1. معرفی
در سال های اخیر، با افزایش استفاده از دستگاه های تلفن همراه هوشمند، به عنوان مثال، تلفن های هوشمند، تقاضای مشتری برای خدمات مکان داخلی به طور فزاینده ای قوی شده است. از آنجایی که سیگنالهای فناوری موقعیتیابی ماهوارهای کنونی برای محیطهای داخلی به دلیل تضعیف سیگنال و اثر چند مسیره [ 1 ] تخریب یا رد میشوند، ارائه خدمات مکانیابی مطمئن به مشتریان در یک محیط داخلی دشوار است. بنابراین، جستجوی یک طرح ناوبری مطمئن و دقیق در داخل ساختمان بسیار چالش برانگیز است. بسیاری از محققان در تحقیقات فناوری موقعیت یابی داخلی، مانند حسگرهای اینرسی [ 2 ، 3 ، 4 ، 5 ، 6 ، 7 ، پیشرفت زیادی کرده اند.]، بلوتوث [ 8 ، 9 ]، مغناطیس [ 10 ، 11 ]، شناسایی فرکانس رادیویی [ 12 ، 13 ]، باند فوق عریض [ 14 ، 15 ]، شبکه محلی بی سیم [ 16 ، 17 ، 18 ، 19 ]، و بینایی کامپیوتر [ 20 ، 21]. با این حال، بیشتر فناوریهای مکانیابی داخلی به یک زیرساخت خاص متکی هستند و برای استقرار و نگهداری هزینه بالایی دارند. محاسبه مردگان عابر پیاده (PDR)، بهویژه در گوشیهای هوشمند، به دلیل موقعیتیابی مداوم، بهروزرسانی سریع دادهها و توانایی آن برای کار بدون هیچ سختافزار اضافی، نقش مهمی را در مکانهای داخلی بازی میکند. PDR از اطلاعات راه رفتن بهدستآمده از حسگر اینرسی برای تخمین مسیر و طول گام عابر پیاده [ 2 ] استفاده میکند و بهطور دورهای موقعیت عابر پیاده را مطابق با حالت قبلی بهروزرسانی میکند. روشهای متعددی گزارش شدهاند که به طور دقیق تعداد گامها را تشخیص میدهند و طول گام را تخمین میزنند [ 3 ، 6 ]، اما چالشهای بزرگ هنوز در برآورد سرفصلها باقی مانده است.
در حال حاضر، دو مشکل اصلی در مورد برآورد مسیر عابر پیاده وجود دارد. اولاً، سنسورهای اینرسی نصب شده بر روی دستگاههای تلفن همراه نه تنها تحت تأثیر رانش ناشی از ویژگیهای خود قرار میگیرند، بلکه در برابر اختلالات محیطی از جمله میدانهای مغناطیسی و حرکت نامنظم انسان نیز حساس هستند. افضل و همکاران [ 22 ] تداخل میدان مغناطیسی محیطی بر بردار سه محوری مغناطیس سنج را به چهار دسته تقسیم کرد و خطای هر دسته را برای تصحیح تخمین عنوان محاسبه کرد. پولوز و همکاران [ 23 ] یک الگوریتم کالیبراسیون برای اثرات سخت و نرم پیشنهاد کرد، و فاکتورهای مقیاس و مقادیر افست برای کالیبراسیون مغناطیس سنج برای افزایش عملکرد تخمین عنوان استفاده شد. ژنگ و همکاران [ 24] دقت و استحکام سیستم موقعیت یابی را با استفاده از الگوریتم به روز رسانی سرعت صفر برای تنظیم مجدد تجمع خطای شتاب سنج در مرحله راه رفتن بهبود بخشید. لین و همکاران [ 25 ] از یک نشانگر قدرت سیگنال دریافتی برای تصحیح خطای جهت گیری PDR استفاده کرد، اما محدودیت این است که فقط برای عابران پیاده که در یک خط مستقیم راه می روند اعمال می شود. در [ 26 ، 27]، برخی از تکنیکهای همجوشی برای بهبود عملکرد تخمین عنوان سنسورهای کمهزینه، مانند فیلتر کالمن خطی، فیلتر کالمن توسعهیافته، فیلتر کالمن بدون عطر، فیلترهای مکمل و فیلتر ذرات (PF) مورد استفاده قرار گرفتند. با این حال، بسیاری از رویکردهای موجود محدود هستند و تنها زمانی قادر به ردیابی هستند که تلفن هوشمند به روشی تعریفشده یا محدود در طول کل دوره پیادهروی حمل شود، که همیشه در زندگی واقعی صادق نیست.
برخی از محققان بر تخمین عنوان برای کاربران در حالات حرکتی و حالت های مختلف تلفن تمرکز کرده اند. وانگ و همکاران [ 28 ] سناریوهای استفاده از دستگاه را به حالتهای مختلف (از جمله پیام کوتاه، تماس، چرخش و جیبی) تقسیم کرد تا انحرافات مختلف یک مسیر عابر پیاده را برای هر حالت تنظیم کند. با این حال، زمانی که تلفن هوشمند در حرکت پویا باشد، انحراف قبلی برای تطبیق دشوار خواهد بود. لیو و همکاران [ 29] از مولفه افقی سرعت زاویه ای محاسبه شده با تبدیل اندازه گیری های اینرسی از چارچوب مرجع دستگاه به چارچوب مرجع زمین برای تخمین مسیر عابر پیاده بر اساس اصل حداقل مربعات استفاده کرد. با این حال، یک مشکل با این برآورد وجود دارد، به عنوان مثال، حل معادله برآورد عنوان منحصر به فرد نیست. پی و همکاران [ 1 ] روشی را برای به دست آوردن یک تخمین سرفصل قوی با استفاده از یک انتگرال شتاب افقی دو مرحله ای پیشنهاد کرد، که از محدودیت وضعیت تلفن در برنامه سنتی PDR عبور کرد.
سایر محققین از تجزیه و تحلیل مؤلفه های اصلی (PCA) برای تخمین عنوان استفاده کرده اند. وانگ و همکاران [ 30 ] یک روش مبتنی بر PCA با شتابهای جهانی برای استنتاج عناوین عابر پیاده پیشنهاد کرد و یک روش حذف ابهام برای کالیبره کردن عناوین بهدستآمده توسعه یافت. این روش میتواند تخمین سرفصل با دقت بالا را در زمان نسبتاً کوتاهی (در عرض چند دقیقه) به دست آورد، اما هنوز حل مشکل عنوان در دورههای زمانی طولانیتر دشوار است.
تجمع خطا ناشی از سنسورهای کم هزینه باعث می شود که روش PDR به تنهایی نتواند به دقت قابل قبولی دست یابد [ 31 ]. علاوه بر تحقیق در مورد تخمین سرفصل، برخی از محققان بر روی تکنیکهای ردیابی و اصلاح مسیر داخل ساختمان تمرکز کردند [ 5 ، 18 ، 19 ، 31 ، 32 ، 33 ]. گوو و همکاران [ 32 ، 34 ] یک مدل گره پیوند داخلی غنی از معنایی ساخت و از اطلاعات معنایی استنباط شده برای مطابقت با این مدل برای استخراج مسیر صحیح کاربر استفاده کرد. ژو و همکاران [ 31] از یک گراف شبکه مسیر افزوده معنایی با طول لبه تطبیقی برای ارائه محدودیت معنایی برای کالیبراسیون مسیر با استفاده از یک الگوریتم فیلتر ذرات استفاده کرد، که دقت بهبود یافتهای 1.23 متر را به دست آورد، همراه با اطلاعات معنایی داخلی متصل به حرکت هر عابر پیاده. وانگ و همکاران [ 5 ] یک الگوریتم تطبیق همبستگی را بر اساس طرح نقشه و تقسیم منطقه یک نقشه طبقه ارائه کرد تا تجمع خطاهای مرتبط با موقعیتیابی PDR را محدود کند، که خطای انباشتگی سیستمهای PDR را تا حد معینی حذف کرد و کیفیت و دقت را بهبود بخشید. از نتایج موقعیت یابی
اگرچه تحقیقات زیادی در مورد بهبود عملکرد گوشیهای هوشمند در تخمین و موقعیتیابی سرفصلها انجام شده است، اما مشکلات PDR در موارد چند حالته چند حالته همچنان وجود دارد. این مطالعه بر تشخیص حالت حرکت و محلیسازی عابران پیاده در داخل ساختمان متمرکز است. روش ما دقت و استحکام سیستم PDR را با حل مشکلات نگه داشتن گوشی هوشمند در حالت های مختلف و تجمع انحراف موقعیت، افزایش می دهد. مشارکت های اصلی کار ما به شرح زیر است:
-
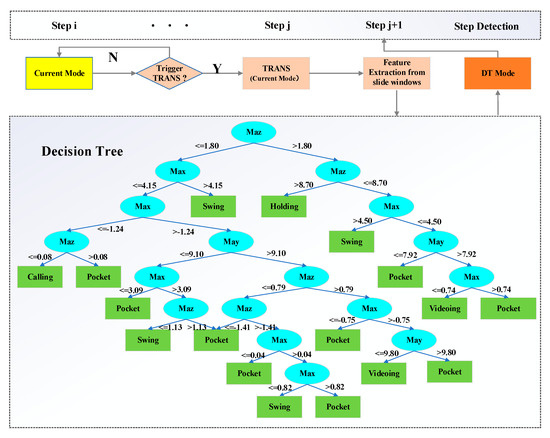
طبق عادت روزانه عابر پیاده در استفاده از تلفن، ما پنج حالت معمولی برای حمل گوشی هوشمند تعریف کردیم که شامل نگه داشتن، فیلمبرداری، تماس، تاب خوردن و جیب می شود. در کارهای قبلی، دادههای حسگر به طور مداوم استخراج میشد تا حالت دستگاه را تشخیص دهد، که نه تنها حافظه زیادی مصرف میکند، بلکه عمر باتری را نیز تا حد زیادی کاهش میدهد. با تطبیق یک آستانه از پیش تعریف شده، الگوریتم ماشین حالت محدود (FSM) می تواند بدون استخراج ویژگی های داده، به سوئیچ حالت پاسخ به موقع بدهد. بنابراین، در این مقاله، الگوریتمهای FSM و درخت تصمیم (DT) برای انجام پایش بلادرنگ و تشخیص حالت تلفن ترکیب شدند. این روش از یک الگوریتم DT برای شناسایی حالت فعلی کاربر استفاده می کند، زمانی که الگوریتم FSM تغییر حالت دستگاه را تشخیص دهد.
