1. معرفی
بیشتر کاربردها و مطالعات چند عامله با هدف تکرار رفتارهای خاص انسانی مانند گله داری [ 1 ]، مذاکره [ 2 ] و همکاری [ 3 ] انجام می شود.]. انسان ها ارگانیسم های پیچیده ای با رفتار پویا و ساختار استنتاجی هستند که در صورتی که اقدامات برنامه ریزی شده نتایج مورد انتظار را به دست نیاورد، می توانند تغییر کنند. ایجاد مدل عاملی که در سطح انسانی استنباط و تصمیم گیری کند، بسیار دشوار است. با این حال، می توان اقدامات از پیش تعریف شده ای را برای عامل در یک سلسله مراتب خاص ارائه کرد و بنابراین یک مدل عامل به دست آورد که بتواند به صورت پویا تصمیم بگیرد. فراهم کردن یک عامل با توانایی در نظر گرفتن اقدامات مختلف، توانایی کلی آن را افزایش می دهد، اما اجرای رفتارهای انسانی برای همه موقعیت های ممکن کار بسیار دشواری است. یک رویکرد هدف محور که رفتارها را برای موارد خاص تعریف می کند ممکن است به حل این مشکل کمک کند. به عنوان مثال، گرکو و همکاران. [ 4] یک روش مبتنی بر عامل برای ارزیابی آسیب پذیری لرزه ای پیشنهاد کرد. کائو و همکاران [ 5 ] مشکل یک رهبر را به دنبال اجماع مورد مطالعه قرار داد و یک روش تغییر رهبر را پیشنهاد کرد. سو و همکاران [ 6 ] پروتکلهای اجماع را با شبکههای سوئیچینگ متصل و متصل به یکدیگر پیشنهاد کرد. مندوزا-سیلوا و همکاران. [ 7 ] عوامل را به عنوان رانندگان برای توسعه یک سیستم پارکینگ هوشمند مدلسازی کردند. Eivazy و Malek [ 8 ] یک راه حل مبتنی بر عامل برای مدیریت سیل ارائه کردند. چندین شبیه سازی با عوامل متعدد برای تخلیه اضطراری انجام شد [ 9 ، 10 ، 11 ، 12 ، 13 ، 14 ، 15 ،16 ].
تخلیه اضطراری (که به عنوان خروج اضطراری نیز شناخته می شود) مشکلی است که نیازمند تعیین ایمن ترین طرح یا رویکرد برای تخلیه در مواقع اضطراری است. تخلیه ایمن توده مردم از یک مکان در زمان وقوع خطر، کار دشواری است. مسئله تخلیه دارای دو بعد تحلیلی اصلی است: محیط فیزیکی و رفتار افرادی که نیاز به خروج دارند. مشکل تخلیه اضطراری در یک محیط شلوغ ماهیت پیچیده ای دارد، به ویژه به دلیل رفتار افراد تحت استرس. این وضعیت ممکن است بسته به ساختار فیزیکی محیط حتی پیچیده تر شود. مطالعات تخلیه اضطراری برای محیط هایی مانند کشتی ها [ 17 ]، استادیوم ها [ 18 ]، فرودگاه ها [ 19 ] شبیه سازی شده است.]، پایانه های حمل و نقل عمومی [ 20 ]، و گودال های فونداسیون [ 21 ].
به عنوان یک فضای کاری، یک محیط اداری معمولا برای گروه بزرگی از افراد طراحی می شود تا در یک فضای بسیار کوچک کار کنند. چنین فضای کاری شلوغ ممکن است نگرانی های ایمنی جدی ایجاد کند، که می تواند باعث تاخیر یا عواقب غیرقابل پیش بینی در زمان اضطراری شود.
فرآیند تخلیه معمولاً دارای محدودیت زمانی است، از این رو به دلیل خطر قریب الوقوع در محیط، نیازمند مکانیسم های تصمیم گیری سریع و عبور است. مسیرهای تخمینی برخی از عوامل ممکن است با دیگران تلاقی داشته باشد و در نتیجه بسته به جمعیت، تنگناها، برخوردها و درگیری ها ایجاد کند. این موارد نیازمند مکانیسم های راه حل هستند. روش های مختلفی برای این کار توسط مطالعات مختلف ارائه شده است. نیوموبیی و همکاران [ 22 ] رویکردهای فراابتکاری را برای مشکل تخلیه مقایسه کردند. مشرف و همکاران [ 23 ] از آموزش مبتنی بر سخنرانی برای ایجاد درخت تصمیم گیری برای عوامل تخلیه استفاده کرد. گلاس و همکاران [ 24] روشی را برای اجتناب از برخورد دوربرد با استفاده از یک سیستم چند عاملی با مکانیسمهای جلوگیری از برخورد محلی و برنامهریزی مسیر جهانی پیشنهاد کرد. برگ و همکاران [ 25 ] مسیری را برای پیشبینی برخوردها از پیش محاسبه کرد و از تغییرات سرعت برای اجتناب از آنها استفاده کرد. فودیل و همکاران [ 26 ] اقداماتی مانند تغییر جهت، حرکت به جلو یا عقب و انتظار برای جلوگیری از برخورد را پیشنهاد کرد. وو و همکاران [ 27 ] بر رابطه بین رفت و آمد و تراکم ترافیک تاکید کرد و یک مدل مدیریت سرعت برای عوامل برای کاهش نسبت تراکم پیشنهاد کرد. از آنجایی که چندین عامل در یک محیط وجود دارد، از تعامل بین عامل ها نیز می توان برای حل تعارض استفاده کرد. سیکارا [ 28] استفاده از مذاکره را برای حل تعارضات چند عاملی غیرهمکار پیشنهاد کرد. مکانیسم های مربوط به انتقال اطلاعات محیطی نیز استفاده شده است [ 29 ]. ژائو و همکاران [ 30 ] نقاط ذخیره اطلاعات ثابت را در کار خود تعریف کردند و ثابت کردند که عوامل عملکرد تخلیه خود را هنگام استفاده از ابزارهای پیشنهادی بهبود می بخشند. چوی و همکاران [ 31 ] انواع مختلفی از عوامل را تعریف کرد که نشان دهنده آسیب ها و ناتوانی ها هستند، که به انواع مختلف نشانگرها پاسخ می دهند.
اکثر سناریوهای تخلیه استرس زا هستند زیرا نتیجه موقعیت های ظاهری یا احتمالاً خطرناک هستند. بنابراین باید جنبه های روانی مسئله را نیز در نظر گرفت. دوزی و میزلز [ 32 ] بیان کردند که انسان ها تمایل دارند مناطق حایل ایجاد کنند تا به عنوان محافظت در برابر تهدیدات درک شده عمل کنند. این مناطق بافر در شرایط تنش گسترش می یابند. سامر و همکاران [ 33 ] اشاره کرد که نقض فضای شخصی ممکن است منجر به سطوح بالاتر استرس و بی قراری شود. مکانیسم های مختلف [ 34 ] برای حفظ فضای شخصی با استفاده از مدل های چند عاملی شبیه سازی شده است. آماوکا و همکاران [ 35] یک شبیهسازی فضای شخصی ساخت، در حالی که فاصلهگذاری عوامل را بسته به رابطه آنها، که میتواند در سطح دوست، کسبوکار یا غریبه باشد، مدیریت میکند. یک کار مبتنی بر سیستم اطلاعات جغرافیایی (GIS) [ 36 ] اشغال سلول های شبکه را به تعداد معینی محدود کرد تا فضای شخصی بین عوامل در طول تخلیه زلزله/سونامی حفظ شود. رویکرد گراف-گراف اجازه نمایش دادههای مکانی و اشیاء را به عنوان شبکهها [ 37 ] میدهد و در بسیاری از مدلهای خروجی [ 38 ] استفاده میشود. ثابت شده است که این رویکرد برای ایجاد یک مدل تحلیلی مفید است [ 39 ، 40 ] و به ویژه برای محیط های داخلی [ 41 ] قابل استفاده است. رویکرد گرید-گراف نیز مقیاسپذیری را فراهم میکند [ 42] و سهولت بهینه سازی [ 43 ].
