

خلاصه
کلید واژه ها:
اسکن لیزری زمینی ; هواپیمای بدون سرنشین ; تطبیق تصویر ؛ سنجش از دور ؛ موجودی جنگل
1. معرفی
2. مواد و روشها
2.1. مساحت مطالعه و اندازه گیری ویژگی های ساختاری جنگل
مواد مطالعه شامل یک فهرست زمینی در سطح درخت، دادههای TLS و تصاویر هوایی جمعآوریشده از 27 قطعه نمونه (900-1200 متر مربع ) واقع در غرفههای کاج خالص ( Pinus sylvestris L.) در سه مکان مطالعه در جنوب فنلاند بود: Palomäki و Pollari واقع در Vilppula (62°02′ شمالی 24°29′ شرقی) و Vesijako در Padasjoki (61°21′ شمالی 25°06′ شرقی) ( شکل 1 ). ارتفاع بین 120 تا 150 متر از سطح دریا متغیر است زیرا مجموع دمای معمولی در مناطق مورد مطالعه حدود 1200 روز در روز است. داده های موجودی زمین در سطح درخت شامل 2102 درخت کاج اسکاتلندی بود که با استفاده از کولیس و کلینومتر اندازه گیری شدند [ 27 ، 44 ]] با دقت مورد انتظار 0.3 سانتی متر برای ارتفاع قطر در سینه (dbh) و 0.5 متر برای ارتفاع درخت [ 27 ]. ویژگیهای ساختاری جنگل در سطح کرت بر اساس گونههای درختی و dbh اندازهگیری شده و ارتفاع درخت محاسبه شد. مساحت پایه برای هر درخت با در نظر گرفتن سطح مقطع یک درخت به صورت دایره ای محاسبه شد. حجم ساقه برای هر درخت با استفاده از معادله حجمی گونه خاص در سراسر کشور توسط Laasasenaho [ 45 ]، که در آن dbh و ارتفاع درخت به عنوان متغیرهای توضیحی استفاده می شود، برآورد شد. سپس صفات ساختاری جنگل در سطح کرت، به عبارت دیگر TPH، G، Dg، Hg و V به معنیبه عنوان مجموع یا میانگین وزنی سطح پایه متغیرهای تک درختی با توجه به موارد زیر محاسبه شد:
که در آن n تعداد درختان در یک قطعه نمونه است، A مساحت قطعه نمونه بر حسب هکتار است، g i مساحت پایه درخت i است ، v i حجم ساقه i امین درخت است، d i است. dbh درخت i و h i ارتفاع درخت i است . بر اساس موجودی صحرایی، کرت های نمونه نشان دهنده توده های مدیریت شده و یکنواخت کاج اسکاتلندی بودند که در آن G بین 13.3 و 43.3 متر مربع در هکتار بود، که نشان دهنده تنوع زیادی در ساختار افقی جنگل است ( جدول 1 ). به ترتیب، Hg ، مشخص کننده ساختار عمودی، از 16.9 تا 24.6 متر متغیر است.
