

خلاصه
کلید واژه ها:
تخصیص پناهگاه با ظرفیت ; تخلیه سریع و قابل اعتماد ؛ انتخاب مسیر ؛ برنامه ریزی خطی عدد صحیح (ILP)
1. معرفی
2. کارهای مرتبط
2.1. تجزیه و تحلیل ریسک جغرافیایی و انتخاب مسیر
2.2. هدایت تخلیه و تعاملات انسانی
2.3. تخصیص پناهندگی
2.4. برنامه ریزی ریاضی چندهدفه
3. تخصیص پناهگاه با ظرفیت برای تخلیه سریع و قابل اطمینان
3.1. مقدماتی
یک مسیر تخلیه r را می توان با بردار جاده ها نشان داد. طول مسیر r را به صورت مجموع طول هر جاده e در r تعریف می کنیم :
جایی که دهطول جاده e . علاوه بر این، ما همچنین می توانیم قابلیت اطمینان مسیر را به صورت زیر تعریف کنیم [ 20 ]:
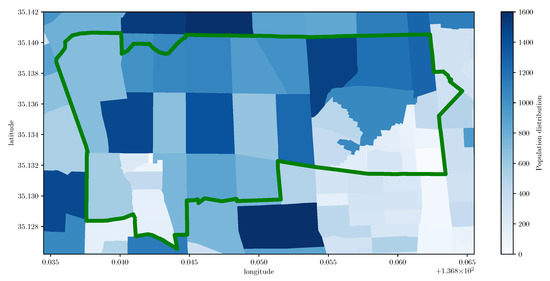
که احتمال این است که تمام جاده های e در طول مسیر r با فرض مستقل بودن احتمالات مسدود شدن جاده در طول مسیرها قابل عبور هستند. قابلیت اطمینان مسیر مقداری در محدوده می گیرد [0،1]و یک مقدار بزرگ (معمولاً کوچک) به معنای قابلیت اطمینان بالا (و یا کم) است. ما میتوانیم اطلاعات جغرافیایی (مثلاً موقعیت پناهگاه، ظرفیت پناهگاه، و توزیع ساکنان) را از دولت و شهرداریها قبل از وقوع فاجعه بدست آوریم [ 14 ، 26 ، 27 ]. هر پناهگاه j∈Dظرفیت دارد سیjافراد سی={سی1،سی2،…،سیD}مجموعه ای از ظرفیت پناهندگی را نشان می دهد.
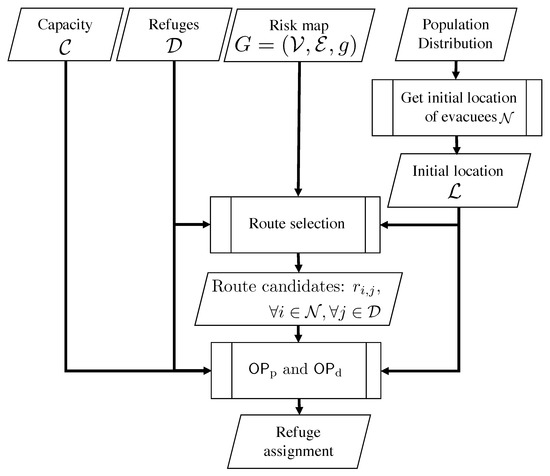
3.2. مروری بر طرح تخصیص پناهندگی پیشنهادی
3.3. فرمول دو مرحله ای ILP برای تخصیص پناهگاه
3.3.1. مرحله اول: به حداکثر رساندن میانگین قابلیت اطمینان مسیر در میان افراد تخلیه شده تحت محدودیت ظرفیت پناهگاه
با توجه به نامزدهای مسیر بین تخلیهشدگان و پناهگاههای احتمالی آنها به عنوان دادههای ورودی، که در بخش 3.4 توضیح داده خواهد شد ، ما ابتدا به حداکثر رساندن ایمنی تخلیه، یعنی میانگین قابلیت اطمینان مسیر در میان تخلیهشدگان، میخواهیم. این مشکل بهینه سازی را می توان با ILP زیر نشان داد OPپ.