مفهوم عواملی که قادر به تغییر رفتار، نقش یا رویکرد خود هستند در چندین مطالعه مورد بررسی قرار گرفته است [ 44 ، 45 ، 46 ]. پیرس و همکاران [ 44 ] یک سیستم تصمیم گیری ترکیبی ایجاد کرد که در آن عوامل می توانند نقش ها یا اهداف را با توجه به موقعیت تغییر دهند. آل یاسین و همکاران [ 45 ] یک مدل رفتار تطبیقی ارائه کرد که در آن عوامل رفتار خود را بر اساس مشاهدات یا ورودیهای فوری تغییر میدهند. سازگاری را می توان با استفاده از یادگیری ماشین یا شبکه های عصبی نیز به دست آورد [ 46]. مطالعات در مورد خروج اضطراری بیشتر بر شرایط محیطی فیزیکی متمرکز است، با این فرض که یا عوامل اطلاعات قبلی در مورد محیط دارند یا اطلاعاتی در طول تخلیه به آنها ارائه می شود. علاوه بر این، آنها بیشتر بر روی یک مدل رفتاری واحد تمرکز می کنند تا ترکیبی از ویژگی های رفتاری عوامل. شبیه سازی با برخی از ویژگی های گم شده ممکن است موقعیت های دنیای واقعی را نشان ندهند. بنابراین، مدلهایی با رفتارهای ترکیبی که ویژگیهای بیشتری دارند برای انعکاس دقیقتر موارد دنیای واقعی مورد نیاز است.
این مقاله یک مدل عامل پارامتریک را ارائه میکند که به خاطر سپردن و رفتار اجتماعی در یک محیط اداری در طول شرایط اضطراری با استفاده از اجتناب از برخورد، مذاکره، راهحل تعارض و مکانیسمهای برنامهریزی مسیر شبیهسازی میکند. در مدل، مکانیسمهای فرار و حل تعارض چندگانه به عنوان عناصر درخت تصمیم (یک مدل سلسله مراتبی) برای حذف معایب مشخصه آنها تعریف شد. الگوریتم مدیریت حافظه برای تقلید از رفتار “به خاطر سپردن با اکتشاف” انسان ها ایجاد شده است که راه حلی برای مشکلی که به دلیل عدم وجود اطلاعات مکانی قبلی ایجاد می شود ارائه می دهد. مدل چند عاملی پیشنهادی ما را قادر میسازد تا عملکرد را با استفاده از کنترلهای پارامتریک اندازهگیری و تنظیم کنیم. این کنترل ها مکانیزم کالیبراسیون را فراهم می کنند تا مدل بتواند با محیط های مختلف سازگار شود. برای یافتن تأثیر عوامل بر یکدیگر و کارایی تنظیمات پارامتریک، مشاهدات از طریق شبیهسازی با استفاده از مدل پیشنهادی انجام شد. این تنظیمات برای مشاهده موفقیت مجموعههای پارامتری که مدلهای رفتاری طراحیشده بهینه را برای تخلیه ایمن ارائه میدهند، آزمایش شدند.
2. مواد و روشها
نمودار فرآیند کلی مدل رفتار سلسله مراتبی مطالعه در شکل 1 نشان داده شده است. مدل محیطی در مرحله اولیه مطالعه توسعه داده شد. در این مرحله با قرار دادن طرح اداری بر روی این مدل یک مدل گراف ایجاد شد. بعداً مدل سه بعدی محیط شبیه سازی توسعه یافت. در مرحله دوم، مدل رفتار عاملی که بر روی مدل گراف طراحی شده اجرا می شود، توسعه داده شد. در مدل، مکانیسمهای مذاکره، همکاری و استدلال با مدیریت حافظه پویا (DMM) برای عوامل برنامهریزی شد. در همان زمان، الگوریتم مسیریابی که عوامل در حال حرکت از آن استفاده می کردند، برنامه ریزی شد. محیط شبیه سازی در محیط Unity3D با زبان برنامه نویسی سی شارپ توسعه یافته است. در مرحله سوم مدل با محیط شبیه سازی مورد آزمایش قرار گرفت. در محیط شبیه سازی، رفتارهای عامل با در نظر گرفتن موقعیت فیزیکی اولیه آنها آزمایش شد (به عنوان مثال، بدترین حالت و سناریوهای موردی توزیع شده همگن) با کالیبراسیون پارامتریک. در مرحله چهارم مطالعه، مدل مورد ارزیابی قرار گرفت. در این مرحله، عملکرد تخلیه عوامل در رابطه با دانش فضایی آنها و استفاده از حالتهای سلسله مراتبی رفتاری شامل تبادل اطلاعات، دور زدن و مکانیسمهای بازنگری مورد ارزیابی قرار گرفت.
2.1. مدل محیطی
توانایی رشد در اندازه یا پیچیدگی و یافتن راه حل بهینه برای مدل توسعه یافته و سهولت اجرا از جمله معیارهای مورد استفاده در مدل محیطی است. برنامه های گرید گراف مقیاس پذیری و سهولت بهینه سازی را فراهم می کنند. مدلهای گراف شبکهای میکرو یا مقیاس کوچک را میتوان به مدلهای فضایی در مقیاس کلان یا بزرگ گسترش داد. بنابراین، مدل گرید-گراف ترجیح داده می شود، همانطور که در [ 23 ، 24 ] برای شبیه سازی مدل محیطی.
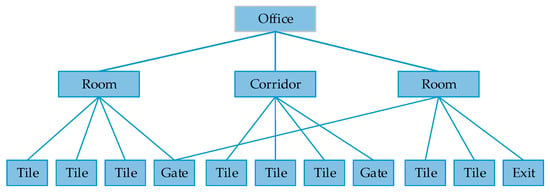
چیدمان اداری معمولاً دارای طراحی هندسی متقارن است و به راحتی بر روی گراف شبکه ای پیاده سازی می شود. اجزای مورد استفاده در طراحی اداری در یک سلسله مراتب پیاده سازی می شوند. اتاقها و راهروها زیر گروههایی از نمودار کامل هستند که دفتر را نشان میدهند. شکل 2 سلسله مراتب موجودیت ها را در یک دفتر نشان می دهد.
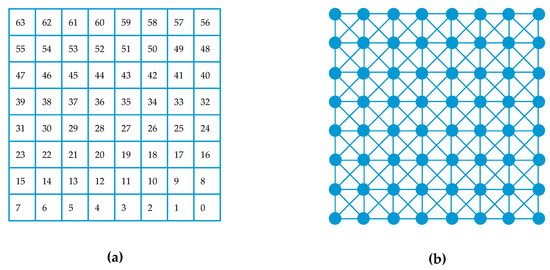
مدل محیطی شبیهسازی دارای طرحبندیهایی است که شامل کف، اتاقها، ورودیها، دروازهها، راهروها و نقاط خروجی است. کف پایه نمودار است. برای سادگی، کف اداری از 64 کاشی به صورت شبکه ای 8 × 8 با اندازه مساوی تشکیل شده است که 5 × 5 واحد است. هر گره (گره های منظم، دروازه ها یا خروجی ها) به یک اتاق یا یک راهرو تعلق دارد. از آنجایی که دروازه ها حداقل از دو گره تشکیل شده و به عنوان گذرگاه بین اتاق ها یا راهروها عمل می کنند، می توانند به بیش از یک موجودیت تعلق داشته باشند. در مدل، منطقه اداری به کاشیها تقسیم میشود و هر کاشی نشاندهنده گرهای از نمودار است. تمام کاشی ها توسط لبه ها به هم متصل می شوند ( شکل 3 ).