2.2. اکتساب و پیش پردازش اسکن لیزری زمینی و ابرهای نقطه فتوگرامتری
2.3. استخراج ویژگیهای ساختاری جنگل با استفاده از اسکن لیزری زمینی و ابرهای نقطهای چندحسی
2.4. ارزیابی های عملکرد
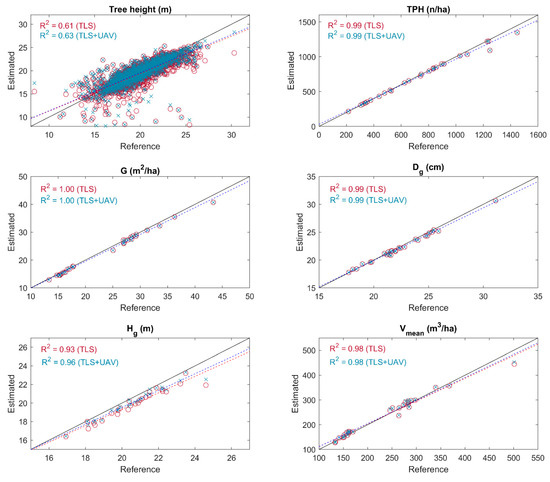
عملکرد روشها (یعنی فقط TLS و TLS+UAV) برای توصیف ساختار جنگل با مقایسه ارتفاع درخت ناشی از ابر نقطهای برای درختان منفرد و ویژگیهای ساختاری جنگل در سطح کرت (TPH، G، Dg، H ارزیابی شد . g , V mean ) با موارد اندازه گیری شده میدانی با استفاده از بایاس (میانگین خطا) و RMSE به عنوان معیارهای دقت
که در آن n تعداد نمودارهای نمونه است، ایکس^منویژگی درختی یا ویژگی ساختاری جنگلی مشتق شده از ابر نقطه TLS یا چندحسی برای نمودار i است، و ایکسمنویژگی مربوطه بر اساس موجودی میدانی است. علاوه بر این، ضریب تعیین (R2 ) برای توصیف نسبت واریانسی که رویکردهای مبتنی بر ابر نقطهای میتوانند از ویژگیهای ساختاری جنگل بگیرند، استفاده شد. دقت تشخیص درخت با محاسبه اینکه چقدر بخش بزرگی از درختان اندازهگیری شده در میدان به طور خودکار از ابرهای نقطهای شناسایی میشوند و اینکه این درختان چقدر از حجم کل ساقه درخت را نشان میدهند، ارزیابی شد.
3. نتایج
4. بحث
5. نتیجه گیری ها
منابع
- کروتر، TW; گلیک، HB; کاوی، KR; بتیگول، سی. مینارد، دی.اس. توماس، اس ام. اسمیت، جی آر. هینتلر، جی. دوگوید، ام سی; آماتولی، جی. و همکاران نقشه برداری از تراکم درختان در مقیاس جهانی طبیعت 2015 ، 525 ، 201-205. [ Google Scholar ] [ CrossRef ]
- Kapos, V. دیدن جنگل از میان درختان. Science 2017 ، 355 ، 347-349. [ Google Scholar ] [ CrossRef ]
- ساترلند، WJ; Freckleton، RP; گادفری، HCJ; بیسینگر، اس آر. بنتون، تی. کامرون، دی. کارمل، ی. کومز، دی. کولسون، تی. امرسون، ام سی؛ و همکاران شناسایی 100 سوال اساسی اکولوژیکی. جی. اکول. 2013 ، 101 ، 58-67. [ Google Scholar ] [ CrossRef ]
- لیانگ، ایکس. کانکاره، وی. Hyyppä، J.; وانگ، ی. کوکو، ا. هاگرن، اچ. یو، ایکس. کارتینن، اچ. جااکولا، ا. گوان، اف. و همکاران اسکن لیزری زمینی در فهرست جنگل ها ISPRS J. Photogramm. Remote Sens. 2016 ، 115 ، 63-77. [ Google Scholar ] [ CrossRef ]
- سفید، JC; Coops، NC; Wulder، MA; واستارانتا، م. هیلکر، تی. Tompalski, P. Remote Sensing Technologies for Enhancing Forest Inventory: A Review. می توان. J. Remote Sens. 2016 ، 42 ، 619-641. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Hyyppä، J.; یو، ایکس. هایپا، اچ. واستارانتا، م. هولوپاینن، م. کوکو، ا. کارتینن، اچ. جااکولا، ا. واجا، م. کوسکینن، جی. و همکاران پیشرفت در فهرست موجودی جنگل با استفاده از اسکن لیزری هوابرد. Remote Sens. 2012 ، 4 ، 1190-1207. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دانسون، اف ام؛ مورسفورف، اف. Koetz، B. اسکن لیزری هوابرد و زمینی برای اندازه گیری ساختار تاج پوشش گیاهی. در اسکن لیزری برای علوم محیطی ; Heritage, GL, Large, ARG, Eds. Blackwell Publishing Ltd.: Oxford, UK, 2009; ص 201-219. [ Google Scholar ]
