

خلاصه
دسترسی و استفاده از سیستم جهانی ناوبری ماهواره ای (GNSS) شبه برد و اندازه گیری فاز حامل دستگاه های تلفن همراه به عنوان گوشی های هوشمند و تبلت با سیستم عامل اندروید، مفهوم موقعیت یابی دقیق با دستگاه های تلفن همراه را تغییر داده است. در این کار، مقایسه عملکردهای موقعیتیابی بهدستآمده با یک گوشی هوشمند و یک گیرنده GNSS بازار انبوه خارجی هم در زمان واقعی و هم پس از پردازش انجام میشود. همچنین توجه ویژه ای به دقت و دقت نتایج موقعیت یابی شده است، همچنین امکان تخمین ابهامات فاز به عنوان مقادیر صحیح (موقعیت یابی ثابت) که هنوز برای دستگاه های بازار انبوه چالش برانگیز است، تجزیه و تحلیل می شود. دقت و دقت به دست آمده با گیرنده بازار انبوه حدود 5 سانتی متر و 1 سانتی متر برای راه حل های زمان واقعی و پس از پردازش بود.
کلید واژه ها:
موقعیت یابی گوشی هوشمند ؛ GNSS _ اندروید ؛ اندازه گیری های خام
1. معرفی
امروزه فناوری گوشی های هوشمند بسیار فراگیر شده است. تقریباً همه یکی دارند. این نه تنها برای تماس، بلکه برای پیمایش به مقصد و گاهی اوقات برای به اشتراک گذاشتن موقعیت مکانی آنها استفاده می شود. بنابراین، سیستم های ناوبری به بخش مهمی از زندگی روزمره تبدیل شده اند.
در غیاب سیگنالهای سیستم ناوبری ماهوارهای جهانی (GNSS) یا در هر موقعیتی که سیگنال مختل یا محافظت شده باشد، مانند یک دره شهری یا تا حدی در داخل خانه [ 1 ]، سایر حسگرهای تعبیهشده در دستگاههای تلفن هوشمند اطلاعات قابل اعتمادی را برای انجام ناوبری و موقعیتیابی ارائه میکنند. [ 2 ].
برای ابداع یک راهحل موفق ناوبری در فضای باز، درک کیفیت و دقت حسگرهای یکپارچه تلفنهای هوشمند مهم است [ 3 ]. استفاده از گوشی های هوشمند می تواند دقت خوبی را با استفاده از سیستم های کمکی GNSS (A-GNSS) ارائه دهد، که می تواند داده های مورد نیاز را از سایر ایستگاه های دائمی GNSS یا از یک سرور متصل به اینترنت دریافت کند [ 4 ]. در هر دو مورد، دسترسی به اندازهگیریهای خام GNSS، بهعنوان محدودههای شبه و فاز حامل، الزامی است.
به طور معمول، هر تلفن هوشمند مدرن دارای یک گیرنده GNSS داخلی است و از سال 2017، امکان داشتن داده های خام GNSS توسط پلت فرم تلفن همراه وجود دارد. به همین ترتیب رابط برنامهنویسی برنامهنویسی سطح بالا (API)، بنابراین به این معنی است که میتوان اندازهگیریهای خام را از گیرندههای GNSS برای انجام موقعیتیابی دقیق (همچنین با استفاده از یک چیپست فرکانس تک) دریافت کرد.
بنابراین، با ظهور سیستم عامل اندروید نوقا (نسخه 7.x یا 8.x)، برخی از دستگاههای هوشمند امکان دسترسی مستقیم به دادههای خام و راهحل PVT (زمان سرعت موقعیت) را با بدست آوردن دامنههای شبه و فاز حامل از چیپست داخل [ 5 ، 6]. بسیاری از سنسورهای دیگر امروزه در گوشی های هوشمند در دسترس هستند. بیشتر آنها به کاربردهای داخلی (مانند حسگر مجاورتی، حسگرهای نور) مربوط می شوند، در حالی که سایرین (مانند واحد اندازه گیری اینرسی و دوربین) را می توان برای تخمین راه حل موقعیت یابی استفاده کرد، اما این جنبه ها خارج از محدوده این مقاله هستند. امکان ذخیره و ارائه مشاهدات خام مستقیماً از API سیستم عامل اندروید، گوشی های هوشمند را به ابزارهای بسیار جالبی برای موقعیت یابی در یک سری از زمینه ها تبدیل می کند که نیازی به عملکرد گیرنده ژئودتیک ندارند. کاربردهای مرتبط در آگهیهای بازرگانی عبارتند از: تشخیص محصول، صورتحساب مبتنی بر مکان، تبلیغات مبتنی بر مکان و اعلان مبتنی بر مجاورت. در اجرای قانون، برنامه های کاربردی جالب عبارتند از جستجو و نجات، geofencing، بازیابی صحنه جرم و غیره. زمینه های دیگر سیستم های حمل و نقل هوشمند است، مراقبت های بهداشتی، موزه، نظارت بر محیط زیست، و آموزش. در این مورد آخر، گسترش این دستگاهها، همراه با دسترسی آسان به سطح API مورد نیاز برای ذخیره دادههای GNSS، میتواند به مربیان اجازه دهد تا به راحتی روشهای آموزشی را تنظیم کنند و دانش را در زمینه موقعیتیابی به اشتراک بگذارند.7 ].