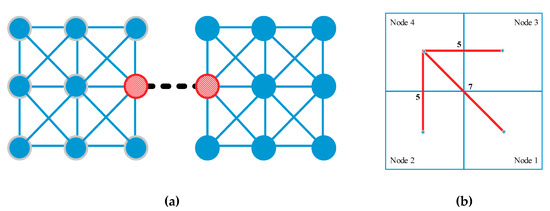
در مدل، دیوارها در حاشیه کاشی ها قرار می گیرند و از عبور عوامل از روی آنها جلوگیری می کنند. بلوک ها با حذف لبه های ناحیه بلوک اتصال کاشی ها اجرا می شوند. اتاق ها مناطق محصور شده ای هستند که با دیوار احاطه شده اند. همه اتاق ها حداقل یک دهانه دارند که نمایانگر در است. ورودی ها اساساً به عنوان لبه هایی مدل می شوند که گره های اتاق را به کل نمودار متصل می کنند. برخی اتاق ها می توانند بیش از یک ورودی داشته باشند. ورودیها به اندازهای عریض طراحی شدهاند که اجازه خروج یا ورود یک نماینده را در یک زمان میدهد. گیت ها توسط جفت گره هایی که توسط لبه ورودی به هم متصل شده اند مدل سازی می شوند. شکل 4a گره های دروازه ها و یک ورودی را نشان می دهد که با یک لبه نشان داده شده است. خروجیها بهعنوان کاشیهای منفرد مدلسازی میشوند و بهعنوان خروجی علامتگذاری میشوند، در حالی که راهروها به عنوان گرههای خطوط متصل مدلسازی میشوند. هر گره با لبه ها متصل است. در نمودار، وزن یال ها با فاصله نقاطی که به هم متصل می شوند، تعریف می شوند. وزن لبه ها نشان دهنده طول واحد است که اندازه گیری حرکت عامل ها بین گره ها است. همه لبه ها خطی فرض می شوند. بنابراین، وزن ها برابر است با فاصله اقلیدسی دو نقطه انتهایی یال ها. وزن لبه های مورب بیشتر از وزن های متعامد است ( شکل 4 ب).
2.2. مدل نماینده
افراد شبیه سازی شده در این کار به عنوان عوامل مستقل برنامه ریزی شدند. هنگامی که شبیه سازی شروع شد، هدف اصلی همه عوامل این بود که “به یکباره به گره خروج برسند”. عوامل از الگوریتم جستجوی A* [ 47 ] برای یافتن اهداف خود استفاده کردند.
الگوریتم A* یک الگوریتم جستجوی اکتشافی شناخته شده است. این آسانی حل مسائل چند بعدی را با کمک یک تابع اکتشافی پیش بینی می کند. در ابتدایی ترین شکل آن، هزینه مسیر بهینه f(n ) است
که در آن (n ) گره بعدی در مسیر است و g(n) هزینه واقعی یک مسیر بهینه از نقطه شروع تا گره n است. تابع اکتشافی h(n) برآورد هزینه یک مسیر بهینه از گره n به گره هدف ترجیحی n است. الگوریتم ساختار نسبتاً ساده ای دارد. مسیری با کمترین هزینه شناخته شده را دنبال می کند و صف اولویت بندی شده ای از بخش های مسیر جایگزین را در طول مسیر نگه می دارد. الگوریتم A* گره کم هزینه، گره با کمترین f(n) را انتخاب می کند.ارزش، به عنوان گره آغازین است و مسیر را با کمترین هزینه شناخته شده ادامه می دهد تا زمانی که به گره مورد نظر برسد. اگر هزینه یک بخش مسیر در هر گره بیشتر از گره دیگر باشد، بخش کمهزینه را به عنوان مسیر جایگزین انتخاب میکند. این روند تا رسیدن به هدف ادامه می یابد. شبه کد الگوریتم A* در پیوست A ( جدول A1 ) آورده شده است.
دو تابع اکتشافی وجود دارد که معمولاً در سیستم های اطلاعات جغرافیایی (GIS) برای محاسبه فاصله بین دو نقطه، فاصله منهتن و اقلیدسی استفاده می شود. در مقایسه با منهتن، فاصله اقلیدسی همیشه کوتاهترین فاصله بین دو نقطه را تضمین می کند اگر فاصله بین دو نقطه دور نباشد. فاصله اقلیدسی به عنوان تابع اکتشافی در مدل عامل انتخاب شد.
تابع اکتشافی ( h ) در فضای 3 بعدی به عنوان فاصله اقلیدسی تا هدف ارزیابی می شود که با استفاده از بردار فاصله قابل محاسبه است. ∂ایکس،∂y،∂z) مانند رابطه (2):
تابع اکتشافی کاربرد مهم دیگری به جز محاسبات هزینه مسیر در طول جستجوی A* دارد. عوامل تصمیمات خود را در مورد اهداف بعدی کاملاً بسته به مقادیر تابع اکتشافی در جایی که چندین گزینه هدف در دسترس هستند، می گیرند. هدف این انتخاب طراحی تقلید از دست دادن توانایی برنامه ریزی در شرایط استرس است.
در این مدل، یک عامل به دلیل محدودیتهای فضای شخصی اجازه داشت تنها یک کاشی (گره) را در یک زمان اشغال کند تا از دست دادن توانایی برنامهریزی تحت استرس را تقلید کند. همه عوامل برای داشتن سرعت حرکت یکسان، 4 واحد بر ثانیه برنامه ریزی شده بودند. این چابکی را برای عبور از یک لبه غیر مورب در 1.25 ثانیه فراهم می کند. با مشاهده مجدد شکل 4 ب، این همچنین نشان می دهد که یک عامل می تواند گره خود را به صورت مورب در 1.25√2 ثانیه تغییر دهد.
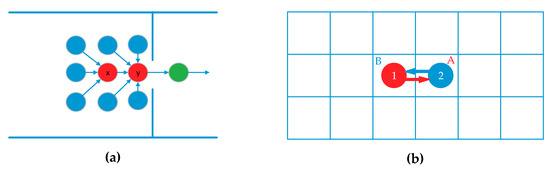
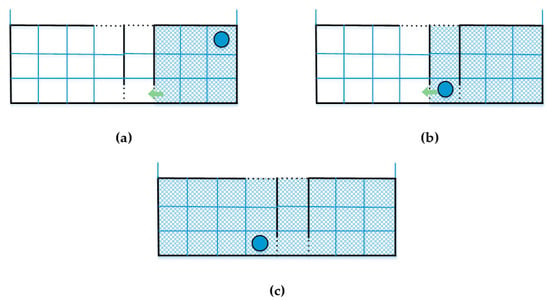
عوامل می توانند دروازه ها و خروجی ها را از کاشی های دیگر تشخیص دهند. در ابتدا، همه عوامل حافظه نقشه فضایی خود را برای هر موقعیت خروجی بررسی می کنند. اگر یک یا چند خروجی پیدا کنند، نزدیکترین خروجی را به عنوان هدف تعیین می کنند. در غیر این صورت، دروازه های شناخته شده را جستجو می کنند و نزدیک ترین دروازه ناشناخته را به عنوان هدف انتخاب می کنند. با شلوغ شدن دفتر، ماموران ممکن است یکدیگر را مسدود کنند. این انسداد ممکن است به دو شکل ازدحام و درگیری رخ دهد. شکل 5 ماهیت ازدحام و درگیری را نشان می دهد.
