

خلاصه
کلید واژه ها:
موقعیت یابی داخلی ؛ انگشت نگاری وای فای ؛ AP مجازی ؛ دایره آپولونیوس
1. معرفی
2. کارهای مرتبط
2.1. روش های مبتنی بر اثر انگشت
-
روش های یادگیری ماشینی در مرحله آفلاین، مدلی برای مرتبط کردن بردارهای سیگنال با مکانهای مکانی آموزش داده میشود. در طول مرحله آنلاین، این مدل برای پیشبینی مکان یک هدف متحرک با توجه به بردار سیگنال جمعآوریشده در مکان فعلی از APهای اطراف استفاده میشود. به عنوان مثال، وانگ و همکاران. [ 10 ] یک سیستم اثرانگشت داخلی مبتنی بر یادگیری عمیق را برای موقعیت یابی داخلی به نام DeepFi پیشنهاد کرد که از یک الگوریتم یادگیری حریصانه برای آموزش وزنه ها لایه به لایه برای کاهش پیچیدگی استفاده می کند. دای و همکاران [ 34] یک روش MLNN را پیشنهاد کرد که تبدیل RSSI، حذف نویز داده های خام و مکان یابی گره ناشناخته را در یک معماری عمیق ادغام می کند، علاوه بر این، از استفاده از نقشه RSSI در مرحله آنلاین اجتناب می کند. برای کاهش هزینه و زمان محاسباتی مورد نیاز، از ماشین یادگیری افراطی (ELM) در کار خطاب و همکاران استفاده شده است. [ 35 ]. همچنین از رمزگذار خودکار به جای تولید وزن تصادفی استفاده می کند که منجر به استخراج ویژگی های متمایز و بهبود عملکرد محلی سازی می شود. در میان این روشها، بیشتر آنها از یادگیری ماشینی برای یافتن الگوی درونی دادههای MN برای مطابقت با دادههای RP استفاده میکنند. با این حال، محدودیتهای بیرونی، مانند نشانهها، هنگام مواجهه با تضعیف ناشی از موانع، هنوز غیرقابل جایگزین هستند.
-
روشهای بدون یادگیری ماشینی روش نماینده WKNN [ 44 ] است. از معیارهای شباهت مختلف برای اندازهگیری فاصله بین MNها و RPهای انتخاب شده استفاده میکند و سپس وزن بالاتری را به RP نزدیکتر اختصاص میدهد [ 40 ، 45 ، 46 ، 47 ، 49 ، 50 ، 51 ، 52 ، 53 ، 54 ]. فنگ و همکاران [ 45] تصور می کنند که مشکل محلی سازی را می توان به عنوان یک مسئله پراکنده مدل کرد. بنابراین، آنها از تئوری سنجش فشاری برای بازیابی سیگنال های پراکنده از تعداد کمی از اندازه گیری های نویز استفاده می کنند. این می تواند پراکندگی جغرافیایی RP های انتخاب شده ناشی از ناسازگاری بین فضای سیگنال و فضای فیزیکی را برطرف کند. او و همکاران [ 47 ] پارتیشن بندی منطقه تحت پوشش هر AP را پیشنهاد کرد. سپس، از طریق بهینه سازی محدب، کاربر بر اساس خوشه و محل اتصال بخش هایی که در آن قرار دارد، بومی سازی می شود. جدای از اینها، محلی سازی در سطح اتاق نیز توجه زیادی را به خود جلب می کند. به عنوان مثال، جیانگ و همکاران. [ 49] از یک الگوریتم خوشهبندی مبتنی بر منطقه برای شناسایی یک نقطه مهم اشغال داخل اتاق استفاده کرد. سپس، یک الگوریتم خوشهبندی مبتنی بر حرکت برای شناسایی همبستگی بین منطقهای استفاده میشود و در نتیجه اتاقهای مختلف را متمایز میکند.
