستند. با این حال، تعداد زیادی از نشانه های احتمالی وجود دارد که می تواند در دستورالعمل های مسیر در موقعیت های مختلف و برای مسافران مختلف گنجانده شود [ 28 ]. مسافران مختلف نقاط دیدنی متفاوتی را پیدا میکنند که در یک موقعیت خاص بیشترین کاربرد را دارند.
سه بعد مهم (شخصی، مربوط به سیستم ناوبری و محیطی) وجود دارد که بر تفاوتهای برجسته در مسیریابی تأثیر میگذارد [ 29 ]. در بین این ابعاد، بعد شخصی مهمترین نقش را در جهت یابی شخص محور دارد و در این بعد است که بیشترین تفاوت در مسیریابی رخ می دهد. به عنوان مثال، نوهن [ 8] بعد شخصی و ویژگی های آن را با در نظر گرفتن پنج بعد شناسایی کرد: دانش شخصی، علایق شخصی، اهداف شخصی، پیشینه شخصی و ویژگی های فردی. این نویسنده بر اساس این ابعاد، یک مدل برجسته شخصی را پیشنهاد کرد. علاوه بر این، ابعاد یک کار راه یابی بر اساس تفاوت های شاخص ظاهر می شود. اگرچه استنباط وظیفه به طور گسترده در ناوبری عابر پیاده مورد تحقیق قرار گرفته است، تعداد کمی از محققین ابعاد وظیفه را در برجستگی نقطه عطف، به ویژه تفاوت های شاخص در مسیریابی فرد محور بیشتر بررسی کرده اند.
راه یابی یک رفتار شناختی برای یافتن یک مقصد دور با مجموعه ای از وظایف تاکتیکی و استراتژیک [ 30 ] است، از جمله خواندن نقشه، به خاطر سپردن مسیر، یافتن موقعیت مکانی و حفظ جهت گیری فرد با ویژگی های خارجی یا نشانه ها. وظایف مختلف منجر به اشکال مختلف توجه بصری و رفتارهای شناختی با توجه به نشانهها میشود. بنابراین، با انجام وظایف مختلف شرکت کنندگان، برجستگی نقطه عطف تغییر می کند. دو رفتار مهم در طول مسیریابی عبارتند از مکان یابی خود و جهت گیری فضایی [ 31 ]. در مکان یابی خود، فرد موقعیت خود را در یک محیط فضایی شناسایی می کند و شامل چندین فرآیند فرعی مانند جهت گیری نقشه، تطبیق ویژگی، و تطبیق پیکربندی می شود [ 17 ]]. جهت گیری فضایی ارتباط نزدیکی با موقعیت مکانی دارد. این شامل تعیین جهتی است که فرد هنگام ارائه یک دستورالعمل خارجی (نقشه های شناختی یا واقعی) با آن روبرو می شود [ 32 ]. وینر [ 33 ] یک سوگیری نگاه بین اکتشاف آزاد و وظایف مسیر از پیش تعیین شده را گزارش کرد. شرکت کنندگان تمایل قابل توجهی به انتخاب مسیری که طولانی ترین خط دید را در طول اکتشاف رایگان ارائه می دهد، نشان دادند، اما این روند در گروه مسیر انتخابی رخ نداد. وانگ [ 21] گزارش داد که اگرچه مردان و زنان سطوح اثربخشی و کارایی مشابهی در مکان یابی خود، به خاطر سپردن مسیر و دنبال کردن مسیر داشتند، اما تفاوت معنی داری بین آنها در نقشه خوانی و وظایف راهیابی در داخل خانه وجود داشت. با این حال، تحقیقات کمی تفاوت در برجسته بودن نقطه عطف بین وظایف مکان یابی و جهت گیری در محیط های داخلی را اندازه گیری کرده است.
2.3. ردیابی چشم برای تفاوت وظایف در برجسته بودن نقطه عطف
دو عامل مهم در مقایسه تفاوت های وظایف در مدل های برجسته وجود دارد: محاسبه برجستگی نقطه عطف و تجزیه و تحلیل آماری تفاوت های کار. محققان روش های متعددی [ 34 ، 35 ، 36 ] را برای محاسبه نقاط عطف در طول مسیریابی اتخاذ کرده اند، مانند پرسشنامه، تخمین وضعیت، و روش های ردیابی چشم. در میان این روشها، ردیابی چشم میتواند مستقیماً توجه بصری را به نشانهها به صورت کمی جلب کند. هر دو تجزیه و تحلیل کمی و کیفی داده های ردیابی چشم را می توان برای تعیین اینکه آیا تفاوت های قابل توجهی در برجستگی در طول مسیریابی رخ می دهد اعمال کرد.
از یک سو، در سالهای اخیر، روش ردیابی چشم به تدریج برای تجزیه و تحلیل عملکرد شناختی فضایی در شناسایی نشانهها پیشنهاد شده است، زیرا نگاه کاربر میتواند راهی آسان، سریع و طبیعی برای ثبت رفتارهای بصری با توجه به نشانهها ارائه کند [ 37 ] . علاوه بر این، داده های ردیابی چشم به محققان در تجزیه و تحلیل عملکرد نگاه به روش های کمی کمک می کند [ 38 ]. به عنوان مثال، داده های ردیابی چشم به عنوان یک منبع داده غنی برای استخراج توجه بصری به نقاط عطف در طول مسیریابی استفاده شده است [ 39 ، 40 ]. اخیراً از داده های ردیابی چشم توسط جیا استفاده شده است [ 14] برای محاسبه جذابیت بصری نقاط دیدنی. با این حال، این نویسنده فقط مشکل محاسبه مدل برجسته بصری را حل می کند. استفاده از داده های ردیابی چشم برای تولید یک مدل برجسته (جذابیت بصری، معنایی و ساختاری) آزمایش نشده است. محققان از روش ردیابی چشم برای تجزیه و تحلیل اطلاعات معنایی و مکانی استفاده کرده اند [ 21 ، 40 ]. برای مثال، Raubal [ 7 ] پیشنهاد کرد که نقشههای شهر و نمودارهای خیابان با تصاویر و پایگاههای داده محتوا تکمیل میشوند، که میتواند دادههای بصری و همچنین دادههای معنایی و ساختاری را ارائه دهد. وانگ [ 21 ] مناطق مورد علاقه (AOI) را بر روی نقشه های داخلی استخراج کرد تا اطلاعات معنایی نشانه ها را تجزیه و تحلیل کند. کیفر [ 41] پیشنهاد کرد که روش ردیابی چشم را می توان برای تجزیه و تحلیل اطلاعات مسیر و نشانه ها در موقعیت های تصمیم گیری انجام داد، که منعکس کننده جذابیت ساختاری نشانه ها است. بنابراین، از نظر تئوری امکان محاسبه مدل برجسته معنایی و ساختاری با دادههای ردیابی چشم وجود دارد.
از سوی دیگر، شرکت کنندگان با توجه به نقاط عطف با تغییر وظایفشان، الگوهای حرکتی چشم متفاوتی تولید می کنند [ 41 ، 42 ]. کیفر [ 43 ] روشهای یادگیری ماشینی را برای شناسایی شش فعالیت معمول نقشه از دادههای ردیابی چشم به کار برد، و ثابت کرد که دادههای ردیابی چشم را میتوان برای تشخیص وظایف کاربر اعمال کرد. لیائو [ 15] نشان داد که وظایف راهیابی (موقعیت خود، جهت گیری، به خاطر سپردن مسیر) را می توان با داده های ردیابی چشم در محیط های بیرونی استنباط کرد، که دری را به روی برنامه های بالقوه راه یاب داخلی باز می کند که می توانند اطلاعات مربوط به کار را بسته به وظیفه ای که کاربر انجام می دهد ارائه دهند. اجرا کردن با این حال، تحقیقات کمی تفاوتهای برجسته بین موقعیت مکانی و جهتگیری را بر اساس دادههای ردیابی چشم اندازهگیری کرده است.