- Vosselman, G. اسکن لیزری هوابرد و زمینی . CRC PressI Llc: Boca Raton, FL, USA, 2010; ISBN 9781439827987. [ Google Scholar ]
- لبرل، اف. ایرشارا، ا. پوک، تی. میکسنر، پی. گروبر، ام. شولز، اس. Wiechert، A. Point Clouds. فتوگرام مهندس Remote Sens. 2010 ، 76 ، 1123-1134. [ Google Scholar ] [ CrossRef ]
- بالتساویاس، ای. گرون، ا. آیزنبیس، اچ. ژانگ، ال. Waser, LT تطبیق تصویر با کیفیت بالا و تولید خودکار مدلهای درخت سه بعدی. بین المللی J. Remote Sens. 2008 ، 29 ، 1243-1259. [ Google Scholar ] [ CrossRef ]
- Hirschmuller، H. پردازش استریو دقیق و کارآمد با تطبیق نیمه جهانی و اطلاعات متقابل. در مجموعه مقالات کنفرانس IEEE Computer Society در سال 2005 در مورد دید رایانه و تشخیص الگو (CVPR’05)، سن دیگو، کالیفرنیا، ایالات متحده آمریکا، 20-25 ژوئن 2005. [ Google Scholar ]
- وایت، جی. ولدر، ام. واستارانتا، م. کوپس، ن. پیت، دی. Woods, M. The Utility of Image-based Point Clouds for Forest Inventory: مقایسه ای با اسکن لیزری هوابرد. Forests 2013 ، 4 ، 518-536. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Hyyppä، J.; Inkinen, M. تشخیص و تخمین صفات تک درختی با استفاده از اسکنر لیزری. فتوگرام جی. فینل. 1999 ، 16 ، 27-42. [ Google Scholar ]
- واکونن، جی. توکولا، تی. پاکالن، پی. Maltamo، M. شناسایی گونههای تجاری اسکاندیناوی از درختان منفرد از دادههای اسکن لیزری هوا با استفاده از معیارهای شکل آلفا. برای. علمی 2009 ، 55 ، 37-47. [ Google Scholar ]
- یو، ایکس. Hyyppä، J.; واستارانتا، م. هولوپاینن، م. ویتالا، آر. ISPRS J. Photogramm. Remote Sens. 2011 ، 66 ، 28-37. [ Google Scholar ] [ CrossRef ]
- یو، ایکس. Hyyppä، J.; لیتکی، پی. کارتینن، اچ. واستارانتا، م. Holopainen، M. راه حل تک سنسوری برای طبقه بندی گونه های درختی با استفاده از اسکن لیزری هوابرد چند طیفی. Remote Sens. 2017 ، 9 ، 108. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- سارینن، ن. واستارانتا، م. ناسی، ر. روسنل، تی. هاکالا، تی. هونکوارا، ای. ولدر، ام. لوما، وی. توماسلی، آ. ایمای، ن. و همکاران ارزیابی تنوع زیستی در جنگلهای شمالی با ابرهای نقطه فتوگرامتری مبتنی بر پهپاد و تصویربرداری فراطیفی. Remote Sens. 2018 , 10 , 338. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پولیتی، س. داش، جی پی؛ وات، ام اس؛ برایدنباخ، جی. Pearse، GD مقایسه اسکن لیزری پهپاد، فتوگرامتری و اسکن لیزر هوابرد برای فهرست دقیق خواص جنگل های کوچک. برای. بین المللی جی. برای. Res. 2020 ، 93 ، 150-162. [ Google Scholar ] [ CrossRef ]
- کانکاره، وی. راتی، ام. یو، ایکس. هولوپاینن، م. واستارانتا، م. کانتولا، تی. Hyyppä، J.; هایپا، اچ. آلهو، پی. Viitala، R. مدلسازی زیست توده تک درختی با استفاده از اسکن لیزری هوابرد. ISPRS J. Photogramm. Remote Sens. 2013 ، 85 ، 66-73. [ Google Scholar ] [ CrossRef ]