2.2. روشهای مبتنی بر محدوده
-
رویکردهای مبتنی بر فاصله فواصل بین زیرساخت های مکان شناخته شده (به عنوان مثال، AP) و MN را محاسبه می کند. سپس از روش های هندسی مانند مثلث بندی برای تخمین مکان دقیق MN ها استفاده می شود. با این حال، تضعیف سیگنال اغلب اتفاق می افتد باعث عدم دقت محاسبه مکان می شود. برای پرداختن به این موضوع، روش ارائه شده توسط داگ و همکاران. [ 23 ] از الگوریتم حداقل مربعات برای بهبود قابلیت اطمینان اندازه گیری های RSSI استفاده کرد. به طور مشابه، الگوریتم حداقل مربعات نیز در کار Coluccia و همکاران استفاده شده است. [ 27 ] برای دستیابی به دقت موقعیت یابی بالاتر. به غیر از رویکردهای حداقل مربعات، بسیاری از روشهای دیگر نیز برای مقابله با موضوع تضعیف سیگنال پیشنهاد شدهاند. به عنوان مثال، یونگ و همکاران. [ 24] از فیلترهای ذرات برای استنتاج مکان احتمالی MN و مسیر انتشار سیگنال احتمالی استفاده کرد. سپس از مسیر استنباط شده برای کاهش خطای ناشی از فاصله NLOS (Non-Line-of-Sight) استفاده می شود. چوانگ و همکاران [ 25 ] الگوریتم بهینهسازی ازدحام ذرات (PSO) را برای بهبود دقت محلیسازی و رویکرد DV-distance برای افزایش بیشتر نسبتهای موفقیت محلیسازی اتخاذ کرد. چان و همکاران [ 26] یک روش هندسی برای مکان یابی MN پیشنهاد کرد که تنها به چند AP نیاز دارد. بسیاری از رویکردهای مبتنی بر فاصله از مدل سایه گذاری Log-Normal برای تخمین فاصله بین AP و اهداف متحرک استفاده می کنند. با این حال، تضعیف یک پارامتر حیاتی است که به سختی به دست می آید. در روش های فوق، معمولاً این پارامتر نادیده گرفته می شود که باعث کاهش دقت رویکرد محدوده می شود.
-
روش های مبتنی بر منطقه در این روشها، افراد از یک رابطه فاصله مبهم مانند دور یا نزدیک به AP خاص استفاده میکنند که توسط RSSI محاسبه میشود تا ناحیه ناهموار MN را تعیین کند. سپس مرکز ناحیه تعیین می شود که به عنوان تخمین مکان MN در نظر گرفته می شود. با این حال، شکل منطقه متفاوت است. به عنوان مثال، او و همکاران. [ 32 ] از تغییر RSSI از MNهای متحرک برای تعیین ناحیه مثلث ساخته شده توسط APها استفاده کرد. بنابراین MN در این ناحیه مثلث قرار دارد. شو و همکاران [ 33 ] یک الگوریتم شبکه اسکن بهبود یافته برای تعیین مکان های تخمین زده شده در یک ناحیه دایره ای پیشنهاد کرد. ناحیه دایره با پوشش سیگنال های AP ساخته می شود. لیو و همکاران [ 28] با استفاده از تفاوتهای RSSI دریافتشده از APهای مجزا برای ساختن یک ناحیه حلقهای که هدف متحرک احتمالاً در آن قرار دارد، پیشنهاد شد. الباکلی و همکاران [ 30 ] از نمودار