هنگامی که عوامل شروع به حرکت برای رسیدن به یک هدف خاص (به عنوان مثال، خروج، دروازه) در همان زمان، این حرکت توده ای ممکن است ازدحام ایجاد کند. در صورت تراکم، ممکن است عوامل مجبور باشند تا حذف آن صبر کنند. یک پارامتر آستانه جمعیت برای این که موقعیت توسط عامل به عنوان ازدحام درک شود، تعریف شد. هنگامی که یک عامل متوقف می شود، شروع به شمارش عوامل بازدارنده می کند. اگر عوامل بازدارنده بیشتر از مقدار آستانه جمعیت از پیش تعریف شده وجود داشته باشد، عوامل آن را به عنوان ازدحام درک می کنند و یک پرچم جمعیت تعیین می کنند. از آنجایی که چندین عامل یک نقشه را جستجو می کنند، مسیرهای کم هزینه آنها ممکن است در برخی از گره ها قطع شود. فرض کنید A و B گره های مجاوری باشند که با یک لبه به هم وصل شده اند و عامل های 1 و 2 روی این گره ها قرار دارند. هنگامی که عوامل 1 و 2 سعی می کنند به گره های A و B حرکت کنند، همانطور که در شکل 5 مشاهده می شودب، یک درگیری رخ می دهد و توسط اولین عامل شناسایی می شود که بررسی می کند که آیا گره هدف آن اشغال شده است یا خیر. هنگامی که یک درگیری شناسایی شد، عوامل یک پرچم درگیری را تنظیم می کنند و حرکت آنها را متوقف می کنند.
مهم ترین تفاوت بین تراکم و درگیری این است که تراکم معمولاً یک عقب گرد موقت است در حالی که درگیری دائمی است اگر اقدامات احتیاطی انجام نشود یا برنامه جایگزین تعریف شود. توانایی های حرکت، تعامل، تعارض و حل تراکم عامل با چهار پارامتر کنترل می شود: دانش فضایی، تبادل اطلاعات، دور زدن و بازنگری.
2.3. مدل رفتاری
مدل رفتاری پیشنهادی برای استفاده توسط عوامل دارای ساختار سلسله مراتبی است که از DMM، مذاکره، همکاری و اقدامات استدلالی تشکیل شده است. مدل رفتار مکانیزم های مختلف را به صورت سلسله مراتبی ترکیب می کند. در مدل، هر مکانیزم را می توان به صورت پارامتری کنترل کرد. این مکانیسم ها در سه زیربخش ارائه می شوند: حافظه پویا با دانش فضایی، مکانیسم های فرار و سلسله مراتب کنش رفتاری.
2.3.1. مدیریت حافظه پویا
مدیریت حافظه پویا (DMM) توسط پارامتر دانش فضایی باینری کنترل می شود. دانش فضایی وضعیت اولیه دانش نمایندگان از چیدمان دفتر را تنظیم می کند. اگر پارامتر دانش فضایی نادرست باشد، عوامل جستجوی خود را بدون هیچ گونه دانش مکانی اولیه (حافظه خالی) شروع می کنند و تمایل دارند از توانایی به خاطر سپردن خود در حین بررسی نقشه استفاده کنند.
کاوش و به خاطر سپردن بر اساس یک مکانیسم ساده گسترش حافظه پویا ساخته شده اند. شکل 6 فرآیند گسترش حافظه را در حین کاوش نشان می دهد. مانند انسان، عامل ها به گونه ای طراحی شده اند که بتوانند اتاقی را که در آن قرار دارند را درک کنند. بنابراین، وقتی یک عامل در یک اتاق است، می تواند اطلاعاتی را در مورد تمام گره های اتاق به دست آورد. هنگامی که یک گره در دید یک عامل قرار می گیرد، بلافاصله به حافظه آن عامل اضافه می شود. عامل دانش فضایی خود را بر روی نقشه با به خاطر سپردن اتاق پس از رسیدن به دروازه یک اتاق ناشناخته گسترش می دهد. اگر پارامتر دانش فضایی روی true تنظیم شود، هر عاملی با دانستن هر اتاق، دروازه و خروجی در دفتر، شبیه سازی را شروع می کند. بنابراین، همه عوامل مستقیماً نزدیکترین خروجی را به عنوان هدف خود انتخاب می کنند.
2.3.2. مکانیسم های فرار
سه مکانیسم فرار برای مدل تعریف شد: تبادل اطلاعات، دور زدن و بازنگری.
تبادل اطلاعات یک مکانیسم همکاری ساده برای مدیریت درگیری یا تراکم است. در صورت تضاد یا تراکم، اگر تبادل اطلاعات مجاز باشد و دانش فضایی نادرست باشد، عواملی که در گرههای مجاور هستند ممکن است برای به اشتراک گذاشتن دانش فضایی خود بر روی نقشه ارتباط برقرار کنند. در طول تبادل اطلاعات، هر دو طرف بررسی می کنند که آیا یکی از آنها اطلاعاتی در شبکه دارد که توسط دیگری ناشناخته است یا خیر. زمانی که یکی اطلاعات جدیدی داشته باشد، به حافظه نقشه فضایی عوامل دیگر اضافه می شود. چیدمان اتاق و راهرو کوچکترین عناصر اداری در طول گسترش حافظه هستند و بنابراین به عنوان کوچکترین اطلاعات قابل تبادل در نظر گرفته می شوند.
هنگامی که یک درگیری رخ می دهد، عاملی که تضاد را تشخیص می دهد (عامل 1) سیگنالی را به عامل دیگر (عامل 2) می فرستد تا تضاد را تأیید کند و خواستار شناخت گره هدف فعلی خود می شود. تی2). اگر عامل 1 اطلاعاتی در مورد هدف عامل 2 در حافظه خود داشته باشد ( م1، یک رویه تبادل اطلاعات را شروع می کند و اطلاعات خود را با عامل 2 به اشتراک می گذارد. سپس رویه تبادل، مجموعه حافظه عامل 2 را مانند رابطه (3) به روز می کند. پس از تبادل، عامل 1 بررسی می کند که آیا عامل 2 هدف خود را تغییر داده است یا خیر. با استفاده از اطلاعات تازه به دست آمده، عامل 2 ممکن است مسیر مقصد خود را برای حل تعارض تغییر دهد. در غیر این صورت، مامور 2 برای اطلاع دادن به عامل 1 از همین روال پیروی می کند.
دور زدن یک مکانیسم مذاکره است که برای درگیری ها موثر است. با این حال، در رفع ازدحام موثر نیست. روند کنار زدن طبق برنامه رفتاری شروع می شود. این روش شامل چهار مرحله است:
-
برای تشخیص تضاد، عامل ابتدا گره های مجاور را به منظور افزایش ارزش اکتشافی برای یافتن یک کاشی خالی جستجو می کند.
-
اگر یک اسلات خالی وجود داشته باشد، شکاف را به عنوان هدف موقت خود تعیین می کند. با این حرکت دیگر شرط تعارض وجود ندارد و می توان آن را حل شده دانست.
-
اگر عامل اول نتواند یک شکاف خالی پیدا کند، به این معنی است که آن را احاطه کرده اند. در این حالت، عامل یک پرچم جمعیت را بالا میبرد و نماینده دیگر همان اسکن را شروع میکند.
-
اگر عامل دوم یک اسلات خالی پیدا کند، آن اسلات را به عنوان هدف جدید خود تعیین می کند. در غیر این صورت، هر دو عامل محاصره شده اند و باید منتظر بمانند تا یک گشایش وجود داشته باشد یا اقدام بعدی در طرح آغاز شود.