- کارتینن، اچ. Hyyppä، J.; یو، ایکس. واستارانتا، م. هایپا، اچ. کوکو، ا. هولوپاینن، م. هیپکه، سی. هیرشموگل، ام. مورسفورف، اف. و همکاران مقایسه بین المللی تشخیص و استخراج درختان با استفاده از اسکن لیزری هوابرد. Remote Sens. 2012 , 4 , 950–974. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لیانگ، ایکس. Hyyppä، J.; کارتینن، اچ. لهتوماکی، ام. پیورالا، جی. فایفر، ن. هولوپاینن، م. برولی، جی. فرانچسکو، پی. هاکنبرگ، جی. و همکاران معیار بینالمللی رویکردهای اسکن لیزری زمینی برای موجودیهای جنگل ISPRS J. Photogramm. Remote Sens. 2018 , 144 , 137–179. [ Google Scholar ] [ CrossRef ]
- واکونن، جی. ان، ال. گوپتا، اس. هاینزل، جی. هولمگرن، جی. پیتکانن، جی. سولبرگ، اس. وانگ، ی. ویناکر، اچ. هاگلین، KM; و همکاران آزمایش مقایسه ای الگوریتم های تشخیص تک درخت در انواع مختلف جنگل. جنگلداری 2012 ، 85 ، 27-40. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وانگ، ی. هایپا، جی. لیانگ، ایکس. کارتینن، اچ. یو، ایکس. لیندبرگ، ای. هولمگرن، جی. Qin، Y.; مالت، سی. فراز، ع. و همکاران معیار بینالمللی روشهای تشخیص درخت برای مدلسازی ساختار سایبان سه بعدی برای جنگلکاری و اکولوژی جنگل با استفاده از اسکن لیزری هوابرد. IEEE Trans. Geosci. Remote Sens. 2016 , 54 , 5011–5027. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژن، ز. کواکنبوش، ال. Zhang, L. روندها در تشخیص و ترسیم تاج درخت به طور خودکار – تکامل داده های LiDAR. Remote Sens. 2016 , 8 , 333. [ Google Scholar ] [ CrossRef ][ Green Version ]
- نیونهام، جی. آرمستون، جی دی. کالدرز، ک. دیزنی، MI; لاول، جی ال. Schaaf، CB; استراهلر، ق. مارک دانسون، F. اسکن لیزری زمینی برای اندازهگیری جنگل در مقیاس. کر. برای. Rep. 2015 , 1 , 239-251. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- داسوت، م. ثابت، تی. فورنیر، ام. استفاده از فناوری LiDAR زمینی در علم جنگل: زمینه های کاربردی، مزایا و چالش ها. ان برای. علمی 2011 ، 68 ، 959-974. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لوما، وی. سارینن، ن. ولدر، ام. وایت، جی. واستارانتا، م. هولوپاینن، م. Hyyppä، J. ارزیابی دقت در اندازهگیریهای میدانی متداول ویژگیهای درختی. Forests 2017 ، 8 ، 38. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- اولوفسون، ک. Holmgren, J. شناسایی نمایه ساقه تک درخت با استفاده از دادههای اسکنر لیزری زمینی، ویژگیهای برجستگی صافی و ویژگیهای انحنا. Forests 2016 , 7 , 207. [ Google Scholar ] [ CrossRef ]
- سارینن، ن. کانکاره، وی. واستارانتا، م. لوما، وی. پیورالا، جی. Tanhuanpää، T. لیانگ، ایکس. کارتینن، اچ. کوکو، ا. جااکولا، ا. و همکاران امکان سنجی اسکن لیزری زمینی برای جمع آوری اطلاعات حجم ساقه از تک درختان. ISPRS J. Photogramm. Remote Sens. 2017 ، 123 ، 140-158. [ Google Scholar ] [ CrossRef ]