-
ما روش تخمین سرفصل گام به گام را با معرفی اطلاعات ژیروسکوپ برای محاسبه عنوان جهانی عابر پیاده در مرحله خطی بهبود دادیم. علاوه بر این، ما یک الگوریتم تطبیق نقشه مبتنی بر فیلتر ذرات را برای بهبود عملکرد برای تخمین عنوان و موقعیتیابی معرفی کردیم. ما آزمایشهایی را برای ارزیابی عملکرد روش پیشنهادی در دو صحنه انجام دادیم: یک سایت آزمایشی موقعیتیابی داخلی و یک گاراژ پارکینگ زیرزمینی. نتایج نشان میدهد که الگوریتم پیشنهادی عملکرد قوی برای تخمین سرفصل و موقعیتیابی در حالتهای استفاده مختلف به دست میآورد.
ساختار اصلی مقاله به شرح زیر است. بخش 1 مرور ادبیات چندین روش و محدودیت های آنها است. بخش 2 روش های پیشنهادی تشخیص حالت و تخمین سرفصل را به تفصیل معرفی می کند. نتایج تجربی تشخیص حرکت و مکان یابی فضای داخلی در بخش 3 نشان داده شده است. در بخش 4 ، نتیجه گیری ارائه شده و محدودیت های مطالعه مورد بحث قرار می گیرد.
2. مواد و روشها
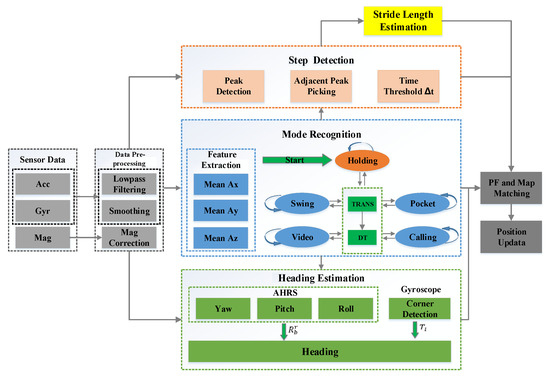
معماری سیستم PDR که شامل پیش پردازش داده ها، تشخیص مرحله، تشخیص حالت و تخمین عنوان است، در شکل 1 نشان داده شده است.. سنسورهای اینرسی ارزان قیمت نصب شده بر روی گوشی های هوشمند نه تنها تحت تاثیر رانش ناشی از ویژگی های خاص خود قرار می گیرند، بلکه در برابر اختلالات محیطی نیز حساس هستند. بنابراین لازم است قبل از استفاده از سیگنال اصلی به دست آمده فیلتر و کالیبره شود. ویژگی ها از حسگرهای اینرسی استخراج می شوند که ورودی طبقه بندی کننده هستند. الگوریتم ماشین حالت محدود (FSM) و درخت تصمیم (DT) برای انجام نظارت بلادرنگ و تشخیص حالت تلفن ترکیب شده اند. این روش از الگوریتم DT برای تشخیص حالت فعلی کاربر استفاده می کند، هنگامی که الگوریتم FSM تغییر نگرش دستگاه را تشخیص داد. پارامترهای تشخیص گام و تشخیص گوشه بر اساس نتایج طبقه بندی کننده تنظیم می شوند و موقعیت های PDR توسط PF به روز می شوند.
2.1. پیش پردازش داده های خام
به دلیل سنسورهای ارزان قیمت نصب شده روی گوشی هوشمند، نویز زیادی در سیگنال های خام سنسورها وجود دارد. لازم است سیگنالهای اصلی بهدستآمده قبل از استفاده، از قبل پردازش شوند تا تأثیر نامطلوب نویز حسگر بر تشخیص حالت و موقعیتیابی کاربر تضعیف شود.
2.1.1. فیلتر پایین گذر و صاف کردن
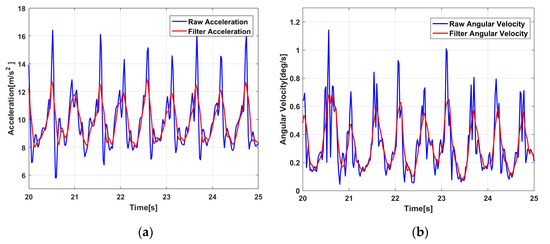
هنگامی که عابر پیاده در حال راه رفتن است، سیگنال های شتاب تمایل دارند تا در اطراف مولفه گرانش به سمت بالا و پایین در نوسان باشند. سیگنالهای شتاب معمولاً برای تشخیص وقوع رویداد مرحله و به عنوان ورودی تخمین عنوان استفاده میشوند. از آزمایش مشخص شد که برخی از اجزای فرکانس بالا بر نتایج تشخیص گام و تخمین سرفصل تأثیر میگذارند [ 35]. بر اساس تجزیه و تحلیل دادهها در الگوهای استفاده از دستگاههای مختلف، متوجه شدیم که فرکانس بیشتر سیگنالها کمتر از 8 هرتز است، بنابراین از فیلتر پایین گذر Butterworth مرتبه چهارم با فرکانس قطع 8 هرتز برای حذف استفاده شد. تاثیر نویز با فرکانس بالا سپس، سیگنالها توسط یک الگوریتم میانگین متحرک برای حذف سوراخهای غیرضروری هموار شدند. سایز پنجره صاف هفت نمونه می باشد. همانطور که در شکل 2 نشان داده شده است ، سیگنال های شتاب فیلتر شده حاوی نویز کمتری هستند که می تواند ویژگی های حرکت عابر پیاده را با وضوح بیشتری منعکس کند.
2.1.2. کالیبراسیون مغناطیس سنج
به طور کلی، مغناطیس سنج گوشی هوشمند مستعد خطاهای داخلی و اختلالات خارجی است و خطاهای داخلی سنسور مغناطیس سنج ناشی از فرآیند ساخت و کیفیت قطعه را می توان به خطای غیر متعامد، خطای حساسیت، نویز سنسور و صفر افست تقسیم کرد. [ 36 ].
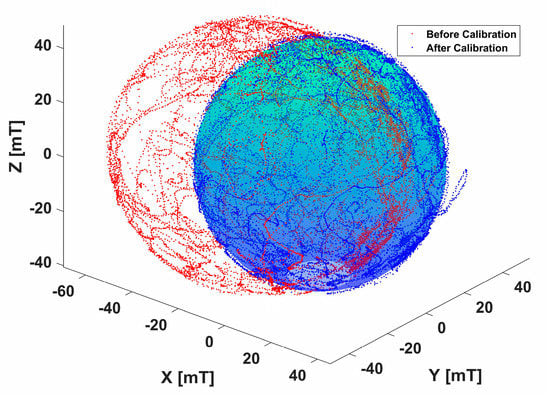
مغناطیس سنج منبع اطلاعاتی مهمی برای محاسبه جهت گیری تجهیزات است، بنابراین کالیبراسیون مغناطیس سنج بسیار ضروری است. در این مقاله، گوشی هوشمند حول سه محور دستگاه چرخانده میشود و دادههای نمونه مغناطیسسنج بهدستآمده با استفاده از روش حداقل مربعات برازش بیضی کالیبره میشوند [ 37 ]. شکل 3 مقایسه نتایج قبل و بعد از کالیبراسیون داده های مغناطیس سنج است.