3. مدل برجسته شاخص داخلی
بر اساس بحث در مورد کار مرتبط، داده های ردیابی چشم را می توان برای اندازه گیری برجستگی نقطه عطف به کار برد. هسته اصلی این روش محاسبه شامل در نظر گرفتن داده های ردیابی چشم به عنوان واسطه ای است که برای اندازه گیری ضریب جذابیت برجسته (بصری، معنایی، ساختاری) گرفته می شود. به عنوان مثال، جیا [ 14] یک مدل برجسته بصری از نشانهها را بر اساس آزمایشهای ردیابی چشم پیشنهاد کرد. کلید روش این نویسنده شامل استفاده از داده های ردیابی چشم برای نشان دادن یک مدل برجسته با جذابیت بصری قابل کنترل و قابل محاسبه است، که برای بهبود دقت مدل برجسته و ارائه راه حلی ضروری است که به تبعیض برجسته در تعاملات بین انسان ها می پردازد. و محیط ها با این حال، نویسنده جذابیت ساختاری یا معنایی را در نظر نگرفته است و تفاوت های برجسته بین وظایف مختلف مورد بحث قرار نگرفته است. در این بخش، ما روشی را برای تولید یک مدل برجسته نقطه عطف داخلی بر اساس دادههای ردیابی چشم پیشنهاد میکنیم که تفاوتها در وظایف مکانیابی و جهتیابی خود را در نظر میگیرد.
3.1. برجسته بودن بر اساس داده های ردیابی چشم
ما برجستگی نقطه عطف را بر اساس داده های ردیابی چشم به عنوان نتایج برجسته اشیاء محاسبه شده توسط داده های ردیابی چشم تعریف کردیم. برجستگی برجسته بر اساس داده های ردیابی چشم اسهyهبر اساس برجستگی نقطه عطف تحریک شده محاسبه شد ( اسستیمن)، در حالی که دقت از اسهyهبه دو روش انتخاب داده های ردیابی چشم و با محاسبه ضرایب داده های ردیابی چشم تعیین شد.
3.1.1. برجستگی برجسته برانگیخته
مفهوم برجستگی برجسته برانگیخته اسستیمنتوسط جیا [ 14 ] معرفی شد. اسستیمنبه معنای نتایج برجستگی نقطه عطف تحریک شده است که با درصد شرکت کنندگانی که شی را به عنوان نقطه عطف در یک محیط خاص انتخاب کرده اند اندازه گیری می شود [ 14 ]. در این مقاله، هشت تصویر صحنه داخلی را به عنوان تنظیمات خاص انتخاب کردیم. شرکت کنندگان موظف بودند این تصاویر را مشاهده کرده و نقطه عطف مورد علاقه خود را در هر یک از این تصاویر انتخاب کنند. جذابترین نشانهها در هر یک از این تصاویر برای محاسبه برجستگی نقطه عطف تحریکشده انتخاب شدند ( اسستیمن). درصد شرکتکنندگانی که جذابترین نقطه عطف را انتخاب کردند به عنوان نتیجه اندازهگیری شد اسستیمن. اسستیمننقش مهمی در محاسبه داشت اسهyه. از یک سو، داده های ردیابی چشم که هیچ رابطه آماری معنی داری با اسستیمنحذف شد؛ از سوی دیگر، اسستیمنبرای اندازه گیری ضریب داده های ردیابی چشم گرفته شد.
3.1.2. انتخاب داده های ردیابی چشم
1. طبقه بندی داده ها
بر اساس مطالعات قبلی، داده های ردیابی چشم (تثبیت، ساکاد و مردمک) به طور گسترده در مطالعات ردیابی چشم مورد استفاده قرار گرفته است [ 15 ، 44 ]. تجزیه و تحلیل کمی استراتژی های جستجوی بصری ارتباط نزدیکی با داده های ردیابی چشم در مناطق از پیش تعیین شده مورد علاقه (AOI) داشت [ 45 ]. بنابراین، داده های ردیابی چشم در هر دو AOI و کل منطقه جمع آوری می شود. شرح هر نمونه از داده های ردیابی چشم در جدول 1 ارائه شده است .
2. انتخاب داده ها
داده های ردیابی چشم که به طور قابل توجهی با برجستگی بینایی تحریک شده متفاوت بود اسستیمنبرای محاسبه برجستگی نقطه عطف انتخاب شدند.
• عادی سازی
عادی سازی می تواند یک عبارت ابعادی را به یک عبارت بدون بعد تبدیل کند به طوری که شاخص های واحدها یا مقیاس های مختلف را می توان مقایسه و وزن کرد. ویژگی ها به یک مقدار اعشاری از 0 تا 1 تا نرمال سازی حداقل حداکثر [ 46 ] تبدیل می شوند.
ایکسمترآایکس=حداکثرمن≤من≤نایکسمن، ایکسمترمنn=دقیقهمن≤من≤نایکسمن.
• فرایند انتخاب
برای جلوگیری از خطاهای عدم قطعیت مرتبط با برجستگی نقطه عطف بر اساس داده های ردیابی چشم، ویژگی های نرمال شده باید رابطه آماری معنی داری با نتایج برجسته داشته باشند. برجستگی برجستگی تحریک شده ( اسستیمن) به عنوان نتیجه برجسته در نظر گرفته شد. سپس از آنالیز واریانس یک طرفه برای اندازهگیری تفاوتهای معنیدار بین دادههای ردیابی چشم و برجستگی برجسته تحریکشده استفاده شد. اسستیمن). فقط ویژگی های مهم ( ص <) در این تحقیق انتخاب شدند.
3.1.3. الگوریتم های وزن دهی
1. انتخاب الگوریتم
الگوریتم وزن دهی یک روش ضروری برای محاسبه همبستگی است. برای تضمین پایایی نتایج همبستگی، در تحقیق ما از پنج روش وزن دهی استفاده شد. این روش ها شامل رگرسیون حداقل مربعات جزئی (PLQR)، فرآیند تحلیل سلسله مراتبی (AHP)، روش وزن آنتروپی (EWM)، روش انحراف استاندارد (SDM) و روش انتقادی است. این پنج روش وزن دهی کلاسیک هستند و معمولاً مورد استفاده قرار می گیرند. نتایج وزن دهی توسط SPSS 11.0 محاسبه شد. در این مقاله دقیق ترین الگوریتم انتخاب شد.
2. تست دقت
دقت روش وزن دهی با مقدار اختلاف مطلق بین برجستگی تحریک شده آزمایش شد ( اسستیمن) و برجستگی بینایی محاسبه شده با داده های ردیابی چشم ( اسهyه). تفاوت کوچکتر در نتایج آزمون دقت بهتر روش وزن دهی را ثابت کرد.
3.1.4. فرآیند محاسبه
بر اساس یافته های قبلی [ 14 ]، اسهyهبا حاصلضرب داده های ردیابی چشم و ضرایب آنها اندازه گیری شد اسستیمنبرای محاسبه ضرایب داده های ردیابی چشم گرفته شد. بنابراین، فرمول برجسته بودن نقطه عطف بر اساس داده های ردیابی چشم اسهyهبه شرح زیر پیشنهاد می شود:
جایی که ایکسنام یک نقطه عطف است، nتعداد انواع داده های ردیابی چشم را نشان می دهد، λانواع مختلف داده های ردیابی چشم را نشان می دهد و هضرایب داده های ردیابی چشم است. هر چه ارزش آن بزرگتر باشد هاست، اهمیت بیشتر λ.
فرآیند محاسبه برجسته بودن نقطه عطف بر اساس داده های ردیابی چشم در جدول 2 ارائه شده است .