Voronoi از APها برای تخمین مساحت احتمالی MNها استفاده کرد. رویکردهای مبتنی بر ناحیه از قدرت سیگنال برای تعیین یک ناحیه ناهموار استفاده می کنند، که از محاسبه فاصله فیزیکی با قدرت سیگنال قوی تر است. این می تواند به طور موثر تأثیر تضعیف سیگنال را کاهش دهد، اما فقط می تواند دقت موقعیت یابی سطح منطقه را فراهم کند، که نمی تواند نیاز بسیاری از برنامه های کاربردی خدمات مبتنی بر مکان (LBS) را برآورده کند.
2.3. روشهای مبتنی بر AP مجازی
3. حل کننده مکان مبتنی بر نسبت قدرت سیگنال
3.1. نسبت قدرت سیگنال
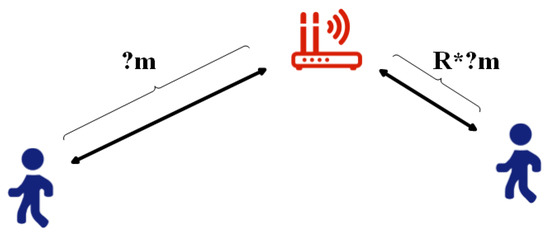
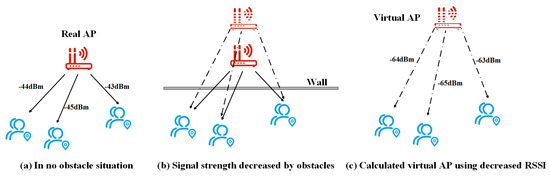
جایی که آراساسمنک(دکمن)قدرت سیگنال دریافتی از مکانی است که دور از آن است آپکدر یک فاصله دکمن. آراساسمنک(دک0)قدرت سیگنال دریافتی از مکانی است که دور از آن است آپکدر یک فاصله دک0. ηتوان از دست دادن مسیر است که به طور کلی با توجه به پیچیدگی صحنه از 1.6 تا 3.0 متغیر است. ضریب تضعیف مانع (OAF) نشان دهنده تضعیف سیگنال ناشی از موانع است. به طور معمول، ما تنظیم می کنیم دک0تا 1 متر سپس، دکمنمی توان با معادله ( 2 ) محاسبه کرد:
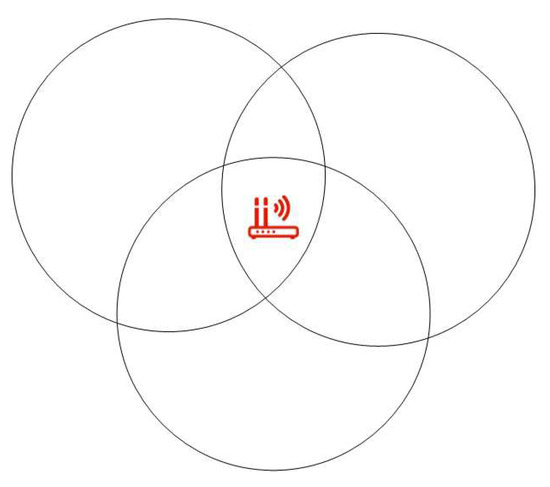
3.2. دایره آپولونیوس
جایی که (ایکسمن،yمن)و (ایکسj،yj)مختصات 2 بعدی محل i و j هستند و به ترتیب (ایکسک،yک)مختصات است آپک. همانطور که در شکل 1 نشان داده شده است ، روش پیشنهادی فقط نسبت فاصله را محاسبه می کند و فاصله مطلق بین نقطه مرجع و AP ناشناخته باقی می ماند. سپس، مکان مجازی AP ها را می توان با معادله ( 7 ) محاسبه کرد، که می تواند به صورت معادله ( 8 ) بازنویسی شود :
سپس، ما تنظیم می کنیم 2ایکسjآر2–2ایکسمن1–آر2به عنوان D2yjآر2–2yمن1–آر2به عنوان E ، و ایکسمن2+yمن2–ایکسj2آر2–yj2آر21–آر2به عنوان F. معادله به صورت معادله ( 9 ) بازنویسی می شود:
3.3. AP مجازی
4. روش پیشنهادی
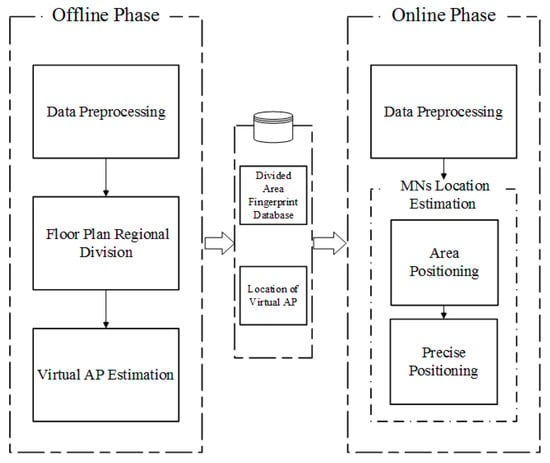
4.1. پیش پردازش داده ها
جایی که آراساسمنمن1کحداکثر مقدار RSSI در محل i است کتیساعتAP، و آراساسمنمن2کو آراساسمنمن3کدومین و سومین مقدار حداکثر RSSI در محل i هستندکتیساعتAP به ترتیب.
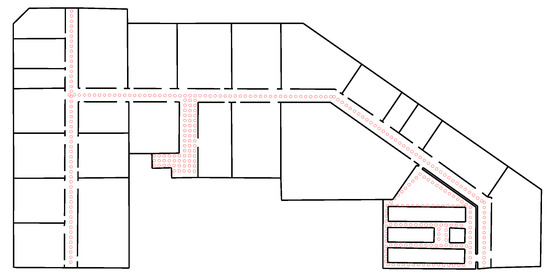
4.2. بخش منطقه
4.3. تخمین AP مجازی
جایی که (ایکسمن،yمن)مرکز دایره است که با معادله ( 9 ) محاسبه می شود.rمنشعاع دایره است و wمن¯وزن هر دایره است. به دلیل خطای قدرت سیگنال اندازه گیری شده، وزن کمتری را به RSSI که مسافت زیادی را منتشر کرده است اختصاص می دهیم. سپس، wمن¯می توان با معادلات ( 13 ) و ( 14 ) محاسبه کرد:
جایی که آرمنبا معادله ( 4 ) محاسبه می شود.