مطالعات زیادی قبلاً در رابطه با راه حل های موقعیت یابی [ 8 ، 9 ]، با در نظر گرفتن چیپست GPS/GNSS انجام شده است و یک کارگروه اروپایی در سال های اخیر فعال شده است ( https://www.gsa.europa.eu/gnss-raw-measurements -گروه ویژه ).
با این حال، این مقاله عملکرد دو گوشی هوشمند (Huawei P10+ و Samsung Galaxy S8+) با سیستم عامل اندروید را در مقایسه با مواردی که با یک گیرنده GNSS بازار انبوه دیگر (u-blox NEO M8T) با ویژگیهای مشابه گوشیهای هوشمند قابل دستیابی است، ارائه میکند. مجهز به آنتن پچ
برای رسیدن به هدفی که قبلاً توضیح داده شد، نویسندگان آزمایشهای زیادی را در فضای باز انجام دادهاند، با در نظر گرفتن دو رویکرد موقعیتیابی اصلی (ایستا و سینماتیک) تحت شرایط مختلف از نظر اثرات چند مسیری و تعداد ماهوارههای قابل مشاهده. برای مستقل کردن نتایج بهدستآمده توسط الگوریتمهای پردازش، از نرمافزارهای مختلفی برای بهدست آوردن راهحلهای موقعیتیابی پس پردازش شده استفاده شده است. مقاله به شرح زیر سازماندهی شده است: پس از این مقدمه، بخشی مربوط به تکنیک های موقعیت یابی GNSS موجود با فناوری تلفن هوشمند ارائه شده است. سپس موارد آزمون و نتایج به دست آمده قبل از اظهار نظر و نتیجه گیری نشان داده می شود.
2. تکنیک موقعیت یابی GNSS با گوشی های هوشمند
تنها با اندازه گیری فواصل (شبه گستره) بین گیرنده کاربر و موقعیت حداقل چهار ماهواره از یک صورت فلکی، می توان یک راه حل GNSS به دست آورد [ 10 ، 11 ].]. اگر فرستنده و ساعت گیرنده کاملاً هماهنگ باشند، فاصله بین گیرنده و ماهواره متناسب با زمان انتشار سیگنال است. همانطور که به طور گسترده شناخته شده است، اگر این شرط برآورده نشد، باید بایاس ساعت ماهواره ها و گیرنده ها تخمین زده شود. علاوه بر این، بایاسهای دیگر بر سیگنالهای GNSS تأثیر میگذارند، مانند نویز حرارتی، بایاسهای جبراننشده، چند مسیری و سایر اثرات انتشار. با این وجود، منبع خطای اصلی توسط دو اثر انتشار اتمسفر به دست میآید: تأخیرهای یونوسفر و تروپوسفر و گاهی سوسوزنهای یونوسفر (فقط در شرایط خاص). اگر این سوگیری ها را برآورد یا حذف نکنید، خطای موقعیت یابی می تواند بیشتر از 30 متر باشد و موقعیت یابی GNSS را برای اکثر برنامه ها بی فایده می کند. برای حل این مسائل می توان یکی از این دو رویکرد اصلی را اتخاذ کرد. همانطور که به طور گسترده در ادبیات توضیح داده شده است: تکنیک های پس پردازش یا زمان واقعی. این روش آخر زمانی قابل استفاده است که دقت مورد نیاز حداقل 5 سانتی متر باشد [12 ]، شرایطی که به طور کلی نمی توان آن را ارضا کرد و به خصوص با در نظر گرفتن دستگاه های هوشمند، مانند گوشی های هوشمند یا تبلت ها [ 13 ، 14 ] به دست آمد.
اگر سطح دقت قبلی کافی نیست یا نمی توان برخی از سوگیری ها را در زمان واقعی به روشی دقیق تخمین زد، رویکرد پس پردازش تنها روشی است که امکان دستیابی به عملکرد بهتر را فراهم می کند، مثلاً از استفاده استفاده می کند. از دو یا چند فرکانس، مانند گیرنده های ژئودتیکی یا دستی [ 15 ]. استفاده از این نوع دستگاه ها واقعاً گران بود و تنها مؤسسات تحقیقاتی و تعداد کمی از شرکت های خصوصی قادر به خرید و استفاده از آنها بودند. اما از دهه گذشته با ظهور گیرندههای بازار انبوه، موقعیتیابی GNSS رایجتر شده است زیرا هزینه گیرندهها و آنتنهای GNSS به چند دلار آمریکا کاهش یافته است و بسیاری از برنامههای منبع باز باعث افزایش انتشار این دستگاهها شده است. تکنیک.
