1. معرفی
با افزایش تعداد ساختمانهای بزرگ، فعالیتهای داخلی بیشتر میشوند. اکثر مردم 80 تا 90 درصد از زمان خود را در یک محیط داخلی می گذرانند [ 1 ]، و بسیاری از امکانات و خدماتی که قبلاً در محیط بیرون ارائه می شد، به داخل ساختمان منتقل شده اند [ 2 ]. در این زمینه، خدمات نقشه سنتی که مکان های تسهیلات را با قرار دادن نمادهای نقطه مورد علاقه (POI) بر روی نقشه های فضای باز ارائه می کنند، نمی توانند نیازهای کاربران نقشه در مناطق شهری را برآورده کنند. به عنوان یک نمایش مهم از خدمات مبتنی بر مکان (LBSs)، خدمات نقشه داخلی، که می تواند مکان های تسهیلات داخل ساختمان را به کاربران ارائه دهد، به روند جدیدی در خدمات نقشه تبدیل شده است [ 3 ].]. در مقایسه با فضاهای بیرونی، چگالی اطلاعات در فضاهای داخلی معمولاً بیشتر است [ 4 ]. در عین حال، نقشه های داخلی بیشتر در دستگاه های تلفن همراه استفاده می شوند [ 5 ]. بنابراین، تجسم محتوای اطلاعاتی بهینه شده روی یک صفحه محدود یک موضوع مهم برای تجسم نقشه داخلی است، و کشف روشهای تجسم چند مقیاسی و شخصیشده برای اجازه دادن به نقشههای داخلی برای برآورده کردن نیازهای اطلاعاتی متنوع و چند سطحی کاربران از اهمیت زیادی برخوردار است [ 5 ]. ، 6 ].
در طول چند دهه اخیر، نقشه های داخلی توجه فزاینده ای را از سوی شرکت های تجاری و موسسات علمی به خود جلب کرده است [ 7 ]. برخی از خدمات محبوب نقشه داخلی عبارتند از Google Maps، Apple Maps، و Bing Maps، که نقشههای داخلی مکانهای عمومی محبوب را در قالب ترکیببندیهای مبتنی بر نقشه ارائه میدهند که اتاقها و راهروها را به عنوان پسزمینه و دادههای POI را به عنوان پیشزمینه ادغام میکنند. تحقیقات علمی در مورد خدمات نقشه داخلی عمدتاً بر روی سیستم های موقعیت یابی داخلی [ 8 ]، ناوبری داخلی [ 9 ] و مدل سازی داده های فضایی داخلی [ 10 ] متمرکز شده است. در مقابل، توجه کمی به مطالعه تجسم نقشه داخلی شده است [ 11]. با این حال، تجسم نقشه داخلی پایه و اساس خدمات مکان داخلی است و ممکن است به شدت بر نحوه انتقال موثر اطلاعات نقشه تأثیر بگذارد. بنابراین، بهبود طراحی و وضوح بصری نقشه ها از منظر نقشه برداری برای خدمات مکان یابی داخلی مهم است [ 12 ]. بیشتر نقشه های داخلی هنوز تجسم دوبعدی ساختمان های مورد علاقه هستند. این نقشه ها شامل پلان طبقات معماری و پلان طبقه انتزاعی می باشد. با این حال، اگرچه تجسم دوبعدی برای نمایش سطوح بیرونی مناسب است، که تمایل به داشتن اطلاعات همپوشانی بسیار محدودی دارند، توصیف بعد عمودی محیط های داخلی به این روش دشوار است [ 13 ].]. خروجیهای برخی از روشها و ابزارهای مدلسازی دادههای سهبعدی مرتبط با نقشههای داخلی، از جمله BIM (مدلسازی اطلاعات ساختمان)، CityGML (زبان نشانهگذاری جغرافیای شهر)، و IndoorGML (زبان نشانهگذاری جغرافیای داخلی)، اغلب اشکالی از نقشههای داخلی در نظر گرفته میشوند. 14 ]. با این حال، این روش ها عمدتا برای ساخت و ساز ساختمان، مدل سازی شهری و ناوبری داخلی طراحی شده اند و برای تجسم بهینه سازی نشده اند [ 15 ]. در میان این روشها، استفاده از دادههای BIM در قالبهایی مانند IFC (کلاسهای بنیاد صنعت)، برای نمایش فضای داخلی بسیار رایج است و پیشرفتهای زیادی در رابطه با ادغام این دادهها با سیستم اطلاعات جغرافیایی (GIS) حاصل شده است. ) [ 16]. تجسم BIM قبلاً به عنوان پایه ای برای برنامه های مختلف داخلی عمل کرده است [ 17 ، 18 ]. با این حال، داده های BIM حاوی اطلاعات بیش از حد در مورد اجزای ساختمان است که منجر به حجم داده بزرگ می شود. علاوه بر این، تجسم BIM با استانداردهای موجود محدود شده و فاقد انعطافپذیری است. این ویژگیها تجسمهای BIM را کمی متفاوت از نقشههای نقشهکشی میکند، که بر طراحی کاربر محور و افزایش درک فضایی تمرکز دارد [ 14 ]]. برخی از نقشههای داخلی بر سایر اشکال نوآورانه تجسم، با استفاده از تصاویر پانوراما و واقعیت مجازی، افزوده یا ترکیبی (VR، AR، یا MR) برای ارائه بازنمایی تحت اللفظی محیطهای داخلی که شامل جزئیات بیش از حد نیز میشود، متکی هستند. فقدان انتزاع، دستیابی به یک نمای کلی سریع از یک منطقه بزرگ یا به دست آوردن سریع اطلاعات مفید از چنین نقشه ای را برای کاربران دشوار می کند [ 19 ]. همچنین چندین رویکرد وجود دارد که به شکل نقشههای سهبعدی کارتوگرافی واقعی با معنایی و نمادگرایی انتزاعی، به عنوان مثال، WRLD3D، Indoor3D، و ArcGIS Indoors [ 20 ، 21 ، 22 ] وجود دارد.]. به جای ارائه شکل دقیق محیط نمایش داده شده، اینها نمایش های سه بعدی غیر تحت اللفظی با درجه بالایی از انتزاع هستند. اصول نقشه کشی مانند نمادسازی برای انتقال موثر پیام های مورد نظر استفاده می شود.