4.4. تخمین موقعیت مکانی نود موبایل
جایی که آراساسمنکRSSI است که MN از آن دریافت می کند کتیساعتAP، و آراساسمنمنکسیگنال دریافتی از کتیساعتAP در محل مرجع i . سپس، آراساسمنک(دک0)با معادله ( 16 ) محاسبه می شود:
جایی که دک0معمولاً 1 متر تنظیم می شود و دکمنتوسط مکان مجازی AP ها و RP ها محاسبه می شود. سپس، معادله ( 3 ) را می توان به صورت معادله ( 17 ) بازنویسی کرد :
جایی که آراساسمنمتر(دمترتو)و آراساسمنک(دکتو)هستند مترتیساعتو کتیساعتسیگنال های AP به ترتیب از MN دریافت می شوند. سپس، میتوانیم از همان روشی که در فاز تخمین AP مجازی استفاده شده است برای تخمین مکان دقیق MN استفاده کنیم.
5. ارزیابی
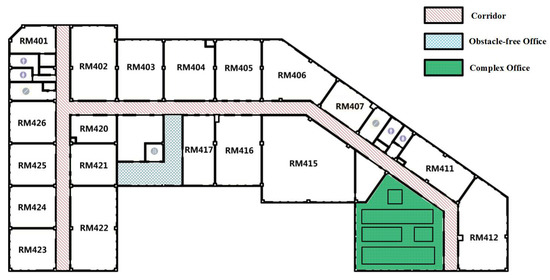
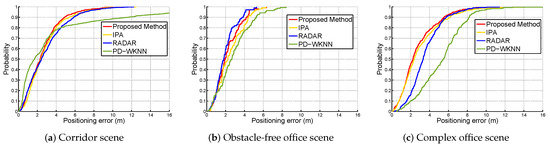
5.1. تاثیر صحنه های تست بر دقت موقعیت یابی
5.2. تاثیر پارامترهای محیطی بر دقت موقعیت یابی
6. نتیجه گیری
منابع
- چن، آر. Chen, L. موقعیت یابی داخلی با تلفن های هوشمند: آخرین روزها و چالش ها. Acta Geod. کارتوگر. گناه 2017 ، 46 ، 1316–1326. [ Google Scholar ]
- شانگ، جی. هو، ایکس. چنگ، دبلیو. Fan, H. GridiLoc: یک فیلتر شبکه عقبگرد برای ترکیب مدل شبکه با PDR با استفاده از حسگرهای تلفن هوشمند. Sensors 2016 , 16 , 2137. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژوانگ، ی. لان، اچ. لی، ی. ادغام El-Sheimy، N. PDR/INS/WiFi بر اساس دستگاه های دستی برای ناوبری عابر پیاده در داخل ساختمان. Micromachines 2015 ، 6 ، 793-812. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لی، ایکس. وانگ، جی. Liu, C. یک الگوریتم یکپارچه سازی بلوتوث/PDR برای یک سیستم موقعیت یابی داخلی. Sensors 2015 , 15 , 24862–24885. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ایجاز، ف. یانگ، هنگ کنگ؛ احمد، ع. Lee, C. موقعیت یابی داخلی: بررسی سیستم های موقعیت یابی اولتراسونیک داخلی. در مجموعه مقالات پانزدهمین کنفرانس بین المللی 2013 در زمینه فناوری ارتباطات پیشرفته (ICACT)، پارک فونیکس، پیونگ چانگ، کره، 27 تا 30 ژانویه 2013. صص 1146–1150. [ Google Scholar ]
- پریانتا، NB; چاکرابورتی، ا. بالاکریشنان، اچ. سیستم پشتیبانی مکان کریکت. در مجموعه مقالات ششمین کنفرانس بین المللی سالانه محاسبات و شبکه های موبایل، بوستون، MA، ایالات متحده آمریکا، 6 تا 11 اوت 2000. صص 32-43. [ Google Scholar ]
- لو، جی. فن، ال. Li, H. سیستم های موقعیت یابی داخلی بر اساس ارتباطات نور مرئی: وضعیت هنر. IEEE Commun. Surv. معلم خصوصی 2017 ، 19 ، 2871-2893. [ Google Scholar ] [ CrossRef ]
- وو، تی. لیو، جی. لی، ز. لیو، ک. Xu, B. موقعیت یابی دقیق بصری داخل گوشی هوشمند بر اساس نقشه فوتورئالیستی سه بعدی با دقت بالا. Sensors 2018 , 18 , 1974. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- چاپره، ی. ایگنیاتویچ، آ. سنویراتنه، ا. Jha, S. Csi-mimo: سیستم انگشت نگاری وای فای داخلی. در مجموعه مقالات سی و نهمین کنفرانس سالانه IEEE در مورد شبکه های کامپیوتری محلی، ادمونتون، AB، کانادا، 8 تا 11 سپتامبر 2014. ص 202-209. [ Google Scholar ]
