

خلاصه
کلید واژه ها:
فضای رنگی Luv ; تقسیم بندی حوضه ; ادغام منطقه ؛ خطر شیب ; سنجش از دور
1. معرفی
2. منطقه مطالعه و پیش پردازش داده ها
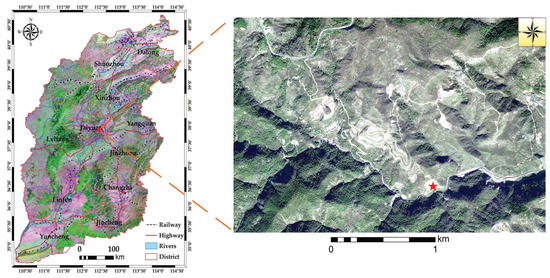
2.1. منطقه مطالعه
2.2. منابع داده و پیش پردازش
3. روش شناسی
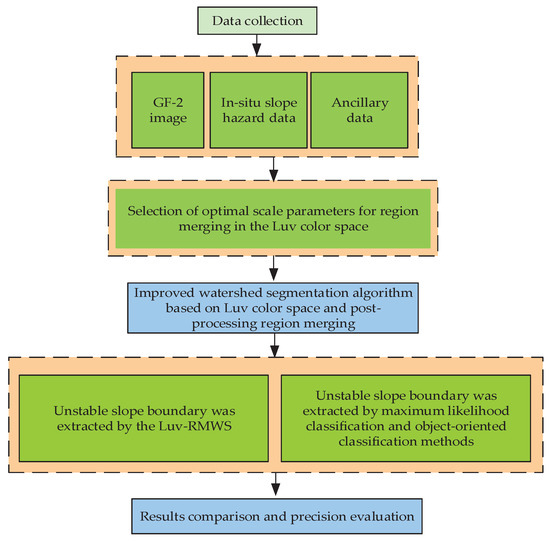
3.1. رویه فنی
3.2. فضای رنگ و دگرگونی Luv
2. با فرض اینکه مختصات فضای رنگ استاندارد RGB باشد، مختصات رنگی نسبتا یکنواخت L , u , v را می توان از طریق تبدیل فضای رنگی به دست آورد [ 49 ].
جایی که توn”و vn”مختصات منبع نور استاندارد CIE و مقادیر tristimulus هستند که توسط
در فضای رنگی Luv، تفاوت بین هر دو رنگ به عنوان انحراف رنگی نامیده می شود. انحراف رنگی فاصله بین موقعیت های رنگی است که به صورت ∆ E بیان می شود ، یعنی انحراف رنگی بین دو رنگ به صورت زیر محاسبه می شود:
که ∆ L تفاوت در روشنایی است و ∆ u و ∆ v به ترتیب تفاوت بین دو رنگ در جهتهای u و v هستند.
3.3. اندازه گیری شباهت ادغام منطقه بر اساس فضای رنگی Luv
3.3.1. پارامترهای مقیاس تقسیم بندی بهینه
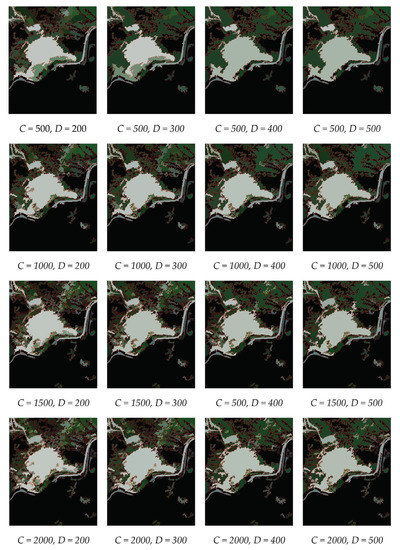
پارامتر کلیدی برای انتخاب پارامترهای مقیاس توسط الگوریتم تقسیمبندی حوضه، مقدار آستانه ( Amin ) ناحیه حداقل است . با تعریف M به عنوان مقدار ردیف یک تصویر، N به عنوان مقدار ستون، و C به عنوان یک ثابت معین، و در نظر گرفتن تعداد پیکسل ها به عنوان حداقل منطقه برای تعیین آستانه، به دست می آوریم:
3.3.2. پارامترهای مقیاس ادغام بهینه
فرض کنید که Ri و Rj دو ناحیه تصویر G هستند که با تقسیم بندی حوضه تقسیم می شوند. برای از بین بردن تأثیر تفاوت اندازه مناطق در طول فرآیند ادغام، یک معادله محاسبه بهبود یافته (معادله 10) برای به دست آوردن انحراف رنگی مناطق مجاور در فضای رنگی Luv پیشنهاد شد.