از منظر طراحی نقشهبرداری نقشههای داخلی، نشان دادن ساختمان مورد نظر در تعدادی از سطوح جزئیات (LOD) از طریق تعمیم دادهها مهم است [ 5 ]. در حال حاضر برخی از رویکردهای استاندارد برای نمایش LOD داخلی موجود در حوزه های BIM و GIS وجود دارد. BIM از مفهوم سطح توسعه (LODt) برای انعکاس فرآیند طراحی و ساخت تاسیسات استفاده می کند. آخرین نسخه از مشخصات LODt پنج LOD (100، 200، 300، 350، و 400) را با LODt 100 با استفاده از نمادها یا سایر نمایش های تعمیم یافته و LODt 400 مدل سازی اجزای ساختمان با جزئیات و دقت کافی تعریف می کند [ 23 ]]. اگرچه BIM بیشتر یک ابزار معماری است تا یک پلت فرم نقشه برداری، مفهوم LODt همبستگی قوی با LOD ها برای نقشه برداری داخلی دارد [ 24 ]. در حوزه GIS، CityGML به یک نمایش LOD از فضای داخلی نزدیکتر است. پنج LOD برای ساختمان ها تعریف می کند، از کلی ترین LOD0 تا LOD4 دقیق، اما فقط LOD4 از نمایش فضای داخلی ساختمان پشتیبانی می کند. در قالب جدید CityGML 3.0، LOD4 حذف شده و در LOD1-3 ادغام شده است تا از نمایش های متعددی از فضای داخلی ساختمان پشتیبانی کند [ 25 ]. از آنجایی که مفاهیم LOD در BIM و CityGML دارای شباهت هایی هستند، داده های Multi-LOD CityGML را می توان از داده های BIM استخراج کرد تا نمایش های داخلی تعمیم یافته به دست آید [ 26 ].]. برخی از کارهای مرتبط برای بهبود LOD های CityGML، از طریق تلاش هایی مانند جداسازی کامل LOD معنایی (با گنجاندن یا حذف برخی از عناصر در هر LOD) از تعمیم هندسی [ 27 ، 28 ]، ادامه داده اند. همچنین برخی مطالعات وجود دارند که از شکل خاصی از تجسم برای هر LOD استفاده کردهاند، به عنوان مثال، از پلانهای ساده طبقه دوبعدی تا تصاویر پانوراما پیچیده [ 29 ].]. برخلاف روشهای فوق، هدف ما انطباق تکنیکهای تعمیم نقشه کلاسیک با محیطهای داخلی است. بر اساس تجسم نقشه 3 بعدی نقشه داخلی، بسیاری از امکانات داخلی به عنوان POI انتزاع شده و نمایش چند مقیاسی آنها مورد مطالعه قرار می گیرد. POI ها به ویژه برای نقشه ها مهم هستند زیرا مکان هایی را نشان می دهند که کاربران ممکن است مفید یا جالب بدانند و بنابراین منبع اصلی اطلاعات برای کاربران هستند [ 30 ]. کار موجود در زمینه تعمیم نقشه و تجسم POI چند مقیاسی در محیط های بیرونی گسترده و به خوبی مستند شده است [ 31 ، 32]، اما استراتژی های مربوطه را نمی توان به راحتی در محیط های داخلی اعمال کرد. برای نقشه های داخلی، نمایش چند مقیاسی و تعمیم نقشه سوالات جدیدی هستند. در مقایسه با نقشههای سنتی، نقشههای داخلی نقشههایی در مقیاس بزرگتر با نمایشهای دقیق و معمولاً سه بعدی هستند. نمایشهای LOD نقشههای داخلی محتویات و اشکال غنیتری دارند و جزئیات بیشتری را در سطوح مختلف ثبت میکنند.
در این مقاله، ما یک رویکرد خود انطباقی را برای تجسم POI در نقشههای داخلی برای دستیابی به تجسم چند مقیاسی و شخصی اعمال میکنیم. ما یک نقشه داخلی سه بعدی با تمام طبقات به صورت عمودی بر روی نقشه پایه فضای باز ایجاد می کنیم تا به کاربران امکان دهد کل ساختمان را از یک نقشه درک کنند. به عنوان پسزمینه نقشه داخلی، چندین LOD ساختار ساختمان که میتوانند سطوح مختلف اطلاعات را منتقل کنند، بر اساس سطوح مختلف تقسیم عملکردی تعریف میشوند. به عنوان پیش زمینه نقشه داخلی، داده های POI به روشی چند مقیاسی برای توصیف سطوح مختلف اطلاعات معنایی تجسم می شوند. علاوه بر این، داده های POI و نمادهای نمایش داده شده می توانند با توجه به نیازهای کاربر تغییر کنند تا نیازهای شخصی را برآورده کنند.
2. مواد و روشها
2.1. داده های نقشه داخلی
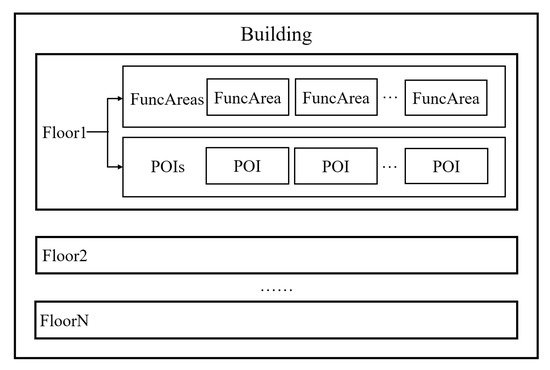
در این تحقیق از یک مرکز خرید به نام هان استریت واندا پلازا در شهر ووهان چین به عنوان نمونه برای معرفی فرآیند تهیه نقشه استفاده شده است. داده های نقشه داخلی از پلان طبقه دوبعدی دیجیتالی شده و سپس به صورت سلسله مراتبی مطابق با ساختار واقعی ساختمان سازماندهی می شوند، همانطور که در شکل 1 نشان داده شده است.. یک فایل اصلی JSON (جاوا اسکریپت Object Notation) برای ذخیره اطلاعات کلی کل ساختمان و ارجاع به هر یک از طبقات ساختمان استفاده می شود. سپس هر طبقه در یک فایل GeoJSON توضیح داده میشود که حاوی اطلاعاتی در مورد خود طبقه و همچنین مجموعهای از مناطق کاربردی و POI است. مناطق عملکردی که ما در این مطالعه تعریف میکنیم شامل مناطقی مانند اتاقهای اصلی، مغازهها، پیشخوانها و مناطق تعمیمیافته است. آنها پس زمینه یک نقشه داخلی را تشکیل می دهند و ساختار ساختمان را منعکس می کنند. POI مکانهای نقطهای انتزاعی هستند که اطلاعاتی را در مورد امکانات خدماتی مورد علاقه کاربران ارائه میدهند، مانند مغازهها، توالتها و دستگاههای خودپرداز در یک مرکز خرید، و پیشزمینه یک نقشه داخلی را تشکیل میدهند.
2.2. تجسم نقشه سه بعدی داخلی
تجسم نقشه های داخلی نیازمند استراتژی های تجسم متفاوتی نسبت به نقشه های فضای باز است [ 33]. تفاوت های زیادی بین فضاهای داخلی و فضاهای بیرونی وجود دارد که ممکن است بر نحوه تجسم آنها تأثیر بگذارد. اولاً، فضاهای داخلی بر خلاف وسعت فضایی نامحدود و بزرگ فضای باز، اندازه محدود و وسعت فضایی کمی دارند. از آنجایی که مقیاس نقشه بسیار بزرگتر است، ویژگی ها و جزئیات ریزتر باید با دقت داده های بالاتری در نقشه داخلی نمایش داده شوند. دوم، فضاهای داخلی سطوح پیچیدگی بیشتری دارند و تراکم اطلاعات مکانی و معنایی معمولاً بیشتر از فضاهای بیرونی است. در نتیجه، ممکن است لازم باشد برخی از ویژگی ها را حذف یا ساده کنید تا نقشه ساده و خوانا بماند. سوم، طراحی و برنامه ریزی فضاهای داخلی به طور کامل توسط انسان انجام می شود. از این رو، ساختار یک فضای داخلی سلسله مراتبی تر است و هندسه منظم تری نسبت به ساختار ویژگی های طبیعی بیرونی دارد. علاوه بر این، ادراک انسان از یک فضای داخلی تمایل به پیشرفت از کل به اجزاء یا از درشت تر به وضوح دارد. بنابراین، فضاهای داخلی باید به روشی چند مقیاسی تجسم شوند که با چنین شناخت انسانی همسو باشد. در نهایت، یک فضای داخلی معمولاً چند لایه است و یک تجسم سه بعدی میتواند نه تنها یک تصور بصری برای کاربران ایجاد کند، بلکه بینشی از ساختار عمودی ساختمان نیز ارائه میکند.