3.3.2. مرحله دوم: به حداقل رساندن میانگین طول مسیر در میان افراد تخلیه شده تحت محدودیت ظرفیت پناهگاه و میانگین قابلیت اطمینان مسیر
ابتدا تابع هدف ( 3 ) با
که به حداقل رساندن میانگین طول مسیر در بین تخلیه شدگان است. علاوه بر محدودیت های OPپ، به عنوان مثال، (4) – (6)، OPدمحدودیت زیر را اضافه می کند:
3.4. محاسبه کاندیداهای مسیر سریع و قابل اعتماد بین افراد تخلیه شده و پناهگاه های احتمالی آنها
الگوریتم 1 یک تابع را ارائه می دهد نامزد_راه ها(جی،من،j،کحداکثر،δحداکثر،γهفتم)که حداکثر می شمرد کحداکثر (کحداکثر≥1)کوتاهترین مسیر بین تخلیه کننده i و پناهگاه j تحت محدودیت طول مسیر، δحداکثر (δحداکثر≥0)و قابلیت اطمینان مسیر، γهفتم (0≤γهفتم≤1). با توجه به شبکه راه جی=(V،E،g), evacue i , پناه j , پارامترها (کحداکثر،δحداکثر)، و γهفتم، ابتدا مجموعه ای از نامزدهای مسیر را مقداردهی اولیه می کند، ℛمن،jکحداکثر،δحداکثر،γهفتم، خالی و کوتاه ترین طول مسیر باشد ددقیقهبی نهایت بودن (خط 1). بعد، حداکثر به دست می آورد کحداکثرکاندیدای کوتاه ترین مسیر بین تخلیه i و پناهگاه j ، آرمن،jکحداکثر، با استفاده از k -هفتم_کوتاه ترین_راه ها(·)تابع بر اساس الگوریتم ین [ 50 ] (خط 2). همچنین طول کوتاه ترین مسیر را محاسبه می کند آرمن،jکحداکثر، ددقیقه(خط 3). در حلقه بعدی خطوط 4-8، نامزدهای مسیر سریع و قابل اعتماد را از آنها استخراج می کند آرمن،jکحداکثر. لطفا توجه داشته باشید که نامزدهای مسیر در آرمن،jکحداکثربه ترتیب صعودی طول مسیر مرتب می شوند. اگر طول مسیر r از کوتاه ترین مسیر بیشتر باشد، به عنوان مثال، ددقیقه، در یک سطح معین، δحداکثر، حلقه را متوقف می کند (خطوط 5-6). اگر قابلیت اطمینان مسیر r برابر یا بیشتر از یک آستانه باشد γتیساعت، r را به آن اضافه می کندℛمن،jکحداکثر،δحداکثر،γهفتم(خط 8). لطفاً توجه داشته باشید که طرح موجود در [ 20 ] این عملیات را ندارد، و بنابراین قابلیت اطمینان جاده به بهترین شکل در نظر گرفته میشود. بعد از حلقه، برمی گردد ℛمن،jکحداکثر،δحداکثر،γهفتمبه عنوان نامزدهای مسیر سریع و قابل اعتماد.