3.2. مدل برجسته شاخص داخلی
3.2.1. جذابیت بصری
1. ویژگی های شکل
شکل برجسته یک ویژگی برجسته ضروری است. طبق تعریف ریشتر و وینتر [ 17 ]، ضریب شکل و انحراف انتخاب شدند. به بیان ساده، ضریب شکل نسبت ارتفاع و عرض است. انحراف نسبت مساحت مستطیل حداقل مرزی (mbr) نمای جسم به مساحت نمای آن است [ 26 ]. اشکال و انحرافات غیرمعمول، به ویژه در میان اجسام منظم تر و جعبه مانند، بسیار قابل توجه است.
2. ویژگی های رنگ
یک نقطه عطف در صورتی برجسته می شود که رنگ یا سبک آن با اشیاء اطراف تضاد داشته باشد. ما از خطای رنگ (∆h) و روشنایی برای اندازهگیری رنگ نشانه استفاده کردیم. از خطای رنگ می توان برای مقایسه تفاوت مقدار رنگ بین یک نقطه عطف و یک محیط داخلی استفاده کرد. RGB نقطه عطف و طبقه توسط فتوشاپ به LAB تبدیل شد و خطاهای رنگ توسط ColorTell ( www.colortell.com ) محاسبه شد. سبکی به گونه ای اندازه گیری شد که گویی نقطه عطف شامل یک بخش روشن (پنجره، در، تصاویر) است. اگر یک بخش روشن در نقطه عطف وجود داشت، مقدار سبکی 1 بود.
3. محوطه نما
مساحت نما برای محاسبه اندازه یک نقطه عطف استفاده می شود [ 26 ]. اگر سطح نمای یک شی به طور قابل توجهی بزرگتر یا کوچکتر از قسمت های نمای اشیاء اطراف باشد، آنگاه این شی به خوبی قابل توجه می شود. مساحت نما بر حسب ارتفاع ضرب در عرض اندازه گیری شد.
4. ویژگی های دید
فاصله بصری برای اندازه گیری دید استفاده می شود. واضح است که اگر فاصله بصری یک نقطه عطف کمتر از سایر اشیاء باشد، آن نقطه عطف بیشتر قابل توجه خواهد بود. فاصله بصری به عنوان کوتاه ترین فاصله بین مکان شرکت کننده و نقطه عطف اندازه گیری شد.
اطلاعات دقیق جذابیت بصری در جدول 3 نشان داده شده است.
3.2.2. جذابیت معنایی
1. اهمیت معنایی
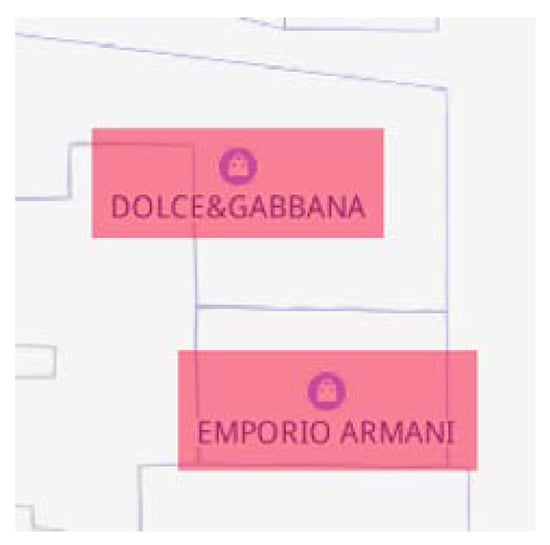
این ویژگی نشان میدهد که آیا یک شی معنی مهمی دارد یا خیر. اهمیت معنایی نشان دهنده نسبت مدت زمان تثبیت AOI و مدت زمان تثبیت کل در طول کارهای نقشه خوانی است. AOI شامل نام و نماد نقطه یک شی روی نقشه است.
جاست و کارپنتر [ 47 ] ذکر کردند که مدت تثبیت طولانیتر یا به معنای مشکل در درک اطلاعات است یا نشاندهنده این است که شرکتکنندگان علاقه بیشتری نشان میدهند. با این حال، توضیح قبلی در این مقاله رد شده است زیرا شرکت کنندگان تحصیل کرده بودند و می توانند اطلاعات معنایی روی نقشه را تفسیر کنند. علاوه بر این، شرکتکنندگان با انجام وظایفی هدایت شدند تا نقاط مهم مهم را بدون محدودیت زمانی بر روی نقشهها بیابند و به خاطر بسپارند. بنابراین، هر چه مدت زمان توجه بصری به یک AOI بیشتر باشد، اهمیت معنایی معنای شی بیشتر می شود. بر اساس تحقیقات قبلی [ 14 ، 48 ]، AOIها به دلیل عدم دقت در حرکات چشم، نام و نماد اجسام با بافر را شامل می شوند. AOI ها در شکل 1 نشان داده شده اند.
2. علائم صریح
یک شی ممکن است دارای علائم واضح باشد، مانند علائم در جلوی یک فروشگاه. این نشانه ها به صراحت یک شی را برچسب گذاری می کنند و معنای آن را به اشتراک می گذارند. این ویژگی با یک مقدار بولی ارزیابی شد.
3. درجه آشنایی
این ویژگی نشان می دهد که آیا شرکت کنندگان با یک علامت آشنا هستند یا خیر. اولاً شیء باید علامت داشته باشد. در غیر این صورت، مقدار 0 است. سپس، میزان آشنایی با نسبت شرکت کنندگانی که با علامت آشنا بودند محاسبه شد ( جدول 4 ).
3.2.3. جذابیت ساختار
1. تعداد مسیرهای مجاور
اشیایی که در تقاطع ها قرار دارند برای دستورالعمل های مسیر اهمیت بیشتری نسبت به اشیاء واقع در طول مسیرها دارند. اگر یک شی در مجاورت بیش از یک مسیر باشد، در تقاطع خیابان قرار دارد و بنابراین مناسب تر است. برای ارزیابی برجستگی نقطه عطف، تعداد لبه های مجاور جسم ذخیره شد.
2. تعداد اشیاء مجاور
اشیاء مستقل از اشیایی که همسایه های زیادی دارند جذاب ترند. این ویژگی عمدتاً برای تابلوها و آسانسورها مهم است زیرا اشیاء دیگر مانند فروشگاه ها معمولاً به سازه های دیگر متصل هستند. تعداد اشیاء مجاور برای ارزیابی برجستگی ساختاری ذخیره شد.
3. اهمیت مکان
اهمیت مکان نشان دهنده جذابیت اشیاء ناشی از مکان های مختلف است. اهمیت مکان را می توان با فاصله بین یک شی و نزدیکترین گره محاسبه کرد. گره ها تقاطع های یک شبکه هستند [ 17 ]. در این مقاله، تقاطع ها در نقشه داخلی دیوید مال ( map.baidu.com ) به عنوان گره انتخاب شدند.
جایی که ایکسگره است و yیک شی است. را د(y،ایکس)نشان دهنده فاصله بین گره ها است ایکسو شیء y. از آنجایی که هیچ دو اتاقی فضای یکسانی را اشغال نمی کنند، فاصله بین هر اتاقی وجود دارد ایکسو y0 نخواهد بود. اگر فاصله بین ایکسو yپس از آن کمتر از 1 متر است L(ایکس)1 است ( جدول 5 ).
3.2.4. فرآیند مدلسازی
1. مقایسه تفاوتهای برجسته بین موقعیت مکانی و جهتگیری
تعیین اینکه آیا تفاوت در برجسته بودن نقطه عطف بین وظایف مکان یابی و جهت یابی قبل از ایجاد یک مدل برجسته برای این دو کار ضروری است. برجستگی برجسته بر اساس داده های ردیابی چشم اسهyهبرای هر دو مکان خود محاسبه شد ( اسهyهسهلf-لoجآتیمنon) و جهت گیری ( اسهyهorمنهnتیآتیمنon). برای اندازه گیری تفاوت های آماری معنی دار بین آنالیز واریانس یک طرفه استفاده شد اسهyهسهلf-لoجآتیمنonو اسهyهorمنهnتیآتیمنonبا استفاده از SPSS 11.0 نتایج ( پ<0.05) نشان می دهد که تفاوت معنی داری بین خود مکان یابی و جهت گیری یافت می شود و مدل برجسته نقطه عطفی را می توان برای هر دو کار ایجاد کرد. در غیر این صورت، ساختن یک مدل برجسته بصری برای این دو کار بی معنی است.