کجا | R i |، | R j | تعداد پیکسل های موجود در نواحی تصویر R i و R j هستند. F c (R i ) ، F c (R j ) میانگین رنگ های مناطق تصویر R i و R j هستند و n تعداد مناطق مجاور است.
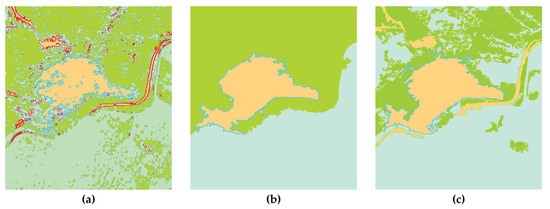
4. روش های مقایسه ای و ارزیابی دقت
4.1. طبقه بندی حداکثر احتمال
طبقه بندی حداکثر درستنمایی (MLC) به عنوان طبقه بندی بیز نیز شناخته می شود. برای محاسبه احتمال (احتمال) برای هر پیکسل در هر دسته، پیکسل ها با استفاده از حداکثر احتمال طبقه بندی می شوند [ 53 ]. فرض بر این است که k نوع از اشیاء زمینی در تصویر سنجش از دور وجود دارد و دسته i یک شی زمینی با wi نشان داده می شود و احتمال قبلی برای هر دسته P( w i ) است . با توجه به دسته X ناشناخته ، احتمال شرطی که در کلاس w i ظاهر می شود P(X|w i ) است.(همچنین احتمال احتمال w i نامیده می شود). با توجه به قضیه بیز، احتمال پسین دسته را می توان به صورت زیر بدست آورد:
که در آن P(X) یک ثابت برای هر دسته است و تابع تفکیک را می توان به صورت زیر ساده کرد:
4.2. طبقه بندی شی گرا
یک الگوریتم تقسیم بندی چند مقیاسی در طبقه بندی شی گرا (OOC) اتخاذ شده است که کلید آن تعیین پارامترهای تقسیم بندی بهینه است. در حال حاضر، آزمایشهای تکراری اغلب بر روی تصاویر قبل از تقسیمبندی انجام میشوند و بهترین پارامترهای بخشبندی به صورت بصری با آزمون آزمون و خطا مورد قضاوت قرار میگیرند. ناهمگونی کلی اشیاء تقسیم بندی تصویر توسط پارامترهای ناهمگنی طیفی و شکل [ 54 ] کنترل می شود، و بیان با
که در آن h ناهمگونی کلی شی است. رنگ h ناهمگونی طیفی است. شکل h ناهمگونی شکل است . رنگ ω وزن ناهمگونی طیفی است. شکل ω وزن ناهمگونی شکل است و ω رنگ + ω شکل = 1. ناهمگونی شکل به طور جامع با صافی و فشردگی بیان می شود، و معادله با داده می شود.
که در آن ω com وزن فشردگی سفارشی است، ω smooth وزن همواری سفارشی است، و مجموع ω com و ω smooth 1 است.
4.3. معیارهای ارزیابی دقت
معمولاً، مقدار ویژگی مرجع در داده های مرجع با Rf نشان داده می شود ، در حالی که مقدار واقعی ویژگی در نتیجه تصویر قطعه بندی شده با Sf نشان داده می شود ، و سپس تفاوت مطلق آنها با [ 55 ] ارائه می شود.
فرض کنید A 0 مقدار ناحیه هدف در دادههای معیار، و A S مقدار منطقه هدف در نتیجه تصویر تقسیمبندی باشد، سپس خطای نسبی آنها δA با
که در آن δ A ضریب دقت ناحیه مورد استفاده برای ارزیابی نتیجه تقسیم بندی تصویر است. δ A کوچکتر مربوط به دقت تقسیم بندی بالاتر است و در غیر این صورت دقت کمتر است.