اکثر گیرنده های GNSS موجود در گوشی های هوشمند فقط گیرنده های تک فرکانس (و نه چند فرکانس [ 16 ]) هستند، بنابراین تمام اندازه گیری های جمع آوری شده به فرکانس L1 (باند L1) ارجاع داده می شود. در این مورد، نمیتوان نه رایجترین روشهای تفاضل، که بهعنوان تفاوتهای دوگانه یا سهگانه نیز شناخته میشوند، به کار برد [ 12 ، 15 ]، و نه ترکیب مشاهدات مختلف [ 17 ]. بنابراین، تنها دو راهحل ممکن با رویکرد تفاوت واحد (با در نظر گرفتن یک گیرنده و یک ماهواره مرجع) یا مدلسازی بیشتر بایاسهای GNSS (به عنوان مثال، تأخیرهای یونوسفر و تروپوسفر، رانشهای ساعت ماهواره و گیرنده) با استفاده از مدلهای ریاضی ارائه میشوند [ 18 ]. ].
3. مواد و روشها
همانطور که در بخش مقدمه توضیح داده شد، بسیاری از آزمایشات مختلف در شرایط استاتیک و سینماتیک انجام شد. در این آزمایشها از دو گوشی هوشمند مختلف Huawei P10+ و Samsung Galaxy S8+ استفاده شده است. ویژگی های اصلی آنها در جدول 1 خلاصه شده است ، و همچنین ویژگی های گیرنده u-blox NEO M8T GNSS، که به عنوان یک سیستم مقایسه (مرجع) استفاده می شود.
برای تعمیم نتایج از نظر شرایط محیطی، دو سایت آزمایشی مختلف مورد بررسی قرار گرفت: اولین سایت آزمایشی یکی از روفها در Politecnico di Torino (ایتالیا) بود، منطقهای که نویز و اثرات چند مسیری بسیار زیاد است و دید ماهوارهای. به دلیل وجود ساختمان های دیگر کاهش می یابد. مورد دوم یک سایت در آسمان باز بود که با عدم وجود سطوح بازتابنده، اختلالات الکترومغناطیسی، و با شرایط بهینه برای ردیابی ماهواره ها (به عنوان مثال، بدون مانع) مشخص می شد. این دو سایت، یعنی A و B که به ترتیب در شکل 1 نشان داده شده اند، نشان دهنده دو شرایط اصلی هستند که کاربر در آن کار می کند یا سعی می کند فعالیت های موقعیت یابی را انجام دهد.
همراه با دو گوشی هوشمند، گیرنده u-blox نیز مورد استفاده قرار گرفت. این ابزار به نرم افزار نصب شده بر روی یک دستگاه خارجی برای جمع آوری هر دو اندازه گیری خام و نتایج بلادرنگ نیاز دارد. امروزه نرم افزارهای زیادی در بازار موجود است (به عنوان مثال، نرم افزارهایی که در [ 19 ] پیشنهاد شده اند]) که می تواند از فرمت باینری مالک (ubx.) برای به دست آوردن فایل های فرمت EXchange مستقل گیرنده (RINEX) یا راه حل های بلادرنگ بهره برداری کند. در این کار، ما از مجموعه RTKLIB (نسخه 2.4.3) هم برای استخراج داده های خام، هم برای تبدیل آنها در RINEX (با استفاده از ابزار RTKCONV) و هم برای انجام پس پردازش (با استفاده از ابزار RTKPOST) و واقعی استفاده کردیم. زمان (با استفاده از ابزار RTKNAVI) راه حل. این نرم افزار به خصوص جالب است زیرا یک بسته برنامه منبع باز برای موقعیت یابی استاندارد و دقیق با GNSS بسیاری از صورت فلکی (GPS، GLONASS، Galileo، BeiDou، QZSS، SBAS) است و از حالت های موقعیت یابی مختلف با GNSS برای هر دو زمان واقعی و پس از آن پشتیبانی می کند. رویکردهای پردازش: تک، دیفرانسیل GPS/GNSS (DGPS/DGNSS)، سینماتیک، استاتیک، متحرک-پایه، ثابت، PPP-سینماتیک (موقعیت یابی دقیق نقطه حرکتی)، PPP-استاتیک، و PPP ثابت شده است. همچنین شامل یک رابط کاربری گرافیکی (GUI) و رابط کاربری خط فرمان (CUI) با بسیاری از عملکردهای کتابخانه مربوط به عملکردهای ماهواره و سیستم ناوبری، عملکردهای ورودی و خروجی داده های جریانی، موقعیت یابی استاندارد، بلادرنگ و پس از پردازش است. این نرم افزار، همانطور که قبلا در ادبیات [20 ]، به ویژه جالب است زیرا اجازه می دهد تا داده های جریانی را که از شبکه ای از ایستگاه های دائمی با استفاده از حمل و نقل شبکه ای RTCM از طریق تأیید اعتبار پروتکل اینترنت (NTRIP) می آید، مدیریت کنید. علاوه بر این، RTKLIB اجازه می دهد تا ابهامات فاز را به عنوان مقادیر صحیح، با استفاده از روش اصلاح شده تنظیم همبستگی AMBiguity حداقل مربعات (LAMBDA) (MLAMBDA) [ 21 ]، رفع ابهامات فاز، به ویژه برای برنامه های بلادرنگ، که در آن سرعت محاسباتی انجام می شود. اجباری است [ 22 ].