- لیانگ، ایکس. لیتکی، پی. هایپا، جی. کارتینن، اچ. واستارانتا، م. Holopainen, M. نقشه برداری خودکار ساقه با استفاده از اسکن لیزری زمینی تک اسکن. IEEE Trans. Geosci. Remote Sens. 2012 , 50 , 661-670. [ Google Scholar ] [ CrossRef ]
- راومونن، پی. کاسالاینن، م. اکربلوم، ام. کاسالاینن، اس. کارتینن، اچ. واستارانتا، م. هولوپاینن، م. دیزنی، ام. Lewis, P. مدلهای درخت دقیق خودکار سریع از دادههای اسکنر لیزری زمینی. Remote Sens. 2013 ، 5 ، 491-520. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پیورالا، جی. لیانگ، ایکس. سارینن، ن. کانکاره، وی. وانگ، ی. هولوپاینن، م. Hyyppä، J.; Vastaranta، M. ارزیابی ساختار انشعاب برای تخمین کیفیت زیست توده و چوب با استفاده از ابرهای نقطه اسکن لیزری زمینی. می توان. J. Remote Sens. 2018 ، 44 ، 462-475. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کانکاره، وی. هولوپاینن، م. واستارانتا، م. پوتونن، ای. یو، ایکس. Hyyppä، J.; واجا، م. هایپا، اچ. Alho, P. تخمین زیست توده درختی با استفاده از اسکن لیزری زمینی. ISPRS J. Photogramm. Remote Sens. 2013 ، 75 ، 64-75. [ Google Scholar ] [ CrossRef ]
- کالدرز، ک. نیونهام، جی. برت، آ. مورفی، اس. راومونن، پی. هرولد، ام. کولونور، دی. آویتابیل، وی. دیزنی، ام. آرمستون، جی. و همکاران برآوردهای غیرمخرب زیست توده بالای زمین با استفاده از اسکن لیزری زمینی روش ها Ecol. تکامل. 2015 ، 6 ، 198-208. [ Google Scholar ] [ CrossRef ]
- اشنایدر، FD; کوکنبرینک، دی. Schaepman، ME; Schimel، DS; Morsdorf، F. کمی سازی ساختار سه بعدی و انسداد در جنگل های انبوه استوایی و معتدل با استفاده از LiDAR از برد نزدیک. کشاورزی برای. هواشناسی 2019 ، 268 ، 249-257. [ Google Scholar ] [ CrossRef ]
- وانگ، ی. لهتوماکی، ام. لیانگ، ایکس. پیورالا، جی. کوکو، ا. جااکولا، ا. لیو، جی. فنگ، ز. چن، آر. Hyyppä, J. آیا ارتفاع درخت اندازهگیری شده در میدان به همان اندازه قابل اعتماد است که تصور میشود—مطالعه مقایسه تخمینهای ارتفاع درخت از اندازهگیری میدانی، اسکن لیزر هوایی و اسکن لیزری زمینی در یک جنگل شمالی. ISPRS J. Photogramm. Remote Sens. 2019 ، 147 ، 132-145. [ Google Scholar ] [ CrossRef ]
- آیکاردی، آی. دابوو، پ. Lingua، AM؛ پیراس، ام. ادغام بین تکنیک های فتوگرامتری TLS و UAV برای کاربردهای جنگلداری. iForest Biogeosci. برای. 2017 ، 10 ، 41-47. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- میکیتا، تی. جاناتا، پ. Surový، P. فهرست پایه جنگلی بر اساس فتوگرامتری ترکیبی فاصله نزدیک هوایی و زمینی. برای. Trees Livelihoods 2016 , 7 , 165. [ Google Scholar ] [ CrossRef ][ Green Version ]
- Guerra-Hernández، J. Cosenza، DN; رودریگز، LCE; سیلوا، م. تومه، ام. دیاز-وارلا، RA; González-Ferreiro، E. مقایسه ابرهای نقطه ای با چگالی بالا مشتق از ALS و UAV (SfM) برای تشخیص درختان فردی در مزارع اکالیپتوس. بین المللی J. Remote Sens. 2018 , 39 , 5211–5235. [ Google Scholar ] [ CrossRef ]