فرض کنید P t و Pw به ترتیب نشان دهنده تعداد پیکسل هایی هستند که به درستی و نادرست تقسیم بندی شده اند، سپس میزان خطا δ P با
جایی که δ P یک ارزیابی کلی از دقت تقسیم بندی تصویر ارائه می دهد. δ P کوچکتر مربوط به دقت تقسیم بندی بالاتر است و در غیر این صورت دقت کمتر است.
5. نتایج
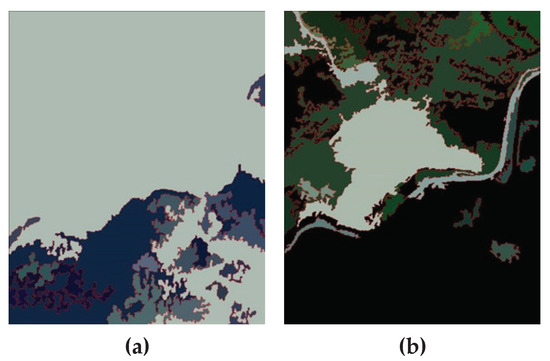
5.1. نتایج تقسیم بندی بر اساس تصویر تجربی
5.2. انتخاب پارامترهای مقیاس بهینه
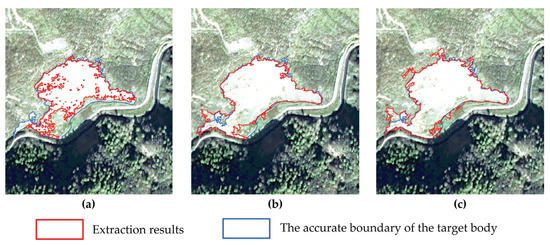
5.3. استخراج مرز خطر شیب
5.4. زمان پردازش
5.5. دقت استخراج
6. بحث
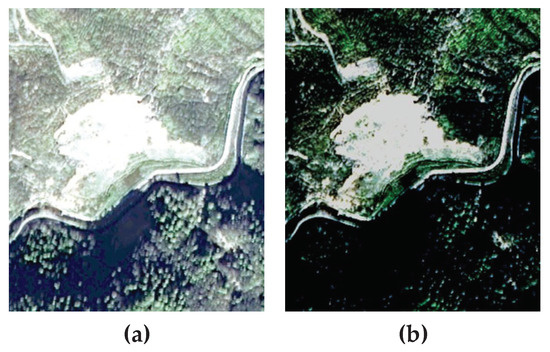
6.1. تجزیه و تحلیل تقسیم بندی تصویر قبل و بعد از تقویت کنتراست
6.2. تجزیه و تحلیل پارامترهای مقیاس بهینه
6.3. تجزیه و تحلیل اثر استخراج
6.4. تجزیه و تحلیل روش پیشنهادی
7. نتیجه گیری
منابع
- کلانتر، بی. پرادان، بی. نقیبی، س. متولی، ع. منصور، اس. ارزیابی اثرات انتخاب دادههای آموزشی بر روی نقشهبرداری حساسیت زمین لغزش: مقایسه بین ماشین بردار پشتیبانی (SVM)، رگرسیون لجستیک (LR) و شبکههای عصبی مصنوعی (ANN). Geomat. نات. خطر خطرات 2018 ، 9 ، 49-69. [ Google Scholar ] [ CrossRef ]
- پنگ، ال. Xu، SN; می، جی جی. شناسایی زمین لغزش ناشی از زلزله Su، FH با استفاده از تصویر سنجش از دور با وضوح بالا. J. Remote Sens. 2017 ، 4 ، 509–518. [ Google Scholar ]
- هرواس، جی. باردو، جی. Rosin, PL; پاسوتو، ا. مانتوانی، ف. سیلوانو، اس. نظارت بر لغزش ها از تصاویر سنجش از راه دور نوری: تاریخچه مورد زمین لغزش Tessina، ایتالیا. ژئومورفولوژی 2003 ، 54 ، 63-75. [ Google Scholar ] [ CrossRef ]
- موندینی، AC; گوزتی، اف. رایشنباخ، پ. روسی، ام. کاردینالی، م. Ardizzone، F. شناسایی و نقشه برداری نیمه خودکار زمین لغزش های کم عمق ناشی از بارندگی با استفاده از تصاویر ماهواره ای نوری. سنسور از راه دور محیط. 2011 ، 115 ، 1743-1757. [ Google Scholar ] [ CrossRef ]
- ژان، ZQ; Lai، BH یک الگوریتم جدید فیلتر DSM برای پایش زمین لغزش بر اساس محدودیتهای چندگانه. IEEE J. STARS 2015 ، 8 ، 324-331. [ Google Scholar ]
- ژانگ، MM; ژو، YA; لی، جی. Shang، CS شناسایی زمین لغزش ها و فروپاشی ها بر اساس تصاویر سنجش از دور و DEM. Mine Surv. 2016 ، 44 ، 28-31. [ Google Scholar ]
- محمد، د.ح. چن، DM Segmentation برای تجزیه و تحلیل تصویر مبتنی بر شی (OBIA): بررسی الگوریتم ها و چالش ها از دیدگاه سنجش از دور. ISPRS J. Photogramm. 2019 ، 150 ، 115-134. [ Google Scholar ]