متأسفانه، RTKLIB برای تلفن هوشمند مفید نیست زیرا هنوز به عنوان یک برنامه در دسترس نیست. بنابراین، در این مورد، از برنامه GEO++ RINEX برای کمک به دریافت اندازهگیریهای خام و ذخیره آنها در یک فایل RINEX استفاده شد. این نرم افزار یک تجزیه کننده RINEX و یک تحلیلگر مشاهده است که امکان تعریف پارامترهای خاص را برای استخراج تنها داده های مفید برای کاربر فراهم می کند. به ویژه، می توان انتخاب کرد که کدام صورت فلکی ذخیره شود و نسخه با فرمت RINEX. روش شناسی این کار در شکل 2 خلاصه شده است .
4. نتایج و بحث
از آنجایی که آزمایشهای مختلف به دنبال رویکردهای استاتیکی و سینماتیکی، همانطور که در بخش قبل توضیح داده شد، انجام شد، اکنون نتایج جالب اصلی با در نظر گرفتن دو نرمافزار مختلف مورد استفاده برای تجزیه و تحلیل پس از پردازش نشان داده شدهاند. برای ساختن مقاله ای خواناتر، این نتایج در دو زیربخش نشان داده شده و در مورد آنها توضیح داده می شود، اولی مربوط به رفتار با در نظر گرفتن دو محیط مختلف و دومی مقایسه نتایج تلفن های هوشمند با نتایج به دست آمده با گیرنده u-blox است. در هر دو مورد، نتایج با توجه به رویکرد پس پردازش به دست آمد، در حالی که در بخش سوم 4.3، نتایج بلادرنگ نشان داده خواهد شد. ما دو اطلاعات آماری اصلی را برای تجزیه و تحلیل نتایج بهدستآمده در نظر گرفتهایم: دقت برآورد شده از طریق ریشه میانگین مربعات خطا (RMSE) و دقت به عنوان تفاوت بین مقادیر میانگین برآورد شده و مقادیر مرجع.
4.1. موقعیتیابی عملکردها با توجه به محیطهای مختلف
ابتدا، رفتار چیپست داخلی GNSS با در نظر گرفتن رویکرد پس پردازش تحلیل شد. همانطور که مشخص است، برای انجام یک رویکرد پس پردازش نسبی، لازم است یک ایستگاه اصلی در نظر گرفته شود، که در این مورد توسط ایستگاه دائمی TORI (تورین) نشان داده می شود: این ایستگاه GNSS، که متعلق به چارچوب مرجع اروپایی است. (EUREF) شبکه GNSS دائمی ( www.epncb.oma.be )، توسط یک گیرنده چند فرکانس و چند صورت فلکی و یک آنتن حلقه خفه تشکیل شده است و حدود 250 متر از محل های آزمایش فاصله دارد.
هر دو گوشی هوشمند در دو سایت آزمایشی مختلف که قبلا ذکر شده بود، نقاط مرجع، که مختصات آنها با سطح دقت چند میلیمتری شناخته شده بود، مستقر شدند. در مورد سایت A، مختصات نقطه به مدت چند ساعت با گیرنده ژئودتیک (گیرنده Leica GS14) به صورت استاتیک اندازه گیری و پس از پردازش انجام شد. نقطه در سایت B بخشی از شبکه ملی ژئودزی است. اولین تحلیلها با توجه به نرمافزار RTKLIB و تکنیکهای موقعیتیابی مختلف انجام شد: موقعیتیابی تک نقطهای (SPP)، ایستا و سینماتیک. علاوه بر این، طول جلسات مختلف (10، 30 و 60 دقیقه) در نظر گرفته شد تا بررسی شود که آیا بین طول جلسه و دقت راه حل ها همبستگی وجود دارد یا خیر. نتایج در جدول 2 و جدول 3 ارائه شده است. تمام محلول ها با اعمال اصلاحات جوی زیر به دست آمد. مدل Saastamoinen برای کاهش تاخیر تروپوسفر با استفاده از اجزای خشک و مرطوب استفاده شد، در حالی که مدل Klobuchar برای مدل یونوسفر، ارتفاع برش را 10 درجه تنظیم کرد. همه نتایج با ثابت کردن ابهامات فاز به عنوان مقادیر صحیح، طبق روش “تثبیت و نگه داشتن” [ 18 ] به دست آمد.
با تجزیه و تحلیل نتایج در جدول 2 و جدول 3 ، به نظر می رسد که مکان A پر سر و صداتر از B بود زیرا دقت به دست آمده در حالت اول به دلیل اثرات چند مسیره به دلیل سطوح بازتابنده و دید محدود ماهواره ها کمتر بود. در عین حال، به نظر میرسد که هیچ ارتباطی بین طول جلسه و دقت وجود ندارد، که معمولاً در صورت استفاده از گیرندههای ژئودتیک یا هندلد اتفاق میافتد. این به دلیل کیفیت اندازهگیریهای خام است که نسبت به سایر گیرندههای بازار انبوه، مانند u-blox، پر سر و صداتر هستند. تجزیه و تحلیل سیگنال موضوع این مقاله نیست، اما همان دستگاه ها در [ 23 ] تجزیه و تحلیل شدند.