| الگوریتم 1 نامزد_راه ها(جی،من،j،کحداکثر،δحداکثر،γهفتم): شمارش حداکثر کحداکثرکوتاهترین مسیر بین تخلیه کننده i و پناهگاه j تحت محدودیت در طول مسیر، δحداکثرو قابلیت اطمینان مسیر، γهفتم. | |
| نیاز: جی،من،j،کحداکثر،δحداکثر،γهفتم | |
| اطمینان حاصل شود: ℛمن،jکحداکثر،δحداکثر،γهفتم | |
| 1: ℛمن،jکحداکثر،δحداکثر،γهفتم←∅، ددقیقه←∞ | ▹ اولیه سازی |
| 2: ℛمن،jکحداکثر← ک -کوتاه ترین_راه ها(جی،من،j،کحداکثر) | ▹ محاسبه کحداکثر-کوتاه ترین مسیرها |
| 3: ددقیقه←دقیقهr∈ℛمن،jکحداکثرfد(r) | ▹ محاسبه طول کوتاه ترین مسیر |
| 4: برای r∈ℛمن،jکحداکثر انجام دادن | |
| 5: اگر fد(r)-ددقیقه>δحداکثر سپس | ▹ وضعیت طول مسیر را بررسی کنید |
| 6: شکستن | |
| 7: اگر fپ(r)≥γتیساعت سپس | ▹ وضعیت قابلیت اطمینان مسیر را بررسی کنید |
| 8: ℛمن،jکحداکثر،δحداکثر،γهفتم←ℛمن،jکحداکثر،δحداکثر،γهفتم∪{r} | |
| 9: بازگشت ℛمن،jکحداکثر،δحداکثر،γهفتم | |
با در نظر گرفتن این ویژگی ها، ما یک تابع را پیشنهاد می کنیم سریع_قابل اعتماد_مسیر(جی،من،j،η،کحداکثر،δحداکثر)که نامزد مسیر سریع و قابل اعتماد را محاسبه می کند rمن،jبین تخلیه i و پناهگاه j (الگوریتم 2). با توجه به شبکه راه جی=(V،E،g)، evacuee i ، پناه j ، و پارامترها (کحداکثر، δحداکثر)، ابتدا مقداردهی اولیه می شود γهفتمحداکثر مقدار یعنی یک و ℛمن،jکحداکثر،δحداکثر،γهفتمیک مجموعه خالی باشد (خط 1). در حلقه بعدی خطوط 2-6، قابل اطمینان ترین مسیر را جستجو می کند rمن،jبین تخلیه i و پناهگاه j تحت محدودیت در کحداکثرو δحداکثر، با کاهش γهفتمدر یک فاصله زمانی معین، η، به عنوان مثال، η=0.1. اگر موفق به یافتن نامزدهای مسیر شود ℛمن،jکحداکثر،δحداکثر،γهفتماستفاده كردن نامزد_راه ها(·)(خط 3)، قابل اطمینان ترین مورد را به شرح زیر انتخاب می کند (خط 5):