2.2. تشخیص حالت
در استفاده روزانه، سیگنالهای خروجی توسط اجزای اینرسی داخلی یک تلفن هوشمند معمولاً به دلیل جهتگیریهای مختلف دستگاه یا ناهنجاریهایی در رفتار عابر پیاده، ویژگیهای مختلفی را نشان میدهند. بنابراین، حالت گوشی هوشمند باید برای کمک به PDR دستی نظارت و شناسایی شود [ 30 ]. با توجه به عادت روزانه عابر پیاده در استفاده از تلفن، ما پنج حالت معمولی برای حمل گوشی هوشمند تعریف کردیم که شامل نگه داشتن، فیلمبرداری، تماس، تاب خوردن و جیب می شود. ژست های گوشی به طور مفصل به شرح زیر است:
نگهداشتن: موردی که در آن گوشی هوشمند در جلوی بدنه با صفحه نمایش رو به بالا نگه داشته میشود و هدینگ گوشی با جهت حرکت کاربر در یک راستا قرار میگیرد.
فیلمبرداری: موردی که در آن گوشی هوشمند در جلوی بدنه نگه داشته می شود و صفحه نمایش گوشی به سمت بدن او است.
تماس: موردی است که عابر پیاده تماس می گیرد و گوشی را نزدیک گوش خود می گذارد. در این حالت صفحه نمایش گوشی به کنار بدن او اشاره می کند.
تاب: موردی که در آن عابر پیاده گوشی را در دست می گیرد و در حین راه رفتن بازوی خود را به طور طبیعی به اطراف می چرخاند. در این حالت با توجه به عادات استفاده از گوشی، فرض می کنیم که صفحه گوشی به سمت بدنه و گوشی تقریباً جهت حرکت عابر پیاده یا زمین را نشان می دهد.
جیب: قابی که در آن گوشی در جیب جلویی شلوار حمل می شود. در این حالت، هدینگ گوشی با حرکت بدنه تغییر میکند و زمانی که عابر پیاده در حالت ایستا قرار دارد، صفحه تلفن تقریباً عمود بر زمین است.
در این مطالعه، یک الگوریتم نظارت و تشخیص حالت دستگاه سبک وزن پیشنهاد شده است که می توان آن را به دو ماژول تقسیم کرد: استخراج ویژگی و تشخیص حالت.
2.2.1. استخراج ویژگی
در حال حاضر گوشی های هوشمند به قطعات حسگر متعددی مجهز هستند. خروجی داده از این اجزای اندازه گیری می تواند تا حد زیادی رفتارهای مختلف کاربران را منعکس کند. با این حال، داده های گسسته برای تجزیه و تحلیل ویژگی های رفتاری عابران پیاده کافی نیست، بنابراین باید از یک پنجره کشویی برای برش داده ها و استخراج ویژگی های هر پنجره استفاده کنیم. اندازه پنجره 128 نمونه (2.5 ثانیه) با همپوشانی 50 درصد تعیین شد. فرکانس سنسورها fس50 هرتز است.
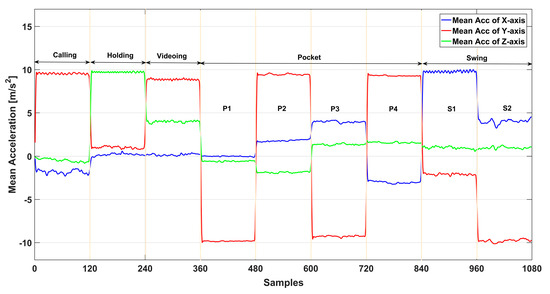
شکل 4 تغییر مقادیر میانگین شتاب سه محور را نشان می دهد که از طریق یک پنجره کشویی تحت پنج حالت تماس، نگه داشتن، فیلمبرداری، جیبی و نوسان استخراج شده است و مدت زمان هر حالت 40 ثانیه بود. می توان دریافت که به دلیل روابط فضایی متفاوت سیستم مختصات تجهیزات، شتاب سه محوری تجهیزات تفاوت های مشخصه واضحی را نشان می دهد. بنابراین می توان از اطلاعات میانگین شتاب لحظه ای کاربران برای طبقه بندی نگرش دستگاه استفاده کرد و فرمول محاسبه آن به شرح زیر است:
جایی که مان_آججایکس،y،zکمقدار میانگین شتاب سه محور k امین پنجره کشویی است و دبلیومنnاسمنzهاندازه پنجره کشویی است.
2.2.2. نظارت و طبقه بندی حالت
متأسفانه، بار محاسباتی قابل توجهی در ارتباط با پردازش مداوم داده های حسگر وجود دارد، به ویژه در تحقیقات قبلی [ 38 ، 39 ، 40 ، 41 ] در مورد تشخیص حالت عابر پیاده. پردازندههای مدرن گوشیهای هوشمند میتوانند پردازشهای لازم را در زمان واقعی انجام دهند، اما فقط به قیمت مصرف انرژی بالا و کاهش عمر باتری [ 42 ]. گو و همکاران [ 41 ] هفت نوع حالت حرکتی را تعریف کرد و شش طبقهبندی کننده رایج را با هم مقایسه کرد. علاوه بر این، تاریخچه حالت حرکت و ویژگیهای حرکت افراد برای بهبود دقت طبقهبندی مورد استفاده قرار گرفت. در [ 38]، طبقهبندیکنندههای متعدد (مانند DT، تجزیه و تحلیل تفکیک خطی، K-نزدیکترین همسایه، سادهواره، ماشین بردار پشتیبان، و ماشین بردار پشتیبان حداقل مربعات) برای تشخیص حالتهای گام انسان و حالتهای تلفن ایجاد شدند. دقت طبقه بندی از 80.3٪ تا 97.8٪ متغیر بود. در [ 40 ]، شش نوع حرکت رایج در ناوبری داخلی تعریف شد و یک شبکه عصبی مصنوعی برای طبقهبندی کننده استفاده شد.
با این حال، تلفن های هوشمند معمولاً برای مدت طولانی در جیب یا در دست نگه داشته می شوند و به طور مداوم داده ها را برای تشخیص وضعیت دستگاه استخراج می کنند که نه تنها حافظه زیادی را مصرف می کند بلکه عمر باتری را نیز بسیار کاهش می دهد. روشهای طبقهبندی، که حالتها را با استخراج ویژگیهای آماری دادههای حسگر پس از هر نمونه طبقهبندی میکنند، معمولاً در بیشتر ادبیات یافت میشوند. در FSM، یک انتقال حالت زمانی رخ می دهد که یک رویداد جدید (یک وضعیت) شناسایی شود زیرا دامنه آن با آستانه از پیش تعریف شده مطابقت دارد. بنابراین، الگوریتم FSM میتواند به موقع به سوئیچ حالت پاسخ دهد و بار محاسباتی قابل توجه مرتبط با پردازش دادههای حسگر پیوسته را کاهش دهد. DT یک طبقه بندی کننده ناپارامتری با ساختار درختی است که می تواند مستقیماً ویژگی های سیگنال ها را منعکس کند.30 ]. بنابراین، در این مطالعه، روش FSM و الگوریتم DT برای انجام نظارت بلادرنگ و تشخیص حالت تلفن با هم ترکیب شدهاند. این روش از یک الگوریتم DT برای شناسایی حالت فعلی کاربر استفاده می کند، زمانی که الگوریتم FSM تغییر در وضعیت دستگاه را تشخیص دهد. FSM پیشنهادی دارای شش حالت است که تمام حالتها و انتقال بین حالتها را پوشش میدهد، همانطور که در بخش تشخیص حالت شکل 1 نشان داده شده است. حالتهای اصلی گوشی هوشمند (نگهداری، فیلمبرداری، تماس، چرخش و جیب) با حالت TRANS پل میشوند و حالت اولیه روی نگهداشتن تنظیم میشود (به طور منطقی فرض میکنیم که ناوبری همیشه از طریق تعامل نگهداشتن روشن است). هنگامی که سوئیچ شناسایی نشده است، دستگاه همیشه در وضعیت اصلی فعلی است. در غیر این صورت، به حالت TRANS تغییر خواهد کرد.
