1. معرفی
سیستمهای پوشش در رودخانههای شهری برای محافظت از سواحل رودخانهها، زیرساختها و مردم در تلاش برای کنترل سیلها ساخته میشوند. روکش ها معمولاً به عنوان محافظ شیب طراحی می شوند و با بتن پوشانده می شوند [ 1 ]. سیل ها می توانند باعث فرسایش روکش شوند تا به طور مداوم روکش ها را ضعیف کرده و باعث آسیب شوند. علاوه بر این، روکش ها توسط عوامل پیچیده ای مانند فرونشست زمین، فروریختن زمین، فرسایش، حضور پوشش گیاهی، تخریب بستر رودخانه و دخالت انسان آسیب می بینند [ 2 ، 3 ]. بنابراین، نظارت بر وضعیت روکشها یک وظیفه ضروری در مدیریت زیرساختهای دفاع در برابر سیل و در ارائه شواهد برای نگهداری یا بهبود مهم است [ 4 ].
در حال حاضر، مطالعاتی برای ارزیابی وضعیت روکش ها با استفاده از داده های سنجش از دور در کشورهایی مانند انگلستان [ 4 ] و فرانسه [ 5 ] انجام شده است.]، اما این روش ها برای نظارت بر روکش شهری قابل اجرا نیستند و ارزیابی وضعیت روکش ها توسط آژانس مدیریت مهندسی شهرداری در چین به صورت بصری بازرسی می شود. با این حال، بازرسی بصری میدانی برای به دست آوردن اطلاعات کامل در مورد روکش ها زمان بر و از نظر فنی پیچیده است. علاوه بر این، ارزیابی وضعیت زیرسطحی روکش ها دشوار است زیرا بازرسی بصری در بررسی علائم مهم مانند فروریختن سطح ترجیح داده می شود. به طور قابل توجه، تشخیص زودهنگام آسیب در امکان تعمیر و نگهداری و بهبود از قبل قبل از وقوع خرابی بیشتر بسیار سودمند است [ 4 ].
جدای از بازرسی بصری میدانی، فناوریهای
سنجش از راه دور مانند فتوگرامتری مبتنی بر وسایل نقلیه هوایی بدون سرنشین (پهپاد)، تکنیکهای مفیدی برای ایجاد مدلهای سطح دیجیتال (DSM) بوده و همچنین به دلیل مزایایی که در سطح بالا دارند، به طور گسترده در به دست آوردن اطلاعات پوشش استفاده میشوند. -بازسازی هندسه سه بعدی (3D) دقیق [ 6 ، 7 ، 8 ]. اسکن لیزری زمینی معمولاً برای نظارت بر آسیب پوشش ناشی از فرسایش روکش در مناطق کوچک و نه در مناطق بزرگ استفاده می شود [ 9 ، 10 ، 11 ]]. این روش به اندازه گیری های مکرر نیاز دارد که معمولاً شامل سنسورهای گران قیمت و لجستیک میدانی هنگام نظارت بر مناطق بزرگ است. به عنوان مثال، اسکن لیزری هوا برای تخمین تغییر حجم در دیوارههای دره رودخانه ناشی از فرسایش پوشش [ 12 ]، و ابرهای نقطهای برای تجزیه و تحلیل حفاظت از یک ساحل صخرهای پوشش استفاده شد [ 13 ]. پای و همکاران [ 14 ] فرسایش ساحل و تپه های شنی و برافزایش را برای مدیریت ساحلی ارزیابی کرد. ترنات و همکاران [ 15] سازه های مرتبط با آب را برای کمک به طراحی روکش ها مدل سازی کرد. اگرچه حسگرها تولید نقاط سه بعدی متراکم را برای بازسازی خوب ساختار هندسی برای نظارت بر روکش امکان پذیر میسازند، ابرهای نقطهای نمیتوانند مستقیماً بافت رنگی پوشش را فراهم کنند و در تفسیر آسیب پوششها کمتر بصری هستند. در نتیجه، حذف نویز در ابرهای نقطه ای دشوار است. بخشی از سطح روکش معمولاً ممکن است با پوشش گیاهی (مثلاً چمن) پوشیده شده باشد که به صورت نقاط سه بعدی در مقادیر نوسان ارتفاع در ابرهای نقطه متراکم ظاهر می شود. پلتفرم های دیگری برای نظارت بر روکش استفاده شده است [ 16]، اما این سکوها در مناطق خاصی با آب کم عمق مانند رودخانه های شهری نامناسب هستند. در همین حال، ابرهای نقطه سه بعدی مشتق شده از این حسگرها ممکن است بسیار گرانتر از همتای مشتق شده از تصویر خود باشند، مانند فتوگرامتری مبتنی بر پهپاد درجه یک مصرف کننده [ 17 ، 18 ، 19 ]. علاوه بر این، ابرهای نقطه سه بعدی حاصل از تصویر از فتوگرامتری پهپاد می توانند ساختار دقیق فضایی سطح زمین را ثبت کنند و دقت رقابتی بیشتری را در مقایسه با محصولات مبتنی بر اسکن لیزری ارائه دهند [ 20 ]]. در مقایسه با اسکن لیزری، نقاط کنترل زمینی (GCPs) در فتوگرامتری هوایی مورد نیاز است و اندازه گیری GCP یک کار وقت گیر است. خوشبختانه، چندین GCP را می توان یک بار از قبل علامت گذاری و اندازه گیری کرد، یعنی برای جمع آوری GCP ها برای جهت گیری مطلق به اندازه گیری های متعدد نیاز نیست. بنابراین، اگرچه اسکن لیزری می تواند ابرهای نقطه سه بعدی با وضوح بالا و متراکم ایجاد کند، این فناوری به عملیات پیچیده تری نیاز دارد و هزینه بیشتری در هنگام جمع آوری اطلاعات پوشش در رودخانه های شهری نسبت به نقشه برداری مبتنی بر پهپاد کم هزینه دارد. در این مطالعه، یک پلت فرم پهپاد ارزان قیمت مجهز به یک دوربین آنبورد درجه یک مصرف کننده (به عنوان مثال، کوادکوپترهای فانتوم DJI) برای اثبات مناسب بودن آن برای تشخیص علائم آسیب با توجه به سطوح روکش با جزئیات ریز استفاده شده است.
در سالهای اخیر، تحقیقات روی پهپاد بر روی درک و مدلسازی روکشها متمرکز شده است و دادههای سه بعدی با وضوح بالا که از نقشهبرداری پهپاد کمهزینه به دست میآیند، به طور گسترده در نظارت کارآمد و دقیق روکشها برای اجرای استراتژیهای مدیریت نگهداری مربوطه استفاده شده است [ 19 ]. , 21 , 22 , 23 , 24 , 25 ]. هالرمن و همکاران [ 21 ] و Kubota و همکاران. [ 22 ] از ابرهای نقطه ای متراکم به دست آمده از فتوگرامتری پهپاد کم هزینه برای تجسم تغییر شکل روکش ها در ارزیابی پایداری سازه استفاده کرد. پیتمن و همکاران [ 19] وضوح بالا و دقت رقابتی DSM روکشهای حاصل از نقشهبرداری مبتنی بر پهپاد را به دست آورد و نتایج را با نتایج حاصل از سیستمهای موقعیتیابی جهانی سینماتیک بلادرنگ (RTK GPS) مقایسه کرد و امکانات جدیدی (یعنی استفاده از پهپادها) برای اندازهگیری ارائه کرد. نظارت و درک تغییر شکل روکش ها در برابر رویکردهای مشاهدات ژئومورفولوژی سنتی. این روش DSM با دقت بالایی را به دست میآورد که تقریباً برابر با آنهایی است که از طریق اسکن لیزری هوابرد به دست میآید. اگرچه تحقیقات آنها می تواند یک ساختار هندسی سه بعدی خوب از پوشش را با استفاده از نقشه برداری مبتنی بر پهپاد برای نظارت بازسازی کند، آنها تشخیص آسیب خودکار از ابرهای نقطه ای مشتق شده از تصویر را نادیده گرفتند. علاوه بر این، نقشه برداری فتوگرامتری با استفاده از پهپاد اغلب برای نظارت بر تغییرات در روکش ها برای مدیریت رودخانه استفاده شده است. پیرس و همکاران26 ] نقشه برداری و نقشه برداری فتوگرامتری را در مدل پوشش برای بررسی دینامیک ساحلی و تکامل خط ساحلی ترکیب کرد و به مدیریت ساحل کمک کرد. جیسون و همکاران [ 25] از فتوگرامتری پهپاد برای بازسازی توپوگرافی پوشش دلتا برای تجزیه و تحلیل تغییرات در رسوبات ساحل استفاده کرد. اگرچه بسیاری از کاربردها در نظارت بر روکش با استفاده از فتوگرامتری پهپاد کم هزینه موثر هستند، مطالعات در مورد استفاده از نقشه برداری مبتنی بر پهپاد برای تشخیص آسیب پوشش در امتداد رودخانه های شهری به ندرت گزارش شده است. مهمتر از همه، اثربخشی و کارایی تشخیص آسیب مبتنی بر پهپاد دو شاخص است که تعیین می کند آیا این رویکرد می تواند اعمال شود یا خیر. علاوه بر این، کیفیت و کارایی تولید ابر نقطهای برای مشخص کردن دقیق سطح پوشش بسیار مهم است، و قابلیت اطمینان تولید امضای آسیب از ابرهای نقطه مشتقشده نیز به همان اندازه برای تشخیص آسیب در روکشها مهم است.