- وینسنت، ال. Soille، P. حوضه های آبخیز در فضاهای دیجیتال: یک الگوریتم کارآمد بر اساس شبیه سازی غوطه وری. IEEE Trans. الگوی مقعدی ماخ هوشمند 1991 ، 13 ، 583-598. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هاگیارد، دی. رزاز، م. اتکین، P. تجزیه و تحلیل الگوریتم های حوزه آبخیز برای تصاویر مقیاس خاکستری. در مجموعه مقالات سومین کنفرانس بین المللی IEEE در مورد پردازش تصویر، لوزان، سوئیس، 19 سپتامبر 1996; جلد 3، ص 41-44. [ Google Scholar ]
- شافارنکو، ال. پترو، م. Kittler, J. تقسیم خودکار حوضه از تصاویر رنگی بافت تصادفی. IEEE Trans. فرآیند تصویر 1997 ، 6 ، 1530-1544. [ Google Scholar ] [ CrossRef ]
- اسمت، PD; Pires، RL پیاده سازی و تجزیه و تحلیل یک الگوریتم بهینه سازی شده برای بارش باران. در ارتباطات تصویر و تصویر و پردازش انجمن بین المللی اپتیک و فوتونیک ; مجموعه مقالات SPIE: سن خوزه، کالیفرنیا، ایالات متحده آمریکا، 2000. [ Google Scholar ]
- بینیک، ا. Moga, A. الگوریتم حوضه آبخیز کارآمد بر اساس اجزای متصل. تشخیص الگو 2000 ، 33 ، 907-916. [ Google Scholar ] [ CrossRef ]
- Soille, P. تجزیه و تحلیل تصویر مورفولوژیکی – اصول و کاربردها , 2nd ed.; Springer: برلین، آلمان، 2004; صص 268-276. [ Google Scholar ]
- یو، ی. لی، بی اف. ژانگ، XW; لیو، YP; الگوریتم تقسیمبندی حوضه آبخیز لی، HQ مشخص شده برای تصاویر RGBD. J. نمودار تصویر. 2016 ، 21 ، 145-154. [ Google Scholar ]
- ژانگ، جی تی. Zhang، LM یک الگوریتم حوضه آبخیز که اطلاعات طیفی و بافت را برای تقسیمبندی تصویر سنجش از دور با وضوح بالا ترکیب میکند. Geomat. Inf. علمی دانشگاه ووهان 2017 ، 42 ، 449-455. [ Google Scholar ]
- یان، پی اف. مینگ، DP تقسیم بندی داده های سنجش از دور با وضوح فضایی بالا با استفاده از حوضه با پارامترسازی خود تطبیقی. فناوری سنسور از راه دور. Appl. 2018 ، 33 ، 321-330. [ Google Scholar ]
- اسما رویز، وی. گودینو- یورنته، جی. Sáenz-Lechón، N.; گومز-ویلدا، پی. یک الگوریتم بهبود یافته حوضه بر اساس محاسبه کارآمد کوتاه ترین مسیرها. تشخیص الگو 2007 ، 40 ، 1078-1090. [ Google Scholar ] [ CrossRef ]
- شیائو، پی اف. ژائو، SH; او، تقسیمبندی تصویر IKONOS چندطیفی JF بر اساس الگوریتم حوضه کنترلشده با نشانگر بافت. MIPPR 2007: سنجش از دور و پردازش دادههای GIS و کاربردها و فناوریها و کاربردهای چند طیفی نوآورانه، انجمن بینالمللی اپتیک و فوتونیک، ووهان، چین، 2007. بینالمللی . علائم چند طیفی. فرآیند تصویر تشخیص الگو 2007 . [ Google Scholar ] [ CrossRef ]
- لی، DR; ژانگ، جی اف. Wu، ZC; Yi, LN یک الگوریتم حوضه آبخیز مبتنی بر نشانگر تعبیه شده برای تقسیم بندی تصویر سنجش از دور با وضوح فضایی بالا. IEEE Trans. فرآیند تصویر 2010 ، 19 ، 2781-2787. [ Google Scholar ]
- رضوی، IA; موهان، BK; Bhatia، PR تقسیم بندی با وضوح چندگانه تصاویر سنجش از راه دور با وضوح بالا با استفاده از تبدیل حوضه آبخیز کنترل شده با نشانگر. در مجموعه مقالات کنفرانس و کارگاه بین المللی در مورد روندهای نوظهور در فناوری، بمبئی، ماهاراشترا، هند، 25 تا 26 فوریه 2011. [ Google Scholar ]