- وانگ، ایکس. گائو، ال. مائو، اس. Pandey، S. اثر انگشت مبتنی بر CSI برای محلی سازی داخلی: یک رویکرد یادگیری عمیق. IEEE Trans. وه تکنولوژی 2016 ، 66 ، 763-776. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لی، بی. گالاگر، تی. Dempster، AG; Rizos, C. استفاده از میدان مغناطیسی به تنهایی برای موقعیت یابی داخل ساختمان چقدر امکان پذیر است؟ در مجموعه مقالات کنفرانس بین المللی 2012 در موقعیت یابی داخلی و ناوبری داخلی (IPIN)، سیدنی، استرالیا، 13 تا 15 نوامبر 2012. صفحات 1-9. [ Google Scholar ]
- کیم، اچ اس. سئو، دبلیو. Baek، KR سیستم موقعیت یابی داخلی با استفاده از ناوبری نقشه میدان مغناطیسی و یک سیستم رمزگذار. Sensors 2017 , 17 , 651. [ Google Scholar ] [ CrossRef ]
- اشمیت، ای. اینوپاکوتیکا، دی. موندلاموری، ر. Akopian، D. SDR-Fi: موقعیت یابی داخلی مبتنی بر یادگیری عمیق از طریق رادیو تعریف شده توسط نرم افزار. دسترسی IEEE 2019 ، 7 ، 145784–145797. [ Google Scholar ] [ CrossRef ]
- چن، ال. پی، ال. کوسنیمی، اچ. چن، ی. کروگر، تی. ترکیب چن، آر بیزی برای موقعیت یابی داخل ساختمان با استفاده از اثر انگشت بلوتوث. سیم. پارس اشتراک. 2013 ، 70 ، 1735-1745. [ Google Scholar ] [ CrossRef ]
- چن، ال. کوسنیمی، اچ. چن، ی. لیو، جی. پی، ال. روتسالاینن، ال. چن، R. محدودیت فیلتر کالمن برای بومی سازی بلوتوث داخلی. در مجموعه مقالات بیست و سومین کنفرانس اروپایی پردازش سیگنال 2015 (EUSIPCO)، نیس، فرانسه، 31 اوت تا 4 سپتامبر 2015. صفحات 1915-1919. [ Google Scholar ]
- ژوانگ، ی. یانگ، جی. لی، ی. چی، ال. El-Sheimy، N. محلی سازی داخلی مبتنی بر تلفن هوشمند با چراغ های کم مصرف بلوتوث. Sensors 2016 , 16 , 596. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- وانگ، اچ. سن، اس. الگهری، ع. فرید، م. یوسف، م. Choudhury، RR بدون نیاز به رانندگی جنگی: محلی سازی داخل ساختمان بدون نظارت. در مجموعه مقالات دهمین کنفرانس بین المللی سیستم های تلفن همراه، برنامه های کاربردی و خدمات، منطقه دریاچه، انگلستان، 26-29 ژوئن 2012. صص 197-210. [ Google Scholar ]
- شن، جی. چن، ز. ژانگ، پی. موسیبرودا، تی. Zhang, Y. Walkie-Markie: نقشه برداری مسیرهای داخلی آسان شد. در مجموعه مقالات دهمین سمپوزیوم {USENIX} در طراحی و پیادهسازی سیستمهای شبکهای ({NSDI} 13)، Lombard، IL، ایالات متحده آمریکا، 2-5 آوریل 2013. صص 85-98. [ Google Scholar ]
- کیم، ی. شین، اچ. Cha, H. سیستم ردیابی عابر پیاده مبتنی بر Wi-Fi که مشکل واریانس RSS را تحمل می کند. در مجموعه مقالات کنفرانس بین المللی IEEE در سال 2012 در مورد محاسبات و ارتباطات فراگیر، لوگانو، سوئیس، 19 تا 23 مارس 2012. صص 11-19. [ Google Scholar ]
- پالمبو، اف. بارسوچی، پی. چسا، اس. آگوستو، JC رویکردی استیگمرژیک برای محلیسازی فضای داخلی با استفاده از چراغهای کم انرژی بلوتوث. در مجموعه مقالات دوازدهمین کنفرانس بین المللی IEEE در سال 2015 در زمینه نظارت بر ویدئو و سیگنال پیشرفته (AVSS)، کارلسروهه، آلمان، 25 تا 28 اوت 2015. صص 1-6. [ Google Scholar ]
- ژائو، ایکس. شیائو، ز. مارکهام، ای. تریگونی، ن. Ren, Y. آیا BTLE با WiFi مقایسه میکند؟ در مقایسه عملکرد مکان داخلی. در مجموعه مقالات بی سیم اروپا 2014، بیستمین کنفرانس بی سیم اروپا، کاستلدفلز، اسپانیا، 14-16 مه 2014. صص 1-6. [ Google Scholar ]