در غیر این صورت، اگر ℛمن،jکحداکثر،δحداکثر،γهفتمخالی است، با تنظیم به جستجوی نامزدهای مسیر ادامه می دهد γهفتم=γهفتم-η(خط 6). در نتیجه، الگوریتم 2 مسیری سریع و قابل اعتماد را در اختیار ما قرار می دهد rمن،jبین تخلیه i و پناهگاه j .
| الگوریتم 2 سریع_قابل اعتماد_مسیر(جی،من،j،η،کحداکثر،δحداکثر): محاسبه نامزد مسیر سریع و قابل اعتماد rمن،jبین تخلیه i و پناهگاه j . | |
| نیاز: جی،من،j،η،کحداکثر،δحداکثر | |
| اطمینان حاصل شود: rمن،j | |
| 1: γهفتم←1، ℛمن،jکحداکثر،δحداکثر،γهفتم←∅ | ▹ اولیه سازی |
| 2: در حالی که γهفتم≥0 انجام دادن | |
| 3: ℛمن،jکحداکثر،δحداکثر،γهفتم←نامزد_راه ها(جی،من،j،کحداکثر،δحداکثر،γهفتم) | ▹ محاسبه نامزدهای مسیر |
| 4: اگر ℛمن،jکحداکثر،δحداکثر،γهفتم≠∅ سپس | |
| 5: بازگشت rمن،jطبق ( 9 ) | ▹ محاسبه نامزد مسیر سریع و قابل اعتماد |
| 6: γهفتم←γهفتم-η | ▹ به روز رسانی از γهفتم |
4. نتایج عددی
4.1. مدل ارزشیابی
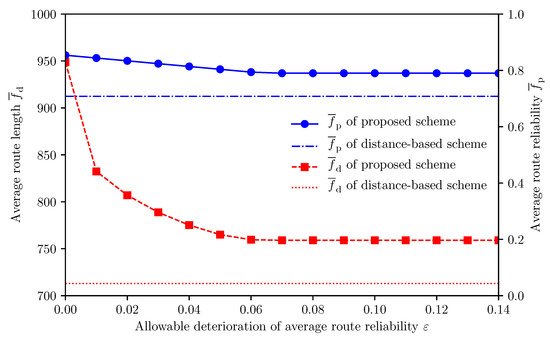
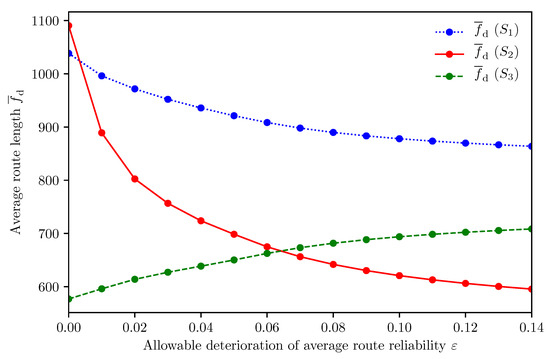
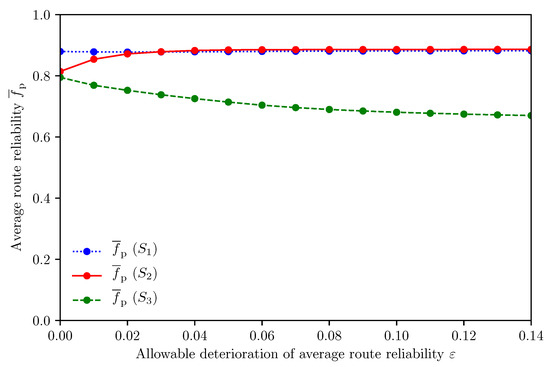
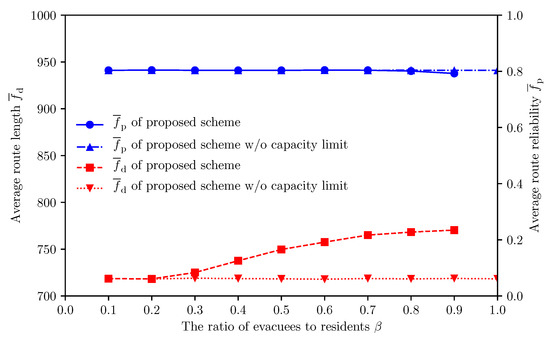
ما از دو نوع معیار استفاده می کنیم. اولین مورد میانگین طول مسیر است، f¯د، برای ارزیابی سرعت تخلیه که با تابع هدف مطابقت دارد ( 7 ). مورد دوم، میانگین قابلیت اطمینان مسیر است، f¯پکه مربوط به تابع هدف است ( 3 ).