بازنگری یک مکانیسم استدلال عامل ساده است که در آن اهداف متعدد بسته به موقعیت عوامل اطراف ارزیابی می شوند. اگر بازنگری یک مسیر مجاز باشد، وقتی مسیر یک نماینده توسط عواملی بیش از حد آستانه جمعیت مسدود شود، به طور موقت از حرکت می ایستد، پرچم جمعیت خود را تنظیم می کند و شروع به انتظار می کند. زمان انتظار با پارامتر زمان انتظار تعریف می شود. هنگامی که یک پرچم جمعیت تنظیم می شود، بررسی می کند که آیا وضعیت فعلی یک بن بست است یا یک عقب گرد موقت ناشی از ازدحام نسبتاً کوچک.
در تصمیم گیری، بازنگری یک مسیر ارتباط نزدیکی با پارامترهای زمان انتظار و آستانه جمعیت دارد. با کاهش مقدار آستانه جمعیت، نمایندگان تمایل دارند پرچم جمعیت را بیشتر برافراشته کنند. از سوی دیگر، اگر زمان انتظار روی مقادیر بالاتر تنظیم شود، به دلیل افزایش احتمال رفع ازدحام، به احتمال زیاد تعداد رویههای بازنگری فعال کاهش مییابد. اگر پس از مدت زمان مشخصی مسیر همچنان شلوغ و مسدود باشد، نماینده روند بررسی مجدد را آغاز می کند. کد کاذب برای راه اندازی روند بررسی مجدد در ضمیمه A ( جدول A2 ) آورده شده است.
هنگامی که بررسی مجدد آغاز می شود، عامل وضعیت اشغال هشت گره (Oadj) مجاور گره فعلی را بررسی می کند. سپس در نظر می گیرد که جمعیت احتمالاً به همان هدف حرکت می کند و وضعیت ازدحام را حفظ می کند و ضریب جمعیت را محاسبه می کند ( سیسیتی) مانند رابطه (4) با شمارش گره های اشغال شده. شبه کد برای محاسبه ضریب جمعیت در پیوست A ( جدول A3 ) آورده شده است.
سپس عامل هزینه هدف را مجدداً ارزیابی می کند ( سیتی) مانند رابطه (5) با تغییر مقدار اکتشافی ( ساعتتی). مقدار اکتشافی به سادگی با ضرب آن در ضریب جمعیت برای هدف اصلاح می شود.
پس از محاسبه هزینه موقت برای هدف، عامل شروع به جستجوی هدف جدید خود برای وضعیت به روز می کند. تصمیم گیری هدف جایگزین با مقایسه مقادیر اکتشافی ( ساعتتی) و هدف ( T ) با حداقل هزینه.
از آنجایی که ضریب جمعیت همیشه بزرگتر از 1 است، تغییر مقدار اکتشافی هدف فعلی هزینه آن را افزایش می دهد. در این مورد، انتظار نمی رود که هدف فعلی دوباره انتخاب شود. با این حال، اگر عامل نسبت به سایر موارد ممکن به طور جزئی به این هدف نزدیکتر باشد، هزینه آن ممکن است کمترین باشد. در نتیجه، عامل ممکن است بر تصمیم فعلی خود پافشاری کند. هنگامی که هدف جدید توسط فرآیند بررسی مجدد انتخاب شد، تغییرات مقادیر اکتشافی به عقب برگشته و مسیر جدید با استفاده از الگوریتم A* ساخته خواهد شد.
2.3.3. طرح سلسله مراتب رفتاری
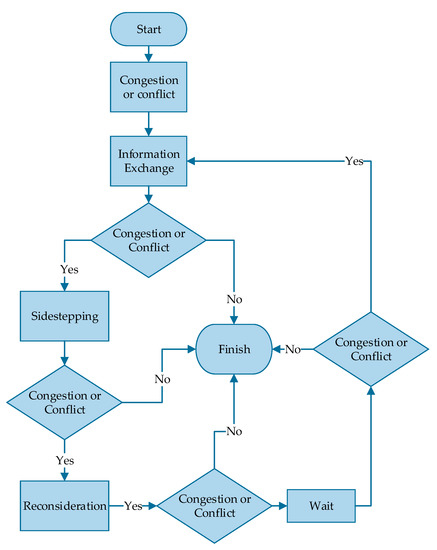
عامل ها برای اجرای یک عمل در یک زمان طراحی شده اند که یک طرح حل تعارض/ازدحام را به همراه دارد. طرح های رفتاری سلسله مراتب مکانیسم های راه حل و جریان های تصمیم عامل ها را تعریف می کنند. مکانیسم های حل تعارض به ترتیب با توجه به ترتیب طرح رفتار انتخاب شده فعال می شوند. تنها در صورتی می توان از یک رویه یا اقدام استفاده کرد که روش های قبلی نتوانند تعارض یا ازدحام را حل کنند. اگر همه اقدامات در برنامه با شکست مواجه شوند، عامل منتظر می ماند و در مرحله بعدی برنامه رفتاری خود را دوباره شروع می کند. شش طرح رفتاری (ISR، IRS، SIR، SRI، RIS و RSI) را می توان با سه اقدام حل تعارض-ازدحام ایجاد کرد. فلوچارت طرح ISR در شکل 7 نشان داده شده است. این طرح فرآیندهای تبادل اطلاعات، دور زدن و بررسی مجدد را به صورت متوالی اجرا می کند.
2.4. تست مدل
برای آزمایش رویکرد پیشنهادی، یک محیط شبیهسازی یک مدل اداری سه بعدی طراحی و برنامهریزی شد. دفتر طراحی شده شامل 4 اتاق است که توسط 2 راهرو به هم متصل شده و دارای 2 خروجی می باشد. 16 کارگزار به نمایندگی از کارمندان اداری در موقعیت های شروع مختلف قرار گرفتند. برنامه های عامل به گونه ای طراحی شده بودند که به صورت رشته های مستقل اجرا شوند. در همین حال، همه عوامل برنامهریزی شده بودند که اندازه، سرعت و برنامههای رفتاری یکسانی داشته باشند و با پرچمهای Boolean کنترل شوند که تبادل اطلاعات، گسترش حافظه، کنار زدن و تواناییهای بازنگری آنها را فعال یا غیرفعال میکند. یک تایمر برنامه ریزی شده است تا با شروع شبیه سازی شروع شود و زمانی پایان یابد که همه عوامل در دفتر به یکی از خروجی ها برسند.
رفتارهای عامل در رابطه با موقعیت فیزیکی اولیه و دانش فضایی آنها برای آزمایش مدل شبیهسازی شد. با این حال، هنگامی که تعداد عامل ها و کاشی ها در نظر گرفته می شود، یک مشکل موقعیت اولیه جایگزینی عامل در چیدمان دفتر وجود دارد. تعداد موقعیت های اولیه احتمالی عامل ها را می توان به صورت معادله (7) محاسبه کرد:
که در آن n تعداد کاشی هایی است که فضای شخصی نماینده ها را نشان می دهد و r تعداد عوامل است. محیط شبیه سازی دارای 64 کاشی و 16 عامل است. 2 تا از 64 کاشی نشان دهنده خروجی ها هستند و 62 کاشی می توانند برای تعریف موقعیت اولیه (فضای شخصی) برای هر عامل استفاده شوند. در این مورد، معادله (8) تقریباً 2.73 × 1014 ترکیبی از جایی که عوامل می توانند در ابتدا قرار گیرند، به دست می آید:
همچنین لازم به ذکر است که هر ترکیب دارای 28 سناریو است. بنابراین، مسئله به یک مشکل موقعیت یابی برای شبیه سازی ها تبدیل می شود.