روکش ها در امتداد رودخانه های شهری معمولاً به صورت شیب نسبتاً مسطح یا سطح منحنی طراحی می شوند، یعنی سطح روکش به طور کلی یک سطح نامنظم ساده است که می تواند با استفاده از یک تابع ریاضی مدل شود. بر این اساس، این مطالعه یک رویکرد مبتنی بر ابر نقطه متراکم را پیشنهاد میکند که از فتوگرامتری کمهزینه مشتق شده است تا نشانههای آسیب پوشش را از یک تصویر شدت شیب بهجای دادههای چندزمانی پیشنیاز استخراج کند. برای شناسایی آسیب پوشش در امتداد رودخانه های شهری، اطلاعات مربوط به سطوح روکش آسیب دیده و آسیب دیده به طور کلی برای مقایسه و تجزیه و تحلیل مورد نیاز است. در بسیاری از موارد، اطلاعات قبلی در مورد سطوح بدون آسیب معمولاً در مدیریت مهندسی شهرداری به دست نمیآید یا به خوبی بازسازی نمیشود. عدم جمع آوری داده های تاریخی مربوط به سطح پوشش ممکن است به دلیل درک نامشخص از امضای آسیب، منجر به مدیریت ضعیف پوشش شود. به عنوان جایگزینی برای برنامه های کاربردی وابسته به داده های چند زمانی [20 ، 25 ]، ما از رویکردی برای تشخیص آسیب پوشش استفاده می کنیم که نیازی به بازسازی سطح بدون آسیب یا اطلاعات قبلی ندارد. بر اساس این فرض که سطح روکش تقریباً شیب مشابهی دارد، ابرهای نقطه متراکم ابتدا به تصویری با شدت شیب تبدیل میشوند، که در آن استخراج ویژگی برای ایجاد ویژگیهای آسیب پوشش انجام میشود. یک عملگر گرادیان چند مقیاسی (SMGO) برای جمعآوری اطلاعات آسیب با استفاده از عملیات همهجهت (افقی، عمودی، و مورب)، بهویژه در استخراج ویژگی پیشنهاد شدهاست. SMGO برای اطمینان از اینکه آسیب در مقیاس های مختلف می تواند به طور دقیق استخراج شود استفاده می شود.
هدف این مطالعه بهرهبرداری از جریان کار تشخیص آسیب پوشش در امتداد رودخانههای شهری از طریق ابرهای نقطه متراکم ناشی از فتوگرامتری پهپاد ارزانقیمت است، و ابر نقطه پیشنهادی و تولید امضای آسیب هر دو برای شناسایی آسیب با استفاده از نقشهبرداری مبتنی بر پهپاد معرفی شدهاند. سهم اصلی این مطالعه رویکرد پیشنهادی مبتنی بر ابرهای نقطه فتوگرامتری است که امکانات جدیدی را در تشخیص آسیب پوشش ارائه میدهد. در رویکرد ما، تطبیق متراکم پیکسل به پیکسل به طور همزمان با ترکیب منطقه در حال رشد و تطبیق نیمه جهانی (SGM) استفاده میشود، که میتواند با در نظر گرفتن مشارکت نقاط شی سهبعدی مجاور، سطح با جزئیات دقیق یک روکش را بازسازی کند. به خصوص،
2. منطقه مطالعه و مواد
2.1. سایت تست
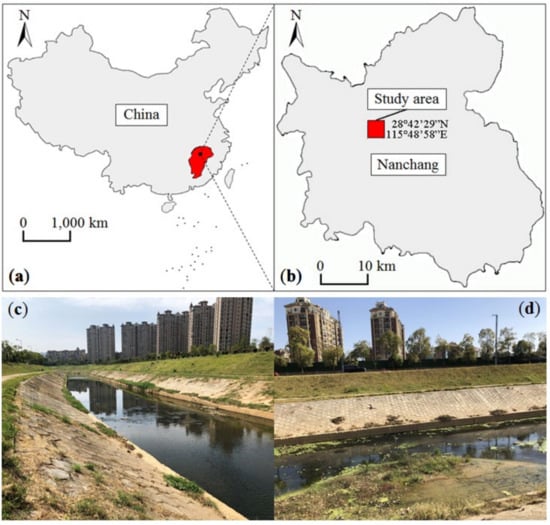
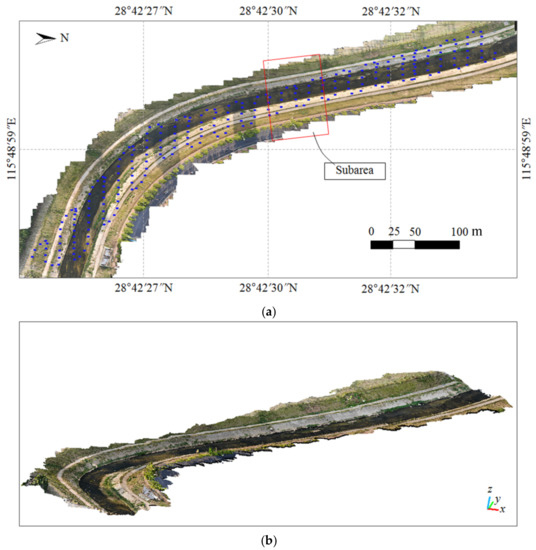
شهر نانچانگ (28°42’29’N، 115°48’58’E) در استان جیانگشی، چین ( شکل 1 a,b)، منطقه مورد مطالعه این کار است. این مطالعه از یک پهپاد کوادکوپتر ارزان قیمت (یعنی DJI Mavic Air؛ DJI؛ Shenzhen، چین) برای بررسی روکشهای کنار رودخانههای شهری و دو قسمت (به ترتیب به طولهای 450 و 570 متر) از روکش بتنی واقع در غرب شهر نانچانگ برای آزمایش ( شکل 1 ج) به دلایل زیر انتخاب شد: انواع مختلفی از سازههای دفاعی ساحل رودخانه در امتداد بخشهای مختلف ساحل برای مدیریت تأثیر فرسایش رودخانهای جانبی ساخته شدهاند، از جمله این سازهها، روکش به طور معمول با یک زاویه شیب برای محافظت از سواحل رودخانه و زیرساخت ها در رودخانه های شهری طراحی شده است [ 25 ]]. آبراه اغلب با مواد سیلت و سنگریزه پوشانده می شود و پس از آن ممکن است تعداد زیادی رسوب به حرکت درآمده و همراه با رویدادهای شدید بارندگی باعث فرسایش پوشش شود. علاوه بر وجود حرکات توده ای، عوامل خارجی پیچیده مانند نفوذ آب های زیرزمینی نیز به طور قابل توجهی در فرسایش پوشش و آسیب نقش دارند. روکش ها از نظر مورفولوژیکی با استفاده از شیب تقریباً برابر با 40 درجه مشخص می شوند. زیرزمین آبراه از نظر زمین شناسی شامل رسوبات تثبیت نشده از رس، ماسه سست، و رسوبات شن است. روکش ها معمولاً با علف های هرز پوشیده می شوند و به طور مداوم تحت تأثیر فرسایش رودخانه ای جانبی، ریزش زمین و تخریب بستر رودخانه قرار می گیرند.