- روسلی، من؛ علی، م. جمیل، ن. Din, MM یک الگوریتم موقعیت یابی داخلی بهبود یافته بر اساس تکنیک rssi-trilateration برای اینترنت اشیا (iot). در مجموعه مقالات کنفرانس بین المللی 2016 مهندسی کامپیوتر و ارتباطات (ICCCE)، کوالالامپور، مالزی، 25 تا 27 ژوئیه 2016؛ صص 72-77. [ Google Scholar ]
- داگ، تی. Arsan, T. الگوریتم لایهبندی حداقل مربعات بر اساس قدرت سیگنال برای محلیسازی داخلی. محاسبه کنید. برق مهندس 2018 ، 66 ، 114-126. [ Google Scholar ] [ CrossRef ]
- یونگ، جی. Myung, H. بومی سازی کاربر داخلی مبتنی بر محدوده با استفاده از مدل مسیر سیگنال منعکس شده. در مجموعه مقالات پنجمین کنفرانس بین المللی IEEE در مورد اکوسیستم ها و فناوری های دیجیتال (IEEE DEST 2011)، Daejeon، کره، 31 مه تا 3 ژوئن 2011. صص 251-256. [ Google Scholar ]
- چوانگ، پی جی. Wu، CP استفاده از PSO برای تقویت محلیسازی گره مبتنی بر محدوده RSS برای شبکههای حسگر بیسیم. J. Inf. علمی مهندس 2011 ، 27 ، 1597-1611. [ Google Scholar ]
- چان، FK; بنابراین، HC Accurate الگوریتم موقعیتیابی مبتنی بر برد را برای شبکههای حسگر بیسیم توزیع کرد. IEEE Trans. فرآیند سیگنال 2009 ، 57 ، 4100-4105. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کولوچیا، ا. Ricciato، F. محلی سازی مبتنی بر RSS از طریق محدوده بیزی و موقعیت حداقل مربعات تکراری. IEEE Commun. Lett. 2014 ، 18 ، 873-876. [ Google Scholar ] [ CrossRef ]
- لیو، سی. اسکات، تی. وو، ک. هافمن، دی. محلی سازی حسگر بدون برد با همپوشانی حلقه بر اساس مقایسه نشانگر قدرت سیگنال دریافتی. IJSNet 2007 ، 2 ، 399-413. [ Google Scholar ] [ CrossRef ]
- راجاگوپال، ن. چایاپاتی، اس. سینوپولی، بی. Rowe، A. قرار دادن Beacon برای محلی سازی فضای داخلی مبتنی بر محدوده. در مجموعه مقالات کنفرانس بین المللی 2016 در موقعیت یابی داخلی و ناوبری داخلی (IPIN)، ساپورو، ژاپن، 18 تا 21 سپتامبر 2016؛ صص 1-8. [ Google Scholar ]
- الباکلی، ر. یوسف، ام. یک سیستم محلی سازی مبتنی بر RF با کالیبراسیون صفر قوی برای محیط های واقعی. در مجموعه مقالات سیزدهمین کنفرانس بین المللی سالانه IEEE در سال 2016 در مورد سنجش، ارتباطات و شبکه (SECON)، لندن، بریتانیا، 27 تا 30 ژوئن 2016؛ صفحات 1-9. [ Google Scholar ]
- لاسلا، ن. یونس، م.ف. اوادجاوت، ا. Badache, N. الگوریتم محلی سازی موثر بر اساس منطقه برای شبکه های بی سیم. IEEE Trans. محاسبه کنید. 2014 ، 64 ، 2103-2118. [ Google Scholar ] [ CrossRef ]
- او، تی. هوانگ، سی. بلوم، بی.ام. استانکوویچ، جی. Abdelzaher, T. طرح های محلی سازی بدون محدوده برای شبکه های حسگر در مقیاس بزرگ. در مجموعه مقالات نهمین کنفرانس بین المللی سالانه محاسبات تلفن همراه و شبکه، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، 14 تا 19 سپتامبر 2003. صص 81-95. [ Google Scholar ]
- Sheu، JP; چن، کامپیوتر; Hsu، CS یک طرح محلیسازی توزیعشده برای شبکههای حسگر بیسیم با بهبود شبکه اسکن و اصلاح مبتنی بر برداری. IEEE Trans. اوباش محاسبه کنید. 2008 ، 7 ، 1110-1123. [ Google Scholar ] [ CrossRef ]
- دای، اچ. یانگ، WH; Xu, J. شبکه عصبی چند لایه برای محلی سازی داخلی مبتنی بر قدرت سیگنال دریافتی. IET Commun. 2016 ، 10 ، 717-723. [ Google Scholar ] [ CrossRef ]