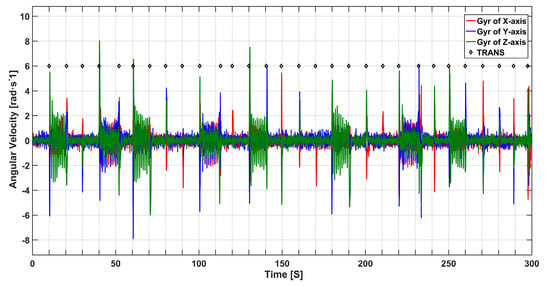
در شکل 5 ، یک کاربر آزمایشی در یک خط مستقیم راه می رود و هر 10 ثانیه حالت تجهیزات را تغییر می دهد. کل مدت زمان آزمون 300 ثانیه بود. مشخص شد که وقتی موقعیت دستگاه به سرعت تغییر میکند، دادههای سرعت زاویهای دستگاه تمایل به ارائه ویژگیهای واضح دارند و زمانی که تلفن در حالتهای اصلی مختلف قرار دارد، آستانه سرعت زاویهای هر محور که TRANS را تحریک میکند. حالت نیز متفاوت است
همانطور که در شکل 5 نشان داده شده است، برای برگزاری (0، 50، 90، 110، 140، 170، 200، 260، 300 ثانیه)، فیلمبرداری (20، 80، 120، 160، 210، 240، 280 ثانیه)، و حالت های تماس (30، 70) ، 150، 190، 230، 270، 290 ثانیه) جهت و موقعیت تلفن همراه نسبتاً ثابت است، بنابراین سرعت زاویه ای دستگاه در این حالت نسبتاً کم است. برای حالتهای نوسان (10، 60، 130، 180، 250 ثانیه) و جیبی (40، 100، 220 ثانیه)، موقعیت نسبی تلفن همراه ثابت نیست، بنابراین منحنی سرعت زاویهای نوسانات بزرگ و مشخصی را نشان میدهد. تناوب، زیرا دستگاه معمولاً حول محور z دستگاه به طور دوره ای در طول حالت نوسان می چرخد. برای حالت نگهداشتن، وقتی حالت فعلی به حالت فیلمبرداری (120 ثانیه، 210 ثانیه) تغییر میکند، دستگاه تقریباً 90 درجه حول محور x در جهت عقربههای ساعت میچرخد و محور y و محور z نسبتاً پایدار هستند. هنگام تغییر از حالت نگه داشتن به حالت تماس (150 ثانیه، 270 ثانیه)، دستگاه در جهت عقربه های ساعت حدود 90 درجه حول محور z و محور x می چرخد و محور y نسبتاً پایدار است. برعکس، هنگامی که دستگاه به حالت نوسان (60 ثانیه، 180 ثانیه) سوئیچ میکند، محور x نسبتاً پایدار است و به حالت جیبی (100 ثانیه) میرود و هر سه محور فعال هستند و سرعت زاویهای نوسان زیادی دارد. حرکت انتقالی با تغییر جهت تلفن مشخص می شود و از طریق نظارت بر نرخ چرخش زاویه ای تلفن در محور x، محور y و محور z توسط آستانه تشخیص داده می شود. شرایط حرکت TRANS با توجه به وضعیت فعلی FSM به طور متفاوتی برآورده می شود. آستانه نرخ چرخش نظارت شده در هر حالت نیز در جدول آورده شده است دستگاه در جهت عقربه های ساعت حدود 90 درجه حول محور z و محور x می چرخد و محور y نسبتاً پایدار است. برعکس، هنگامی که دستگاه به حالت نوسان (60 ثانیه، 180 ثانیه) سوئیچ میکند، محور x نسبتاً پایدار است و به حالت جیبی (100 ثانیه) میرود و هر سه محور فعال هستند و سرعت زاویهای نوسان زیادی دارد. حرکت انتقالی با تغییر جهت تلفن مشخص می شود و از طریق نظارت بر نرخ چرخش زاویه ای تلفن در محور x، محور y و محور z توسط آستانه تشخیص داده می شود. شرایط حرکت TRANS با توجه به وضعیت فعلی FSM به طور متفاوتی برآورده می شود. آستانه نرخ چرخش نظارت شده در هر حالت نیز در جدول آورده شده است دستگاه در جهت عقربه های ساعت حدود 90 درجه حول محور z و محور x می چرخد و محور y نسبتاً پایدار است. برعکس، هنگامی که دستگاه به حالت نوسان (60 ثانیه، 180 ثانیه) سوئیچ میکند، محور x نسبتاً پایدار است و به حالت جیبی (100 ثانیه) میرود و هر سه محور فعال هستند و سرعت زاویهای نوسان زیادی دارد. حرکت انتقالی با تغییر جهت تلفن مشخص می شود و از طریق نظارت بر نرخ چرخش زاویه ای تلفن در محور x، محور y و محور z توسط آستانه تشخیص داده می شود. شرایط حرکت TRANS با توجه به وضعیت فعلی FSM به طور متفاوتی برآورده می شود. آستانه نرخ چرخش نظارت شده در هر حالت نیز در جدول آورده شده است محور x نسبتاً پایدار است و به حالت جیبی (100 ثانیه) تغییر می کند، و هر سه محور فعال هستند و سرعت زاویه ای به شدت در نوسان است. حرکت انتقالی با تغییر جهت تلفن مشخص می شود و از طریق نظارت بر نرخ چرخش زاویه ای تلفن در محور x، محور y و محور z توسط آستانه تشخیص داده می شود. شرایط حرکت TRANS با توجه به وضعیت فعلی FSM به طور متفاوتی برآورده می شود. آستانه نرخ چرخش نظارت شده در هر حالت نیز در جدول آورده شده است محور x نسبتاً پایدار است و به حالت جیبی (100 ثانیه) تغییر می کند، و هر سه محور فعال هستند و سرعت زاویه ای به شدت در نوسان است. حرکت انتقالی با تغییر جهت تلفن مشخص می شود و از طریق نظارت بر نرخ چرخش زاویه ای تلفن در محور x، محور y و محور z توسط آستانه تشخیص داده می شود. شرایط حرکت TRANS با توجه به وضعیت فعلی FSM به طور متفاوتی برآورده می شود. آستانه نرخ چرخش نظارت شده در هر حالت نیز در جدول آورده شده است شرایط حرکت TRANS با توجه به وضعیت فعلی FSM به طور متفاوتی برآورده می شود. آستانه نرخ چرخش نظارت شده در هر حالت نیز در جدول آورده شده است شرایط حرکت TRANS با توجه به وضعیت فعلی FSM به طور متفاوتی برآورده می شود. آستانه نرخ چرخش نظارت شده در هر حالت نیز در جدول آورده شده استجدول 1 که در آن rایکس،y،z”با فرمول محاسبه شد: rایکس،y،z”=آبس(rایکس،y،z). بنابراین، اطلاعات سرعت زاویه ای دستگاه که توسط ژیروسکوپ به دست می آید، نه تنها می تواند به عنوان وضعیت ماشه حالت TRANS استفاده شود، بلکه می تواند اطلاعات حالت خشن (RM) را برای سیستم به دست آورد.
از تجربه بهدستآمده از آزمایشهای ما ( برای جزئیات به بخش 3.2 مراجعه کنید)، میدانیم که ویژگیهای سرعت زاویهای ممکن است در تغییر حالتهای مختلف مشابه باشند، مانند تغییر از حالت فیلمبرداری به حالت نوسانی (130 ثانیه، 250 ثانیه) و حالت جیبی (220 ثانیه). بنابراین، زمانی که سیستم حالت TRANS را راهاندازی میکند، الگوریتم پیشنهادی در این مقاله به طور خودکار دادههای شتاب پنجره کشویی بعدی را استخراج میکند و سپس از الگوریتم DT برای تشخیص اطلاعات حالت (DT Mode) استفاده میکند. در این مدت حالت کاربر به طور موقت RM در نظر گرفته می شود. نمودار جریان الگوریتم در شکل 6 نشان داده شده است .