2.2. دستیابی به تصاویر سنجش از راه دور پهپاد و اندازه گیری نقاط کنترل زمینی (GCP)
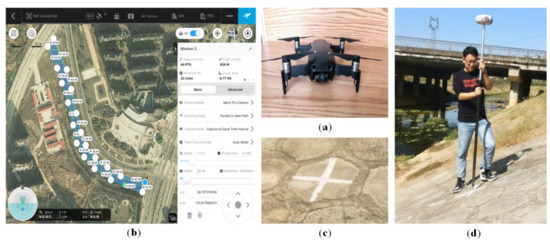
با توجه به عملکرد کم هزینه و انعطاف پذیر آن، یک کوادکوپتر درجه یک مصرف کننده DJI Mavic Air (DJI؛ شنژن، چین) [ 27 ، 28 ] ( شکل 2 a) برای گرفتن تصاویر سنجش از دور با رنگ واقعی با وضوح بالا در آگوست 2019 انتخاب شد. علاوه بر این، DJI Mavic Air با وزن 430 گرمی و طراحی تاشو به راحتی حمل می شود، نیازی به مکانی برای برخاستن و فرود حرفه ای ندارد و کار با هواپیما ساده است و برنامه های پروازی انعطاف پذیری را برای انواع ماموریت ها امکان پذیر می کند. . اپراتور میتواند با خیال راحت پوشش را حتی تحت فتوگرامتری ارتفاع بسیار کم در مناطق شهری از طریق فناوریهای امضاکننده DJI، مانند اجتناب از مانع و حالتهای پرواز هوشمند، نظارت کند [ 27 ]]. پلتفرم DJI ارزان، کارآمد است و به حداقل تخصص نیاز دارد. چندین برنامه کاربردی کاربرپسند ارائه شده توسط DJI، از جمله Ground Station Pro و یک بسته نرم افزاری برنامه ریزی ماموریت، برای انجام پروازهای خودمختار با نقاط بین راه و جهت گیری نادری از دوربین درجه مصرف کننده در حین به دست آوردن تصاویر مبتنی بر پهپاد از سنجش از راه دور استریو استفاده شدند. 28 ]. شکل 2b (قسمت 1) نمونه ای از وسعت نظرسنجی و برخی پارامترهای نظرسنجی در رابط کاربری گرافیکی این برنامه بررسی پهپاد را نشان می دهد. پارامترهایی مانند ارتفاع پرواز، سرعت پرواز و همپوشانی تصویر را می توان بر اساس ماموریت بررسی به دست آورد. برای به دست آوردن تصاویر سنجش از دور با وضوح بالا و بدون تاری، یک پرواز در ارتفاع پایین با سطح بالای زمین 30 متر و سرعت پرواز 2.8 متر بر ثانیه برای کاهش محدودیتهای جوی و محیطی انجام شد. بنابراین، فاصله نمونه زمین تقریباً برابر با 2.0 سانتی متر بر پیکسل بود. برای اطمینان از قابلیت اطمینان تطابق تصویر با همپوشانیهای بزرگ، همپوشانیهای تصویر جلو و کناری به ترتیب روی 80% و 60% تنظیم شدند. پس از تنظیم پارامترهای پرواز، پهپاد تا حد زیادی خودکار شد و اپراتور تصاویر سنجش از راه دور را تحت سرعت باد به دست آورد < 10 متر بر ثانیه و شرایط بدون باران. کل زمان پرواز نقشه برداری پهپاد در دو قسمت (450 و 570 متر) روکش بتنی در حاشیه رودخانه های شهری حدود 10 و 14 دقیقه (کمتر از حداکثر زمان پرواز 21 دقیقه) بوده و با یک بار شارژ باتری قابل دستیابی است. . این پهپاد تقریباً 232 و 287 تصویر از دو قسمت گرفته تا منطقه مورد مطالعه را پوشش دهد، که همچنین شامل یک وسعت بافر تقریباً 15 متر در نزدیکی پوشش است. علاوه بر این، برای بهبود عملکرد تطبیق تصویر، خطاهای سیستم و جهتگیری داخلی دوربین درجه مصرفکننده با استفاده از روشهای موجود در مطالعه قبلی حذف شدند. کل زمان پرواز نقشه برداری پهپاد در دو قسمت (450 و 570 متر) روکش بتنی در حاشیه رودخانه های شهری حدود 10 و 14 دقیقه (کمتر از حداکثر زمان پرواز 21 دقیقه) بوده و با یک بار شارژ باتری قابل دستیابی است. . این پهپاد تقریباً 232 و 287 تصویر از دو قسمت گرفته تا منطقه مورد مطالعه را پوشش دهد، که همچنین شامل یک وسعت بافر تقریباً 15 متر در نزدیکی پوشش است. علاوه بر این، برای بهبود عملکرد تطبیق تصویر، خطاهای سیستم و جهتگیری داخلی دوربین درجه مصرفکننده با استفاده از روشهای موجود در مطالعه قبلی حذف شدند. کل زمان پرواز نقشه برداری پهپاد در دو قسمت (450 و 570 متر) روکش بتنی در حاشیه رودخانه های شهری حدود 10 و 14 دقیقه (کمتر از حداکثر زمان پرواز 21 دقیقه) بوده و با یک بار شارژ باتری قابل دستیابی است. . این پهپاد تقریباً 232 و 287 تصویر از دو قسمت گرفته تا منطقه مورد مطالعه را پوشش دهد، که همچنین شامل یک وسعت بافر تقریباً 15 متر در نزدیکی پوشش است. علاوه بر این، برای بهبود عملکرد تطبیق تصویر، خطاهای سیستم و جهتگیری داخلی دوربین درجه مصرفکننده با استفاده از روشهای موجود در مطالعه قبلی حذف شدند.28 ].
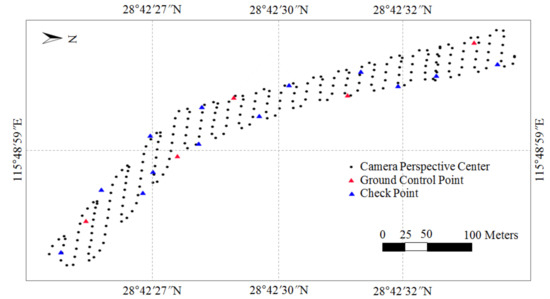
علاوه بر این، 40 GCP به طور مساوی بر روی پوشش توزیع شده است. GCPها در سراسر منطقه مورد مطالعه قرار گرفتند و برای تأیید صحت DSM مبتنی بر تصویر با استفاده از RTK GPS اندازهگیری شدند. همانطور که در شکل 2 ج نشان داده شده است GCP ها در سایت علامت گذاری شدند . ابرهای نقطه متراکم پیکسل به پیکسل به ترتیب با 5 و 7 GCP برای قسمتهای 1 و 2 ارجاع داده شدند. 28 GCP دیگر (به ترتیب 13 و 15 GCP برای قسمت های 1 و 2) به عنوان نقاط چک (CPs) انتخاب شدند که برای ارزیابی دقت بازسازی سطح روکش استفاده شد.
3. روش
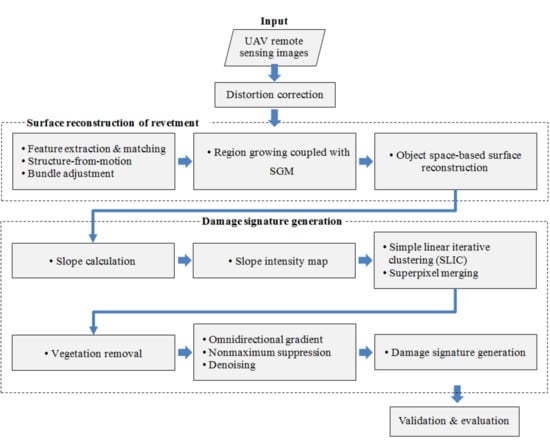
هدف این مطالعه بهرهبرداری از گردش کار تشخیص آسیب پوشش در امتداد رودخانههای شهری از طریق ابرهای نقطهای متراکم ناشی از فتوگرامتری پهپاد ارزانقیمت است و ابر نقطه پیشنهادی و تولید امضای آسیب هر دو برای رسیدگی به تشخیص آسیب با استفاده از نقشهبرداری مبتنی بر پهپاد معرفی شدهاند. رویکرد پیشنهادی نشان داده شده در شکل 3 عمدتاً شامل مراحل زیر است:
(1) فناوریهای فتوگرامتری برای تولید ابرهای نقطهای متراکم پیکسل به پیکسل با دقت بالا برای بازسازی سطح روکش از طریق یک سری مراحل استفاده میشوند، یعنی استخراج ویژگی و تطبیق، ساختار افزایشی از حرکت (SfM)، تنظیم بسته نرم افزاری و رشد منطقه همراه با SGM.