حتی در مورد راه حل های سینماتیک، تلفن های هوشمند به عنوان یک بررسی ایستا در یک مکان ثابت مستقر شدند. تنها تفاوت به دلیل ماتریس انتقال متفاوت در نظر گرفته شده در فیلتر کالمن بود. با تجزیه و تحلیل این نتایج می توان تأیید کرد که این نوع روش برای این ابزارها قابل اجرا نبوده است، بنابراین در بخش های بعدی این کار از آن غفلت خواهد شد.
برای تأیید تکرارپذیری این نتایج، مجموعه داده دیگری در همان مکان ها، با تکنیک های مشابه، جمع آوری شد. تنها با در نظر گرفتن Huawei P10+ و RTKLIB ( جدول 4 )، به نظر می رسد که هیچ تفاوت آشکاری با موارد به دست آمده در سایر مجموعه داده ها وجود ندارد.
همین مجموعه داده همچنین با نرم افزار Leica Geo Office 8.3 پردازش شد تا راه حل مستقل دیگری به دست آید تا نشان دهد عملکردهایی که امروزه با گوشی های هوشمند قابل دستیابی هستند مستقل از نرم افزار مورد استفاده برای پردازش هستند. جدول 5 نتایج بهدستآمده با تلفن هوشمند Huawei P10+ را نشان میدهد و نشان میدهد که نتایج بهدستآمده با این نرمافزار تجاری به طور کلی کمی بهتر از نتایج بهدستآمده با RTKLIB است، حتی اگر رفتار از نظر طول جلسه و شرایط محیطی یکسان باشد. حتی اگر هیچ نتیجهای در اینجا گزارش نشده باشد، مهم است که تاکید کنیم که هیچ تفاوتی در زمان استفاده از گوشی هوشمند سامسونگ گلکسی اس 8 پلاس وجود ندارد.
4.2. مقایسه بین نتایج U-Blox و گوشی های هوشمند
آزمایش اختصاصی دیگری برای مقایسه نتایج بهدستآمده با گوشیهای هوشمند و نتایج با سایر گیرندههای ارزان قیمت (u-blox) انجام شد. همه گیرندهها فقط در سایتی با بهترین دید ماهوارهای (سایت B)، نزدیک به یکدیگر مستقر شدند تا عملکرد را در بهترین شرایط ممکن (دید ماهوارهای خوب، بدون مانع یا اختلالات الکترومغناطیسی) بررسی کنند.
نویسندگان دو کمپین اندازه گیری مختلف را با طول جلسه به ترتیب 10 دقیقه و 30 دقیقه انجام دادند. در مورد اول ( جدول 6 )، به نظر می رسد که عملکرد گوشی های هوشمند بهتر از عملکردهای قابل دستیابی با گیرنده u-blox بوده است. این واقعاً رفتار عجیبی است و اگر جلسه طولانیتر آنالیز شود تأیید نشد ( جدول 7 ). این نتیجه عجیب احتمالا به دلیل نویز اندازه گیری های خام GNSS جمع آوری شده توسط گوشی هوشمند است. به طور کلی، فیلتر کردن و حذف نویز این مشاهدات واقعاً دشوار است.
تجزیه و تحلیل دقت و صحت قابل دستیابی به خصوص جالب توجه است. جدول 8 ، جدول 9 و جدول 10 این مقادیر را به ترتیب برای طول جلسه حدود 1 ساعت، 30 دقیقه و 10 دقیقه نشان می دهد.
با توجه به جدول 5 ، نتایج برای گوشی های هوشمند دقیق تر از دقیق هستند، در حالی که u-blox نتایج بهتری را هم از نظر دقت و هم در همان بازه زمانی ارائه می دهد. برای طول جلسه برابر با 30 دقیقه ( جدول 9 ) نتایج تلفن هوشمند کمی بدتر از مورد قبلی است زیرا طول جلسه نصف آن است ( جدول 8 ).