- کوتیووری، ای. کوکونن، ام. مهتاتالو، ال. مالتامو، ام. کورهونن، ال. Packalen، P. موجودی جنگل برای مناطق کوچک با استفاده از تصاویر هواپیماهای بدون سرنشین بدون اندازهگیری میدانی درجا. سنسور از راه دور محیط. 2020 , 237 , 111404. [ Google Scholar ] [ CrossRef ]
- والاس، ال. لوسییر، آ. Malenovský، Z. ترنر، دی. Vopěnka، P. ارزیابی ساختار جنگل با استفاده از دو تکنیک UAV: مقایسه اسکن لیزری هوابرد و ساختار از ابرهای نقطه حرکت (SfM). برای. Trees Livelihoods 2016 , 7 , 62. [ Google Scholar ] [ CrossRef ][ Green Version ]
- وستوبی، ام جی. براسینگتون، جی. گلسر، NF; هامبری، ام جی; رینولدز، JM فتوگرامتری “ساختار از حرکت”: ابزاری کم هزینه و موثر برای کاربردهای علوم زمین. ژئومورفولوژی 2012 ، 179 ، 300-314. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آلونزو، ام. اندرسن، اچ.-ای. مورتون، دی. کوک، ب. کمی سازی ساختار و ترکیب جنگل های شمالی با استفاده از ساختار پهپاد از حرکت. Forests 2018 , 9 , 119. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سارینن، ن. کانکاره، وی. یرتیما، ت. ویلجانن، ن. هونکوارا، ای. هولوپاینن، م. هایپا، جی. هوسکونن، اس. هاینن، جی. Vastaranta، M. ارزیابی اثرات پویایی توده بر تخصیص رشد ساقه تک درختان کاج اسکاتلندی. bioRxiv 2020 . [ Google Scholar ]
- Laasasenaho، J. Männyn، Kuusen Ja Koivun Runkokäyrä- Ja Tilavuusyhtälöt. اشتراک. Inst. برای. فن 1982 ، 108 ، 74. [ Google Scholar ]
- جیمز، MR; رابسون، اس. کاهش خطای سیستماتیک در مدل های توپوگرافی مشتق شده از پهپاد و شبکه های تصویری زمینی. زمین گشت و گذار. روند. Landf. 2014 ، 39 ، 1413-1420. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کانلیف، AM; Brazier, RE; اندرسون، ک. تعیین کمیت در مقیاس دانه بسیار ریز ساختار پوشش گیاهی خشکبار با ساختار اکتسابی از پهپاد-از حرکت فتوگرامتری. سنسور از راه دور محیط. 2016 ، 183 ، 129-143. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کتابچه راهنمای کاربر Agisoft Agisoft Metashape نسخه حرفه ای. 2019. در دسترس آنلاین: https://www.agisoft.com/pdf/metashape-pro_1_5_en.pdf (در 6 مه 2020 قابل دسترسی است).
- ویلجانن، ن. هونکوارا، ای. ناسی، ر. هاکالا، تی. Niemeläinen، O. Kaivosoja, J. یک روش یادگیری ماشینی جدید برای تخمین زیست توده چمنها با استفاده از مدل ارتفاع تاج پوشش فتوگرامتری، تصاویر و شاخصهای پوشش گیاهی گرفته شده توسط یک هواپیمای بدون سرنشین. کشاورزی 2018 ، 8 ، 70. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- پولیتی، س. اورکا، اچ. گوباکن، تی. Næsset، E. فهرستی از مناطق جنگلی کوچک با استفاده از یک سیستم هوایی بدون سرنشین. Remote Sens. 2015 ، 7 ، 9632–9654. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Isenburg, M. LAStools—نرم افزار پردازش کارآمد LiDAR. 2017. در دسترس آنلاین: https://rapidlasso.com/lastools/ (دسترسی در 6 مه 2020).