(2) نقشه شدت شیب پوشش بر حسب ارتفاع ابرهای نقطه متراکم محاسبه و تولید می شود. سپس مناطق پوشش در هر دو طرف در امتداد رودخانه شهری با تقسیمبندی و ادغام سوپرپیکسلها استخراج میشوند که بر روی نقشه شدت شیب با استفاده از یک الگوریتم مبتنی بر خوشهبندی تکراری خطی (SLIC) تولید میشوند.
(3) امضای آسیب پوشش از تصویر شدت شیب از طریق حذف پوشش گیاهی، عملیات شیب همه جانبه و سرکوب غیر حداکثری، و حذف نویز ایجاد میشود.
(4) ارزیابی دقت برای تأیید صحت ابرهای نقطه متراکم حاصل از الگوریتم (یعنی منطقه در حال رشد همراه با SGM) و ارزیابی عملکرد تشخیص آسیب پوشش در امتداد رودخانههای شهری با تجزیه و تحلیل کمی (به عنوان مثال، شاخصهایی مانند دقت ، یادآوری ، و F 1 _score ) و ارزیابی بصری (یعنی مشاهده میدانی زمین).
3.1. بازسازی سطح روکش
دوربین نصب شده بر روی پهپادهای ارزان قیمت (به عنوان مثال، کوادکوپترهای DJI Phantom درجه مصرف کننده) دارای اعوجاج چشم انداز بزرگ و هندسه دوربین ضعیف است [ 28 ، 29 ]، که ممکن است باعث خطاهای سیستماتیک شود که باید با استفاده از تصحیح اعوجاج برای هر پهپاد حذف شوند. تصویر سنجش از دور مشابه مطالعات قبلی [ 18 ]، دوربین دیجیتال باید دقیقاً قبل از عملیات عکاسی هوایی کالیبره شود. تصحیح اعوجاج سپس با استفاده از پارامترهای دوربین و دو ضریب اعوجاج شعاعی و مماسی انجام میشود که از چندین نمای یک الگوی کالیبراسیون دو بعدی (2 بعدی) محاسبه میشود. این پارامترها با تنظیم بسته خود کالیبره زیر بیشتر بهینه می شوند.
مشابه مطالعات قبلی، استخراج و تطبیق ویژگی با استفاده از یک عملگر فرعی هریس همراه با الگوریتم تبدیل ویژگی تغییر ناپذیر مقیاس انجام میشود، که میتواند نقاط متناظر با توزیع یکنواخت را حتی در مناطق همپوشانی تصاویر سنجش از دور با تغییر روشنایی و بافت ضعیف پیدا کند. 30]. در فتوگرامتری هوایی سنتی، موقعیتهای دوربین هوابرد، یعنی موقعیتها و جهتگیریها، باید برای ارائه پارامترهای جهتگیری خارجی اولیه برای انجام مثلثسازی هوایی شناخته شوند. با این حال، پلتفرمهای ارتفاع پایین، مانند پهپادهای ارزان قیمت مصرفکننده، معمولاً هنگام بهدست آوردن اطلاعات موقعیتها و جهتگیری دوربینها، روی تجهیزات با دقت بالا نصب نمیشوند. از این رو، مثلث بندی هوایی سنتی با تکیه بر پارامترهای جهت گیری خارجی اولیه ممکن است برای مثلث بندی هوایی مبتنی بر پهپاد در دسترس نباشد. الگوریتمهای SfM مبتنی بر پهپاد برای عقبنشینیهای بانکی در جریانها اعمال شدهاند، و این مطالعه میتواند DSM را با خطاهای کوچکتری در مقایسه با استفاده از اسکن لیزری زمینی ایجاد کند [ 31 ]]. بنابراین، SfM برای تخمین موقعیتهای دوربین هوابرد و بازسازی یک هندسه سهبعدی پراکنده برای تصاویر همپوشانی بدون کمک پارامترهای جهتگیری خارجی اولیه استفاده میشود [ 18 ]. قابل توجه است که SfM افزایشی [ 32 ، 33 ] در این مطالعه برای بازسازی مدل پراکنده 3 بعدی به طور فزاینده و تکراری استفاده می شود، زیرا امکان بازسازی سه بعدی را در یک فرآیند افزایشی برای تنظیمات مکرر بسته خود کالیبره (یعنی نرم افزار تنظیم بسته پراکنده [ 34 ]) فراهم می کند. برای بهینه سازی مدل سه بعدی و پارامترهای جهت گیری داخلی و خارجی.
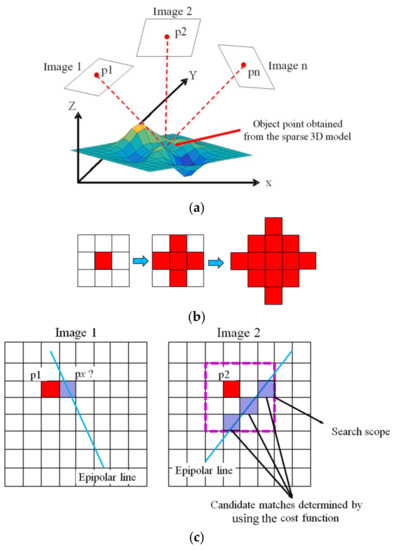
برخلاف تولید DSM از طریق درونیابی دادههای ارتفاعی مبتنی بر نقطه [ 35 ]، یک روش جدید رشد منطقه همراه با SGM برای تطابق متراکم در شکل 4 نشان داده شده است.برای تولید ابرهای نقطهای متراکم پیکسل به پیکسل و بازسازی سطح با جزئیات ریز پوشش مورد سوء استفاده قرار میگیرد. الگوریتم SGM یک تکنیک محبوب برای به حداقل رساندن هزینه تطبیق تصویر در طول چندین مسیر یک بعدی از طریق تصاویر برای بازسازی سه بعدی مبتنی بر تصویر است و ممکن است هزینه محاسباتی را برای اکثر برنامه های نقشه برداری که عمدتاً با مجموعه هایی از تصاویر همپوشانی سروکار دارند به طور قابل توجهی افزایش دهد. . شناسایی آسیب روکشها در امتداد رودخانههای شهری مستلزم راندمان اجرایی بالایی است، که همچنین در امکان تعمیر و نگهداری و بهبود از قبل قبل از وقوع خرابی بیشتر بسیار ارزشمند است. تطبیق مبتنی بر SGM یکی از زمانبرترین مراحل در تولید ابر نقطه فتوگرامتری است و بنابراین بهبود کارایی این مرحله از اهمیت بالایی برخوردار است.