4.3. موقعیت یابی سینماتیک در زمان واقعی
مفهوم اصلی در پشت موقعیتیابی سینماتیک بلادرنگ (RTK) این است که شما باید اصلاحات دیفرانسیل بلادرنگ پخش شده توسط یک یا چند ایستگاه دائمی را بدست آورید. در این کار، شبکه GNSS «Servizio di Posizionamento Interregionale» (SPIN GNSS) ( https://www.spingnss.it/spiderweb/frmIndex.aspx ) در نظر گرفته شد و ایستگاه مرجع مجازی (VRS) را به عنوان تصحیح دیفرانسیل انتخاب کرد و پیام کمیسیون فنی رادیو برای دریانوردی (RTCM) 3.0 برای پرتاب پخش شده. برای استفاده همزمان از u-blox و گوشی هوشمند، داشتن نرم افزار رادیو اینترنتی GNSS ( https://igs.bkg.bund.de/ntrip/download ) ضروری است.) که امکان دستیابی به اصلاحات دیفرانسیل را برای مکان نزدیک به محل آزمایش فراهم می کند. این آخرین نرم افزار همچنین به ما اجازه می دهد تا اصلاحات را در یک فایل متنی ذخیره کنیم تا داده های ورودی یکسانی را برای u-blox و گوشی هوشمند ارائه دهیم. سپس از ابزار RTKNAVI که بخشی از نرم افزار RTKLIB می باشد برای انجام موقعیت یابی سینماتیکی شبکه بلادرنگ (NRTK) استفاده شد.
حتی در این مورد، نویسندگان دو کمپین اندازه گیری مختلف را با طول جلسه به ترتیب 5 و 10 دقیقه انجام دادند. این انتخاب به دلیل فاصله زمانی بود که یک کاربر عمومی میتواند برای دستیابی به دقت موقعیتیابی حدود 5 سانتیمتر منتظر بماند، همانطور که در [ 12 ] توضیح داده شد. همانند مورد قبلی، محل آزمایشی که در منطقه آسمان باز (سایت B) است انتخاب شد. با این وجود، با استفاده از تلفن هوشمند Huawei P10+، هیچ مشاهده سیگنالی با ابهامات فاز ثابت به عنوان یک مقدار صحیح [ 24 ] به دست نیامد، همانطور که از جدول 11 ممکن است مشاهده شود. نتایج کاملاً متفاوتی با توجه به گیرنده u-blox به دست آمد ( جدول 12). در این مورد، در 83٪ از راه حل ها، ابهامات فاز به عنوان مقادیر صحیح ثابت شد، و دقت حدود 3-4 سانتی متر هر دو برای مولفه 2D و بالاتر بود. بخش دوم این تحلیل به کیفیت موقعیتیابی برای دورههای مشاهده، که در آن ابهامات فاز ثابت نیستند (راهحلهای شناور) مربوط میشود. در تجزیه و تحلیل این نتایج، باید تاکید کرد که گیرنده u-blox دقت قابل مقایسه با راه حل های ثابت را ارائه می دهد، در حالی که دقت برای هر دو مؤلفه 2 بعدی و بالاتر حدود 40 سانتی متر بود.
با در نظر گرفتن جدول 11 و جدول 13 ، واضح است که چگونه این دو گوشی هوشمند متفاوت نتایج کاملا متفاوتی را ارائه کردند، نه تنها از نظر درصد راه حل های رفع مشکل، بلکه از نظر دقت و صحت. Samsung S8+ نتایج خوبی از نظر دقت ارائه کرد، حتی اگر مقادیر دقت آنچنان بالا نبود و به درصد پایینی از دورههای ثابت (14%) رسید.
رفتار نتایج Huawei P10+ کاملاً متفاوت بود. دقت در فاصله بین 3.18 متر و 5.52 متر بود، در حالی که دقت در 2.67 متر و 4.88 متر بود. علاوه بر این، هیچ راه حل تعمیری با این نوع دستگاه در دسترس نبود. این بدان معناست که همچنین با در نظر گرفتن مطالعات قبلی [ 18 ]، همه گیرندههای GNSS نصب شده در گوشیهای هوشمند نمیتوانند نتایج یکسانی ارائه دهند، زیرا مشاهدات خام شرایط متفاوتی از نظر نویز و دقت دارند. برای آینده، انجام همین آزمایش ها با توجه به چیپست های جدید GNSS و استفاده از صورت های فلکی و سیگنال های جدید GNSS جالب خواهد بود.
5. نتیجه گیری ها
تا چند سال پیش، حسگرهای کمهزینه و فناوریهای هوشمند بهعنوان راهحلهای «بازار انبوه» در نظر گرفته میشدند که میتوانستند موقعیتیابی بسیار تقریبی را تخمین بزنند و فقط برای ناوبری یا مکانیابی جغرافیایی سازگار شوند. امروزه فناوریهای جدید، نیازهای کاربر جدید، پلتفرمهای جدید (مثلاً اندروید 8.0) و چالشهای جدید باعث شده است که ابزار بسیار قدرتمند «ژئوماتیک» در اختیار ما قرار گیرد. گوشیهای هوشمند مدرن یا گیرندههای بازار انبوه میتوانند به کیفیت بسیار چشمگیری دست یابند، چه در موقعیت استاتیک و چه در موقعیتهای سینماتیک، و درها را برای تعداد زیادی از برنامهها و زمینههای تحقیقاتی باز میکنند. پهپاد، موقعیت یابی عابر پیاده، وسیله نقلیه زمینی بدون سرنشین، ردیابی اشیا، مسائل امنیتی، تنها لیست کوتاهی از حوزه های ممکن است که کیفیت قابل دستیابی با این نوع سنسورها می تواند جامع باشد.