2.3. تشخیص گام و تخمین طول گام
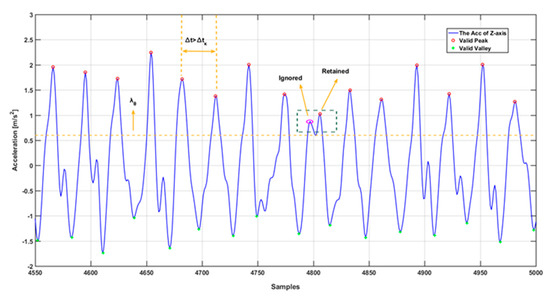
شکل 7 شتاب محور z را در حالت نگه داشتن نشان می دهد. می بینیم که شتاب بدن انسان در هنگام راه رفتن کاربر دارای ویژگی های موج سینوسی است، بنابراین می توان با تشخیص تاج یا دره، قدم عابر پیاده را تشخیص داد. با این حال، تغییر در حالت گوشی تاثیر زیادی بر اندازه گیری شتاب در سه محور خواهد داشت. شتاب در جهت عمودی به طور کلی می تواند ویژگی های پله عابران پیاده را با وضوح بیشتری منعکس کند. بنابراین، محور جهت گیری عمودی شتاب به عنوان هنجار برای تشخیص گام انتخاب شد. در این مطالعه، یک روش تشخیص تاج دره محدود چند شرطی برای تشخیص گام استفاده شد. ما دقت شمارش گامها را در حالتهای مختلف با قرار دادن محدودیتهایی روی ویژگیهای گام، یعنی شباهت [43 ]، آستانه های زمانی Δتیک، و آستانه های اوج λθ. برای تشخیص دقیق مراحل، پارامترهای الگوریتم برای حالت های مختلف تلفن تنظیم شد [ 43 ، 44 ].
طول گام از فردی به فرد دیگر متفاوت است و تحت تاثیر سن، جنسیت، قد، سرعت راه رفتن و عوامل دیگر است [ 45 ]. مدلهای تخمین زیادی پیشنهاد شدهاند و بیشتر مدلها با استفاده از دادههای شتابسنج، از جمله مدل خطی، مدل غیرخطی، و مدل شبکه عصبی مصنوعی [ 30 ] تولید شدهاند. در این تحقیق از الگوریتم واینبرگ [ 46 ] برای تخمین طول گام عابر پیاده استفاده شد و فرمول محاسبه آن به شرح زیر است:
جایی که آمترآایکسو آمترمنnمقادیر حداکثر و حداقل شتاب یک مرحلهای هستند که به ترتیب با استفاده از الگوریتم تشخیص گام به دست میآیند. ثابت k پارامتر شخصی شده متناسب با هر خط رگرسیون است.
2.4. برآورد سرفصل
هنگام استفاده از تلفن هوشمند برای PDR، در حالی که مسیر عابر پیاده ثابت می ماند، ممکن است عنوان تلفن دائما تغییر کند. بنابراین، روشی که تنها از سرفصل تجهیزات برای جایگزینی جهت عابر پیاده استفاده می کند یا جبران سرفصل [ 28 ] را برای انطباق با وضعیت واقعی دشوار است.
شتاب سنج تعبیه شده در تلفن همراه می تواند داده های شتاب را تحت سیستم مختصات بدنه دستگاه بدست آورد. روش انتگرال دوگانه را می توان برای محاسبه راحت جابجایی کاربر از اندازه گیری شتاب سنج خطی استفاده کرد و عنوان را نیز می توان با تغییر مکان محاسبه کرد. با این حال، روش ادغام دوگانه ممکن است تجمع خطاهای موقعیت یابی را تشدید کند، که تنها در چند ثانیه به سطح متر می رسد [ 35 ]. پی و همکاران [ 1] روشی را برای به دست آوردن بردار سرعت تحت سیستم مختصات مرجع کاربر با استفاده از یک انتگرال شتاب افقی دو مرحله ای برای محاسبه جهت گیری پیشنهاد کرد، که از محدودیت نگرش در برنامه سنتی PDR عبور کرد و یک تخمین عنوان را به دست آورد که عملکرد قوی داشت. در این مطالعه، یک روش محاسبه سرفصل بهبودیافته برای محاسبه هدایت جهانی یک عابر پیاده در مرحله خطی با معرفی اطلاعات ژیروسکوپ پیشنهاد شدهاست و سپس میتوان با کمک یک الگوریتم فیلتر ذرات بر اساس تطبیق نقشه، جهت گیری همجوشی قوی را به دست آورد.
2.4.1. سرفصل جهانی
سیستم مرجع نگرش و سرفصل (AHRS) یک سیستم مرجع نگرش است که از استحکام قوی و دقت بالایی برخوردار است که به دلیل ادغام دادههای شتابسنج، ژیروسکوپ و مغناطیسسنج است. در این مطالعه، الگوریتم Madwick-AHRS [ 47 ] برای به دست آوردن نگرش دستگاه نگه داشته شده توسط کاربر در فرآیند راه رفتن در زمان واقعی و سپس ماتریس تبدیل اتخاذ شده است. آربrاز سیستم مختصات بدن تا سیستم مختصات مرجع را می توان با نگرش دستگاه محاسبه کرد. بنابراین، شتاب افقی کاربر را در سیستم مختصات مرجع به صورت زیر بدست می آوریم:
جایی که آبمن=(آب،ایکسمن،آب،yمن،آب،zمن)و آrمن=(آr،ایکسمن،آr،yمن،آr،zمن)نشان دهنده داده های شتاب کاربر به ترتیب در سیستم مختصات بدن و سیستم مختصات مرجع. عنوان را می توان با محاسبه کرد آr،ایکسمن،آr،yمن:
در واقع به دلیل کیفیت پایین حسگر تلفن همراه، محدودیت توانایی محاسباتی و تکان دادن بدن کاربر در حین راه رفتن، بدست آوردن عنوان دقیق از معادله (4) مشکل است. بنابراین، اطلاعات مرحله به دست آمده توسط الگوریتم تشخیص گام را می توان برای به دست آوردن اطلاعات عنوان در یک مرحله استفاده کرد:
جایی که θاستیهپjعنوان گام به گام عابر پیاده در است jگام؛ Vrاستیهپjبردار سرعت به دست آمده توسط انتگرال شتاب افقی است و فرمول محاسبه آن در رابطه (6) نشان داده شده است. استیهپjو استیهپj+1نشان دهنده زمان j-تیساعتو (j+1)-تیساعتمرحله به دست آمده توسط الگوریتم تشخیص گام، به ترتیب.
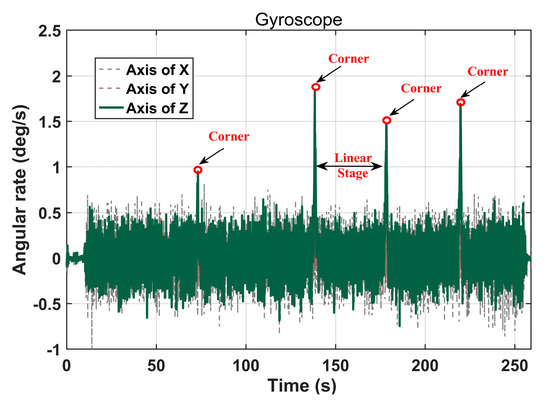
در محیط های سرپوشیده به دلیل محدودیت ساختمان ها، تصادفی بودن مسیر عابر پیاده بسیار کاهش می یابد. از اطلاعات سرعت زاویه ای محور خاص دستگاه در حالت های مختلف می توان برای تشخیص ویژگی های حرکتی کاربران مانند چرخش یا مستقیم رفتن استفاده کرد. در این مطالعه، محور جهت گیری عمودی ژیروسکوپ را به عنوان معیار تشخیص گوشه انتخاب می کنیم. شکل 8 تغییر در سرعت زاویه ای کاربر را در جهت حرکت در حالت نگه داشتن نشان می دهد و چهار مورد وجود دارد که نشان دهنده چهار چرخش کاربر در طول راه رفتن است. سپس، مسیر عابر پیاده را می توان به چند مرحله خطی تقسیم کرد (فرض می شود که کاربر در یک خط تقریبا مستقیم راه می رود).
تشخیص ناهنجاری چارکی معمولاً از استحکام خوبی برخوردار است. بنابراین، الگوریتم تشخیص بیرونی چارک را می توان برای به دست آوردن اطلاعات چرخش عابران پیاده استفاده کرد. سپس، عنوان بلادرنگ کاربر را می توان با محاسبه معکوس بردار سرعت به دست آمده توسط انتگرال شتاب افقی در مرحله خطی به دست آورد. به این ترتیب، عنوان عابران پیاده را می توان به طور مداوم در حالی که عابر پیاده راه می رود، اصلاح کرد.
جایی که θاستیهپjعنوان جهانی است jگام، و استیهپکآخرین باری است که کاربر می چرخد.