2. مدل برجسته نقطه عطف داخلی برای دو کار
جیا [ 14 ] این را پیشنهاد کرد اسهyهمی توان برای ساخت ضریب جذابیت برجستگی نقطه عطف استفاده کرد. با توجه به اینکه آیا تفاوت معنی داری بین وجود دارد یا خیر اسهyهسهلf-لoجآتیمنonو اسهyهorمنهnتیآتیمنon، ضرایب بین دو کار متفاوت است. بدین ترتیب، اسلآnدمترآrکتیآسکسنشان دهنده مدل برجسته بصری برای وظایف مختلف است.
فرمول مدل برجستگی بصری به شرح زیر است:
جایی که fنشان دهنده جذابیت برجسته و wضریب جذابیت نقطه عطف است. وظایف شامل مکان یابی و جهت گیری است.
4. مطالعه موردی
4.1. طراحی تجربی
4.1.1. دستگاه
یک ردیاب چشم Tobii X120 (Tobii AB، سوئد، www.tobii.com ) با نرخ نمونه برداری 120 هرتز و یک مانیتور 22 اینچی سامسونگ انتخاب شد. X120 دارای دقت ضبط 0.5 درجه و ممکن است انحراف 0.1 درجه داشته باشد. وضوح مکانی 0.3 درجه و خطای حرکت سر در 0.2 درجه بود. فاصله ردیابی بصری بین 50 تا 80 سانتی متر بود. مانیتور محرک ها را با وضوح صفحه نمایش 1680 × 1050 پیکسل نمایش می دهد. برای مدیریت و تحلیل داده های ردیابی چشم از نرم افزار Tobii Pro Analyzer استفاده شد. این تحقیق با تجزیه و تحلیل دادههای ردیابی چشم قادر به دستیابی به بینش عمیقی در مورد برجستگی بصری در مورد تصاویر و نقشههای داخلی بود.
4.1.2. روش
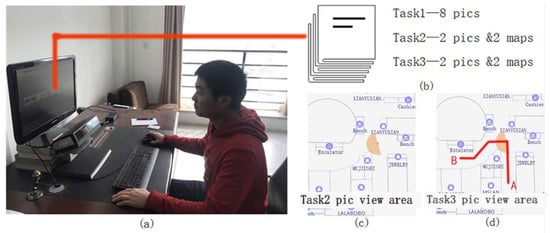
آزمایش در یک اتاق ساکت و با نور خوب انجام شد ( شکل 2 a). در آموزش پیش آزمون، شرکت کنندگان مورد استقبال قرار گرفتند و ملزم به ارائه اطلاعات شخصی (جنسیت، سن، آشنایی با دیوید مال و تجربه استفاده از کامپیوتر در زندگی روزمره) و تکمیل دو آزمون مهارت شدند. تحقیقات قبلی گزارش کرده است که وظایف راهیابی در رابطه با مهارت های فضایی و مهارت های خود گزارشی مورد بررسی قرار گرفته است [ 50]. آزمون چرخش ذهنی (MRT) و مقیاس حس جهت سانتا باربارا (SBSOD) می تواند به ترتیب برای آزمایش مهارت های فضایی و مهارت های خود گزارش دهی استفاده شود. از شرکت کنندگان خواسته شد قبل از آزمایش دو آزمون را تکمیل کنند تا از داشتن مهارت های مشابه مطمئن شوند. علاوه بر این، از آنجایی که Tobii X120 نمیتوانست از شرکتکنندگان برای بررسی مجدد محرکها پشتیبانی کند، به شرکتکنندگان اطلاع داده شد که محرکهای آزمایشی را در طول فرآیند آزمایشی به خاطر بسپارند.
در آزمایش رسمی، از شرکت کنندگان خواسته شد تا سه کار را تکمیل کنند ( شکل 2 ب). دستورالعمل برای شرکت کنندگان در زیر شرح داده شده است:
-
کار شماره 1 (انتخاب نقطه عطف): فرض کنید در یک مرکز خرید هستید. هنگامی که آزمایش شروع می شود، هشت تصویر صحنه داخلی را در یک زمان مشاهده خواهید کرد. لطفاً جذابترین نشانه (فروشگاه، نیمکت، آسانسور یا تابلوها) را در هر تصویر انتخاب کنید. وقتی نتیجه را پیدا کردید، برای ادامه روی علامت مشخصه کلیک کنید. هیچ محدودیت زمانی برای شما برای یافتن نقطه عطف وجود ندارد.
-
وظیفه شماره 2 (خود محلی سازی): موقعیت مکانی خود را روی نقشه پیدا خواهید کرد. ابتدا باید یک تصویر صحنه داخلی را با دقت مشاهده کنید و سعی کنید تا حد امکان اطلاعات مهم مورد نیاز را به خاطر بسپارید. شما اجازه ندارید دوباره به تصویر نگاه کنید. سپس، باید مکان را پیدا کنید و روی آن در نقشه داخلی کلیک کنید. دو مکان باید در این مرحله پیدا شود.
-
وظیفه شماره 3 (جهت گیری): جهت گیری خود را در تصویر صحنه داخلی با کمک نشانه ها پیدا خواهید کرد. باید اطلاعات شاخص مربوط به مسیر A تا B را در نقشه داخلی به خاطر بسپارید. سپس جهت صحیح رسیدن به B را مشخص کرده و روی تصویر کلیک کنید. در این کار باید به دو جهت اشاره کرد. پس از آن، آزمایش به پایان می رسد.
4.1.3. محرک ها
دوازده پانوراما به عنوان تصاویر صحنه داخلی برای آزمایش ردیابی چشم ایجاد شد. تصاویر پانوراما با استفاده از دوربین کانن 800D با لنز 18 تا 55 میلیمتری در مرکز خرید ژنگژو دیوید، چین عکاسی شدهاند. دوربین روی سه پایه 1.5 متری ثابت شد. در هر مکان 60 عکس گرفتیم. پانورامای تولید شده توسط کامپیوتر با استفاده از PTGui ( www.ptgui.com ) ساخته شده است. با این حال، پانورامای 360 درجه استفاده نشد، زیرا با کشیدن پانورامای 360 درجه، اعوجاج تصویر رخ داد. در این بین، به دلیل محدودیت اندازه صفحه نمایش، تشخیص اطلاعات دقیق در پانورامای 360 درجه نشان داده شده در یک تصویر برای شرکت کنندگان دشوار بود. بنابراین، نیمی از پانوراما را با a انتخاب کردیم 180درجهزاویه دید ( شکل 2 c,d).
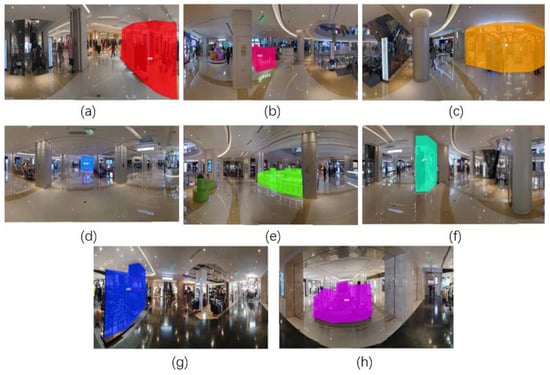
بر اساس روش تجربی، هشت تصویر صحنه داخلی در کار 1 انتخاب شد ( شکل 3 a-h). هنگامی که شرکت کنندگان یک تصویر را مشاهده کردند، روی نقطه عطف مورد علاقه خود در محرک ها کلیک کردند. پس از آزمایش، جذاب ترین نشانه ها، که در شکل 3 a-h مشخص شده اند، به عنوان AOI برای تجزیه و تحلیل داده های ردیابی چشم تعریف شدند. AOI ها با تحقیق از طریق Tobii Analyzer تقسیم شدند، که می تواند برای جمع آوری و محاسبه داده های ردیابی چشم در داخل یا بدون AOI استفاده شود. نمایش این هشت تصویر از اصل مربع لاتین پیروی می کرد.