- بالا، A. تکنیک تقسیمبندی تصویر حوضه آبخیز بهبودیافته با استفاده از MATLAB. بین المللی J. Sci. مهندس 2012 ، 3 ، 1-4. [ Google Scholar ]
- Ng، HP; Ong، SH; فونگ، KWC؛ گوه، PS; نوینسکی، تقسیمبندی WL Masseter با استفاده از الگوریتم بهبود یافته حوضه با طبقهبندی بدون نظارت. محاسبه کنید. Biol. پزشکی 2008 ، 38 ، 171-184. [ Google Scholar ] [ CrossRef ]
- Xu، TZ; ژانگ، جی سی؛ Jia, Y. تقسیم بندی تصویر رنگی بر اساس شیب مورفولوژی و الگوریتم حوزه آبخیز. محاسبه کنید. مهندس Appl. 2016 ، 52 ، 200-203. [ Google Scholar ]
- چن، جی. الگوریتم تقسیمبندی تصویر همراه با مدل منظم زدایی PM و الگوریتم بهبود یافته حوضه. جی. مد. Imaging Health Inform. 2020 ، 10 ، 515-521. [ Google Scholar ] [ CrossRef ]
- گراو، وی. میوس، AUJ; آلکانیز، م. کیکینیس، آر. Warfield، SK تغییر حوضه بهبود یافته برای تقسیمبندی تصویر پزشکی با استفاده از اطلاعات قبلی. IEEE Trans. پزشکی تصویربرداری 2004 ، 23 ، 447-458. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- لی، بی. پان، م. Wu، ZX یک تقسیم بندی بهبود یافته از تصویر سنجش از دور با وضوح مکانی بالا با استفاده از الگوریتم حوضه آبخیز مبتنی بر نشانگر. در مجموعه مقالات بیستمین کنفرانس بین المللی ژئوانفورماتیک، هنگ کنگ، چین، 15 تا 17 ژوئن 2012. [ Google Scholar ]
- ژو، YA; ژانگ، MM; ژائو، جی ال. Guo، QH; Ma, R. مطالعه ارزیابی کیفیت تصاویر چند منبعی و چند مقیاسی در پیشگیری از بلایا و امداد رسانی. Disaster Adv. 2012 ، 5 ، 1623-1626. [ Google Scholar ]
- Wang, Y. الگوریتم تقسیمبندی حوضه علامتگذاری شده تطبیقی برای تصاویر گلبولهای قرمز خون. J. نمودار تصویر. 2018 ، 22 ، 1779-1787. [ Google Scholar ]
- جیا، XY; جیا، ژ. وی، YM; تقسیم بندی Liu، LZ حوضه با بازسازی سلسله مراتبی گرادیان در فضای رنگی حریف. محاسبه کنید. علمی 2018 ، 45 ، 212-217. [ Google Scholar ]
- یاسنوف، WA; Mui، JK; خطای Bacus، JW برای تقسیم بندی صحنه اندازه گیری می کند. تشخیص الگو 1977 ، 9 ، 217-231. [ Google Scholar ] [ CrossRef ]
- دورن، LKA؛ مایر، بی. Seijmonsbergen، AC نقشهبرداری جنگلی مبتنی بر Landsat را در زمینهای شیبدار کوهستانی با استفاده از طبقهبندی مبتنی بر شی بهبود داد. برای. Ecol. مدیریت 2003 ، 183 ، 31-46. [ Google Scholar ] [ CrossRef ]
- مینگ، DP; لو، جی سی. ژو، CH; Wang, J. تحقیق در مورد روشهای تقسیمبندی تصویر سنجش از دور با وضوح بالا بر اساس ویژگیها و ارزیابی الگوریتمها. Geoinf. علمی 2006 ، 8 ، 107-113. [ Google Scholar ]