2.2.1. انتخاب ویژگی و طبقه بندی
برای کاهش بار شناختی پردازش نقشه داخلی، باید اطمینان حاصل کنیم که نقشه تا حد امکان دارای جزئیات اضافی باشد. اولین گام برای تجسم نقشه داخلی، انتخاب ویژگی است. تمام ویژگی های یک ساختمان را می توان به سازه ها و تاسیسات ساختمانی تقسیم کرد. اولی عناصر سازهای هستند که ساختمان را تشکیل میدهند و دومی قابلیتهایی را به ساختمان اضافه میکنند [ 28]. با استفاده از مرکز خریدی که در بالا به عنوان مثال ذکر شد، برای ساختار ساختمان، طرح کلی ساختمان، خطوط زمین و خطوط کلی اتاق را به عنوان ویژگی انتخاب کردیم. بسیاری از ویژگیهای ساختاری که مشتریان هنگام بازدید از یک مرکز خرید به آنها علاقه ندارند، حذف شدند، مانند درها و پنجرههای هر اتاق و نردهها، ستونها و لولهها. برای امکانات، ما فقط ویژگی هایی را انتخاب کردیم که بیشترین ارتباط را با رفتار خرید داشتند، که سپس به سه دسته طبقه بندی می شوند. فروشگاه ها بیشترین علاقه را برای کاربران دارند، بنابراین نقشه داخلی یک مرکز خرید باید روی آنها تمرکز کند. ویژگی های حمل و نقل، از جمله پله ها، پله برقی، آسانسور، ورودی و خروجی نیز انتخاب شدند. این ویژگی ها نقش کلیدی در شناخت کاربران از محیط های داخلی چند طبقه ایفا می کنند زیرا به کاربران کمک می کنند طبقات مختلف را در نقشه ذهنی خود به هم متصل کنند. امکانات خدمات عمومی مانند توالت ها، مکان های استراحت و دستگاه های خودپرداز نیز انتخاب شدند زیرا ممکن است اهدافی باشند که کاربران هنگام خرید به دنبال آن باشند، اگرچه اهمیت کمتری نسبت به ویژگی های دو دسته قبلی دارند. این امکانات، POIهایی هستند که در این مطالعه در نظر می گیریم. آنها با نمادهای POI تجسم می شوند. در مقابل، تجهیزات و مبلمان که اهمیت کمتری برای رفتار خرید دارند، در نقشه داخلی نشان داده نمی شوند. نتایج دقیق انتخاب ویژگی و طبقه بندی در نشان داده شده است آنها با نمادهای POI تجسم می شوند. در مقابل، تجهیزات و مبلمان که اهمیت کمتری برای رفتار خرید دارند، در نقشه داخلی نشان داده نمی شوند. نتایج دقیق انتخاب ویژگی و طبقه بندی در نشان داده شده است آنها با نمادهای POI تجسم می شوند. در مقابل، تجهیزات و مبلمان که اهمیت کمتری برای رفتار خرید دارند، در نقشه داخلی نشان داده نمی شوند. نتایج دقیق انتخاب ویژگی و طبقه بندی در نشان داده شده استجدول 1 .
2.2.2. مدل سازی و تعمیم داده های چند مقیاسی
از دیدگاه سازماندهی داده ها، دو راه اصلی برای دستیابی به نمایش چند مقیاسی داده های مکانی در یک نقشه آنلاین وجود دارد. راه اول این است که چندین نسخه از داده ها را در مقیاس های مختلف از قبل از طریق تعمیم آفلاین آماده کنید و سپس نسخه مورد نظر را در زمان واقعی بر اساس مقیاس نقشه فراخوانی کنید. این رویکرد می تواند الزامات عملکرد زمان واقعی را برای حجم بیشتری از داده ها برآورده کند و برای داده هایی که اغلب به روز نمی شوند مناسب تر است. این مورد برای ویژگی های ساختار ساختمان ارائه شده در نقشه های داخلی است. راه دوم تعمیم داده های اصلی به صورت آنلاین و بازگرداندن داده های تعمیم یافته مورد نیاز برای نمای نقشه فعلی در زمان واقعی است. داده هایی با اندازه کوچکتر، مانند ویژگی های POI که روی نقشه داخلی نشان داده می شوند، می توان به این روش تعمیم داد تا تعامل کاربر را بدون قربانی کردن عملکرد بلادرنگ تسهیل کند. همانطور که در نشان داده شده استشکل 2، ما از پلان طبقه 2 بعدی ساختمان مورد نظر به عنوان منبع داده برای ایجاد داده های نقشه داخلی در مقیاس چندگانه استفاده می کنیم. پس از انتخاب ویژگی و طبقه بندی، ساختار ساختمان را به لایه های چند ضلعی دیجیتالی می کنیم که به عنوان پس زمینه نقشه عمل می کنند و تعمیم آفلاین را انجام می دهیم. در مقابل، POI ها (در مثال ارائه شده در اینجا، امکانات حمل و نقل، امکانات خدمات عمومی، و مغازه ها) به نقاط منفرد ساده شده اند تا به عنوان اطلاعات پیش زمینه نقشه ارائه شوند، و فرآیند تعمیم آنلاین برای این داده ها اعمال خواهد شد. در طول دیجیتالی کردن، نسخههای متعددی از دادههای چند ضلعی پسزمینه که محیط داخلی را در سطوح مختلف نشان میدهند، از قبل آماده میشوند. هنگامی که کاربران بزرگنمایی یا کوچکنمایی می کنند، داده های مناسب برای سطح بزرگنمایی فعلی نشان داده می شود. متقابلا،
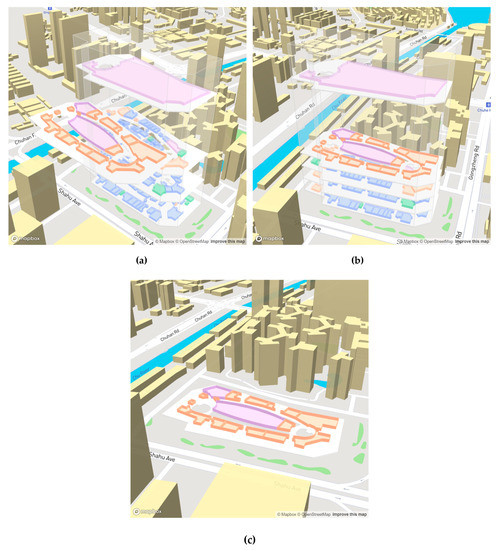
برای ساختار ساختمان، ما چهار سطح از جزئیات را پیشنهاد میکنیم که از طرح کلی ساختمان تا توزیع دقیق اتاق پیش میرود، همانطور که در جدول 2 خلاصه شده است، مطابق با پارتیشن بندی عملکردی فضای داخلی. تجسم دو بعدی ساده از داده های اصلی چند مقیاسی برای یکی از طبقات در شکل 3 نشان داده شده است.. این نمایش های چند مقیاسی را می توان به عنوان درون یابی نمایش های CityGML LOD در نظر گرفت. CityGML پنج LOD را برای ساختمان ها از پیش تعریف می کند، اما فقط جزئی ترین سطح شامل محتوای داخلی است، در حالی که در سطوح دیگر، فضای داخلی ساختمان ها خالی می ماند. در روش ما، از LOD3 به LOD2 و بیشتر به LOD1، ما به تدریج چند ضلعی های همسایه را جمع می کنیم و اشکال چند ضلعی را ساده می کنیم. چند ضلعی های کوچکی که در مقیاس های کوچکتر نقشه به وضوح دیده نمی شوند حذف می شوند یا با چند ضلعی های همسایه ادغام می شوند. در این فرآیند، تفاوت های عملکردی بین چند ضلعی ها در نظر گرفته می شود. چند ضلعی هایی که عملکرد یکسانی دارند به احتمال زیاد برای نشان دادن تقسیم بندی عملکردی فضای داخلی ادغام می شوند. برای این منظور می توان از خوشه بندی فضایی استفاده کرد [ 34 , 35 ,36 ]. سادهسازی خط همچنین میتواند برای مرزهای چند ضلعی اعمال شود تا بازنماییهای مختلف به دست آید [ 37 ، 38 ]. نفوذها و اکستروژن های کوچک در اشکال چند ضلعی ساده شده است. در مقایسه با ویژگیهای طبیعی فضای باز، ویژگیهای داخلی مصنوعی هندسه منظمتری دارند و روشهای سادهسازی سنتی که با موفقیت در محیطهای بیرونی مورد استفاده قرار میگیرند هنوز هم قابل استفاده هستند. برای تسهیلات نشان داده شده با نمادهای POI، فرآیند تعمیم مربوطه در بخش 2.3.2 توضیح داده شده است .