2.4.2. برآورد سرفصل و محلیسازی با کمک PF و تطبیق نقشه
با جستجوی گروهی از نمونه ها در فضای حالت (به نام ذرات)، PF تابع چگالی احتمال را برای به دست آوردن حداقل برآورد واریانس حالت تقریبی می کند:
جایی که پ(ایکسک|z1:ک)احتمال پسین است، δ(ایکسک-ایکسکمن)تابع دیراک است. wکمنوزن ذره i را نشان می دهد.ایکسکاندازه گیری ها را نشان می دهد (مقدار مختصات محاسبه شده با عنوان و طول گام با استفاده از الگوریتم های تشخیص راه رفتن). و ایکسکمنتخمین قبلی ذره i را در زمان k نشان می دهد که می تواند از تبدیل زیر به دست آید [ 48 ]:
جایی که vایکسمن(ک)و vyمن(ک)مقادیر سرعت به ترتیب در جهت شمال و شرق هستند. Δتیفاصله زمانی دو مرحله ای است که توسط الگوریتم تشخیص راه رفتن به دست می آید. آایکس(ک)و آy(ک)به ترتیب شتاب در جهت شمال و شرق هستند که از توزیع نرمال پیروی می کنند. ن∼(0،σ2).
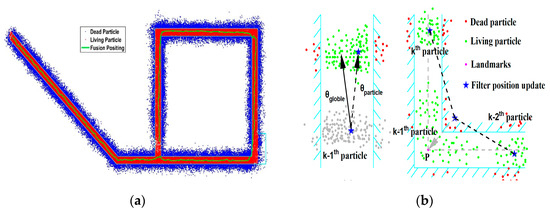
مزیت PF این است که برای حل مسائل غیر گاوسی غیرخطی و نویز مناسب است، اما مشکلاتی مانند انتقال نامناسب ذرات دارد (به این معنی که ذره می تواند به مناطق غیرقابل دسترس یا از طریق دیوار به فضای داخلی دیگری منتقل شود. ). نقشههای ساختمانی معمولاً حاوی مقدار زیادی اطلاعات مفید هستند که نه تنها میتوانند از انتقال ذرات جلوگیری کنند، بلکه میتوانند به طور مؤثری تعداد ذرات نامعتبر را کاهش دهند و اطلاعات مکان قابل اعتمادتری را ارائه دهند. همانطور که در شکل 9 نشان داده شده است ، زمانی که ذره به ناحیه غیرقابل دسترسی منتقل می شود، وزن آن 0 تنظیم می شود. برعکس، سمت راست منحنی زنگی توزیع گاوسی [ 49 ]] می تواند برای محاسبه وزن ذره برای به دست آوردن یک مسیر واقعی تر استفاده شود:
پس از به روز رسانی وزن، ذرات باید دوباره غربال شوند. فرمول از ωمن(ک)=ωمن(ک)/∑من=1nωمن(ک)برای نرمال کردن وزن مختصات k مورد استفاده قرار گرفت. غربالگری ذرات از روش نمونه گیری مجدد تصادفی برای حفظ ذرات با وزن بالا تا حد امکان و حذف ذرات کم وزن استفاده کرد. در آخر، به منظور به حداقل رساندن نوسانات مسیر، موقعیت فعلی سیستم را می توان به شرح زیر به روز کرد:
جایی که ΔEgلoبآلو Δنgلoبآلجابجایی عابر پیاده در جهت شرق و شمال است که با عنوان جهانی محاسبه می شود. بنابراین با مقایسه جابجایی ها می توان جهت اصلی حرکت عابر پیاده را تعیین کرد. برای مشکل عبور مسیر از دیوار در گوشه، همانطور که در شکل 9 ب نشان داده شده است، از ویژگی های قابل توجه ژیروسکوپ در هنگام پیچیدن برای درک نزدیکترین اطلاعات نقطه عطف استفاده شد (به عنوان مثال، نقطه “P” نشان داده شده در شکل 9 ب) برای تصحیح مسیر. بر اساس لبه برش مسیر، میتوانیم از مقدار تصحیح هر مرحله برای اصلاح مسیر استفاده کنیم و از عبور مسیر از منطقه صعب العبور اجتناب کنیم [ 50 ].
در این مرحله، زاویه سمت پله را می توان با توجه به موقعیت احتمالی که با فیلتر کردن تعیین می شود محاسبه کرد:
مسیر تعیین شده توسط این روش در اکثر موقعیت ها تقریبی به جهت واقعی عابر پیاده است، اما هنوز مشکلات نوسانات نسبتاً زیادی در گوشه ها یا چند نقطه وجود دارد. بنابراین، یک روش سرفصل همجوشی قوی را می توان به صورت زیر بدست آورد:
جایی که θgلoبآلو θستیهپwمنسهنشان دهنده عنوان محاسبه شده به ترتیب با روش های جهانی و گام به گام. ρ1و ρ2به ترتیب وزن محاسبه سرفصل همجوشی در هر دو مورد است که می تواند با توجه به وضعیت واقعی برای بهبود توانایی تخمین دوره مدل تنظیم شود. در این مطالعه، ρ1روی 2/3 تنظیم شده است. ρ2در حالت های نگه داشتن، فیلمبرداری و تماس روی 1/3 تنظیم شده است. در مورد حالت چرخش و جیب، تلفن هنگام راه رفتن عابر پیاده ناپایدار است، بنابراین ρ2روی 2/3 تنظیم شده است. δآستانه انحراف عنوان است که در این مطالعه روی 15 درجه تنظیم شده است. د1نشان دهنده تفاوت بین θپآrتیمنجلهو θgلoبآل، و د2نشان دهنده تفاوت بین θپآrتیمنجلهو θستیهپwمنسه.
3. نتایج و بحث
3.1. شرایط آزمایشی
در این بخش، آزمایشها برای تأیید عملکرد روشهای پیشنهادی تشخیص حالت و محلیسازی داخلی ارائه میشوند. گوشی های هواوی میت 20 پرو، شیائومی نوت 3، سامسونگ اس 10 و وان پلاس 7 پرو به عنوان پلتفرم تست برای تست سیستم مورد استفاده قرار گرفتند.
در آزمایش مانیتورینگ و طبقهبندی حالت، هفت مرد و سه داوطلب زن با قدهای مختلف، چهار دستگاه را برای شرکت در جمعآوری دادهها حمل کردند. شرکت کنندگان با حالت های مختلف حرکت کردند و هر حالت ضبط شد. اندازه پنجره برای استخراج ویژگی 128 نمونه (2.5 ثانیه) با 50 درصد همپوشانی تعیین شد. پس از غربالگری و پردازش، 12340 مجموعه داده نمونه برای ساخت مدل درخت تصمیم حفظ شد. به منظور ارزیابی عملکرد الگوریتم نظارت و تشخیص حالت پیشنهادی در صحنه های واقعی، 14 داوطلب با قد و سنین مختلف چهار دستگاه را حمل کردند و به آنها آموزش داده شد که به طور عادی در هر دو محیط داخلی و خارجی راه بروند و حالت تجهیزات را آزادانه برای تکمیل جمع آوری داده ها تغییر دهند. .
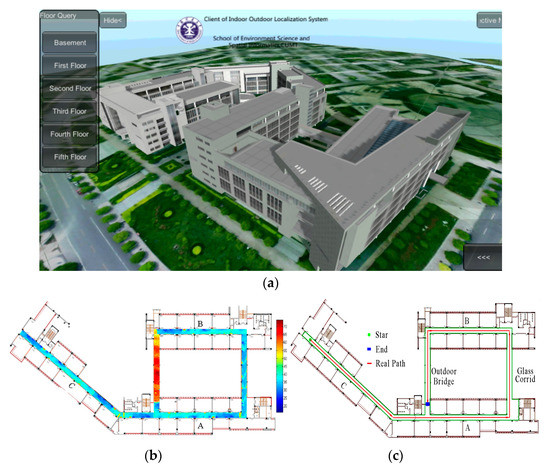
سایتهای آزمایشی بومیسازی در دو صحنه داخلی قرار داشتند: یک سایت آزمایشی موقعیتیابی داخلی طبقه سوم و یک گاراژ پارکینگ زیرزمینی، در دانشکده علوم محیطی و انفورماتیک فضایی، دانشگاه معدن و فناوری چین. شکل 10 مکان آزمایشی موقعیت یابی داخلی را در طبقه سوم نشان می دهد که طول کلی آن تقریباً 300 متر و مساحت تقریباً 670 متر مربع است . منطقه آزمایش یک محیط آشفته میدان مغناطیسی معمولی به دلیل گیرندههای GNSS، رایانهها، بلوتوث و ماژولهای فرستنده WiFi، ساختار بتنی و غیره است (همانطور که در شکل 10 نشان داده شده است.ب). در آزمایش، عابر پیاده از انتهای غربی منطقه C شروع شد و از طریق منطقه A و یک راهرو شیشه ای به سمت غربی ترین انتهای منطقه B حرکت کرد و در نهایت از طریق یک پل در فضای باز به منطقه A بازگشت. در طی این فرآیند، عابر پیاده در طول مسیر مشخص شده با پنج حالت راه رفت. در آخر، ما آزمایشهای چالش برانگیزی را در یک پارکینگ زیرزمینی انجام دادیم تا عملکرد راهحل پیشنهادی را با تغییر علتی حالت حمل گوشی هوشمند تأیید کنیم.