- چن، YY; مینگ، DP; خو، ال. ژائو، ال. مروری بر روشهای تجربی کمی برای ارزیابی تقسیمبندی تصاویر سنجش از دور فضایی بالا. J. Geoinf. علمی 2017 ، 19 ، 818-830. [ Google Scholar ]
- هوانگ، Q. Dom, B. روشهای کمی ارزیابی تقسیم بندی تصویر. در مجموعه مقالات کنفرانس بین المللی پردازش تصویر، واشنگتن دی سی، ایالات متحده آمریکا، 23 تا 26 اکتبر 1995. [ Google Scholar ]
- جوزدانی، س. Chen, DM در مورد تطبیق پذیری معیارهای ارزیابی نظارت شده محبوب و اخیراً پیشنهاد شده برای کیفیت بخشبندی تصاویر سنجش از راه دور: مطالعه موردی تجربی استخراج ساختمان. ISPRS J. Photogramm. 2020 ، 160 ، 275-290. [ Google Scholar ] [ CrossRef ]
- Debelee, TG; شوونکر، اف. رحیمیتو، س. Yohannes, D. ارزیابی الگوریتم تقسیم بندی k-means تطبیقی اصلاح شده. محاسبه کنید. Vis. رسانه 2019 ، 5 ، 347–361. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژانگ، اچ. فریتز، جی. گلدمن، SA ارزیابی تقسیمبندی تصویر: بررسی روشهای بدون نظارت. محاسبه کنید. Vis. تصویر زیر. 2008 ، 110 ، 260-280. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Xiao، FP با رزولوشن بالا سنجش از دور بخش بندی تصویر و استخراج اطلاعات . انتشارات علمی: پکن، چین، 2012; صص 151-156. [ Google Scholar ]
- زو، سی جی; یانگ، اس.زی. Cui, SC; چنگ، دبلیو. چنگ، سی. روش ارزیابی دقت برای تقسیم بندی مبتنی بر شیء تصویر سنجش از دور با وضوح بالا. قطعه لیزر پرقدرت. پرتوها 2015 ، 27 ، 37–43. [ Google Scholar ]
- هوور، آ. ژان باپتیست، جی. جیانگ، XY; فلین، پی جی؛ بونک، اچ. گلدگوف، دی. بویر، ک. Eggert، DW; فیتزگیبون، ا. فیشر، آر. مقایسه تجربی الگوریتمهای تقسیمبندی تصویر محدوده. IEEE Trans. الگوی مقعدی ماخ هوشمند 1996 ، 18 ، 673-689. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- چن، HC; Wang, SJ استفاده از تفاوت رنگ قابل مشاهده در ارزیابی کمی تقسیم بندی تصویر رنگی. در مجموعه مقالات کنفرانس بین المللی IEEE در مورد آکوستیک، گفتار و پردازش سیگنال، مونترال، QC، کانادا، 17-21 مه 2004. [ Google Scholar ]
- هی، GJ; کاستیا، جی. Wulder، MA; Ruiz, JR یک رویکرد خودکار مبتنی بر شی برای تقسیمبندی تصویر چند مقیاسی صحنههای جنگل. بین المللی J. Appl. زمین Obs. Geoinf. 2005 ، 7 ، 339-359. [ Google Scholar ] [ CrossRef ]
- کاردوسو، جی اس. Corte-Real، L. به سوی یک ارزیابی عمومی از تقسیم بندی تصویر. IEEE Trans. فرآیند تصویر 2005 ، 14 ، 1773-1782. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هافمن، پی. Lettmayer، P. بلاشکه، تی. بلژیک، م. وگنکیتل، اس. گراف، آر. Lampoltshammer، TJ; آندریچنکو، وی. به سوی چارچوبی برای تحلیل تصویر مبتنی بر عامل از داده های سنجش از دور. بین المللی J. Image Data Fusion 2015 ، 6 ، 115-137. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژانگ، XL; فنگ، XZ; شیائو، پی اف. او، GJ; ارزیابی کیفیت تقسیم بندی Zhu، LJ با استفاده از اقدامات دقیق و یادآوری مبتنی بر منطقه برای تصاویر سنجش از دور. ISPRS J. Photogramm. 2015 ، 102 ، 73-84. [ Google Scholar ] [ CrossRef ]