در این مقاله، به شدت نشان داده شده است که کیفیت سیگنالهای جمعآوریشده با استفاده از این فناوریها کاملاً قادر به رسیدن به موقعیت خوب است. مطمئناً با ترکیب سنسورها با آنتن خارجی بهتر می توان عملکرد بهتری داشت و کاربردهای احتمالی دیگری را پایه گذاری کرد. ما نتایج به دست آمده را تنها با یک فرکانس ارائه کرده ایم. انتظار نمی رود که این در مورد عملکرد همه گوشی های هوشمند یکسان باشد، به خصوص، زیرا در سال 2018، اولین گوشی هوشمند با گیرنده GNSS چند صورت فلکی دو فرکانس (Xiaomi Mi8) عرضه شد. این مطالعه با هدف نشان دادن اینکه چگونه می توان نتایج متفاوتی را در عملکرد تکنیک های موقعیت یابی مختلف به دست آورد که می تواند با توجه به دقت و دقت درخواستی انتخاب شود. گامهای بعدی آزمایش عملکرد سایر گوشیهای هوشمند با سایر چیپستهای GNSS نصبشده برای ارائه یک نمای کلی عمیقتر از نتایج احتمالی امروزی خواهد بود. مطمئناً با توجه به سازهای جدیدی که در این چند ماه اخیر به بازار عرضه شده است، این کار نیز انجام خواهد شد.
اگر چند سال پیش، فناوریهای هوشمند تنها ابزاری برای تماس و چت بودند، امروزه این ابزارها به ابزارهای بالقوهای برای کاربردهای ژئوماتیک تبدیل شدهاند. در آینده نزدیک، صورت های فلکی و سیگنال های جدید به ما نوید بهبود کیفیت از نظر دقت و عملکرد را می دهند. بنابراین، این تنها گام اول این انقلاب موقعیتیابی جدید است.
منابع
- ماسیرو، آ. گوارنیری، آ. پیروتی، اف. Vettore, A. فیلتر ذرات برای پیمایش عابر پیاده داخلی مبتنی بر تلفن هوشمند. Micromachines 2014 ، 5 ، 1012-1033. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فدریچی، بی. جیاکوملی، دی. اسگوئرسو، دی. ویتی، ا. Zatelli، P. یک سرویس پردازش وب برای برنامه ریزی واقعی GNSS. Appl. Geomat. 2013 ، 5 ، 45-57. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- زندبرگن، PA; Barbeau, SJ دقت موقعیتی دادههای GPS کمکی از تلفنهای همراه با حساسیت بالای GPS. جی. ناویگ. 2011 ، 64 ، 381-399. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Van Diggelen، FST A-GPS: GPS کمکی، GNSS و SBAS . آرتک هاوس: نوروود، MA، ایالات متحده آمریکا، 2009. [ Google Scholar ]
- هامفریس، تی. موریان، م. ون دیگلن، اف. پودشیوالوف، اس. Pesyna، KM در مورد امکان سنجی موقعیت یابی دقیق سانتی متر از طریق آنتن گوشی هوشمند و تراشه GNSS. در مجموعه مقالات سمپوزیوم موقعیت، مکان و ناوبری IEEE/ION (PLANS)، ساوانا، GA، ایالات متحده آمریکا، 11 تا 14 آوریل 2016؛ صص 232-242. [ Google Scholar ]
- ژانگ، ک. جیائو، اف. لی، جی. ارزیابی اندازهگیریهای GNSS از تلفنهای هوشمند اندروید. در کنفرانس ناوبری ماهواره ای چین ؛ Springer: سنگاپور، 2018; صص 147-157. [ Google Scholar ]
- معماری Pepe، M. CORS و ارزیابی موقعیت یابی توسط گیرنده GNSS ارزان قیمت. Geod. کارتوگر. 2018 ، 44 ، 36-44. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لاشاپل، جی. گراتون، پی. هورلت، جی. لمیو، ای. برومندان، الف. ارزیابی یک واحد دستی کم هزینه با قابلیت داده خام GNSS و مقایسه با گوشی هوشمند اندروید. Sensors 2018 , 18 , 4185. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- ژانگ، ایکس. تائو، ایکس. زو، اف. شی، ایکس. Wang, F. ارزیابی کیفیت مشاهدات GNSS از تلفن هوشمند Android N و تجزیه و تحلیل عملکرد موقعیت یابی با استفاده از رویکرد فیلتر زمان متفاوت. راه حل GPS. 2018 ، 22 ، 70. [ Google Scholar ] [ CrossRef ]
- کاپلان، ای. Hegarty, C. درک GPS: اصول و کاربردها . آرتک هاوس: نوروود، MA، ایالات متحده آمریکا، 2005. [ Google Scholar ]