در کار 2، چهار نقشه داخلی Baidu ( map.baidu.com ) به عنوان نقشه های دو بعدی داخلی انتخاب شدند. نقشه های داخلی Baidu به طور گسترده توسط عموم مردم در چین استفاده می شود، که تضمین می کند که شرکت کنندگان سطوح مشابهی از آشنایی دارند. فتوشاپ برای علامتگذاری مجدد همه نشانهها و طراحی مجدد نماد نقطه در همان الگو اعمال شد ( شکل 4 (a2,b2,c2,d2)). برای مشاهده رفتارهای جهتگیری در کار 3، مسیرهای ناوبری از A تا B در این نقشههای تغییر یافته ترسیم شدند ( شکل 4 (a3,b3,c3,d3)).
از شرکت کنندگان خواسته شد تصاویر را مشاهده کنند تا مکان خود را در کار 2 بیابند و مسیرهای ناوبری را برای یافتن جهت های خود در کار 3 به خاطر بسپارند. برای اینکه شرکت کنندگان تصاویر صحنه داخلی مشابهی را در کار 2 و 3 مشاهده نکنند، شرکت کنندگان تقسیم شدند. به دو گروه ترتیب محرک های تجربی بین گروه های 1 و 2 متفاوت بود. برای شرکت کنندگان در گروه 1، ترتیب شکل 4 a2-a1-b2-b1 در کار 2 و شکل 4 c1-c3-d1-d3 در کار 3 بود. گروه 2، ترتیب شکل 4 c2-c1-d2-d1 در کار 2 و شکل 4 a1-a3-b1-b3 در کار 3 بود.
4.1.4. شركت كنندگان
در مجموع چهل و شش دانشآموز پسر جوان در رشته نقشهبرداری برای پیوستن به آزمایش آزمایشی ما به عنوان یک درس تجربی استخدام شدند. نتایج پنج شرکتکننده حذف شد، زیرا نرخ نمونهگیری آنها (محاسبهشده توسط آنالیزور Tobii) زیر 80 درصد بود [ 51 ]]. چهار شرکت کننده به دلیل گذراندن SBSOD و MRT حذف شدند. پنج شرکت کننده به دلیل آشنایی با مرکز خرید دیوید به انجام آزمایش ادامه ندادند. بنابراین، سی و دو شرکت کننده به انجام آزمایش های رسمی ادامه دادند. بر اساس محرک های آزمایشی، شرکت کنندگان به دو گروه تقسیم شدند. شانزده شرکت کننده در گروه 1 بین 18 تا 29 سال سن داشتند (میانگین سنی = 23.97، SD = 1.54). در گروه 2، شانزده شرکت کننده بین 18 تا 27 سال سن داشتند (میانگین سنی = 22.63، SD = 1.67).
همه شرکت کنندگان با فناوری محاسبات آشنا بودند. همه آنها دید طبیعی یا اصلاح شده به نرمال داشتند و می توانستند آزمایش را به طور مستقل انجام دهند. این آزمایش توسط هیئت بررسی نهادی محلی (IRB) بررسی و تایید شد. همه شرکت کنندگان رضایت آگاهانه کتبی خود را برای شرکت در آزمایش ارائه کردند.
4.2. نتایج
4.2.1. برجسته بودن بر اساس داده های ردیابی چشم
برای پاسخ به سوال 1، با توجه به اینکه آیا می توان از داده های ردیابی چشم برای محاسبه برجستگی نقطه عطف استفاده کرد، داده های ردیابی چشم با استفاده از پنج الگوریتم انتخاب و وزن شدند. با توجه به انتخاب شرکت کنندگان، برجستگی برجسته تحریک شده ( اسستیمن) نتایج به ترتیب 0.594، 0.906، 0.750، 0.594، 0.875، 0.813، 0.688 و 0.875 در شکل 3 a-h بودند.
1. انتخاب ویژگی
تمام تصاویر ( شکل 3 a-h) در کار 1 برای انتخاب ویژگی استفاده شد. از آنالیز واریانس یک طرفه برای مقایسه روابط معناداری بین برجستگی نقطه عطف تحریک شده استفاده شد ( اسستیمن) و داده های ردیابی چشم ( اسهyه) نتایج در جدول 6 نشان داده شده است. واضح است که هفت ویژگی تفاوت های قابل توجهی با برجستگی نقطه عطف تحریک شده دارند. این ویژگیها، شامل مدت زمان کل تثبیت، تعداد کل تثبیت، مدت زمان نگاه، تعداد تثبیت، مدت زمان کل ساکاد، مدت زمان ساکاد و تفاوت مردمک، برای محاسبه برجستگی بینایی بر اساس دادههای ردیابی چشم انتخاب شدند. این ویژگیها شامل تثبیت، ساکاد و نوع مردمک بود که اطمینان میداد که همه انواع متریک چشم در تحقیق ما در نظر گرفته شدهاند.
2. وزن دهی ویژگی
برای ساخت فرمول برجسته بصری بر اساس داده های ردیابی چشم، داده های ردیابی چشم در شکل 3 a-f در کار 1 برای اندازه گیری ضریب استفاده شد. برای محاسبه ضریب می توان از هر دو روش رگرسیون آماری و وزن دهی استفاده کرد. برای انتخاب بهترین روش، از SPSS 11.0 برای مقایسه این الگوریتمهای وزندهی استفاده شد. نتایج در جدول 7 نشان داده شده است.
3. دقت نتایج
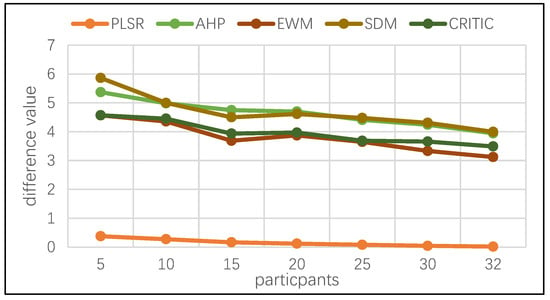
داده های ردیابی چشم در شکل 3 g,h برای آزمایش دقت الگوریتم وزن گیری جمع آوری شد. شکل 5 نتایج مقدار تفاوت (dv) شرکت کنندگان را نشان می دهد. واضح است که مقدار تفاوت SDM از الگوریتم های دیگر از پنج شرکت کننده (dv = 5.86) تا 32 شرکت کننده (dv = 3.99) بالاتر است و ثابت می کند که SDM بدترین روش برای محاسبه ضریب است. تمام نتایج کمترین مقدار اختلاف برای PLSR مشاهده شد که نشان میدهد PLSR بهترین روش وزندهی در این آزمایش است. این یافته شواهد قبلی را تأیید می کند که نشان می دهد PLSR دقیق ترین روش برای برجسته سازی بینایی بر اساس داده های ردیابی چشم است، همانطور که توسط Jia [ 14 ] پیشنهاد شده است.