- وی، XW; ژانگ، XF; Xue, Y. ارزیابی کیفیت تقسیم بندی تصویر سنجش از دور بر اساس طیف و شکل. J. Geoinf. علمی 2018 ، 20 ، 1489-1499. [ Google Scholar ]
- Li، ZY; مینگ، DP; فن، YL; ژائو، LF; لیو، اس ام مقایسه شاخص های ارزیابی برای تقسیم بندی نظارت شده تصاویر سنجش از دور. J. Geoinf. علمی 2019 ، 21 ، 1265-1274. [ Google Scholar ]
- چن، LF; لیو، YM; Liu, Y. تقسیمبندی تصویر رنگی با ترکیب بهبود یافته حوضه و رشد منطقه. محاسبه کنید. مهندس علمی 2013 ، 35 ، 93-98. [ Google Scholar ]
- Lin, FZ Foundation of Multimedia Technology , 3rd ed.; انتشارات دانشگاه Tsinghua: پکن، چین، 2009; صص 104-106. [ Google Scholar ]
- گائو، دبلیو. ژو، YA; Zhao, JL طراحی و اجرای سیستم ارزیابی کمی کیفیت تولید تصویر سنجش از دور. J. Taiyuan Univ. تکنولوژی 2014 ، 45 ، 776-779. [ Google Scholar ]
- هانسن، مگاوات؛ فیلتر هیگینز، WE Watershed مبتنی بر حداکثر همگنی فیلتر. IEEE Trans. فرآیند تصویر 2002 ، 8 ، 982-988. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Wei, DF وجود دارد جستجو در روش های استخراج خودکار لبه زمین لغزش بر اساس تصویر سنجش از دور. پایان نامه کارشناسی ارشد، دانشگاه جیائوتنگ جنوب غربی، چندو، چین، 2013. [ Google Scholar ]
- بروزون، ال. Prieto، DF بازآموزی بدون نظارت طبقه بندی کننده حداکثر احتمال برای تجزیه و تحلیل تصاویر سنجش از راه دور چند زمانی. IEEE Trans. Geosci. Remote Sens. 2001 , 39 , 456-460. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بااتز، ام. Schäpe، A. تجزیه و تحلیل تصویر شی گرا و چند مقیاسی در شبکه های معنایی. در مجموعه مقالات دومین سمپوزیوم بین المللی در عملیاتی سازی سنجش از دور، Enschede، هلند، 16-21 اوت 1999. [ Google Scholar ]
- Zhang، YJ طبقه بندی و مقایسه تکنیک های ارزیابی برای تقسیم بندی تصویر. J. نمودار تصویر. 1996 ، 1 ، 151-158. [ Google Scholar ]
- هوانگ، تی. بای، XF; ژوانگ، QF; Xu، JH تحقیق در مورد استخراج زمین لغزش بر اساس زلزله Wenchuan در تصویر سنجش از دور GF-1. لیسانس Surv. 2018 ، 2 ، 67-71. [ Google Scholar ]
- لی، کیو. ژانگ، جی اف. لو، ی. جیائو، QS شناسایی زمین لغزش ناشی از زلزله و الگوهای توزیع فضایی ناشی از زلزله جیوژایگو در 8 اوت 2017. J. Remote Sens. 2019 ، 23 ، 785-795. [ Google Scholar ]


بدون دیدگاه