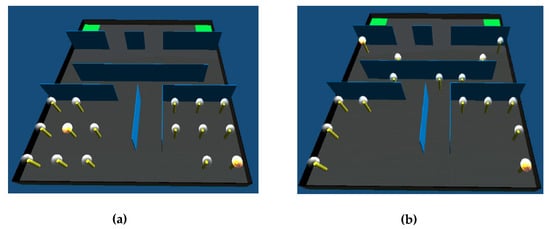
یکی از روشهای حل این مشکل، شروع شبیهسازی با عوامل تصادفی است. با این حال، این رویکرد ممکن است واقع بینانه نباشد یا یک مورد واقعی را نشان دهد. بنابراین، برای شبیهسازی، ما 2 سناریو موقعیتیابی فیزیکی واقعی را برای عوامل انتخاب کردیم: بدترین حالت و یک مورد توزیع همگن، همانطور که در شکل 8 نشان داده شده است. در بدترین حالت ( شکل 8 الف)، همه عوامل در ابتدا در 2 اتاق دورتر از خروجی قرار گرفتند. می توان آن را به عنوان یک قیاس با وضعیت در نظر گرفت که 2 جلسه یا رویداد موازی در این اتاق ها درست قبل از تخلیه اضطراری وجود داشت. این طرح همچنین ما را قادر می سازد تا عملکرد تخلیه را زمانی که عوامل تحت استرس رفتار می کنند، ارزیابی کنیم. در مورد عامل توزیع شده همگن ( شکل 8ب) همه کارگزاران همانطور که در موقعیت های معمول خود در دفتر قرار می گرفتند قرار گرفتند.
در طول شبیهسازی، موقعیتهای زیر مربوط به مکانیسمهای کنار زدن، بررسی مجدد و تبادل اطلاعات به همراه مکانهای اولیه عوامل را نیز در نظر گرفتیم:
-
برای مشاهده اثر مکانیسم کنار زدن، باید گره های خالی در اطراف عوامل وجود داشته باشد تا به ناحیه ای که در آن درگیری دارند منجر شود.
-
مکانیسم بازنگری مسیرهای جایگزین را در صورت ازدحام ارزیابی می کند. هنگامی که چندین عامل در اتاقی با یک در قرار می گیرند، به طور طبیعی ازدحام در درب ایجاد می شود. در این مورد، اثرات این مکانیسم را نمی توان مشاهده کرد، زیرا عوامل نمی توانند با اجرای روش بررسی مجدد، یک خروجی جایگزین پیدا کنند.
-
اطلاعات مکانی در حافظه آنها معمولاً تقریباً یکسان است وقتی همه عوامل در مکان های نزدیک شروع می شوند. در این حالت، تأثیر مکانیسم تبادل اطلاعات تمایل به کاهش دارد.
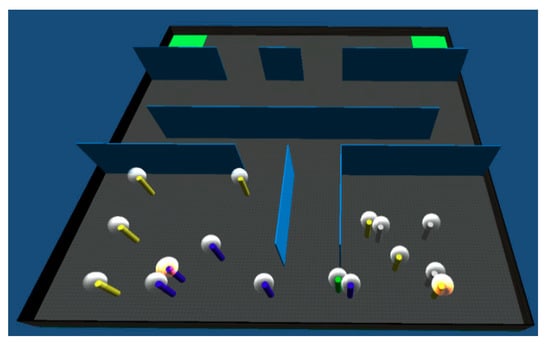
در صورتی که ماموران در محل قرارگیری درب های اداری قرار گیرند بدون نیاز به مکانیزم فرار مستقیماً به سمت خروجی حرکت می کنند. در این حالت ممکن است داده های معناداری از شبیه سازی به دست نیاید. کدگذاری رنگ به عوامل هر روش اختصاص داده شد تا به صورت بصری حرکات و رویه های فعال آنها را در طول شبیه سازی نظارت کند ( شکل 9 ).
3. نتایج و بحث
شبیهسازیها برای ارزیابی (i) تأثیر دانش فضایی بر عملکرد تخلیه برای هر دو مورد نشاندادهشده در شکل 8 انجام شد . (ii) کالیبراسیون مکانیسم بازنگری به همراه (i) برای هر مورد برای ارزیابی عملکرد تخلیه. و (iii) عملکرد مدل رفتار سلسله مراتبی برای هر دو مورد با 28 طرح رفتاری ممکن.
3.1. تأثیر دانش فضایی
داشتن اطلاعات در مورد طرح نقشه موثرترین تقویت در مدل است. از آنجایی که هدف رسیدن به خروجی ها است، دانستن مکان آنها به طور قابل توجهی به عملکرد عوامل کمک می کند. تمام پارامترهای مؤثر در رفتار عامل روی نادرست تنظیم شدند تا فقط تأثیر دانش فضایی بر عملکرد فرار ارزیابی شود. سپس، شبیهسازی با تعداد متفاوتی از عوامل دارای اطلاعات مکانی برای هر دو مورد اجرا شد. جدول 1 تأثیر دانش فضایی را بر عملکرد تخلیه نشان می دهد. در یک سناریوی تخلیه موفق، در نظر گرفته شده است که همه عوامل در کوتاه ترین فاصله زمانی ممکن فرار کنند. بنابراین، در مطالعه، میانگین زمان فرار تنها در صورتی اندازه گیری شد که همه عوامل به خروجی رسیدند.
همانطور که در جدول 1 نشان داده شده است ، تخلیه موفقیت آمیز با میانگین زمان فرار 38.07 ثانیه برای مورد 1 مشاهده شد که حداقل 15 عامل از 16 عامل دارای دانش فضایی بودند. به طور مشابه، برای مورد 2، تخلیه موفقیت آمیز با میانگین زمان فرار 32.99 ثانیه مشاهده شد که 11 عامل از 16 عامل دانش فضایی داشتند. وقتی همه یا حداقل 15 نفر از 16 عامل دانش فضایی روی نقشه داشتند، تخلیه موفقیت آمیز با میانگین زمان های مختلف فرار برای هر دو مورد مشاهده شد. میانگین زمان فرار، همانطور که انتظار می رفت، در مورد 1 که نشان دهنده بدترین وضعیت در مقایسه با مورد 2 است، بیشتر بود.
نتایج جدول 1 نشان می دهد که وقتی همه عوامل از چیدمان مطلع شدند، مشکل شکل مستقیم به خود گرفت و ماموران در کمترین فاصله زمانی دفتر را تخلیه کردند. در این مورد، عملکرد تحت تأثیر هیچ پارامتر دیگری قرار نگرفت، زیرا زمانی که عوامل برای رسیدن به یک هدف تنظیم می شوند، مدل هیچ تضاد یا ازدحام ایجاد نمی کند. بنابراین، مکانیسم های حل تعارض و تراکم نیازی نخواهد بود. بنابراین، کوچکترین میانگین موفقیت آمیز زمان فرار را می توان به عنوان یک مقدار بهینه برای مدل تفسیر کرد.