2.2.3. تجسم سه بعدی
ما از تجسم سه بعدی غیر عکاسی برای به دست آوردن یک نمایش انتزاعی از محیط داخلی استفاده می کنیم. این به این دلیل است که معانی و عملکرد ویژگی های داخلی مهمتر از ظاهر واقعی آنها است. ویژگیهای اصلی دوبعدی در جعبههای مرزبندی سه بعدی اکسترود شدهاند. این ویژگی ها شامل طرح کلی ساختمان، خطوط کلی کف، و انواع مختلف مناطق کاربردی در هر طبقه است و ارتفاع اکستروژن و رنگ آنها به طور متفاوت تنظیم شده است، همانطور که در شکل 4 نشان داده شده است.. به طور خاص تر، ما طرح کلی ساختمان را بر اساس ارتفاع ساختمان اکسترود می کنیم و از یک رنگ روشن و شفاف برای نشان دادن مرز ساختمان استفاده می کنیم تا اطمینان حاصل شود که فضای داخلی ساختمان همچنان به وضوح دیده می شود. در داخل ساختمان، خطوط کلی تمام طبقات نیز با استفاده از ارتفاع کمتر اکسترود شده و به صورت عمودی روی هم چیده شده اند تا چندین طبقه در یک نقشه نمایش داده شوند. همانطور که در شکل 5 الف نشان داده شده است، برای برجسته کردن یک طبقه خاص، موقعیت افقی آن را می توان به روشی شبیه به باز کردن یک کشو تغییر داد . به طور مشابه، موقعیت های عمودی چندین طبقه را می توان تغییر داد تا فضایی برای یک طبقه خاص ایجاد شود تا واضح تر دیده شود، همانطور که در شکل 5 ب نشان داده شده است. همچنین مانند اکثر برنامه های نقشه داخلی، همانطور که در نشان داده شده است، فقط یک طبقه نمایش داده می شودشکل 5 ج. در هر طبقه، نواحی عملکردی تعمیم یافته در مرحله قبل مطابق با سطوح مربوط به جزئیات اکسترود می شوند. به عنوان مثال، در مقیاس کوچکتر، نقشه تنها مناطق عملکردی کلی با ارتفاعات نسبتاً کم را نشان می دهد، همانطور که در شکل 4 ب نشان داده شده است، که نقشه را انتزاعی تر و دو بعدی می کند. همانطور که در شکل 4 d نشان داده شده است، در مقیاس بزرگتر، اتاقها با دیوارها نشان داده میشوند تا نمایش دقیقتری نسبت به جعبههای مرزبندی سه بعدی به دست آورند . هر نوع منطقه کاربردی دارای رنگ منحصر به فردی است که کنتراست واضحی را ایجاد می کند و دیدن راهروها را آسان تر می کند. نقشه های داخلی در یک نقشه پایه سه بعدی در فضای باز ادغام شده اند. وقتی نقشه به اندازه کافی بزرگنمایی شد، میتوان برخی از ساختمانهای سه بعدی را با نقشههای سه بعدی داخلی جایگزین کرد.
2.3. تجسم POI داخلی
در بخش قبل، تجسم نقشه سه بعدی داخلی که عمدتاً ویژگی های ساختاری یک ساختمان را به تصویر می کشد، مورد بحث قرار گرفت. بر اساس چنین نقشه ای، POI ها نیز باید تجسم شوند تا عملکرد امکانات را منعکس کنند و اطلاعات معنایی بیشتری را اضافه کنند. POI در نقشه های داخلی با نقشه های بیرونی متفاوت است. اولاً، برخلاف بسیاری از POIهای فضای باز، یک POI داخلی در طبقه خاصی از یک ساختمان قرار دارد و دسترسی به آن نسبت به یک POI در یک فضای باز در فضای باز دشوارتر است. دوم، انواع مختلف فضاهای داخلی دارای اهداف خاصی هستند که نمادهای POI در نقشه های داخلی در مقیاس بزرگ باید بیان کنند. در مقایسه با حجم زیادی از داده های POI در انواع مختلف که در فضای باز یافت می شوند، نقشه داخلی یک ساختمان خاص معمولاً عملکردهای متمرکزتری را نشان می دهد و دارای دسته بندی های POI کمتری نسبت به نقشه های فضای باز است. POI ها در یک نقشه داخلی اغلب با اطلاعات مشترک خدمات دقیق مرتبط هستند که کاربران به آن علاقه مند هستند و نمادهای POI می توانند آن ها را تجسم کنند، مانند رتبه بندی کاربران فروشگاه ها در یک مرکز خرید یا محبوبیت هر سالن نمایشگاهی در یک موزه. سوم، وسعت فضایی فضای داخلی بسیار کوچک است، اما تعداد زیادی POI در یک ساختمان واحد وجود دارد. بنابراین، چگالی POI های داخلی بسیار بیشتر از POI ها در یک فضای بیرونی وسیع است. با توجه به تفاوت های فوق، تجسم POI های داخلی باید متفاوت از POI های بیرون باشد. به عنوان مثال، نقشه شهر معمولاً مکان و اطلاعات ویژگی های اساسی هر POI را به تصویر می کشد. با استفاده از نمادهای حباب برای توصیف اطلاعات دسته. با این حال، در نقشههای داخلی در مقیاس بزرگتر، برای هر POI، نشان دادن مکان سه بعدی (سطح، طول و عرض جغرافیایی)، مسیر دسترسی و برخی اطلاعات دقیق خدمات ضروری است.