در این مقاله، برای کاهش هزینههای محاسباتی ابرهای نقطه زائد، از یک رویکرد تطبیق متراکم مبتنی بر فضای شی برای برآوردن نیاز به بازسازی سریع سهبعدی برای پوششها استفاده میشود. برخلاف نرمافزارهای فتوگرامتری، مانند Agisoft Metashape و Pix4Dmapper، ارتفاع هر شبکه در روکش برای محاسبه تطابق متراکم پیکسل به پیکسل در حالی که تاثیر نقاط شی سهبعدی مجاور را در نظر میگیرد و سطح جزئیات دقیق روکشها را در نظر میگیرد، استفاده میشود. متفاوت از بسیاری از کاربردهای بینایی کامپیوتری، مطالعه ما روی سطح پوشش بر روی ساخت سه بعدی (یعنی مقدار ارتفاع) سطح بالایی زمین متمرکز شده است. این رویکرد برای تولید جفتهای استریو تصویر عادی نیست، بلکه برای انجام تطبیق متراکم در فضای شی وکسل است. بر این اساس، نیازی به محاسبه هزینه تطبیق فضای تصویر نیست. در عوض، همه تصاویر را می توان برای نشان دادن هزینه تطبیق مستقیم بر روی هر وکسل استفاده کرد که برای برنامه های نقشه برداری مبتنی بر پهپاد مناسب تر است. یعنی بهینه سازی نیمه جهانی را می توان در فضای وکسل انجام داد و ابرهای نقطه متراکم مبتنی بر تصویر را می توان مستقیماً بدست آورد. بر خلاف اکثر تطابق تصاویر مبتنی بر SGM [36 ، 37]، ابرهای نقطه پراکنده به دست آمده از تنظیم بسته نرم افزاری را می توان برای ساده سازی روش تولید ابر نقطه مبتنی بر تصویر استفاده کرد. به طور خاص، با استفاده از دانش قبلی از اشیاء بازسازی شده، دامنه جستجوی نقاط مربوطه را می توان در فضای وکسل محدود کرد، که به بهبود دقت و کارایی بازسازی کمک می کند. در این راستا، مقادیر ارتفاع در اضلاع عمودی ضروری نیست. رویکرد مبتنی بر فضای شی فقط می تواند مقادیر ارتفاع را در سطح بالایی محاسبه کند و به کاهش هزینه محاسباتی ابرهای نقطه اضافی کمک می کند. یعنی رویکرد تطبیق متراکم مبتنی بر فضای شی مورد استفاده در این مقاله برای تشخیص دقیق، سریع و مقرون به صرفه آسیب پوشش مناسب است. منطقه پیشنهادی در حال رشد همراه با SGM عمدتاً شامل موارد زیر است: (الف) یک شبکه نامنظم مثلثی (TIN) در فضای سه بعدی برای مقداردهی اولیه سطح جسم سه بعدی ایجاد می شود. (ب) از درونیابی وزنی معکوس برای بدست آوردن مقادیر اولیه ارتفاع استفاده می شود. و (ج) یک استراتژی در حال رشد منطقه بررسی شده است تا به تدریج ابرهای نقطه متراکم پیکسل به پیکسل برای بازسازی سطح روکش با در نظر گرفتن دقت و کارایی ایجاد شود.
نوآوری روش ما این است که فرض می کنیم مجموعه نقاط سه بعدی پراکنده است oبjتنظیمپراکندهاز SfM مشتق شده است و سپس آن را با استفاده از علامت نشان می دهیم پobjمنایکس،Y،زسلول در مجموعه oبjتنظیمپراکندهدر من نقطه سه بعدی در موقعیت جسم ایکس،Y،زبا من∈1،…،ن. همانطور که در شکل 5 نشان داده شده است ، یک نقطه شی به دست آمده از مدل سه بعدی پراکنده مربوط به nتصاویر سنجش از دور پهپاد دو بعدی، که در آن nمی تواند ≥ 2 باشد. سپس نشان می دهیم پimgمن→jایکس،yموقعیت در jth پهپاد تصاویر سنجش از دور در موقعیت تصویر ایکس،y. در این مطالعه، نقاط متناظر در تصاویر سنجش از دور پهپاد بازپخششده از نقاط پراکنده سهبعدی، متناظر و دانههای برجسته در نظر گرفته میشوند، که از طریق منطقه در حال رشد در چهار محله نشاندادهشده در شکل 5 ب. سپس، ابرهای نقطه متراکم پیکسل به پیکسل به طور مکرر با استفاده از تابع هزینه و الگوریتم SGM با هندسه اپی قطبی شناخته شده، که در شکل 5 ج نشان داده شده است، تعیین می شوند.
به طور خاص، یک مجموعه oبjتنظیممتراکمابرهای نقطه متراکم در ابتدا با استفاده از مجموعه اختصاص داده می شود oبjتنظیمپراکنده. با فرض اینکه تمام نقاط سه بعدی پobjمنایکس،Y،زمن∈1،…،ندر oبjتنظیممتراکمدانه ها هستند و بر روی تصاویر مربوطه، نمایش داده می شوند پimgمن→jایکس،yموقعیت در اولین تصویر مربوطه بذر در نظر گرفته شده و با رشد منطقه در چهار محله گسترش یافته است ℝ4. به عنوان مثال، نقطه پرس و جو پایکسدر ثابت شده است تصویر1، و مطابقت ها در سایر تصاویر مربوطه با استفاده از الگوریتم SGM با هندسه اپی قطبی شناخته شده تعیین می شوند. بر اساس الگوریتم SGM [ 36 ، 38 ]، نقاط سه بعدی در جهت رشد منطقه تعیین و در مجموعه ذخیره می شوند. oبjتنظیممتراکم. ما این مراحل تطبیق متراکم را تکرار می کنیم تا جایی که نتوان نقطه سه بعدی را به مجموعه اضافه کرد oبjتنظیممتراکم. اگرچه الگوریتم SGM می تواند به طور مناسب ابرهای نقطه ای متراکم ایجاد کند، برخی مناطق محلی با بافت ضعیف احتمالاً به خوبی بازسازی نشده اند.
در این مطالعه، ما یک رویکرد جدید از وصله صحنه سه بعدی را برای ایجاد نقاط سه بعدی در این مناطق محلی معرفی می کنیم. یک شبکه نامنظم مثلثی (TIN) با استفاده از مجموعه ایجاد می شود oبjتنظیممتراکمابرهای نقطه ای متراکم پس از آن، مختصات نقاط سه بعدی درون TIN را می توان با استفاده از درون یابی وزنی فاصله معکوس محاسبه کرد که به صورت بیان می شود.
جایی که زمقدار ارتفاع یک نقطه سه بعدی ناشناخته است، مترتعداد نقاط سه بعدی اطراف نقطه سه بعدی ناشناخته است، زمنمقدار ارتفاع i امین نقطه سه بعدی اطراف است، wمنوزن مربوط به است زمن، و دمنفاصله بین نقطه سه بعدی ناشناخته و یکمین نقطه سه بعدی اطراف شناخته شده است. الگوریتم روش تطبیق متراکم پیشنهادی در زیر بیان شده است.
| الگوریتم 1: منطقه در حال رشد همراه با SGM |
| ورودی: نقاط پراکنده سه بعدی oبjتنظیمپراکنده، پارامترهای جهت گیری بیرونی EOپو تصاویر سنجش از راه دور پهپاد. |
| پارامترها: نقاط متراکم سه بعدی oبjتنظیممتراکم، چهار محله ℝ4، نقطه پرس و جو پایکس، تصاویر مرتبط پimgمن→jایکس،y، نابرابری د، مسیر حداقل هزینه Lrپایکس،دنقطه سه بعدی جدید پobjجدیدایکس،Y،زو نقاط سه بعدی ناشناخته oبjتنظیممتراکم،ناشناخته. |
| مقدار دهی اولیه کنید oبjتنظیممتراکم←oبjتنظیمپراکنده. |
| تکرار |
| برای هر نقطه سه بعدی پobjمنایکس،Y،زمن∈1،…،ندر مجموعه oبjتنظیممتراکم انجام دادن |
| اختصاص دهید پobjمنایکس،Y،زبه عنوان یک دانه |
| پروژه مجدد پobjمنایکس،Y،زبه سوی پimgمن→jایکس،y. |
| محاسبه هندسه اپی قطبی بر اساس EOپ. |
| برای k = 1 به ℝ4 انجام دادن |
| محاسبه Lrپایکس،دمربوط به پایکسکه در پimgمن→jایکس،yبا هندسه اپی قطبی شناخته شده |
| پایان برای |
| مختصات را محاسبه کنید پobjجدیدایکس،Y،زبا استفاده از SGM و مثلث هوایی. |
| به روز رسانی oبjتنظیممتراکمبا افزودن نقطه سه بعدی جدید. |
| پایان برای |
| تا زمانی که نیازی به افزودن نقطه سه بعدی نباشد. |
| پیدا کردن oبjتنظیممتراکم،ناشناختهدر مناطق محلی که به خوبی بازسازی نشده اند. |
| TIN را ایجاد کنید. |
| برای هر نقطه سه بعدی oبjتنظیممتراکم،ناشناخته انجام دادن |
| مختصات نقطه سه بعدی را با درون یابی وزنی معکوس فاصله محاسبه کنید. |
| به روز رسانی oبjتنظیممتراکمبا اضافه کردن نقطه سه بعدی |
| پایان برای |
3.2. تولید امضای آسیب
ابرهای نقطهای متراکم که از فتوگرامتری پهپاد به دست میآیند، میتوانند ساختار هندسی با جزئیات دقیقی از روکش ایجاد کنند و به عنوان جایگزینی برای روش بازرسی بصری در نظر گرفته شوند. دستهبندی آسیبهای پوشش عمدتاً فروریختگی و ترک است. در زمین صاف، محل فروپاشی معمولاً با یک ناحیه ناهموار در زیر ارتفاع سطح زمین با یک مرز نامنظم مشخص می شود و یک ترک معمولاً به عنوان یک جسم خطی نشان داده می شود.