4. برجسته بودن بر اساس داده های ردیابی چشم
شکل 5 نشان می دهد که نتایج مقادیر مختلف با افزایش تعداد شرکت کنندگان در بین این الگوریتم ها کاهش می یابد. میانگین اختلاف بین 30 و 32 شرکت کننده 01/0 است که نشان می دهد تعداد شرکت کنندگان برای این تحقیق کافی است. فرمول برجسته بودن نقطه عطف بر اساس داده های ردیابی چشم به صورت زیر نشان داده شده است:
4.2.2. تفاوت در برجسته بودن نقطه عطف بین مکان یابی و جهت گیری
برای پاسخ به سوال 2، با توجه به اینکه آیا تفاوت در برجسته بودن نقطه عطف بین وظایف مکان یابی و جهت گیری رخ می دهد یا خیر، برجستگی بصری نوزده نقطه عطف در وظایف 2 و 3 بر اساس داده های ردیابی چشم محاسبه شد (فرمول در بخش 3.1 )، و برای تجزیه و تحلیل تفاوت های معنی دار از ANOVA یک طرفه استفاده شد. نتایج در جدول 8 نشان داده شده است.
تکلیف 2 (موقعیت خود) به طور قابل توجهی با تکلیف 3 (جهت گیری) در برجسته بودن نقطه عطف متفاوت بود (F = 4.156 p = 0.048 < 0.05)، که نشان می دهد شرکت کنندگان عملکرد بصری متفاوتی در مورد AOI در وظایف 2 و 3 دارند.
تفاوت در برجسته بودن نقطه عطف بین وظایف 2 و 3 در هر AOI وجود دارد. مطابق جدول 8، نوزده AOI تفاوت های قابل توجهی را در برجسته بودن نقطه عطف بین وظایف مکان یابی و جهت گیری نشان می دهند. شرکتکنندگان در کار 3 توجه بصری بیشتری به ذخیرهسازی AOI داشتند (AOI1 = 1.105، AOI5 = 0.789، AOI6 = 1.287، AOI11 = 1.074، AOI14 = 1.148، AOI16 = 1.0193 از AOI16 = 1.0193 و AOI16 = 1.0193 در آنها) = 0.851، AOI5 = 0.413، AOI11 = 0.663، AOI14 = 0.835، AOI16 = 0.817 و AOI19 = 0.339). AOI های آسانسور نیز تفاوت های قابل توجهی مشابهی را نشان می دهند. برجستگی برجسته آسانسور در کار 3 به طور قابل توجهی بیشتر از کار 2 است، که نشان می دهد شرکت کنندگان در کار جهت یابی به مکان های دیدنی انبار و آسانسور توجه بیشتری داشتند. با این حال، تعیین برجستگی شاخص نیمکت ها دشوار است. اگرچه برجسته بودن نیمکت در وظیفه 3 (AOI4 = 0.
4.2.3. الگوی برجسته برای خود مکان یابی و جهت گیری
نتایج قبلی در بخش 4.2.2 نشان میدهد که تفاوتهایی در برجستگی نقطه عطف بین وظایف 2 و 3 رخ میدهد. بنابراین، مدل برجستگی نقطه عطفی را میتوان برای وظایف مکانیابی و جهتیابی خود ساخت. بر اساس فرآیند مدلسازی، جذابیت برجستگی نقطه عطف عادی شد و نتایج با برجستگی نقطه عطف بر اساس دادههای ردیابی چشم در وظایف 2 و 3 با استفاده از ANOVA یک طرفه مقایسه شد. سپس، جذابیت برجستگی نقطه عطفی با تفاوت معنادار برای رگرسیون از طریق PLSR انتخاب شد. نتایج در جدول 9 نشان داده شده است.
جدول 9 نشان می دهد که مدل برجستگی نقطه عطف شامل 9 عامل برای هر دو کار 2 و 3 است. روشنایی، علائم صریح و عوامل شی مجاور برای مدل سازی برجستگی نقطه عطف انتخاب نشده اند. علاوه بر این، ضرایب عوامل انتخاب شده یکسان نبود. در کار 2، فاصله بصری به طور معناداری با همبستگی منفی داشت اسهyه. در کار 3، فاصله بصری و درجه آشنایی با عوامل همبستگی منفی داشت اسهyه.
مطابق جدول 9 ، مدلهای برجسته به شرح زیر تولید میشوند:
مدل برجسته برجسته برای خود مکان یابی:
مدل برجسته برای جهت گیری:
5. بحث
در این بخش، ابتدا عوامل مهمی را که بر تولید مدل برجسته نقطه عطف داخلی تأثیر میگذارند، تحلیل میکنیم. سپس در مورد تفاوتهای برجسته بین وظایف مکانیابی و جهتیابی از دیدگاه شرکتکنندگان و محیطهای داخلی بحث میکنیم. در نهایت، ما دقت مدل خود را با روش های وزن دهی قبلی مقایسه می کنیم و بهبودهایی را برای مدل خود پیشنهاد می کنیم.
5.1. عوامل مهم برای مدل برجسته بودن نقطه عطف
همانطور که توسط یافته های قبلی در بخش 4.2.1 و بخش 4.2.2 نشان داده شد ، به سوال 1 در مورد اینکه آیا برجستگی نقطه عطف را می توان با داده های ردیابی چشم محاسبه کرد، پاسخ داده شده است. در این قسمت سه عامل مهم برای ساخت مدل برجسته نشان داده شده است.
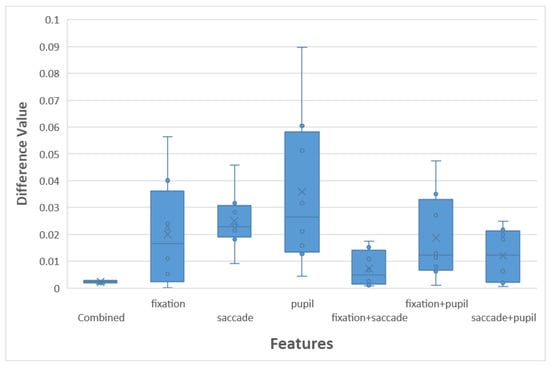
اولین عامل، نوع داده های ردیابی چشم است. برای اثبات پایایی دادههای ردیابی چشم انتخابی (ویژگیهای ترکیبی)، هفت نوع ویژگی (ویژگیهای ترکیبی، ثابت، ساکاد، مردمک، تثبیت+ ساکاد، تثبیت+ مردمک و ساکاد+ مردمک) در تصاویر تکلیف 1 جمعآوری شد. و برای محاسبه ضریب از PLSR استفاده شد. نتایج مقدار تفاوت بین برجستگی بصری تحریک شده و برجستگی پیش بینی شده هفت ویژگی در شکل 6 نشان داده شده است. واضح است که ویژگی ترکیبی کمترین مقدار تفاوت را دارد (میانگین = 0.0022، SD = 0.0004)، که بهبود دقت برجسته بصری را بر اساس ویژگیهای تثبیت و سایر انواع دادههای ردیابی چشم ممکن میسازد.
عامل دوم الگوریتم وزن دهی است. نتایج قبلی در بخش 5.1 ثابت می کند که PLSR بهترین الگوریتم در این تحقیق است. دو دلیل برای این نتیجه گیری وجود دارد. از یک طرف، داده های ردیابی چشم انتخاب شده به طور قابل توجهی با برجستگی بینایی تحریک شده متفاوت است ( جدول 8 )، و نتایج ANOVA بر اساس SPSS نشان می دهد که داده های ردیابی چشم از توزیع نرمال پیروی می کنند، به این معنی که ویژگی های انتخاب شده می توانند برای ایجاد معادلات رگرسیون خطی چندگانه استفاده می شود [ 14]. از سوی دیگر، در PLSR، برجستگی بینایی تحریکشده و دادههای ردیابی چشم به ترتیب به عنوان متغیرهای وابسته و مستقل اندازهگیری میشوند، در حالی که الگوریتمهای دیگر فقط تغییرپذیری دادههای ردیابی چشم را در نظر میگیرند.