2.3.1. طبقه بندی POI سلسله مراتبی
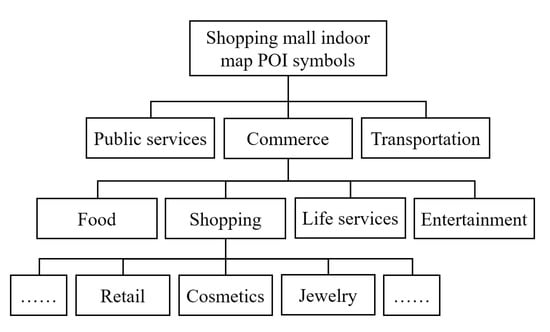
اولین مرحله تجسم POI طبقه بندی سلسله مراتبی است که پایه و اساس نمایش چند مقیاسی POI را می گذارد. برخی از سیستمهای طبقهبندی قبلاً برای POIهای فضای باز [ 39 ] توسعه یافتهاند، اما نمیتوان آنها را مستقیماً برای طبقهبندی POIهای داخلی به کار برد. POI ها در نقشه های داخلی معمولاً دارای موضوعات مجزا هستند و به دسته های کمتری تعلق دارند. نقشههای داخلی مختلف مضامین مختلفی را بیان میکنند، بنابراین یک سیستم طبقهبندی واحد برای همه آنها به سختی اعمال میشود. جدول 3 طبقه بندی مورد استفاده در این مقاله را برای مثال در نظر گرفته شده خیابان Han Wanda Plaza نشان می دهد. ما ابتدا تمام POI ها را به چهار کلاس اصلی طبقه بندی کردیم و سپس هر کلاس به چندین زیر کلاس طبقه بندی شد.
2.3.2. انتخاب POI تطبیقی
POI ها به طور متراکم در داخل یک ساختمان توزیع می شوند، اما دستگاه های نمایشگر معمولی اندازه صفحه نمایش محدودی دارند. برای جلوگیری از همپوشانی نمادهای POI با یکدیگر، نمادهای مناسب باید انتخاب شوند تا به صورت تطبیقی در مقیاس های بزرگنمایی مختلف ظاهر شوند. روش های زیادی برای کاهش بهم ریختگی تعداد زیادی از نقاط با حفظ الگوهای توزیع آنها پیشنهاد شده است [ 31 ]، اما از آنجایی که توزیع POI معمولاً در فضاهای داخلی یکنواخت تر از فضاهای بیرونی است، می توان از روش ساده تری استفاده کرد. مشابه مطالعه قبلی [ 40]، در روش ما، انتخاب نماد سبک وزن در سمت مشتری انجام می شود تا به تجسم POI تطبیقی در نقشه های داخلی برای کاربران مختلف دست یابد. اولین قدم این است که اولویت هر POI را تعیین کنید. نمادهای با اولویت بالاتر به احتمال زیاد زمانی که نقشه کوچکنمایی میشود، حفظ میشوند. اولویت یک POI به دو عامل بستگی دارد: اندازه اتاق یا منطقه کاربردی مربوطه و علاقه کاربر به آن POI. اولویت به شرح زیر تعریف می شود:
جایی که پمن، اسمن، و منnتیمناولویت، اندازه، و سطح علاقه، به ترتیب، POI امین هستند. اسمترآایکسو منnتیمترآایکسبه ترتیب حداکثر اندازه و سطح علاقه هستند. و w1و w2وزنه هایی هستند که برای تعادل این دو عامل استفاده می شوند. اولین عبارت در این معادله نشان می دهد که POI های مربوط به مناطق بزرگتر به احتمال زیاد هنگام بزرگ نمایی نگهداری می شوند. عبارت دوم به روش انعطاف پذیری می دهد زیرا می تواند برای کاربران مختلف متفاوت باشد. به عنوان مثال، اگر هدف اصلی کاربر خرید باشد، می توان سطح علاقه بالاتری را برای POI هایی که به دسته خرید در سیستم طبقه بندی POI ذکر شده در بالا تعلق دارند، تعیین کرد. مرحله دوم، تشخیص تضاد بین نمادهای POI است. هنگامی که یک نماد بسیار نزدیک است یا با نماد دیگری همپوشانی دارد، نماد با اولویت کمتر حذف می شود.
2.3.3. طراحی نماد POI
همانطور که مقیاس نقشه تغییر می کند، نه تنها تعداد نمادهای POI می تواند تغییر کند، بلکه LOD های اطلاعات ویژگی نشان داده شده توسط خود نمادها نیز می توانند تغییر کنند. بر اساس طبقه بندی سلسله مراتبی POI، یک نماد متمایز برای هر کلاس اصلی و زیر کلاس طراحی شده است، همانطور که توسط ساختار درختی نشان داده شده در شکل 6 نشان داده شده است.. از گره های والد گرفته تا گره های فرزند، سطح معنایی جزئی تر می شود. نمادها در یک سطح خاص در ساختار درختی مطابق با مقیاس نقشه استفاده می شوند. در مقیاس کوچکتر، نمادهای کلاسهای اصلی توزیع کلی POI را در هر کلاس اصلی نشان میدهند. در مقیاس متوسط، از نمادهای زیر کلاسها برای نشان دادن اطلاعات دستهبندی دقیقتر استفاده میشود. علاوه بر اطلاعات دسته بندی، POI ها حاوی اطلاعات معنایی غنی هستند که کاربران ممکن است به آن علاقه مند شوند. به عنوان مثال، برای POI های غذایی، علاوه بر انواع مواد غذایی موجود در مرکز خرید، کاربران ممکن است نگران محدوده قیمت نیز باشند. ساعت، تعداد صندلیهای باقیمانده، رتبهبندی کاربران و سایر اطلاعات. در مقیاس بزرگتر، این اطلاعات معنایی دقیق تر را می توان بیان کرد، بنابراین یک مدل LOD معنایی، همانطور که درجدول 4 .
طراحی نمادهای POI باید با اصول زیر مطابقت داشته باشد. اول، آنها باید بتوانند به طور شهودی عملکردهای POI را بیان کنند تا کاربران بتوانند این نمادها را با ویژگی های جغرافیایی مربوطه مرتبط کنند. دوم، طراحی باید تا حد امکان ساده باشد. جزئیات بیش از حد یا اشکال پیچیده تشخیص نمادها را دشوار می کند. سوم، رنگهای آنها باید روشنتر از پسزمینه باشد تا اطمینان حاصل شود که روی نقشه نسبتاً برجسته هستند. این اصول طراحی کارتوگرافی برای ارائه نقشه های داخلی مهم هستند. هنگامی که چنین نقشه ای در یک دستگاه تلفن همراه نمایش داده می شود، به دلیل اندازه محدود منطقه نمایش، نمی توان یک افسانه ارائه داد. در نتیجه، توانایی انتقال اطلاعات معنایی با استفاده از نمادهای تصویری بصری بسیار مهم می شود. ساده نگه داشتن نمادها می تواند به خوانندگان کمک کند که آنها را بدون تلاش قابل توجه تفسیر کنند، به خصوص هنگام حرکت. برای پیش زمینه نقشه و ویژگی هایی که کاربران به آن علاقه دارند، استفاده از رنگی متمایز از پس زمینه می تواند به ایجاد سلسله مراتب بصری خوب کمک کند و توجه کاربر نقشه را به نمادها جلب کند. با هدایت اصول فوق و با اشاره به نمادهایی که معمولاً در نقشه های اینترنتی استفاده می شود، نمادهای POI برای کلاس ها و زیر کلاس های اصلی در مثال در نظر گرفته شده در اینجا همانطور که در نشان داده شده طراحی شده اند.شکل 7 . بر این اساس، اطلاعات خدمات دقیق تر برای یک POI را می توان با ترکیب این نمادهای اساسی با سایر متغیرهای بصری بیان کرد. برای مثال، از رنگ روشن می توان برای نشان دادن باز بودن POI استفاده کرد، در حالی که از رنگ تیره می توان برای نشان دادن بسته بودن POI استفاده کرد. همانطور که در شکل 8 نشان داده شده است، می توان یک نوار پیشرفت دایره ای در اطراف یک نماد اضافه کرد تا میانگین قیمت یک رستوران را بیان کند .