3.2. آزمایش مانیتورینگ و طبقهبندی حالت
الگوریتم C4.5 یک الگوریتم کلاسیک برای درخت تصمیم مولد است که توسعه و بهینه سازی الگوریتم ID3 است. این می تواند با انواع ویژگی های گسسته و پیوسته برخورد کند و ویژگی تقسیم را از طریق نرخ بهره اطلاعات انتخاب کند. بنابراین، در این مطالعه از الگوریتم C4.5 برای تولید مدل درخت تصمیم استفاده شد. در طول ایجاد مدل طبقهبندی، از روش اعتبارسنجی متقاطع 10 برابری برای آزمایش دقت مدل طبقهبندی استفاده شد. به عبارت دیگر داده ها به 10 قسمت تقسیم شدند که از این میان 9 قسمت به عنوان داده آموزشی و 1 قسمت به عنوان داده آزمون در نظر گرفته شد.
جدول 2 ماتریس سردرگمی روش طبقه بندی درخت تصمیم را نشان می دهد. نتایج نشان میدهد که در طبقهبندی حالتهای نگهداشتن، فراخوانی و نوسانی، الگوریتم پیشنهادی به دقت بالایی (بیش از 97 درصد) دست یافت، در حالی که در دو حالت ویدئو و جیبی، احتمال قضاوت نادرست کمی وجود دارد (<2). ٪.
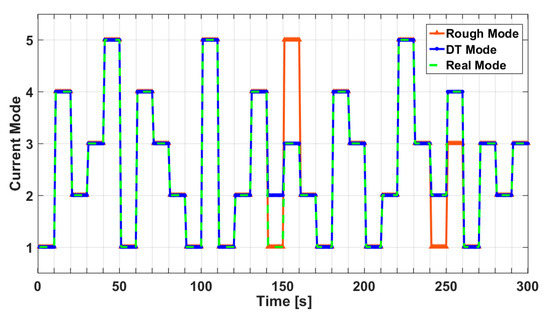
شکل 11 نتایج طبقهبندی صحنه توصیف شده در شکل 5 را توسط مدل طبقهبندی FSM + DT در یک محیط بیرونی نشان میدهد، که در آن 1 تا 5، به ترتیب، پنج حالت را نشان میدهند: نگهداری، ویدیو، تماس، نوسان و جیب. مشاهده می شود که در 150 ثانیه، 240 و 260 ثانیه، به دلیل شباهت عملکرد سوئیچینگ حالت های مختلف، تمایز حداکثر سرعت زاویه ای چرخش سه محور نسبتاً کم بود که عملکرد FSM را به شدت محدود کرد. الگوریتم بنابراین، تشخیص موثر حالت دستگاه تنها با استفاده از اطلاعات الگوی خشن ارائه شده توسط FSM دشوار است.
به منظور ارزیابی عملکرد الگوریتم نظارت و تشخیص حالت پیشنهادی در صحنه های واقعی. در مجموع، در حدود سه ساعت، 326 نمونه تغییر حالت معتبر توسط 14 داوطلب با قدها و سنین مختلف جمع آوری شد. در طول این فرآیند، عابر پیاده به طور معمول در هر دو محیط داخلی و خارجی راه می رود و حالت تجهیزات را آزادانه تغییر می دهد. جدول 3نتایج طبقه بندی تشخیص حالت شامل 07/3 درصد نمونه های از دست رفته را نشان می دهد. پس از تجزیه و تحلیل، متوجه شدیم که در حالت نگهداشتن، دستگاه به آرامی حول محور x میچرخد تا به حالت فیلمبرداری تغییر کند، که در طی آن محور y و محور z نسبتاً پایدار هستند. در طی فرآیند تعویض، سرعت زاویهای محور x در برخی از نمونهها (بهویژه دادههای جمعآوریشده توسط داوطلبان زن) بسیار کم بود و از آستانه سرعت زاویهای تعیینشده توسط الگوریتم FSM فراتر نمیرفت و در نتیجه برخی از حالتهای فیلمبرداری شکست میخورد. تشخیص
اگرچه احتمال کمی برای قضاوت نادرست و تشخیص گم شدن وجود دارد، الگوریتم پیشنهادی به نرخ کلی تشخیص حالت 93.25% دست یافت که در این میان حالت نگهداری به دقت طبقه بندی بالاتری دست یافت، با نرخ دقت بیش از 95٪ به دلیل ویژگی های منحصر به فرد گرانش. شتاب. ما همچنین به نرخ تشخیص الگوی 90.07٪ در حالت جیب دست یافتیم، حتی اگر برخی از شرکتکنندگان لباسهای گشادتری به تن داشتند. تیان و همکاران [ 51] یک الگوریتم نظارت و تشخیص را پیشنهاد کرد که فقط از FSM برای درک حالت نگه داشتن، چرخش و جیب استفاده می کند. در مقایسه با FSM، الگوریتم FSM+DT نه تنها دستههای حالتهای دستگاه را گسترش میدهد، بلکه دقت شناسایی حالتهای انتقال و حالتهای دستگاه را نیز با افزایش متوسط 3.03 درصدی در نرخ تشخیص و کاهش 4.42 درصدی بهبود میبخشد. در نرخ تشخیص از دست رفته
3.3. آزمایش بومی سازی
همانطور که در شکل 10 نشان داده شده است، سایت آزمایشی بومی سازی در یک ساختمان اداری قرار داشت . شکل 12 a,b نتایج تخمین عنوان را در حالت های نگهدارنده و جیبی برای عنوان گام به گام، عنوان سراسری و عنوان فیوژن بر اساس فیلتر ذرات و کمک تطبیق نقشه نشان می دهد. نتایج نشان می دهد که سرفصل های گام به گام و سراسری دارای انحرافات زیادی در مرحله اولیه موقعیت یابی (در 20 مرحله) هستند. با گذشت زمان، نتایج سرفصل جهانی کمترین نوسان را دارند، که تاثیر تکان دادن بدن و نوسان تجهیزات را بر تخمین عنوان کاهش میدهد. شکل 12c,d توزیع تجمعی خطای تخمین عنوان مربوطه را نشان می دهد. میتوانیم دریافتیم که احتمال خطای عنوان همجوشی بهتر از 4 درجه بیش از 85٪ در هر دو حالت نگهدارنده و جیبی است که عملکرد بهتری نسبت به دو الگوریتم تخمین عنوان دیگر داشت. در حالت نگهداشتن، 50 درصد خطای تخمین سرفصل برای سرفصلهای همجوشی، گامبهگام، و عنوان سراسری به ترتیب 1.3 درجه، 2.8 درجه و 3.8 درجه است. 75% خطاهای تخمین عنوان به ترتیب 2.8 درجه، 5.7 درجه و 8.6 درجه است. در حالت جیبی، خطاهای تخمینی 50 درصدی عنوان برای عنوان ترکیبی، گام به گام و عنوان سراسری به ترتیب 0.9 درجه، 1.9 درجه و 2.0 درجه است. 75% خطاهای برآورد عنوان به ترتیب 1.7 درجه، 3.7 درجه و 2.8 درجه است.
میانگین خطا و انحراف استاندارد در جدول 4 قوی ترین و دقیق ترین نتایج تخمین سرفصل عنوان همجوشی را نشان می دهد. در مقایسه با عنوان گام به گام، پایداری به طور متوسط 32.78 درصد، میانگین دقت با حداقل 44.79 درصد افزایش یافته است، و حداکثر 67.76 درصد افزایش یافته است.