بر خلاف زمین مسطح، روکش ها در امتداد رودخانه های شهری به صورت شیب دار ساخته می شوند. بنابراین، ما تلاش میکنیم تا ابرهای نقطهای متراکم را به یک تصویر با شدت شیب برای تشخیص آسیب در این مطالعه بر اساس این فرض که پوشش با زاویه شیب ثابت ساخته شده است، تبدیل کنیم. در حالت ایده آل، مقادیر تصویر شدت شیب واقع در مناطق پوشش تقریباً در این مورد برابر است. سپس یک تصویر شدت شیب از طریق محاسبه شیب تولید می شود که برای شناسایی شیب در هر سلول از سطح شطرنجی ابرهای نقطه متراکم با استفاده از ماژول شیب نرم افزار ArcGIS انجام می شود. بخشی از سطح پوشش ممکن است با پوشش گیاهی پوشیده شده باشد (مثلاً چمن)، که به عنوان نقاط سه بعدی مقادیر نوسان ارتفاع در ابرهای نقطه متراکم ظاهر می شود. فتوگرامتری پهپاد به وضوح دارای محدودیت هایی در بررسی سطح پوشش در حضور پوشش گیاهی است، بنابراین احتمالاً بر دقت تشخیص آسیب پوشش تأثیر می گذارد. برای از بین بردن تأثیر پوشش گیاهی در تصویر شدت شیب، حذف پوشش گیاهی ابتدا با یک شاخص برگ سبز تبدیل گاما انجام می شود [39 ]. متعاقباً، تشخیص آسیب با استفاده از یک عملگر پیشنهادی به نام SMGO انجام میشود که برای استخراج مناطق غیرعادی با اندازههای مختلف در تصویر شدت شیب طراحی شده است. به طور خاص، عملیات گرادیان همه جهته (افقی، عمودی، و مورب) با استفاده از یک عملگر خود تطبیقی با وزن های کاهش یافته انجام می شود. از این رو، یک عملگر گرادیان متغیر در هر سلول برای تعیین اینکه آیا متعلق به منطقه آسیب دیده است یا غیر آسیب دیده استفاده می شود. یک معماری چند مقیاسی در این اپراتور برای تشخیص مناطق آسیب دیده با اندازه های مختلف معرفی شده است.
هدف اصلی این مطالعه شناسایی مناطق آسیب دیده پوشش است. بنابراین، تشخیص پوشش خودکار یک کار ضروری در تعیین ابرهای نقطه متراکم است. در این مطالعه، منطقه مورد نظر (AOI) یا منطقه تحت پوشش پوشش را از تصویر شدت شیب استخراج میکنیم. بر اساس این فرض که AOIهای پوشش دارای زوایای شیب تقریباً مساوی هستند، مطالعات قبلی [ 39 ] با استفاده از ادغام SLIC و سوپرپیکسل به طور مشترک برای استخراج مناطق پوشش از نقشه شدت استفاده می شوند، همانطور که در شکل 6 نشان داده شده است.. ابتدا، تصویر شدت شیب به مجموعه ای از سوپرپیکسل ها از نظر مقادیر شیب مشابه تقسیم می شود. دوم، سوپرپیکسل ها در یک سری از مناطق بر اساس مقادیر شیب تقریباً مساوی ادغام می شوند. سوم، AOI پوشش با استفاده از مقدار شیب متوسط تصویر شدت شیب تعیین می شود. در زیر مراحل اصلی استخراج منطقه روکش آورده شده است.
مرحله 1: ابرهای نقطه متراکم حاصل از فتوگرامتری پهپاد ارزان قیمت با استفاده از اندازه شبکه شطرنجی می شوند. Δد×Δد، جایی که Δدوضوح تصاویر سنجش از راه دور پهپاد است.
مرحله 2: شیب تصویر شطرنجی شده و شدت تصویر محاسبه می شود منشیبایکس،yشیب با استفاده از نرم افزار ArcGIS تولید می شود.
مرحله 3: تصویر شدت منشیبایکس،yبا الگوریتم SLIC به سوپرپیکسل ها تقسیم می شود و سوپرپیکسل ها بر اساس مقادیر شیب تقریباً مساوی در یک سری از مناطق ادغام می شوند.
مرحله 4: AOI پوشش با استفاده از مقدار شیب منطقه در [ سلoپه_vآلتوه-10 درجه، سلoپه_vآلتوه+10 درجه]، که در آن سلoپه_vآلتوهشیب متوسط چند نمونه در این مطالعه است.
سپس، تصویر ویژگی منخسارتایکس،yآسیب از شدت ایجاد می شود منشیبایکس،yاز طریق اپراتور پیشنهادی SMGO. از نظر ریاضی، گرادیان ها grآدایکس،yدر هر سلول ایکس،yبه عنوان محاسبه می شوند
جایی که ∂منشیب∂ایکس، ∂منشیب∂y، و ∂منشیب∂دمنآgشیب ها به ترتیب در جهت افقی، عمودی و مورب هستند. معماری چند مقیاسی در SMGO در شکل 7 نشان داده شده است و دو مقیاس نشان داده شده است. نواحی مجاور اطراف سلول پ∈منشیبایکس،yبر اساس معادله زیر تعریف می شوند:
جایی که rشعاع ناحیه اطراف سلول است پ، INT.عملیات عدد صحیح است و σضریب مقیاس اولیه SMGO است که در این مطالعه روی 1.6 تنظیم شده است. ک∈1،2،3،…سس≥2مجموعه ای از عوامل متعدد است که مقادیر کلیدی در تعیین محدوده ناحیه اطراف سلول هستند. پ. محاسبه گرادیان در هر مقیاس بر اساس عملگرهای فرعی انجام می شود که در شکل 7 c-f (مقیاس 1) و شکل 7 h-k (مقیاس 2) نشان داده شده است. گرادیان هر عامل فرعی به صورت ریاضی با استفاده از عملیات کانولوشنی زیر محاسبه می شود:
جایی که جی.نشان دهنده ماتریس وزن ها در عملگر گرادیان است و با فاصله معکوس غیر خطی به صورت تعریف می شود.
جایی که Δایکس،Δyجابجایی بین سلول مجاور و مرکز است ایکس،y. سپس می توان ماتریس های عملگرهای فرعی را تعیین کرد. به عنوان مثال، شکل 7 c-f با ماتریس ها نشان داده شده است -1.91-2.32-1.910001.912.321.91، -1.9101.91-2.3202.32-1.9101.91، 00-1.29000-1.91000-1.290001.290001.910001.2900، و 00-1.2900000-1.9101.290001.2901.91000001.2900، به ترتیب. مشابه خروجی شبکه عصبی، یک تابع فعال سازی حداکثر برای تعیین گرادیان سلول استفاده می شود. پبا استفاده از حداکثر مقدار تمام عملگرهای فرعی. بیان ریاضی تابع فعال سازی حداکثر است
قابل ذکر است که تعداد مقیاس ها ثابت نیست بلکه تطبیقی است. اگر گرادیان جیکمتر از مقدار داده شده است تیشیب، سپس مقدار کافزایش نمی یابد. در این مطالعه، حداقل دو مقیاس SMGO برای ایجاد معماری چند مقیاسی مورد نیاز است. الگوریتم SMGO پیشنهادی به عنوان الگوریتم 2 ارائه شده است.