نمایش نمادهای POI باید نه تنها با مقیاس نقشه، بلکه برای کاربران خاص نیز سازگار باشد. نمادهای سبک ها، اندازه ها و طرح های رنگی مختلف باید برای کاربران گروه های سنی یا جنسیت های مختلف یا با اهداف مختلف برای استفاده از نقشه نشان داده شود. برای فعال کردن طراحی نماد نقشه تطبیقی، پارامترهای نماد نباید منحصر به فرد باشند، بلکه باید در محدوده معینی از مقادیر تغییر کنند تا به آنها اجازه دهد تا تحت هدایت قوانین خاصی با موقعیتهای مختلف سازگار شوند، همانطور که در جدول 5 خلاصه شده است.
3. نتایج
3.1. طراحی و عملکرد سیستم
در این مطالعه، یک سیستم نمونه اولیه نقشه داخلی به دنبال ایده های ارائه شده در بالا توسعه داده شد. این یک سیستم مبتنی بر وب است که بر روی مرورگرهای مدرن در رایانه های رومیزی یا دستگاه های تلفن همراه کار می کند. این سیستم از تکنیک WebGL برای رندر صحنه های سه بعدی داخلی بهره می برد و در مقایسه با سایر تکنیک های گرافیک سه بعدی مبتنی بر وب بدون استفاده از پلاگین، عملکرد قابل توجهی را افزایش می دهد. صحنههای داخلی مدلسازیشده بر روی نقشه شهر سهبعدی بر اساس Mapbox GL JS، که یک کتابخانه جاوا اسکریپت است که از WebGL نیز برای ارائه نقشههای تعاملی استفاده میکند، قرار گرفتند. برای ارزیابی عملکرد تعمیم و تجسم این سیستم، آزمایشی را در مرورگر کروم بر روی رایانه شخصی با مشخصات زیر انجام دادیم: یک پردازنده Intel Core i5-6200U @2.30 گیگاهرتز، 8 گیگابایت رم و یک پردازنده گرافیکی NVIDIA GeForce 930M. . هر بار که مقیاس نقشه تغییر می کند، تعمیم و نمایش بیدرنگ داده های POI پیش زمینه به طور متوسط 23.3 میلی ثانیه طول می کشد. مصرف زمان کم است زیرا روش ما سبک وزن است و مجموعه داده کوچک است. به طور خاص، 392 POI در ساختمان آزمایشی وجود دارد. برای ساختار ساختمان پسزمینه، دادهها در LODهای مختلف از قبل تعمیم داده شدند تا عملکرد بلادرنگ را تضمین کنند. برای رندر و تجسم، سیستم می تواند نرخ فریم تقریباً 40 فریم در ثانیه (FPS) را هنگام جابجایی یا زوم کردن و بزرگنمایی نقشه حفظ کند. حجم داده های نقشه داخلی این ساختمان آزمایشی 1.03 مگابایت است که برای انتقال داده در برنامه های تحت وب قابل قبول است.
3.2. نتایج تجربی و تجزیه و تحلیل
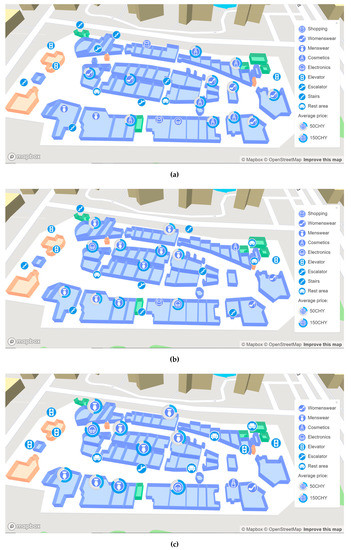
در ادامه، ویژگی های اصلی تجسم برنامه نقشه داخلی خود را از دو منظر ارائه خواهیم کرد: سازگاری مقیاس و سازگاری کاربر. شکل 9 نشان می دهد که چگونه نقشه داخلی ارائه شده با مقیاس نقشه تطبیق می یابد. قبل از زوم کردن بر روی ساختمانی که داده های نقشه داخلی برای آن در دسترس است، شکل های بیرونی و ارتفاع ساختمان ها در نقشه فضای باز پس زمینه به صورت سه بعدی نمایش داده می شود. هنگامی که نقشه برای اولین بار روی ساختمان مورد نظر بزرگنمایی می شود، یک نقشه داخلی با جزئیات کمی ظاهر می شود. شکل 9a توزیع کلی طبقات و نمادها را با اطلاعات دسته بندی کلی نشان می دهد. با کمک نمادهای POI میتوان دید که طبقات اول تا سوم این مرکز خرید عمدتاً به خرید اختصاص دارد، در حالی که طبقات چهارم و پنجم به ترتیب شامل رستورانها و امکانات تفریحی است. همانطور که در شکل 9 ب نشان داده شده است، همانطور که کاربر بیشتر بزرگنمایی می کند، نقشه داخلی فضاهای کاربردی در هر طبقه، مانند مجموعه ای از رستوران ها یا مغازه ها را نشان می دهد. همچنین نمادهای POI را نشان می دهد که اطلاعات دسته بندی دقیق را توصیف می کنند، مانند رستوران های فست فود یا مغازه های لباس. همانطور که در شکل 9 نشان داده شده است، همانطور که کاربر به بزرگنمایی ادامه می دهدج، نقشه داخلی توزیع دقیق اتاق را نشان می دهد و نمادهای POI نیز اطلاعات خدمات دقیق تری مانند میانگین قیمت مغازه ها در این مرکز خرید را ارائه می دهند. از طریق چنین تجسم چند مقیاسی از ساختار ساختمان و دادههای POI، نقشه داخلی میتواند اطلاعات چند سطحی در مورد فضای داخلی ساختمان در اختیار کاربران قرار دهد. سطح اطلاعاتی که کاربر نیاز دارد با مقیاس فعلی نقشه مرتبط است. الگوی توزیع کلی امکانات خدمات داخلی در داخل ساختمان، که در مقیاس های کوچکتر نقشه نمایش داده می شود، می تواند پشتیبانی تصمیم اولیه را برای کاربران در سطح کلان فراهم کند، در حالی که اطلاعات خدمات دقیق برای امکاناتی که در مقیاس های بزرگتر تجسم می شود، می تواند به جزئیات کمک کند. برنامه ریزی و تصمیم گیری نهایی در سطح خرد
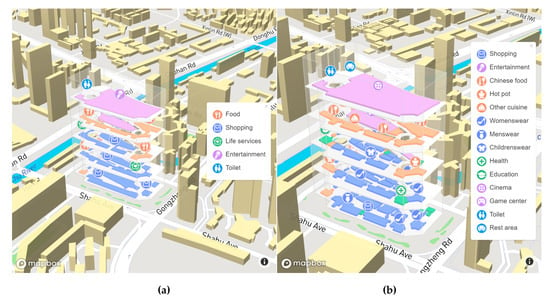
شکل 10 نمونه ای از نحوه تطبیق نقشه داخلی برای کاربران مختلف را نشان می دهد. هنگامی که کاربر ثبت نام می کند و به سیستم نقشه داخلی وارد می شود، می تواند اطلاعات شخصی مانند سن و جنسیت را وارد کند و آنچه را که به آن علاقه دارد انتخاب کند. بر اساس این اطلاعات، LOD محتوای نقشه به صورت تطبیقی است. برای کاربران مختلف تغییر کرده است. به عنوان مثال، شکل 10 a نسخه ای از نقشه را نشان می دهد که به یک زن جوان ارائه شده است که هدفش خرید لوازم آرایشی و لباس های زنانه است. نمادهای POI که مربوط به علایق مشخص شده هستند بیشتر نمایش داده می شوند و اطلاعات خدمات دقیق تری در ارتباط با این نمادها ارائه می شود. به طور مشابه، شکل 10b نسخه ای از نقشه را نشان می دهد که به مرد جوانی که علاقه مند به خرید لوازم الکترونیکی و لباس مردانه است ارائه می شود. بر این اساس، نمادهای POI برای لوازم الکترونیکی و لباس مردانه دارای اولویت نمایش بالاتری هستند و LOD معنایی آنها بالاتر است. سایر ویژگیهایی که برای این کاربران جالب نیستند با نمادهای POI سادهتر نشان داده میشوند. گروه سنی نیز عاملی برای تجسم POI تطبیقی است. اگر یک مرد مسن به جای یک مرد جوان نقشه را مشاهده می کند، حتی اگر هر دو مرد علایق یکسانی داشته باشند، ممکن است نمادهای نمایش داده شده کمی متفاوت باشند. به عنوان مثال، همانطور که در شکل 10 نشان داده شده استج نمادهای محل استراحت اولویت نمایش بیشتری دارند و آسانسورها با اولویت بیشتری نسبت به پله برقی و پله نمایش داده می شوند. علاوه بر این، با توجه به اینکه بینایی افراد مسن اغلب خیلی خوب نیست، اندازه نمادهای POI به طور پیش فرض کمی بزرگتر می شود. به این ترتیب، از طریق تجسم تطبیقی دادههای POI، نقشههای داخلی ارائهشده میتوانند اطلاعات شخصیسازی شده در مورد فضای داخلی ساختمان را در اختیار کاربران قرار دهند. علایق و هدف کاربر در استفاده از نقشه، مشخصه های اصلی و سطوح اطلاعاتی است که نقشه داخلی نشان می دهد. در یک نقشه داخلی با توزیع POI متراکم، اجتناب ناپذیر است که برخی از POI ها هنگام بزرگنمایی کاربر حذف شوند. با این حال، آن دسته از POIهایی که کاربر بیشتر به آنها علاقه مند است، حفظ می شوند و در LOD بالاتر نشان داده می شوند.