3.2. کالیبراسیون مکانیسم تجدید نظر
همانطور که در بخش 2 بحث شددر مکانیسمهای فرار، هنگامی که یک حالت ازدحام تشخیص داده میشود، روند بررسی مجدد آغاز میشود. شمارش روش اجرا شده توسط عوامل ایده ای در مورد اندازه ازدحام می دهد. فعالسازی روش بررسی مجدد صرفاً به پارامترهای زمان انتظار و آستانه جمعیت مربوط میشود. پارامتر آستانه جمعیت مشخص می کند که چگونه یک عامل درک می کند که آیا یک جمعیت است یا نه، و پارامتر زمان انتظار به یک عامل می گوید که در صورت تشخیص تعارض/ازدحام، چه مدت باید قبل از ادامه حرکت خود منتظر بماند. انتظار میرفت که در طول شبیهسازی، یک مقدار آستانه جمعیت بالاتر، روند بررسی مجدد ایجاد شده توسط عوامل را کاهش دهد. به طور مشابه، انتظار می رفت که با افزایش زمان انتظار،
مکانیسم بررسی مجدد را می توان با تنظیم پارامترها کالیبره و بهینه کرد. در بهینه سازی، پارامترهای زمان انتظار و آستانه جمعیت با در نظر گرفتن چیدمان دفتر تنظیم شدند. برای تنظیم مقادیر بهینه زمان انتظار و آستانه جمعیت برای رویه بازنگری، آزمایشهایی انجام شد در حالی که دانش فضایی، کنار زدن و تبادل اطلاعات غیرفعال بود. میانگین زمان برای فرار همه عوامل به عنوان معیار عملکرد مدل استفاده شد. سپس عملکرد تخلیه به عنوان پارامترهای زمان انتظار و آستانه جمعیت تا زمانی که مقادیر بهینه به دست آمد، مورد تجزیه و تحلیل قرار گرفت. اثرات دو پارامتر بر عملکرد بازنگری در جدول 2 آورده شده است.
همانطور که در جدول 2 نشان داده شده است ، ترکیب بهینه مقادیر برای بازنگری که کوتاه ترین زمان تخلیه را تضمین می کند در مورد 1 مشاهده شد که زمان انتظار و آستانه جمعیت به ترتیب 0.2 ثانیه و 1 بود و در مورد 2 زمانی که زمان تا انتظار و آستانه جمعیت به ترتیب 0.4 ثانیه و 2 بود.
رابطه بین تعداد روشهای بازنگری آغاز شده در حین تخلیه و پارامتر زمان انتظار برای بدترین سناریو در جدول 3 آورده شده است. همانطور که در جدول 3 مشاهده می شود، زمانی که پارامتر دانش فضایی روی true تنظیم شد، همه عوامل بلافاصله کم هزینه ترین مسیر خروجی را تعیین کردند و شروع به حرکت کردند. در بدترین حالت، از آنجایی که اکثر ماموران در یک اتاق بودند، ممکن است همان مسیر کمهزینه را مانند دیگران انتخاب کرده باشند. در این مورد، زمانی که زمان انتظار کم بود، عوامل اغلب تمایل به جستجوی مسیر جایگزین کمهزینه را نشان میدادند. با افزایش زمان انتظار، نمایندگان مسیر کمهزینه خود را با جستجوهای کمتر برای مسیر جایگزین کمهزینه دنبال کردند. هنگامی که پارامتر دانش فضایی روی نادرست تنظیم شد، رفتار مشابهی از عوامل مشاهده شد.
از سوی دیگر، باید توجه داشت که اگر آستانه ازدحام روی مقدار بالاتر از 3 تنظیم شود، ممکن است ازدحام با عوامل کمتر از مقدار مشخص شده رخ دهد. در نتیجه، روند بررسی مجدد ممکن است به درستی راه اندازی نشود و تخلیه موفقیت آمیز تضمین نمی شود.
3.3. نتایج آزمون
شبیه سازی با استفاده از تمام تنظیمات پارامتر ممکن با همه عوامل با استفاده از همه طرح های رفتاری ممکن اجرا شد. شبیه سازی در زمان واقعی اجرا می شود و عوامل ادراکات منحصر به فرد و پویا خود را دارند. بنابراین، شبیهسازی را میتوان دارای ساختار غیر قطعی در نظر گرفت و این ممکن است تأثیر کمی بر عملکرد مدل داشته باشد. آزمایش ها چندین بار برای هر طرح رفتاری تکرار شد و زمان های فرار در طول آزمایش ها برای به دست آوردن میانگین زمان فرار ثبت شد. جدول 4 نتایج آزمون را برای 29 سناریو برای هر دو مورد نشان می دهد. 24 سناریو از 29 سناریو با 6 طرح رفتاری مطابقت دارد. در جدول 4 ، T و F به ترتیب مخفف true و false هستند. آزمون 0 از جدول 1 استخراج شده است، نشان دهنده داده های هر دو مورد با کوتاه ترین زمان تخلیه است. در آزمون 1، تمام پارامترها روی false تنظیم شدند، که نشان دهنده شرایطی است که در آن عوامل دانش فضایی نداشتند و طرح رفتاری تعریف نشده بود. تستهای 2 تا 4 میانگین نتایج فرار را زمانی نشان میدهند که تنها یک مکانیسم فعال بود.
برای ایجاد یک طرح سلسله مراتبی بیش از یک مکانیسم مورد نیاز است. بنابراین، نتایج پنج آزمون اول باید مستقل از طرح تفسیر شود. هنگامی که هیچ یک از مکانیسم ها فعال نشد، فرآیند تخلیه شکست خورد. در تست های 1 و 3، 14 نفر از 16 مامور برای مورد 1 و نیمی از ماموران مورد 2 به دلیل درگیری نتوانستند به هیچ یک از خروجی ها برسند، بنابراین تخلیه ناموفق بود. آزمون 3 نشان می دهد که تبادل اطلاعات به تنهایی همیشه برای یک راه حل کافی نیست. با این حال، هنگامی که تبادل اطلاعات با یک یا چند مکانیسم اضافی حل تعارض ترکیب شد، مانند آزمونهای 5، 7، و 8، مدل پایدار بود و همیشه راهحلی پیدا میکرد. در تستهای 2 و 4، مکانیسم بازنگری به تنهایی به تخلیه موفقیتآمیز برای هر دو مورد با عملکرد بهتر در مقایسه با دور زدن دست یافت.
برنامه های رفتاری مربوط به 24 سناریو از 29 سناریو به عنوان 12 طرح سلسله مراتبی در جدول 5 خلاصه شده است.
جدول 5 ترکیب دو و سه گانه اقدامات رفتاری را در یک طرح سلسله مراتبی نشان می دهد. عملکرد تخلیه ترکیب های دوتایی در یک طرح را می توان برای ارزیابی تأثیر ترتیب اقدامات در یک سلسله مراتب مقایسه کرد، به عنوان مثال، IR در مقابل RI، و استفاده از اقدامات با جایگزین های دیگر مانند IR در مقابل IS. سپس تأثیر هر اقدام بر عملکرد تخلیه طرح سلسله مراتبی با ترکیبات سه گانه قابل ارزیابی است.
برای طرحبندی بدترین حالت (مورد 1)، آزمایشهای 5، 9 و 21 با طرح IR منجر به بهترین عملکرد تخلیه پایدار در میان ترکیبهای باینری از اقدامات شدند. از سوی دیگر، طرح IS (آزمون های 7، 19، 23) بهترین عملکرد تخلیه پایدار را برای مورد 2 ایجاد کرد. تست های 13، 17، و 25 و آزمون های 5، 9 و 21 نشان دادند که اگر سلسله مراتب از RI تغییر کند. به IR، عملکرد تخلیه برای هر دو مورد بهبود یافته است. نتایج مشابهی در هر دو مورد برای تغییرات سلسله مراتبی SI (آزمون های 11، 15، 27) به IS (آزمون های 7، 19، 23) و SR (آزمون های 6، 10، 26) به RS (آزمون های 14، 18، 22) مشاهده شد. . هنگامی که عملکرد تخلیه پایدار برای ترکیب های باینری به صورت نزولی مرتب شد، معادله (9) برای مورد 1 و معادله (10) برای مورد 2 به دست آمد:
مقایسه معادلات (9) و (10) نشان می دهد که تعیین تبادل اطلاعات به عنوان اولین اقدام، عملکرد تخلیه را با کوتاه کردن میانگین زمان فرار بهبود می بخشد. به عبارت دیگر، تبادل اطلاعات تنها زمانی می تواند به عنوان سریع ترین مکانیسم حل تعارض/تراکم در نظر گرفته شود که با مکانیسم های دیگر ترکیب شود. با این حال، این تنها مکانیزمی است که در صورت استفاده به تنهایی، راه حل پایدار را تضمین نمی کند. به طور مشابه، مقایسه معادلات (9) و (10) نشان میدهد که دومین مکانیسم مؤثر در صورت بهینهسازی پارامترهای زمان انتظار و آستانه جمعیت، بررسی مجدد است. بنابراین، سلسله مراتب را می توان به عنوان تبادل اطلاعات – بازنگری – کنار گذاشتن اطلاعات (IRS) طبقه بندی کرد، جایی که تبادل اطلاعات بالاترین رتبه را در طرح دارد. تست 24 در جدول 5تأیید می کند که طرح IRS بهترین عملکرد را برای هر دو مورد در مقایسه با سایر ترکیبات سه گانه اقدامات رفتاری در یک طرح سلسله مراتبی به دست آورد.