- یرتیما، ت. سارینن، ن. کانکاره، وی. لیانگ، ایکس. Hyyppä، J.; هولوپاینن، م. Vastaranta، M. بررسی امکان سنجی اسکن لیزری زمینی با اسکن چندگانه برای مشخص کردن جوامع درختی در جنگل های شمالی جنوبی. Remote Sens. 2019 , 11 , 1423. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یرتیما، ت. سارینن، ن. کانکاره، وی. هاینن، جی. هوسکونن، اس. هولوپاینن، م. Hyyppä، J.; Vastaranta، M. عملکرد اسکن لیزری زمینی برای مشخص کردن تودههای کاج مدیریت شده (Pinus sylvestris L.) به تغییرات ساختاری جنگل بستگی دارد. EarthArXiv 2020 . [ Google Scholar ]
- پوپسکو، SC; Wynne، RH دیدن درختان در جنگل. فتوگرام مهندس Remote Sens. 2004 , 70 , 589-604. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Beucher, M. تقسیم بندی مورفولوژیکی ; انتشارات آکادمیک: کمبریج، MA، ایالات متحده آمریکا، 1990. [ Google Scholar ]
- ویلکس، پی. لاو، ا. دیزنی، ام. کالدرز، ک. برت، آ. د تاناگو، جی جی; بارتولومئوس، اچ. برید، بی. هرولد، ام. ملاحظات اکتساب داده برای اسکن لیزری زمینی قطعات جنگلی. سنسور از راه دور محیط. 2017 ، 196 ، 140-153. [ Google Scholar ] [ CrossRef ]
- گلوب، سی. ریتر، تی. واسرمن، سی. Nothdurft، A. تأثیر موقعیت اسکنر و اندازه قطعه بر دقت تشخیص درخت و تخمین قطر با استفاده از اسکن لیزری زمینی در قطعههای موجودی جنگل. Remote Sens. 2019 ، 11 ، 1602. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لیانگ، ایکس. وانگ، ی. پیورالا، جی. لهتوماکی، ام. یو، ایکس. کارتینن، اچ. کوکو، ا. هونکوارا، ای. عیسی، AEI; نوالاینن، او. و همکاران مشاهدات جنگلی در محل با استفاده از هواپیمای بدون سرنشین به عنوان جایگزینی برای اندازهگیریهای زمینی. برای. اکوسیستم. 2019 ، 6 ، 20. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لیم، ک. تریتز، پی. ولدر، ام. سنت اونگه، بی. سیل، M. LiDAR سنجش از دور ساختار جنگل. Prog. فیزیک Geogr. محیط زمین. 2003 ، 27 ، 88-106. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- واستارانتا، م. یرتیما، ت. سارینن، ن. یو، ایکس. کارجلاینن، م. نورمینن، ک. کاریلا، ک. کانکاره، وی. لوما، وی. پیورالا، جی. و همکاران اسکن لیزری هوابرد از تکنیکهای سه بعدی جایگزین در ثبت تغییرات ارتفاع درخت و تراکم جنگل در جنگلهای شمالی جنوبی بهتر عمل میکند. بالت. برای. 2018 ، 28 ، 268-277. [ Google Scholar ]
- واستارانتا، م. سارینن، ن. یرتیما، ت. کانکاره، وی. جونتیلا، اس. نظارت بر جنگل ها در فضا و زمان با استفاده از سنجش فاصله نزدیک. پیش چاپ 2020 ، 2020020300. [ Google Scholar ]
- کالدرز، ک. Jonckheere، I. بلبل، ج. Vastaranta، M. کاربردهای فناوری سنجش از دور در جنگلداری و REDD. جنگلها 2020 ، 11 ، 188. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- اکربلوم، ام. راومونن، پی. ماکیپا، آر. Kaasalainen، M. شناسایی خودکار گونه های درختی با مدل های ساختار کمی. سنسور از راه دور محیط. 2017 ، 191 ، 1-12. [ Google Scholar ] [ CrossRef ]
- آسن، اچ. هونکوارا، ای. لوسییر، آ. Zarco-Tejada، P. سنجش از دور کمی در وضوح فوق العاده بالا با طیف سنجی پهپاد: مروری بر فناوری حسگر، روش های اندازه گیری، و گردش های کاری تصحیح داده ها. Remote Sens. 2018 , 10 , 1091. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ایمانقلیلو، م. سارینن، ن. مارکلین، ال. روسنل، تی. ناسی، ر. هاکالا، تی. هونکوارا، ای. هولوپاینن، م. Hyyppä، J.; Vastaranta، M. مشخص کردن پایه های نهال با استفاده از ابرهای نقطه فتوگرامتری Leaf-Off و Leaf-On و تصاویر فراطیفی به دست آمده از وسیله نقلیه هوایی بدون سرنشین. Forests 2019 , 10 , 415. [ Google Scholar ] [ CrossRef ][ Green Version ]


بدون دیدگاه