| الگوریتم 2: محاسبه گرادیان با استفاده از SMGO |
| ورودی: شدت تصویر منشیبایکس،yبا عرض W و ارتفاع H، مقدار ثابت σ، و آستانه گرادیان تیشیب. |
| پارامترها: چند عاملی کو شعاع rاز ناحیه اطراف سلول پ. |
| برای col = 1 تا W انجام دهید |
| برای ردیف = 1 تا H انجام دهید |
| تکرار |
| r←INTک⋅σ+0.5 |
| اپراتورهای فرعی ⇐8πک2σ2ه-Δایکس2+Δy22ک2σ2 |
| گرادیان ها را محاسبه کنید grآدایکس،yبا استفاده از عملگرهای فرعی |
| شیب جیواقع در ایکس،y ←حداکثر∂منشیب∂ایکس،∂منشیب∂y،∂منشیب∂دمنآgL،∂منشیب∂دمنآgآر. |
| ک←ک+1. |
| تا گرادیان جی<تیشیبو ک>2. |
| پایان برای |
| پایان برای |
پس از تولید امضای آسیب، مناطق آسیب دیده ℝخسارتتوسط یک عملیات باینری بر اساس یک شرط معین تعیین می شوند که می توان آن را به صورت تعریف کرد
جایی که مترهآn⋅و ستید⋅محاسبه میانگین و انحراف معیار در نقشه امضای آسیب را نشان می دهد. اگر grآدℝایکس،yاین شرایط را برآورده می کند، در نظر گرفته می شود که در منطقه آسیب قرار دارد. سپس با دو معیار، فرو ریختن و ترک از مناطق آسیب دیده جدا می شود، یعنی اگر آrهآℝخسارت>0.25متر2و پهrمنمترهتیهrℝخسارت/آrهآℝخسارت<1.5، سپس منطقه آسیب دیده ℝخسارتبه عنوان یک فروپاشی تعریف می شود. در غیر این صورت، ℝخسارتترک در نظر گرفته می شود، که در آن آrهآ⋅و پهrمنمترهتیهr⋅بیانگر محاسبه مساحت و محیطی است که می توان با استفاده از نرم افزار ArcGIS انجام داد.
4. نتایج
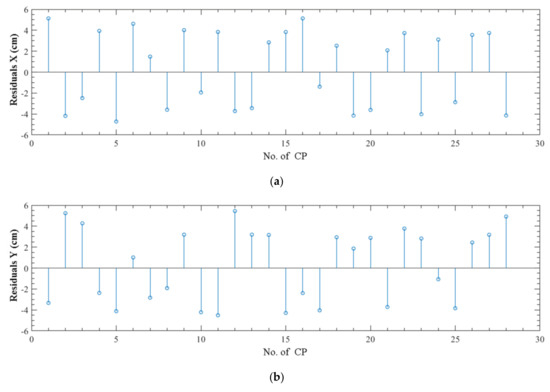
در آزمایشها، ابرهای نقطهای متراکم با استفاده از روش پیشنهادی تولید میشوند و از طریق برنامهنویسی C++ و یک کتابخانه منبع باز (یعنی OpenCV) پیادهسازی میشوند. نرم افزار ما عمدتاً شامل تصحیح اعوجاج، تطبیق پراکنده، تطبیق متراکم، جهت گیری مطلق، دوخت تصویر، تولید DSM و تولید ارتوفوتو است. ماژول تطبیق پراکنده شامل دو روش است، یعنی مطابقت با تمام تصاویر بدون هیچ گونه اطلاعات پشتیبانی و تطبیق مسیر با پشتیبانی از GPS/IMU، و ماژول تطبیق متراکم بر اساس نتایج تطبیق پراکنده اجرا می شود. عملکرد نقشه برداری مبتنی بر پهپاد ارزان قیمت (یعنی DJI Mavic Air) در بازسازی دقیق سطح پوشش برای تشخیص آسیب حیاتی است. قسمت 1 را به عنوان مثال در نظر بگیرید، توزیع GCPها و CPها (به عنوان مثال،شکل 8 . خطای باقیمانده و ریشه میانگین مربعات خطا (RMSE) به ترتیب بر اساس 13 و 15 CP برای قسمت های 1 و 2 محاسبه شد و بر روی RTK GPS اندازه گیری شد. نقاط سه بعدی مربوط به آنها از ابرهای نقطه متراکم مشخص شد. مقادیر X، Y و Y RMSE با استفاده از رابطه (8) محاسبه شده و آمار خطای CPها در شکل 9 و جدول 1 خلاصه شده است. علاوه بر این، خطاهای طرح مجدد آرماسEimgنقاط چک (CPs) با استفاده از رابطه (9) محاسبه شده و آمار خطا در جدول 2 خلاصه شده است. شکل 10 (قسمت 1) ابرهای نقطه ای متراکم پیکسل به پیکسل را نشان می دهد که با رنگ هایی از تصاویر سنجش از دور پهپاد ساخته شده اند. روکش شامل 1.96×107نقاط، که مربوط به تراکم تقریباً 963 نقطه بر متر مربع و اندازه شبکه 3.2 × 3.2 سانتی متر است. استفاده از روش تطبیق متراکم پیشنهادی، جزئیات ظریف سطح روکش را بازسازی می کند. نتایج نشان میدهد که مقادیر X و Y RMSE بهدستآمده از روش تطبیق متراکم پیشنهادی کمتر از 4 سانتیمتر بوده که یک خطای افقی نسبتاً کوچک است. علاوه بر این، مقدار RMSE عمودی یا مقدار Z RMSE کمتر از 6 سانتیمتر بود و خطاهای طرح مجدد کمتر از یک پیکسل است. بنابراین، این مقادیر RMSE برای بازسازی با دقت بالا سطح روکش نسبتاً رضایت بخش به نظر می رسید. دقت برای تشخیص علائم آسیب در سطح روکشها در امتداد رودخانههای شهری کافی در نظر گرفته شد.
جایی که ایکسمنو سیjبه ترتیب یک نقطه سه بعدی و یک دوربین را نشان دهید. پایکسمن،سیjپیش بینی نقطه است ایکسمنروی دوربین سیj; ایکسمنjنقطه تصویر مشاهده شده است. ·نشان دهنده عملکرد L2-norm است. ρمنjیک تابع نشانگر با ρمنj=1اگر نقطه ایکسمندر دوربین قابل مشاهده است سیj; در غیر این صورت، ρمنj=0.
ما همچنین عملکرد بازسازی سطح را با نرم افزار تجاری مانند Agisoft Metashape Professional 1.5.3 ( www.agisoft.com ) و Pix4Dmapper 4.4 ( www.pix4d.com ) مقایسه کردیم که نرم افزارهای فتوگرامتری پرکاربرد برای بازسازی سطوح سه بعدی هستند. و نظارت بر روکش [ 19 ، 23]. به منظور متعادل کردن دقت و کارایی، دقت متوسط برای انجام تطابق پراکنده و متراکم در Agisoft Metashape Professional 1.5.3 تنظیم شده است و تنظیمات پیشفرض در Pix4Dmapper 4.4 استفاده میشود. برای ارزیابی اثرات معماری چند مقیاسی در SMGO پیشنهادی، عملگر گرادیان غیر چند مقیاسی (NMGO) با روش ما مقایسه میشود. تصاویر شدت گرادیان با مقادیر نرمال شده از 0 تا 1 نشان داده شده در شکل 11 h,i به ترتیب توسط عملگرهای گرادیان غیرمقیاسی و چند مقیاسی تولید می شوند.
شاخصهای Precision ، Recall و F 1_ امتیاز برای ارزیابی روش پیشنهادی در آزمایشهای ما به شرح زیر استفاده میشوند:
جایی که تیپتعداد مناطق آسیب دیده است که به درستی شناسایی شده اند، افپتعداد مناطق آسیبی است که به اشتباه شناسایی شده اند و افنتعداد مناطق آسیب دیده ناشناخته است. جدول 3 نتایج آماری Precision ، Recall و F 1_ را برای تشخیص شکست و ترک فهرست می کند. علاوه بر این، بازرسی بصری میدانی، تشخیص آسیب مبتنی بر NMGO و روش پیشنهادی در جدول 3 مقایسه شده است.. لازم به ذکر است که ارزش واقعی ریزش و ترک از طریق بازرسی دستی بدست می آید. به طور خاص، مناطق آزمایشی به شبکههایی روی نقشه تقسیم میشوند و سپس متخصصان با جزئیات بررسی میکنند که آیا در هر شبکه فرو ریختن یا ترک وجود دارد یا خیر. در صورت وجود، مختصات با استفاده از ابزار اندازه گیری GPS علامت گذاری می شوند. برای مقایسه منصفانه، بازرسی بصری میدانی بر اساس فرآیند رایج مورد استفاده توسط سه نقشه بردار مختلف انجام می شود و مقادیر متوسط تیپ، افپ، و افنمحاسبه می شوند.