آخرین عامل اهمیت جذابیت برجسته برجسته است. جدول 9 نشان می دهد که ضرایب عامل برای وظایف خود مکان یابی و جهت گیری متفاوت است. به عنوان مثال، میزان آشنایی به طور قابل توجهی در گروه مکان یابی با خود همبستگی مثبت دارد، اما با برجستگی نقطه عطف بر اساس داده های ردیابی چشم در گروه جهت گیری همبستگی منفی دارد.
5.2. تفاوت در برجسته بودن نقطه عطف بین مکان یابی و جهت گیری
بخش 4.2 به سؤال 2 با توجه به اینکه آیا تفاوت در برجسته بودن نقطه عطف بین وظایف مکان یابی و جهت گیری رخ داده است، پاسخ داد. برای توضیح این مشکل، رفتارهای بصری شرکت کنندگان و محیط های داخلی در این بخش مورد تجزیه و تحلیل قرار می گیرد.
5.2.1. تفاوت در رفتارهای بصری شرکت کنندگان
برای اثبات اینکه شرکت کنندگان رفتارهای بصری متفاوتی در مکان یابی و جهت گیری خود دارند از آزمون t استفاده شد ( جدول 10 ). تفاوت های قابل توجهی بین این دو کار در چهار نوع داده ردیابی چشم (مدت زمان تثبیت کل، مدت زمان نگاه، مدت زمان کل ساکاد و مدت زمان ساکاد) وجود دارد. به عنوان مثال، شرکت کنندگان در گروه مکان یابی، مدت زمان نگاه 1.124 ثانیه (SD = 0.535) در تکلیف مکان یابی خود داشتند که به طور قابل توجهی کمتر از شرکت کنندگان در کار جهت یابی است (میانگین = 1.818 ثانیه، SD = 0.789)، نشان می دهد که مدت زمان نگاه شرکت کنندگان در کار مکان یابی کوتاه تر از کار جهت گیری بود.
تفاوت های مشابهی در ویژگی های کل ساکاد رخ می دهد. مدت زمان کل گروه ها در وظایف 2 و 3 به ترتیب 059/1 ثانیه (176/0 = انحراف معیار) و 597/1 ثانیه (126/0 = انحراف معیار) بود که نشان می دهد شرکت کنندگان در گروه مکان یابی به طور قابل توجهی مدت زمان ساکد کوتاه تری نسبت به قبل داشتند. گروه جهت گیری ( t = -20.207، p <0.001). با این حال، تفاوت قابل توجهی در ویژگی های مردمک (اندازه مردمک، اندازه مردمک AOI و تفاوت مردمک) بین گروه های مکان یابی و جهت گیری وجود ندارد، که نشان می دهد شرکت کنندگان رفتارهای دانش آموز مشابهی با توجه به AOI در وظایف 2 و 3 دارند.
5.2.2. تفاوت در محیط های داخلی
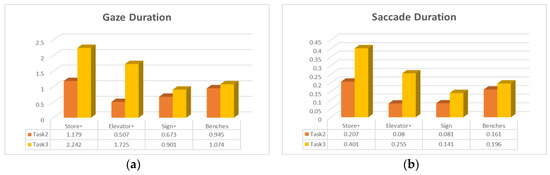
در این قسمت مدت زمان نگاه و مدت زمان ساکاد را انتخاب می کنیم. نتایج آزمون t نشان میدهد که شرکتکنندگان به طور قابلتوجهی به انواع نشانههای داخلی بین مکانیابی و جهتگیری توجه متفاوتی میکنند ( شکل 7 ).
شرکتکنندگان در گروه جهتیابی نسبت به شرکتکنندگان در گروه مکانیابی (میانگین) مدت زمان نگاه (میانگین = 2.242 ثانیه، انحراف معیار = 0.547) و مدت زمان ساکاد (میانگین = 0.401 ثانیه، SD = 0.141) در مکانهای دیدنی فروشگاه به طور قابلتوجهی طولانیتر بودند. = 1.179 ثانیه، SD = 0.442؛ میانگین = 0.207 ثانیه، SD = 0.107). روند مشابهی برای لندمارک آسانسور نیز رخ می دهد. میانگین مدت زمان نگاه و مدت زمان ساکد شرکت کنندگان در گروه جهت یابی به ترتیب 1.725 ثانیه (SD = 0.858) و 0.255 ثانیه (SD = 0.121) بود که به طور معنی داری بیشتر از گروه خود مکان یابی بود که نشان می دهد فروشگاه و نشانه های آسانسور به طور قابل توجهی برای گروه جهت گیری جذاب تر از گروه مکان یابی خود بود. اگرچه شرکتکنندگان در گروه جهتگیری مدت زمان نگاه کوتاهتری به نشانهها داشتند (t = -2.698، p = 0.004)، مدت زمان ساکاد در نشانه ها تفاوت معنی داری بین گروه های خود مکان و جهت گیری نشان نداد ( t = -0.521، p = 0.309).
دو دلیل برای این پدیده وجود دارد. ابتدا یک مرکز خرید سرپوشیده را به عنوان محیط آزمایشی انتخاب کردیم. فروشگاه ها مهم ترین مکان های دیدنی در یک مرکز خرید هستند و شرکت کنندگان مستعد دیدن مکان های دیدنی فروشگاه هستند. دوم، با توجه به مدل برجسته نقطه عطف، علائم صریح نقش مهمی در برجستگی معنایی ایفا میکنند، که نشان میدهد برای شرکتکنندگان آسانتر است که این عامل را جذاب بدانند. نشانههای فروشگاه دارای علامتهای صریح هستند، اما بقیه اینطور نیستند.
5.3. در مقایسه با تحقیقات قبلی
تحقیقات قبلی عمدتاً برجستگی برجسته را با وزن دهی برابر، دانش تخصصی و روش امتیازدهی مبتنی بر نمونه محاسبه کرده است. به عنوان مثال، مدل اصلی برجسته همه وزنها را برابر [ 7 ] قرار میدهد و این روش توسط مدلهای برجسته متفاوت [ 17 ، 26 ] اقتباس شده است. Nuhn [ 8 ] یک مدل برجسته پیشنهاد کرد که نتایج را با استفاده از دانش تخصصی بر اساس تحقیقات رسمی وزن می کند. زو [ 19 ] یک سیستم امتیازدهی مبتنی بر نمونه برای ارزیابی برجستگی نقطه عطف داخل ساختمان ساخت. بنابراین، روشهای PLSR، وزندهی برابر، دانش تخصصی و روشهای امتیازدهی مبتنی بر نمونه برای مقایسه دقت روشهای ارزیابی برجستگی برجسته انتخاب شدند.
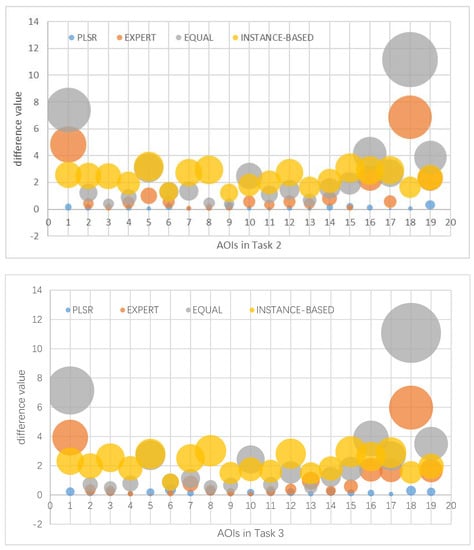
نتایج وزن دهی برجسته محاسبه شده توسط PLSR در بخش 4.2 ذکر شده است. نتایج وزن دهی ارزیابی شده با روش وزن دهی برابر در جدول 11 نشان داده شده است. در مورد روش دانش خبره، هفت محقق با مدرک دکترای نقشه برداری دعوت شدند تا اهمیت برجسته بودن نقطه عطف داخلی را ارزیابی کنند و نتایج در جدول 11 نشان داده شده است. با توجه به روش امتیازدهی مبتنی بر نمونه، نتایج جذابیت برجسته و وزن دهی از Zhu [ 19 ] اقتباس شده است. برجستگی نقطه عطف اندازه گیری شده توسط سه الگوریتم با برجستگی نقطه عطف بر اساس داده های ردیابی چشم در بخش 4.2.2 مقایسه شد. نتایج مقدار اختلاف در شکل 8 نشان داده شده است.