ماهیت مشکلات خروج اضطراری می تواند از بسیاری جهات متفاوت باشد. چند مطالعه تخلیه اضطراری در ادبیات وجود دارد که می تواند مرتبط با رویکرد ما در نظر گرفته شود. جدول 6 مقایسه ای از مطالعه ما با دیگران را از نظر عملکرد تخلیه خلاصه می کند. مطالعات موجود از دانش مکانی یا آگاهی موقعیتی یا هر دو به عنوان پارامترهایی برای اطلاع رسانی به عوامل در مدل های خود استفاده می کنند. آگاهی موقعیتی عوامل را در مورد مکان مناطق خطرناک و خروجی ها آگاه می کند و بنابراین می تواند شبیه به دانش فضایی در مطالعه ما تفسیر شود.
یک رویکرد ساده [ 11 ] تقسیم جریان با استفاده از موانع در جلوی خروجی ها برای کنترل تشکیل تراکم، توانست زمان تخلیه را تا 10.4٪ کاهش دهد. یک مدل تخلیه که برای ساختمانهای مرتفع [ 12 ] ساخته شده بود، زمانی که به عوامل آگاهی موقعیتی ارائه شد، 24 درصد بهبود عملکرد را به دست آورد. مدل عامل تخلیه هدایتشده (GAM) [ 13 ] منجر به بهبود 28.5 درصدی در زمان تخلیه شد، زمانی که عوامل اعضای خدمه به عنوان راهنما برای هدایت سایر عوامل بر اساس برنامههای تخلیه بهینه استفاده شدند. شبیه سازی های ارائه شده در [ 14] تاکید کرد که بهینه سازی مدیریت یک عامل کلیدی در عملکرد تخلیه است. زمان تخلیه از ساختمان تا 25.2٪ بهبود یافته است، زمانی که موارد در مسیرهای تخلیه با بهینه سازی مدیریت حذف شدند. در تحقیقات مبتنی بر یک مدل شبکه طولانی مدت برای تخلیه با بهینه سازی [ 15 ]، مدل تخلیه برنامه ریزی شده تا 31٪ تخلیه سریعتر را به دست آورد. الگوریتم برنامه ریزی تخلیه پارتیشن بندی شده و مرحله ای (PSEP) برای تخلیه چند خروجی [ 16 ]، که نیاز به تقسیم و پردازش برنامه ریزی تخلیه در گروه های کوچکتر برای کاهش پیچیدگی مشکل دارد، با کاهش هزینه محاسباتی در مقایسه با مدل، کارایی مشابهی داشت. در [ 15 ].
همانطور که در جدول 6 نشان داده شده است ، مطالعات بیشتر بر شرایط محیطی فیزیکی متمرکز شده اند، در حالی که این مقاله بر شبیه سازی رفتار سلسله مراتبی اجتماعی عوامل در شرایط اضطراری با شرایط تحت نظارت (با دانش مکانی) و بدون نظارت (بدون اطلاعات مکانی) تمرکز دارد. مدل برنامه ریزی رفتار سلسله مراتبی (HBP) ارائه شده در این مقاله زمانی که دانش فضایی در دسترس عوامل نبود، به بهبود عملکرد 23.14 درصد دست یافت. هنگامی که عوامل با دانش فضایی عرضه شدند، مانند سایر مطالعات جدول 6 ، مدل پیشنهادی تا 32.78٪ بهبود عملکرد تخلیه در محیط شبیه سازی شده را نشان داد.
4. نتیجه گیری
در این مقاله، یک مدل رفتار سلسله مراتبی برای یک سیستم چند عاملی با قابلیت های فرار و حافظه پویا شبیه سازی رفتار اجتماعی در یک محیط اداری در شرایط اضطراری ارائه شده است. مکانیسمهای اجتناب از برخورد، مذاکره، راهحل تعارض و برنامهریزی مسیر برای شبیهسازی رفتارهای عوامل استفاده شد.
نتایج آزمون ثابت میکند که مکانیسمهای مدل پیشنهادی دارای ویژگیهای متفاوتی هستند که در موقعیتهایی که سلسله مراتبهای متفاوتی مورد نیاز است، به خوبی با یکدیگر تناسب دارند. هر مکانیزم در سطح متفاوتی به عملکرد تخلیه کمک می کند. رتبههایی که اولویتها را در سلسله مراتب تعریف میکنند، میتوانند بهعنوان تبادل اطلاعات – بازنگری – کنار گذاشتن طبقهبندی شوند، جایی که تبادل اطلاعات بالاترین رتبه را در طرح دارد. تبادل اطلاعات بیشترین کمک را به پیشگیری از درگیری/ازدحام، بازنگری در حل تعارض/ازدحام، و کنار زدن در عملکرد تخلیه، با ویژگی حل تعارض، داشته است. درجه مشارکت به دخالت یکی یا هر دو مکانیسم بستگی دارد. زمانی که سلسله مراتب IRS اعمال شد، کمترین سهم را داشت. سهم رفتارها نیز به شدت به شرایط محیطی وابسته بود. مکانیسمهای مورد استفاده در مدل سلسله مراتبی بهصورت سست جفت شدهاند و میتوانند به راحتی تغییر یابند. بنابراین، روشهای کالیبراسیون مکانیسم پیشنهادی توانایی مدل را برای انطباق با موقعیتهای مختلف افزایش میدهد.
الگوریتم DMM در مدل، راه حلی برای مشکل در دسترس نبودن دانش فضایی قبلی، که اکثر رویکردهای تخلیه به آن نیاز دارند، ارائه می دهد. الگوریتم DDM نقشه را با هماهنگی با مکانیسم تبادل اطلاعات بررسی می کند. DMM با یک طرح رفتار سلسله مراتبی به بهبود عملکرد 23.14٪ در زمان فرار بدون ارائه اطلاعات اولیه محیطی به عوامل دست یافت.
اگرچه مدل پیشنهادی بر روی ساختار گراف-شبکه آزمایش شد، اما برای هر ساختار محیطی مبتنی بر نمودار قابل اجرا و سازگار است. در این مورد، باید توجه داشت که الگوریتم مسیریابی و تابع اکتشافی ممکن است نیاز به سفارشی سازی داشته باشد. نتایج شبیهسازی نشان میدهد که مدل پیشنهادی با موفقیت رفتار اجتماعی عوامل را نشان میدهد. بنابراین، این مدل ممکن است برای حمایت از برنامهریزان تخلیه اضطراری، ارائه شبیهسازی با رفتارهای اجتماعی سلسله مراتبی مختلف عوامل استفاده شود. مطالعات بعدی ما بر پیشرفت و تطبیق مدلهای رفتار سلسله مراتبی با محیطها و سناریوهای مختلف، مانند جستجو و نجات مشارکتی در موقعیتهای فاجعه متمرکز خواهد بود.





بدون دیدگاه