5. بحث
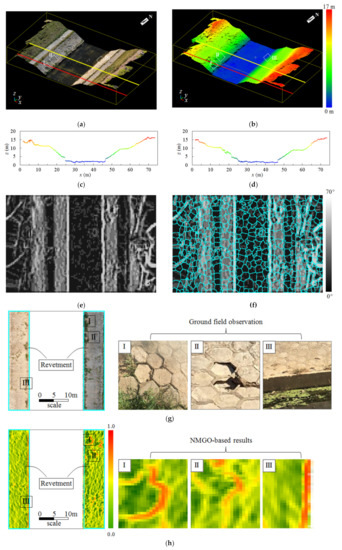
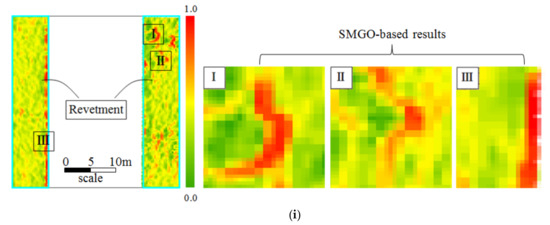
در این مطالعه، روش تطبیق متراکم پیشنهادی در بازسازی سطح بهتر از Pix4Dmapper و Agisoft Metashape از نظر مقادیر RMSE نشان داده شده در جدول 1 و جدول 2 عمل می کند. قابل ذکر است که مصرف زمان روش پیشنهادی تنها 87 درصد از Pix4Dmapper و Agisoft Metashape در یک محیط عملیاتی مشابه است. این نتایج را می توان به تطابق متراکم به دست آمده توسط رویکرد مبتنی بر فضای شی نسبت داد، که فقط مقادیر ارتفاع را در سطح بالایی زمین محاسبه می کند و هزینه محاسباتی ابرهای نقطه اضافی را کاهش می دهد. برای ارائه یک توصیف دقیق، همانطور که در شکل 10 نشان داده شده است ، زیر ناحیه استخراج شده جزئیات ساختار هندسی را نشان می دهد و شکل 11a,b نتایج مربوط به زیر ناحیه را ارائه می دهد. دو نمونه از مقطع ابرهای نقطه ای متراکم که از نقشه برداری پهپاد به دست می آیند در شکل 11 c,d به ترتیب با (با خط قرمز مشخص شده) و بدون آسیب (با خط زرد مشخص شده) نشان داده شده است. متعاقباً، شکل 11 e,f تصویر شدت شیب تولید شده از طریق محاسبه شیب و سوپرپیکسلهای تقسیمبندی شده با الگوریتم مبتنی بر SLIC را نشان میدهد [ 39 ]. شکل 11 g، نواحی پوششی را نشان میدهد که از طریق ادغام سوپرپیکسل بر اساس شیبها و مجاورتهای مشابه به دست آمدهاند، و سه ناحیه بزرگشده آسیبدیده I، II و III از مشاهدات میدانی زمین (یعنی عکسهای زمین RGB) نیز نشان داده شدهاند.
از نظر ارزیابی بصری، نمایه در شکل 11 d ساختار هندسی مربوط به منطقه I است. در شکل 11h،i، می توان مشاهده کرد که ناحیه شناسایی شده توسط الگوریتم SMGO با ساختار هندسی سازگارتر از آن چیزی است که توسط NMGO شناسایی شده است. NMGO در شناسایی تمام مناطق آسیب دیده مشکل دارد و تداوم فضایی ترک ها را نادیده می گیرد یا حتی می تواند باعث ایجاد لبه ها در تشخیص بیش از حد شود. در مقایسه، SMGO پیشنهادی میتواند مناطق آسیبدیده را در محدودههای دقیق استخراج کند و با برجسته کردن شکاف بین مناطق آسیبدیده و آسیبدیده، دقت تشخیص آسیب پوشش را بهبود بخشد. بنابراین، SMGO پیشنهادی امکان شناسایی فروپاشی و ترک با افت ارتفاع نسبت به مناطق اطراف را فراهم میکند. این یافته به تشخیص آسیب پوشش با استفاده از SMGO پیشنهادی نسبت داده میشود، که میتواند به استخراج ویژگی در تمام جهتها با اپراتور چند مقیاسی در افقی، عمودی، دست یابد. و جهت های مورب به طور قابل توجهی، مناطق نوار با افت عمودی (به عنوان مثال، منطقه III نشان داده شده درشکل 11 h) نزدیک به رودخانه نیز شناسایی شده است اما در این مطالعه مناطق آسیب دیده در نظر گرفته نشده است. علاوه بر این، روش پیشنهادی عملکرد بهتری نسبت به دو روش دیگر از نظر دقت ، Recall و امتیاز F 1_ به ویژه در تشخیص ترک دارد. برای بازرسی بصری میدانی، ترکهای نامحسوس ممکن است به راحتی نادیده گرفته شوند و در این مورد به راحتی تشخیص دستی تحت تأثیر قرار میگیرد، یعنی آسیب ترک اغلب در انواع دیگر آسیبها (مثلاً فروپاشی) وجود دارد. همانطور که در بالا ذکر شد، روش مبتنی بر NMGO ویژگی آسیب را نادیده می گیرد و عملکرد ضعیفی دارد.
6. نتیجه گیری
هدف این مطالعه دستیابی به شناسایی آسیب پوشش در امتداد رودخانههای شهری از طریق ابرهای نقطهای متراکم حاصل از فتوگرامتری پهپاد کمهزینه است. در این مطالعه، دو بهبود رویکرد پیشنهادی تأیید میکند که روش ما میتواند به عنوان یک جایگزین مؤثر برای بازرسی بصری میدانی برای شناسایی آسیبهای روکش (با حفاظت از شیب) در امتداد رودخانههای شهری استفاده شود. (1) رشد منطقه همراه با SGM برای تولید ابرهای نقطهای متراکم پیکسل به پیکسل از تصاویر سنجش از راه دور پهپاد و بازسازی جزئیات دقیق سطح پوشش با دقت بالا پیشنهاد شده است. این بازسازی از نظر خطای افقی <4 سانتی متر و خطای عمودی <6 سانتی متر نسبت به GCP ها رضایت بخش در نظر گرفته می شود. (2) بر اساس ارزیابی بصری درجا و تجزیه و تحلیل کمی (به عنوان مثال، حداقل 90٪ از دقتمقادیر امتیاز ، Recall و F 1_ )، دقت تشخیص آسیب پوشش پس از مقایسه نتایج بازرسی بصری میدانی و روش مبتنی بر NMGO تأیید میشود. نکته قابل توجه، نقشه برداری مبتنی بر پهپاد می تواند امکان جدیدی را در اندازه گیری، نظارت و درک کامل آسیب پوشش با عملیات کم هزینه ارائه دهد. نقشهبرداری مبتنی بر پهپاد، فناوریای را ارائه میکند که پتانسیل تغییر نحوه تشخیص آسیب پوشش را دارد و بررسی میکند. علاوه بر این، می تواند به دولت و مقامات محلی کمک کند تا برنامه های مدیریت پوشش را توسعه دهند و شواهدی برای نگهداری یا بهبود ارائه دهند.
این مطالعه برای شناسایی نشانه های آسیب در روکش های طراحی شده با محافظ شیب مناسب است. استفاده از روش پیشنهادی در روکشهای با شیبهای تند هنوز به بررسی بیشتر نیاز دارد، زیرا جهت گیری نادری یک دوربین برای فتوگرامتری در دستیابی به بازسازی سطحی با دقت بالا روکشهای تند مشکل دارد. در مطالعات آتی، ما رویکرد پیشنهادی را با استفاده از فتوگرامتری مایل و یادگیری عمیق برای دستیابی به تشخیص آسیب رضایت بخش روکش های شیب دار بهینه خواهیم کرد.








بدون دیدگاه