- خطاب، ز. حاجی حسینی، ع. قرشی، SA یک روش اثر انگشت برای محلیسازی فضای داخلی با استفاده از دستگاه یادگیری عمیق عمیق مبتنی بر رمزگذار خودکار. IEEE Sens. Lett. 2017 ، 2 ، 1-4. [ Google Scholar ] [ CrossRef ]
- لی، ز. خو، ک. وانگ، اچ. ژائو، ی. وانگ، ایکس. شن، ام. موقعیت یابی مبتنی بر یادگیری ماشینی: نظرسنجی و جهت گیری های آینده. IEEE Netw. 2019 ، 33 ، 96-101. [ Google Scholar ] [ CrossRef ]
- سلامه، ق. تمازین، م. شارکاس، MA; Khedr, M. یک سیستم محلی سازی داخلی WiFi پیشرفته بر اساس یادگیری ماشینی. در مجموعه مقالات کنفرانس بین المللی 2016 در موقعیت یابی داخلی و ناوبری داخلی (IPIN)، آلکالا د هنارس، مادرید، اسپانیا، 4 تا 7 اکتبر 2016؛ صص 1-8. [ Google Scholar ]
- نرگئیزیان، سی. Nerguizian، V. موقعیت جغرافیایی انگشت نگاری داخلی با استفاده از ویژگی های مبتنی بر موجک استخراج شده از پاسخ ضربه کانال در ارتباط با یک شبکه عصبی مصنوعی. در مجموعه مقالات سمپوزیوم بین المللی IEEE 2007 در الکترونیک صنعتی، ویگو، اسپانیا، 4 تا 7 ژوئن 2007. صفحات 2028–2032. [ Google Scholar ]
- شانگ، جی. هو، ایکس. گو، اف. وانگ، دی. یو، اس. طرح های بهبود برای تخمین مکان موبایل داخلی: یک نظرسنجی. ریاضی. مشکل مهندس 2015 , 2015 . [ Google Scholar ] [ CrossRef ]
- شو، دبلیو. یو، ک. هوآ، ایکس. لی، کیو. کیو، دبلیو. خوشهبندی نقاط مرجع مبتنی بر موقعیتهای مجازی و وزندهی مبتنی بر فاصله فیزیکی برای موقعیتیابی Wi-Fi داخلی. IEEE Internet Things J. 2018 , 5 , 3031–3042. [ Google Scholar ] [ CrossRef ]
- مو، ی. کای، ی. وانگ، بی. یک روش جدید محلی سازی داخلی بر اساس تخمین AP مجازی. در مجموعه مقالات کنفرانس بین المللی ارتباطات IEEE در سال 2012 (ICC)، اتاوا، ON، کانادا، 10-15 ژوئن 2012. صص 5508–5512. [ Google Scholar ]
- لیو، اچ. یانگ، موقعیت یابی فضای داخلی مبتنی بر وای فای YN برای محیط چند طبقه. در مجموعه مقالات کنفرانس TENCON 2011-2011 IEEE منطقه 10، بالی، اندونزی، 21-24 نوامبر 2011. صص 597-601. [ Google Scholar ]
- Coolidge, JL A Treatise on the Circle and the Sphere ; Clarendon Press: آکسفورد، انگلستان، 1916. [ Google Scholar ]
- او هست.؛ موقعیت یابی فضای داخلی مبتنی بر اثر انگشت Chan، SHG Wi-Fi: پیشرفت ها و مقایسه های اخیر. IEEE Commun. Surv. معلم خصوصی 2015 ، 18 ، 466-490. [ Google Scholar ] [ CrossRef ]
- فنگ، سی. او، WSA؛ ولایی، س. Tan, Z. موقعیت یابی داخلی بر اساس قدرت سیگنال دریافتی با استفاده از سنجش فشاری. IEEE Trans. اوباش محاسبه کنید. 2011 ، 11 ، 1983-1993. [ Google Scholar ] [ CrossRef ]
- Au، AWS؛ فنگ، سی. ولایی، س. ریس، اس. سرور، س. مارکوویتز، SN; طلا، دی. گوردون، ک. آیزنمن، ام. ردیابی و ناوبری داخلی با استفاده از قدرت سیگنال دریافتی و سنجش فشاری در دستگاه تلفن همراه. IEEE Trans. اوباش محاسبه کنید. 2012 ، 12 ، 2050-2062. [ Google Scholar ] [ CrossRef ]
- او هست.؛ Chan، SHG Tilejunction: کاهش نویز سیگنال برای محلی سازی داخلی بر اساس اثر انگشت. IEEE Trans. اوباش محاسبه کنید. 2015 ، 15 ، 1554-1568. [ Google Scholar ] [ CrossRef ]