- میسره، ص. Enge, P. Global Positioning System: Signals, Measurements and Performance , 2nd ed.; انتشارات Ganga-Jamuna: لینکلن، MA، ایالات متحده آمریکا، 2006. [ Google Scholar ]
- دابوو، پ. گیرنده های انبوه جی پی اس و گلوناس Manzino، A. GLONASS: عملکردها و ویژگی های موقعیت یابی. Sensors 2014 , 14 , 22159–22179. [ Google Scholar ]
- فیسور، اف. ماسیرو، آ. پیراگنولو، م. پیروتی، اف. گوارنیری، آ. Vettore، A. به سمت نقشه برداری با گوشی هوشمند. در GNSS پیشرفته جدید و تکنیک های فضایی 3D . یادداشت های سخنرانی در اطلاعات جغرافیایی و نقشه برداری. Cefalo, R., Zieliński, J., Barbarella, M., Eds. Springer: Cham، سوئیس، 2018. [ Google Scholar ]
- دابوو، پ. دی پیترا، وی. حاتم، س. Piras، M. موقعیت یابی GNSS با استفاده از تلفن هوشمند Android. در مجموعه مقالات پنجمین کنفرانس بین المللی نظریه، کاربردها و مدیریت سیستم های اطلاعات جغرافیایی، هراکلیون، یونان، 3 تا 5 مه 2019؛ جلد 1، صص 135–142. [ Google Scholar ]
- هافمن-ولنهوف، بی. لیختنگر، اچ. Wasle، E. GNSS—GPS، GLONASS، Galileo و بیشتر ؛ Springer Wien: نیویورک، نیویورک، ایالات متحده آمریکا، 2008. [ Google Scholar ]
- روبوستلی، U. بایوچی، وی. Pugliano, G. ارزیابی مشاهدات GNSS فرکانس دوگانه از گوشی هوشمند اندرویدی شیائومی Mi 8 و تجزیه و تحلیل عملکرد موقعیت یابی. Electronics 2019 ، 8 ، 91. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- سینا، آ. دابوو، پ. Manzino، AM; پیراس، ام. موقعیت یابی تقویت شده با خدمات شبکه CORS با استفاده از گیرنده های بازار انبوه GNSS. در مجموعه مقالات سمپوزیوم موقعیت، مکان و ناوبری IEEE/ION (PLANS)، مونتری، کالیفرنیا، ایالات متحده آمریکا، 5 تا 8 مه 2014. صص 359-366. [ Google Scholar ]
- دابوو، پ. Di Pietra, V. به سمت موقعیت یابی GNSS در زمان واقعی با دقت بالا با گوشی های هوشمند. Adv. Space Res. 2019. [ CrossRef ]
- کاسلیمی، م. دولامیس، ن. دلیکارا اوغلو، دی. پلتفرمهای Protopapadakis، E. GNSSGET و GNSSPLOT- رابط کاربری گرافیکی متلب برای بازیابی محصولات GNSS و تجسم راهحلهای GNSS. در مجموعه مقالات VISIGRAPP، فونچال، پرتغال، 27 تا 29 ژانویه 2018؛ صص 626-633. [ Google Scholar ]
- تاکاسو، تی. Yasuda، A. توسعه گیرنده RTK-GPS کم هزینه با بسته برنامه منبع باز RTKLIB. در مجموعه مقالات سمپوزیوم بین المللی GPS/GNSS، کنوانسیون بین المللی، ججو، کره، 4 تا 6 نوامبر 2009. [ Google Scholar ]
- چانگ، XW; یانگ، ایکس. Zhou، T. MLAMBDA: یک روش LAMBDA اصلاح شده برای تخمین حداقل مربعات اعداد صحیح. جی. جئود. 2005 ، 79 ، 552-565. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Teunissen, PJG تنظیم همبستگی ابهام حداقل مربعات: روشی برای تخمین سریع ابهام GPS. جی. جئود. 1995 ، 70 ، 65-82. [ Google Scholar ] [ CrossRef ]
- گوگوی، ن. مینهتو، آ. لینتی، ن. Dovis، F. ارزیابی کیفیت محیط کنترلشده اندازهگیریهای خام GNSS اندروید. Electronics 2019 ، 8 ، 5. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- Teunissen PJ، G. حل ابهام فاز حامل ورهاگن، S. GNSS: چالش ها و مشکلات باز. در مشاهده زمین در حال تغییر ما ؛ Springer: برلین/هایدلبرگ، آلمان، 2009; صص 785-792. [ Google Scholar ]

شکل 1. دو محل آزمایش: مکانی که محیط پر سر و صدا را نشان می دهد (سمت چپ، سایت A) و یک مکان دست نخورده (راست، سایت B).
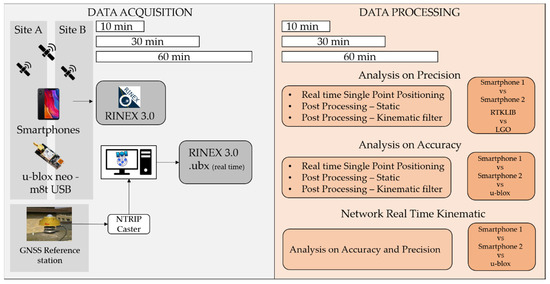
شکل 2. طرح کلی ترکیبی از فرآیندهای جمع آوری و پردازش داده ها.


بدون دیدگاه