3.3. تحلیل مقایسه ای
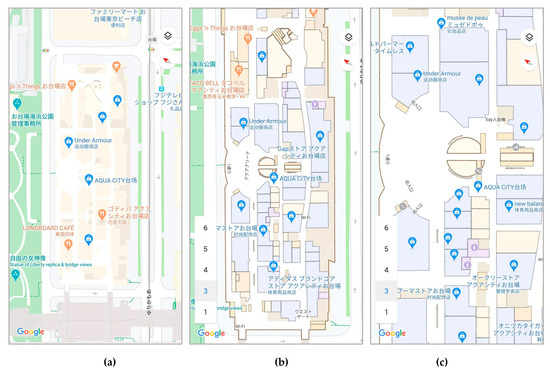
در مقایسه با برخی از روشهای رایج مدلسازی سهبعدی داخلی، مانند BIM، سیستم نقشه داخلی ارائهشده انتزاعیتر است و اطلاعات معنایی غنیتری را ضبط میکند. این به کاربر نقشه اجازه میدهد تا محیط داخلی را راحتتر درک کند و سطح پایینتر جزئیات نیز عملکرد تجسم را تسهیل میکند. در مقایسه، مدلهای BIM برای استفاده در زمان واقعی بسیار پیچیده هستند و حاوی عناصری هستند که باید حذف شوند تا مدلها برای تجسم مفید باشند [ 41 ]. برخی از خدمات نقشه اصلی مانند Google Maps بیشتر شبیه به سیستم نقشه داخلی ارائه شده هستند. چنین خدماتی همچنین اطلاعات را عمدتاً از طریق دادههای POI پیشزمینه، با توزیع اتاق به عنوان پسزمینه برای ارائه زمینه فضایی، منتقل میکنند. از نظر نمایش چند مقیاسی، همانطور که در نشان داده شده استشکل 11الف، سرویس Google Indoor Maps پس از بزرگنمایی نقشه در ساختمان مورد نظر، یک پسزمینه کلی را نیز نمایش میدهد، که مشابه رویکرد ما است. با این حال، در این نمایش، اتاق های متصل به سادگی بدون در نظر گرفتن عملکرد اتاق ها با هم ادغام می شوند. در مقابل، سیستم نقشه داخلی ما می تواند تقسیمات عملکردی داخل یک طبقه یا حتی بین طبقات را با کمک تجسم سه بعدی همه طبقات به طور همزمان منعکس کند. علاوه بر این، این نمایش پسزمینه تعمیمیافته فقط در نسخه تلفن همراه Google Maps وجود دارد. در نسخه وب، تمام اتاق ها و جزئیات آنها در هر سطح نشان داده شده است. این می تواند منجر به ارائه بسیاری از جزئیات ریز شود که تشخیص آنها در زمانی که نقشه در سطح بزرگنمایی نزدیکتر است دشوار است. در مورد نمایندگی POI، سطح اطلاعات معنایی نشان داده شده توسط نمادها با مقیاس نقشه در Google Indoor Maps تغییر نمی کند. همانطور که در نشان داده شده است، نمادهای POI می توانند تنها اطلاعات طبقه بندی نادرست را در هر سطح بزرگنمایی نشان دهندشکل 11 . در مقابل، زمانی که نقشه داخلی ما در مقیاس بزرگتری بزرگنمایی میشود، POI میتواند اطلاعات دستهبندی یا اطلاعات خدمات دقیقتری را نشان دهد. علاوه بر این، ما سازگاری کاربر را در نمایش چند مقیاسی ویژگیهای POI خود گنجاندهایم. به طور کلی، از نظر ارائه اطلاعات چند سطحی، سیستم نقشه داخلی ارائه شده در این مقاله برتر است.