- او هست.؛ Chan, SHG Sectjunction: محلیسازی Wi-Fi داخلی بر اساس اتصال بخشهای سیگنال. در مجموعه مقالات کنفرانس بین المللی ارتباطات IEEE در سال 2014 (ICC)، سیدنی، استرالیا، 10 تا 14 ژوئن 2014. صص 2605–2610. [ Google Scholar ]
- جیانگ، ی. پان، X. لی، ک. Lv، Q. دیک، RP; هانیگان، ام. Shang, L. Ariel: انگشت نگاری خودکار اتاق مبتنی بر وای فای برای محلی سازی داخل ساختمان. در مجموعه مقالات کنفرانس ACM 2012 در مورد محاسبات همه جا حاضر، پیتسبورگ، PA، ایالات متحده، 5-8 سپتامبر 2012. ص 441-450. [ Google Scholar ]
- شین، بی. لی، جی اچ. لی، تی. الگوریتم Kim، HS پیشرفته K وزنی نزدیکترین همسایه برای سیستم های موقعیت یابی Wi-Fi داخلی. در مجموعه مقالات هشتمین کنفرانس بین المللی 2012 در فناوری محاسبات و مدیریت اطلاعات (NCM و ICNIT)، سئول، کره، 24-26 آوریل 2012. جلد 2، ص 574–577. [ Google Scholar ]
- یانگ، ز. وو، سی. لیو، ی. مکان یابی در فضای اثر انگشت: مکان یابی فضای داخلی بی سیم با دخالت اندک انسان. در مجموعه مقالات هجدهمین کنفرانس بین المللی سالانه محاسبات و شبکه های سیار، استانبول، ترکیه، 22 تا 26 اوت 2012. صص 269-280. [ Google Scholar ]
- لیو، اس. هوآ، ایکس. کیو، دبلیو. ژانگ، دبلیو. He, X. الگوریتم موقعیت یابی اثر انگشت WiFi بهبود یافته. جی. ژئومات. 2017 ، 42 ، 46-49. [ Google Scholar ]
- نیو، جی. وانگ، بی. شو، ال. Duong، TQ; Chen, Y. ZIL: یک سیستم محلی سازی داخلی کم مصرف با استفاده از رادیو ZigBee برای تشخیص اثر انگشت WiFi. IEEE J. Sel. مناطق کمون. 2015 ، 33 ، 1431-1442. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هو، ایکس. شانگ، جی. گو، اف. هان، کیو. بهبود موقعیتیابی Wi-Fi در فضای داخلی از طریق AP، شباهت و خوشهبندی انتشار قرابت نیمه نظارت شده را تنظیم میکند. بین المللی J. Distrib. Sens. Netw. 2015 ، 11 ، 109642. [ Google Scholar ] [ CrossRef ]
- لبینگیسا، بی. پارک، جی اس. Lee, DM سیستم محلی سازی داخلی را بر اساس نقاط دسترسی مجازی در یک محیط Wi-Fi با طرح های فیلتر بهبود بخشید. در مجموعه مقالات کنفرانس بین المللی 2017 در موقعیت یابی داخلی و ناوبری داخلی (IPIN)، ساپورو، ژاپن، 18 تا 21 سپتامبر 2017؛ صص 1-7. [ Google Scholar ]
- لی، دی.م. Labinhisa، B. سیستم محلی سازی داخلی بر اساس نقاط دسترسی مجازی با طرح های فیلتر. بین المللی J. Distrib. Sens. Netw. 2019 ، 15 ، 1550147719866135. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- شو، دبلیو. کیو، دبلیو. هوآ، ایکس. Yu, K. بهبود اندازه گیری RSSI Wi-Fi برای محلی سازی داخل ساختمان. IEEE Sensors J. 2017 , 17 , 2224-2230. [ Google Scholar ] [ CrossRef ]
- باهل، ص. Padmanabhan، VN RADAR: یک سیستم مکان یابی و ردیابی کاربر مبتنی بر RF در ساختمان. در مجموعه مقالات کنفرانس IEEE INFOCOM 2000 در زمینه ارتباطات کامپیوتری. نوزدهمین کنفرانس مشترک سالانه انجمن های کامپیوتر و ارتباطات IEEE (شماره گربه 00CH37064)، ال آویو، اسرائیل، 26 تا 30 مارس 2000. جلد 2، ص 775–784. [ Google Scholar ]
- چن، جی. وانگ، اس. اویانگ، ام. ژوان، ی. الگوریتم موقعیت یابی تکراری لی، KC برای گره داخلی بر اساس تصحیح فاصله در شبکه های بی سیم. Sensors 2019 , 19 , 4871. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]


بدون دیدگاه