همانطور که در شکل 8 ارائه شده است ، اندازه دایره نشان دهنده تفاوت برجسته بین داده های ردیابی چشم و چهار روش وزن دهی است. هرچه اندازه دایره بزرگتر باشد، مقدار اختلاف بزرگتر است. مقادیر اختلاف PLSR نسبت به سه روش وزن دهی دیگر در هر دو کار 2 و 3 کمتر است. بالاترین مقدار اختلاف نشان داده شده در AOI18 با وزن دهی برابر در هر دو کار 2 و 3 محاسبه شد. با این حال، مقدار تفاوت محاسبه شده با وزن مساوی کمتر است. از روشهای محاسبه شده با دانش تخصصی و روش امتیازدهی مبتنی بر نمونه در AOI13 در کار 3. بنابراین، دقیقترین روش وزندهی در این مطالعه PLSR است. دقت سه روش وزن دهی دیگر در جذابیت ها و وظایف مشخصه های مختلف تغییر می کند.
5.4. بهبودها برای مطالعات جاری
مطالعات قبلی تفاوتهای برجسته را در ابعاد شخصی، ابعاد زمانی (روز و شب) و ابعاد محیطی (داخلی و بیرونی) در نظر گرفتهاند، اما تعداد کمی از محققان تفاوتهای برجسته را در میان وظایف مختلف راهیابی تعیین کردهاند. به عنوان مثال، Nuhn و Timpf [ 8 ] ابعاد شخصی نشانه ها، از جمله دانش فضایی، علایق، اهداف و پیشینه را تعریف کردند. علاوه بر این، برجستگی یک شی در افراد با ابعاد شخصی مختلف متفاوت است. داکهام، وینتر و رابینسون [ 4 ] عوامل شب در مقابل روز را برای محاسبه برجستگی نقاط عطف فردی معرفی کردند. با توجه به بعد محیطی، محققان یک مدل برجسته برای محیط های داخلی و خارجی پیشنهاد کرده اند [ 24 ], 27 , 28 ]. با این حال، آنها نتوانستند تفاوت های برجسته را در وظایف مختلف تعیین کنند. این مقاله روشی را برای محاسبه برجستگی نقطه عطف بر اساس دادههای ردیابی چشم شرکتکنندگان ارائه میکند، و مدلهای برجستگی نقطه عطفی بین وظایف مکانیابی و جهتیابی متفاوت است.
برجستگی نقطه عطف داخلی پیشنهاد شده در این مقاله می تواند برای طراحی نقشه های داخلی برای کارهای مختلف اعمال شود. برای مثال، ما نتایج برجستهای را در طبقه اول مرکز خرید دیوید محاسبه کردیم. نقاط عطفی با نتایج برجسته می تواند به عنوان مناطق مورد علاقه (AOI) [ 26 ] در نظر گرفته شود. بنابراین، ما نقاط عطفی با نتایج برجسته بالاتر از میانگین نتایج به عنوان AOI انتخاب کردیم. نقشه های داخلی برای مکان یابی و جهت گیری توسط ArcMap 10.1 طراحی شده است ( شکل 9 ). شکل 9 نشان می دهد که AOI ها بین نقشه های داخلی برای مکان یابی و جهت گیری متفاوت هستند. به عنوان مثال، Coach و BOTTEGA AOI در نقشه های داخلی برای جهت یابی هستند، اما آنها AOI در نقشه داخلی برای مکان یابی خود نیستند.
علاوه بر این، تحقیقات موجود از فناوری های ورودی بصری برای تحقق تعاملات انسان و رایانه برای ناوبری استفاده کرده است. ریشتر [ 17 ] اشاره کرد که تعامل بین انسان و رایانه تمرکز خاصی بر راهیابی دارد. علاوه بر این، ارجاعات برجسته ثابت شده است که اهمیت و مزایای این تعامل را نشان می دهد. برجسته بودن نقطه عطف بر اساس داده های ردیابی چشم را می توان از نظر تئوری در ناوبری داخلی در زمان واقعی وارد کرد. به عنوان مثال، شرکت کنندگان تنها می توانند به صورت غیر فعال اطلاعات شاخص را در هنگام استفاده از برنامه های ناوبری سنتی دریافت کنند. بنابراین، میتوان یک دستیار ناوبری آگاه از نگاه در زمان واقعی ساخت که بتواند به طور فعال حرکات چشم شرکتکننده را تشخیص دهد [ 15 ]]، برجستگی بصری را محاسبه کنید و در آینده نقاط دیدنی جذاب را به شرکت کننده پیشنهاد دهید.
6. نتیجه گیری و تحقیقات آتی
این مطالعه با هدف ایجاد یک مدل برجستگی نقطه عطف داخلی بر اساس دادههای ردیابی چشم و مقایسه تفاوتهای برجستگی بین خود مکان و جهتگیری انجام شد. نتایج دو یافته را نشان می دهد. یافته 1 ثابت می کند که داده های ردیابی چشم را می توان برای اندازه گیری برجستگی مکان های داخلی استفاده کرد. به عنوان مثال، هفت نوع حرکت چشم را می توان برای تجزیه و تحلیل برجستگی به کار برد، و نتیجه برجسته داده های ترکیبی ردیابی چشم دقیق تر از سایر انواع حرکات چشم بود. علاوه بر این، الگوریتم وزن دهی PLSR از سایر روش های وزن دهی فعلی دقیق تر بود. یافته 2 نشان می دهد که تفاوت های قابل توجهی در برجستگی نقطه عطف بین موقعیت مکانی و جهت گیری رخ داده است. شرکت کنندگان در کار جهت یابی به مکان های دیدنی که فروشگاه ها و آسانسورها بودند توجه بیشتری داشتند. بدین ترتیب، ایجاد یک مدل برجسته نقطه عطف داخلی برای کارهای مختلف ضروری است. این مطالعه میتواند به توسعه طراحی نقشه ناوبری داخلی در نقشهبرداری و علوم GIS کمک کند. به عنوان مثال، نشانههای با برجستگی بالاتر میتوانند در نقشههای ناوبری داخلی برجسته شوند. در این میان، طراحی مجدد نقشه های داخلی برای کارهای مختلف راهیابی برای نقشه نگاران معنادار است.
با این حال، از آنجایی که مواد آزمایشی تصاویر آماری بودند، عملکرد بصری را در محیطهای دنیای واقعی مورد بحث قرار ندادیم. اولین چالش آزمایشهای داخلی در دنیای واقعی، نحوه محاسبه جذابیت برجسته است. به عنوان مثال، اطلاعات مربوط به فاکتورهای شکل، فاصله بصری یا مناطق نما همچنان با راه رفتن شرکت کنندگان تغییر می کند. تعریف دقیق عوامل بصری نشانه های مختلف دشوار است. چالش دوم حواس پرتی ناشی از مشتریان در یک مرکز خرید است. شرکت کنندگان ممکن است توسط افراد در محیط های دنیای واقعی جذب شوند و تمرکز آنها در آزمایش ممکن است کاهش یابد.
همانطور که در بخش قبل مورد بحث قرار گرفت، تحقیقات آینده می تواند بر تعریف و محاسبه جذابیت برجسته نقطه عطف در تغییر صحنه تمرکز کند. علاوه بر این، تحقیقات آینده میتواند آزمایشهایی را برای تشخیص جذابیت برجسته در صحنههای مختلف داخلی، مانند فرودگاهها، بیمارستانها یا مراکز کنفرانس انجام دهد.







بدون دیدگاه