4. بحث
با افزایش تعداد تسهیلات و خدماتی که در داخل ساختمان ها ارائه می شود، به طور فزاینده ای مهم می شود که بتوان POI های واقع در داخل ساختمان را بر روی نقشه های داخلی تجسم کرد. همانطور که نتایج تجسم ارائه شده در این مطالعه نشان میدهد، روش جدید پیشنهاد شده در اینجا اجازه میدهد تا نمادهای POI بیشتری در نقشههای داخلی در مقایسه با روشهای متداول تجسم نقشه شهر، که تمایل دارند POIهایی را که به لایههای مختلف در یک لایه تجسم میکنند، با وضوح بیشتری نشان دهند. منجر به مشکلات تراکم نمادها می شود. اگرچه امروزه بسیاری از برنامه های کاربردی موفق نقشه داخلی موجود است، پیاده سازی ما دارای چهار مزیت زیر است. اولین مزیت تجسم سه بعدی است. تجسم دوبعدی سنتی برای نقشه های داخلی مناسب نیست زیرا اجازه می دهد تنها یک طبقه از ساختمان نمایش داده شود. باعث می شود کاربران در یکپارچه سازی دانش در مورد طبقات مختلف مشکل داشته باشند. تجسم چندین طبقه در یک زمان از طریق تجسم سه بعدی می تواند درک فضایی را به شدت افزایش دهد [42]، اگرچه می تواند باعث شود برخی از محتویات یک طبقه توسط طبقات بالاتر پنهان شود. یک مصالحه ممکن ممکن است این باشد که اجازه دهیم یک طبقه با تغییر موقعیت افقی آن، به روشی مشابه باز کردن یک کشو، یا تغییر فاصله عمودی بین طبقات، برجسته شود. مزیت دوم نمایش چند مقیاسی است. تکنیک های تعمیم زیادی برای نقشه های فضای باز وجود دارد، اما نقشه های داخلی نیز به تعمیم نیاز دارند تا به کاربران در درک فضای داخلی ساختمان در سطوح مختلف کمک کنند. نقشه های داخلی در مقیاس های مختلف می توانند سطوح مختلف دانش و پشتیبانی تصمیم را از دیدگاه های مختلف به کاربران ارائه دهند. مانند نمایش نقشه، تصمیم گیری هنگام بازدید کاربر از یک ساختمان نیز از سطوح درشت تر به ریزتر انجام می شود که شامل تصمیمات اولیه و نقشه های دقیق می شود. که نقشه های داخلی چند مقیاسی می توانند به کاربران در ساختن آن کمک کنند. مزیت سوم، ارائه اطلاعات دقیق خدمات با استفاده از نمادهای POI است. همانطور که نقشههای داخلی در مقیاس بزرگ باید جزئیتر از نقشههای معمول شهر باشند، نمایشهای POI در نقشههای داخلی نیز باید جزئیات بیشتری داشته باشند. نمادهای POI سنتی فقط مکان و اطلاعات دسته بندی اولیه POI را نشان می دهند. روش معمول برای به دست آوردن اطلاعات دقیق تر خدمات این است که روی نماد کلیک کنید، که سپس یک کادر بازشو حاوی اطلاعات بیشتر را نشان می دهد [ نمادهای POI سنتی فقط مکان و اطلاعات دسته بندی اولیه POI را نشان می دهند. روش معمول برای به دست آوردن اطلاعات دقیق تر خدمات این است که روی نماد کلیک کنید، که سپس یک کادر بازشو حاوی اطلاعات بیشتر را نشان می دهد [ نمادهای POI سنتی فقط مکان و اطلاعات دسته بندی اولیه POI را نشان می دهند. روش معمول برای به دست آوردن اطلاعات دقیق تر خدمات این است که روی نماد کلیک کنید، که سپس یک کادر بازشو حاوی اطلاعات بیشتر را نشان می دهد [43 ]. در مقابل، نمادهای POI طراحی شده در این مطالعه می توانند به طور مستقیم برخی از اطلاعات خدمات دقیق را بدون نیاز به ورودی اضافی کاربر یا پنجره های بازشو جداگانه نمایش دهند، که ممکن است صفحه نمایش تلفن همراه برای نمایش به اندازه کافی بزرگ نباشد. مزیت چهارم خدمات نقشه شخصی سازی شده است. تراکم اطلاعات معمولاً در یک محیط داخلی بیشتر از یک محیط خارجی است. در این زمینه، مدلهای با وفاداری بالا که تمام جزئیات را تجسم میکنند، لزوما بهتر نیستند. در عوض، اطمینان از اینکه محتوای اطلاعاتی بهینه در نتایج تجسم ارائه میشود، مهمتر است [ 44]. برای دستیابی به این هدف، محتوای نقشه ارائه شده برای کاربران مختلف در سیستم توسعهیافته در این مطالعه تطبیق داده میشود و اطلاعات کاربر برای نمایش POIهای مناسب برای کاربران مختلف در نظر گرفته میشود.
دو محدودیت عمده برای این مطالعه وجود دارد که می توان در تحقیقات آینده به آنها پرداخت. ابتدا، این مطالعه از یک مرکز خرید به عنوان مثال برای نشان دادن روش نمایش چند مقیاسی پیشنهادی برای تجسم نقشه داخلی استفاده کرد، اما انواع دیگری از فضاهای داخلی وجود دارد که برای خدمات نقشه داخلی نیز جالب هستند، مانند موزه ها، فرودگاه ها، دفتر. ساختمان ها و پارکینگ های سرپوشیده این روش را می توان در این فضاهای داخلی نیز اعمال کرد اما برای این منظور نیاز به پیاده سازی های متفاوتی دارد. نمایش چند مقیاسی برای اکثر ساختمان ها مناسب است، اما از آنجا که عملکرد انواع مختلف ساختمان ها متفاوت است، نمادهای POI مختلف نیز باید برای ارائه اطلاعات خدمات مختلف طراحی شوند. دوم، یک مدل خودسازگار پیچیدهتر باید ایجاد شود. علاوه بر مقیاس نقشه و اطلاعات اولیه کاربر، بهتر است عوامل دیگری مانند محیط نمایش و توانایی شناختی کاربر را نیز در نظر بگیرید، اگرچه این به قیمت پیچیدگی بیشتر خواهد بود. علاوه بر این، در اجرای فعلی ما، تغییرات در محتوای نقشه و فرم بصری به صراحت از طریق تعامل کاربر ایجاد می شود تا اطمینان حاصل شود که می تواند خدمات دقیقی را به کاربران ارائه دهد. با این حال، ترجیح داده می شود که این تغییرات به طور خودکار و ضمنی ایجاد شوند. تغییرات در محتوای نقشه و فرم بصری به صراحت از طریق تعامل کاربر ایجاد می شود تا اطمینان حاصل شود که می تواند خدمات دقیقی را به کاربران ارائه دهد. با این حال، ترجیح داده می شود که این تغییرات به طور خودکار و ضمنی ایجاد شوند. تغییرات در محتوای نقشه و فرم بصری به صراحت از طریق تعامل کاربر ایجاد می شود تا اطمینان حاصل شود که می تواند خدمات دقیقی را به کاربران ارائه دهد. با این حال، ترجیح داده می شود که این تغییرات به طور خودکار و ضمنی ایجاد شوند.
5. نتیجه گیری ها
نقشه های داخلی به عنوان پایه و اساس و حامل اطلاعات خدمات مکان یابی داخلی عمل می کنند. بنابراین، مهم است که بتوانیم مفیدترین اطلاعات ممکن را از طریق نقشه های داخلی به کاربران ارائه دهیم. POI می تواند انواع امکانات خدماتی را توصیف کند و بنابراین اطلاعات مهمی را که توسط نقشه ها منتقل می شود را نشان می دهد. برای تجسم بهتر POI ها بر روی نقشه های داخلی، این مقاله تعمیم نقشه، یک تکنیک کلاسیک نقشه برداری، را به محیط های داخلی تطبیق داده و گسترش داده است. ما یک سیستم نقشه سه بعدی داخلی ایجاد کرده ایم که تمام طبقات یک ساختمان را در یک نمای نقشه ارائه می کند. به عنوان پسزمینه نقشه داخلی، اطلاعات ساختار ساختمان در یک LOD ارائه میشود که به طور تطبیقی با مقیاس نقشه تغییر میکند. به طور مشابه، به عنوان اطلاعات پیش زمینه، تعداد نمادهای POI و سطح اطلاعات مشخصه ای که نشان می دهند به صورت تطبیقی تنظیم می شوند. علاوه بر این، نمایش نمادهای POI را می توان برای کاربران مختلف تطبیق داد. در آینده، برای بهبود قابلیت استفاده از سیستم نمونه اولیه توسعه یافته ما، مدل خود تطبیقی ارائه شده نیاز به بهبود بیشتری دارد. انواع دیگر فضاهای داخلی مانند موزه ها، فرودگاه ها، ساختمان های اداری و پارکینگ های سرپوشیده باید در نظر گرفته شوند که بسیاری از آنها نیازمند توسعه نمادهای کارتوگرافی منحصر به فرد هستند.










بدون دیدگاه