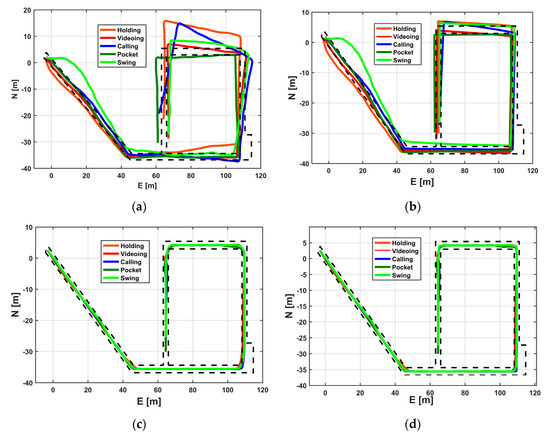
شکل 13 نتایج مکان یابی روش های مختلف را در چند حالت نشان می دهد. در الگوریتم فیلتر ذرات، تعداد ذرات روی 200 تنظیم شده است. شکل 13 a نشان می دهد که مسیر موقعیت محاسبه شده با عنوان گام به گام، انحراف آشکار از مسیر واقعی را نشان می دهد، و گرایش در طول زمان بدتر می شود. همراه با مرحله خطی تاریخی، مسیر موقعیت محاسبه شده توسط عنوان جهانی در شکل 13 ب نشان داده شده است. سرعت انحراف مسیر بسیار محدود است و تجمع خطا به طور قابل توجهی کاهش می یابد. با این حال، برای حالت نگه داشتن و چرخش، 50 مرحله اول همه انحرافات جزئی را به دلیل تکان دادن تجهیزات نشان می دهند. مسیر مکان محلول سرفصل همجوشی در شکل 13 نشان داده شده استج می بینیم که مسیر نه تنها در راهرو محدود است، بلکه به دلیل اطلاعات مربوط به مرز نقشه، که تا حد زیادی تصادفی بودن ذرات را در الگوریتم فیلترینگ محدود می کند، تقریباً با خط مرکزی راهرو مطابقت دارد. خطای تجمعی و نوسانات اساساً حذف می شوند، اما مسیر همچنان از دیوار در گوشه عبور می کند. شکل 13 d مسیر موقعیت را نشان می دهد که توسط الگوریتم درک نقطه عطف زمینی کمک می کند، که به طور موثر مسیر عبور از دیوار ناشی از الگوریتم فیلتر ذرات را حل می کند.
علاوه بر این، میانگین و حداکثر خطای موقعیت یابی را در حالت های مختلف ارزیابی کردیم و نتایج در جدول 5 نشان داده شده است.. ما میتوانیم متوجه شویم که دقت مسیر حرکت سربالا و تیتر فیوژن کمی بدتر از حرکت گامبهگام در حالت فیلمبرداری است، اما در چهار حالت پیامک، تماس، نوسان و جیبی، بهتر از مرحلهای است. عنوان عاقلانه در میان آنها، حداکثر خطای مسیر عابر پیاده محاسبه شده با سرفصل فیوزینگ به طور متوسط 47.67٪ کاهش یافت و میانگین دقت موقعیت یابی 1.34 متر در حداقل و 4.13 متر در حداکثر بهبود یافت. از بیانیه بالا می توان دریافت که الگوریتم عنوان فیوژن پیشنهادی در این مطالعه نه تنها دقت موقعیت یابی و استحکام را در حالت های مختلف بهبود می بخشد، بلکه تجمع خطاها را تا حدی محدود می کند.
در آخر، آزمایشهای چالش برانگیزی را در یک پارکینگ زیرزمینی با مساحت 3963 متر مربع با استفاده از SAMSUNG Galaxy S10 (Android 9.0) انجام دادیم تا عملکرد روشهای پیشنهادی را در حالتهای استفاده مختلف تأیید کنیم. میدان مغناطیسی در این ناحیه همچنان توسط ستون های بتنی، وسایل نقلیه، سیگنال های رادیویی و عوامل دیگر مختل می شود. یک داوطلب در امتداد مسیر مشخص شده قدم زد در حالی که حالت حمل گوشی هوشمند در بین پنج حالت حمل همانطور که در شکل 14 نشان داده شده است تغییر کرده است. نتایج نشان می دهد که میانگین خطای محلی سازی با وجود محیط بزرگ کمتر از 2.3 متر است.
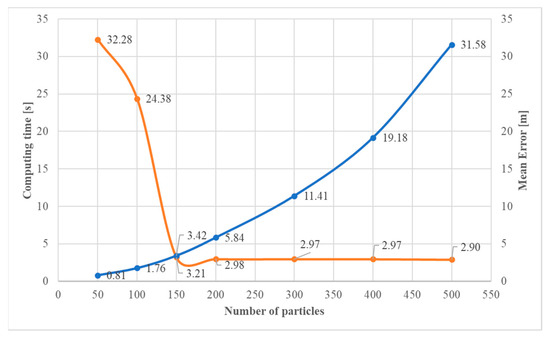
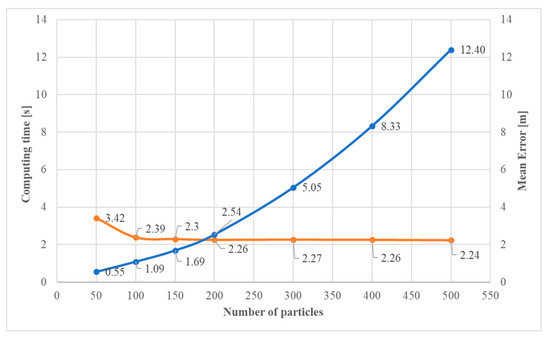
شکل 15 و شکل 16 به ترتیب مقایسه میانگین خطای موقعیت یابی و زمان محاسبه کلی برای ذرات مختلف PF و الگوریتم PF به کمک نقشه را نشان می دهد. منحنی آبی در شکل نشان دهنده رابطه بین تعداد ذرات و زمان مصرف کلی الگوریتم است. نتیجه نشان می دهد که زمان عملیات با تعداد ذرات افزایش می یابد. منحنی نارنجی در شکل نشان دهنده رابطه بین دقت موقعیت و تعداد ذرات است. همانطور که در شکل 15 نشان داده شده استهنگامی که تعداد ذرات کمتر از 150 باشد، خطای موقعیتیابی الگوریتم PF با افزایش تعداد ذرات بهطور قابلتوجهی کاهش مییابد و دقت موقعیتیابی زمانی که تعداد ذرات بیشتر از 150 باشد، تمایل به تثبیت دارد. علاوه بر این، شکل 16 نشان می دهد که PF به کمک نقشه در حدود 200 ذره همگرا می شود و دقت موقعیت یابی زمانی که تعداد ذرات بیشتر از 200 باشد تثبیت می شود. در مقایسه با PF، PF به کمک نقشه دقت موقعیت یابی و عملکرد پردازش الگوریتم را بهبود می بخشد. تا حدی
4. نتیجه گیری
این مطالعه یک روش محلی سازی داخلی را بر اساس تشخیص حالت حرکت ارائه می دهد. ابتدا الگوریتم FSM و DT اعمال می شود و پنج حالت تلفن را می توان به طور دقیق مانیتور و تشخیص داد. سپس با تجزیه و تحلیل ویژگیهای آشکار ژیروسکوپ در حین چرخش، روشهای مبتنی بر گام به گام را با توسعه عنوان جهانی بهبود دادیم. نتایج نشان میدهد که ثبات سرفصل جهانی پیشنهادی به طور متوسط در مقایسه با عنوان گام به گام به میزان 35.54 درصد افزایش مییابد. علاوه بر این، این مطالعه یک طرح PF را پیشنهاد میکند که تطبیق نقشه و ادراک رفتار را برای محدود کردن مشکلات تجمع انحراف عنوان و انتقال نامناسب ذرات و همچنین بهینهسازی تخمین عنوان ارائه میکند. در نتیجه، آزمایشهای میدانی نشان میدهند که الگوریتم پیشنهادی عملکرد قوی برای تخمین سرفصل و موقعیتیابی در حالتهای استفاده مختلف به دست آورد. برای کارهای آینده، ما قصد داریم رفتارهای مشخص تر عابران پیاده را در PF ادغام کنیم، مانند سوار شدن به آسانسور، بالا و پایین رفتن از پله ها، یا هل دادن درب، تا عملکرد سیستم محلی سازی داخلی را بهبود بخشیم. علاوه بر این، این مطالعه پنج حالت معمولی حمل یک گوشی هوشمند را بهینه می کند. حالت های حمل پیچیده تر، مانند حالت کیف، و همچنین انواع بیشتری از گوشی های هوشمند بیشتر مورد بررسی قرار خواهند گرفت. علاوه بر این، این مطالعه پنج حالت معمولی حمل یک گوشی هوشمند را بهینه می کند. حالت های حمل پیچیده تر، مانند حالت کیف، و همچنین انواع بیشتری از گوشی های هوشمند بیشتر مورد بررسی قرار خواهند گرفت. علاوه بر این، این مطالعه پنج حالت معمولی حمل یک گوشی هوشمند را بهینه می کند. حالت های حمل پیچیده تر، مانند حالت کیف، و همچنین انواع بیشتری از گوشی های هوشمند بیشتر مورد بررسی قرار خواهند گرفت.






بدون دیدگاه