4.2. تجزیه و تحلیل مبادله بین سرعت و ایمنی تحت محدودیت ظرفیت
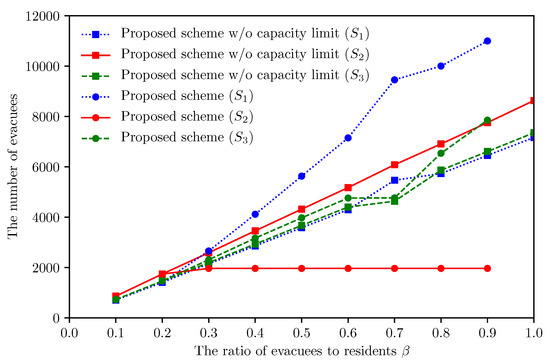
4.3. تأثیر محدودیت ظرفیت بر تخلیه سریع و قابل اطمینان
4.4. بحث
5. نتیجه گیری ها
ضمیمه A. احتمال انسداد جاده
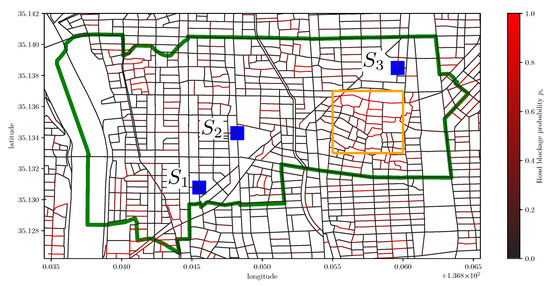
در مدل انسداد راه، در صورتی که اختلاف عرض و ارتفاع ساختمان فروریخته (یعنی عرض راه موجود) کمتر از σ=2 [متر]، که حداقل فضا برای تخلیه پیاده روی است. به عبارت صحیح تر، این مدل ابتدا یک جاده e را بین دو تقاطع به بخش هایی در هر 20 تقسیم می کند[متر]، که با عرض سایت ساختمان مطابقت دارد و احتمال انسداد را برای هر بخش محاسبه می کند س∈ه، پس، با توجه به رابطه بین عرض جاده افه [متر]و ارتفاع ساختمانها در بخش s در هر دو طرف جاده (یعنی ارتفاع اچس،1 [متر](مسابقه اچس،2 [متر]) ساختمان در یکی (نسبت به دیگری) کنار جاده 1 (نسبت به 2) از بخش s ). بدون از دست دادن کلیت، پسبا این فرض تعریف می شود اچس،1≥اچس،2:
جایی که آرس،1و آرس،2احتمال ریزش کلی ساختمان را به ترتیب در کنار جاده 1 و کنار جاده 2 از بخش s نشان می دهد. توجه داشته باشید که آرس،1و آرس،2بر اساس مدل فروریختن ساختمان کنار جاده محاسبه می شوند.
جاده e مسدود در نظر گرفته می شود زمانی که حداقل یک بخش س∈همطابق ( A1 ) مسدود شده است. در نتیجه، احتمال انسداد جاده پهرا می توان با بیان کرد
منابع
- کونگسومساکساکول، اس. یانگ، سی. چن، الف. مدل محل تخصیص پناهگاه برای برنامه ریزی تخلیه سیل. جی شرق. انجمن آسیا ترانسپ گل میخ. 2005 ، 6 ، 4237-4252. [ Google Scholar ]
- کوتینیو-رودریگز، جی. ترالهاو، ال. Alçada-Almeida، L. حل مسئله مکان یابی-مسیریابی با رویکرد چندهدفه: طراحی طرح های تخلیه شهری. J. Transp. Geogr. 2012 ، 22 ، 206-218. [ Google Scholar ] [ CrossRef ]
- کوتینیو-رودریگز، جی. سوزا، ن. Natividade-Jesus، E. طراحی طرح های تخلیه برای مراکز شهری متراکم. در مجموعه مقالات موسسه مهندسین عمران-مهندس شهرداری ; Thomas Telford Ltd.: لندن، انگلستان، 2015; جلد 169، صص 160–172. [ Google Scholar ]
- بایرام، وی. تانسل، B.Ç. یامان، اچ. سیستم و منافع کاربر در مکان یابی پناهگاه و برنامه ریزی تخلیه. ترانسپ Res. روش قسمت B. 2015 ، 72 ، 146-163. [ Google Scholar ] [ CrossRef ]
- کیلجی، ف. کارا، توسط; بوزکایا، ب. مکان یابی مناطق پناهگاه موقت پس از زلزله: موردی برای ترکیه. یورو جی. اوپر. Res. 2015 ، 243 ، 323-332. [ Google Scholar ] [ CrossRef ]
- خو، جی. یین، ایکس. چن، دی. آن، جی. Nie, G. مدل مکان یابی چند معیاره پناهگاه های تخلیه زلزله برای کمک به برنامه ریزی شهری. بین المللی J. کاهش خطر بلایا. 2016 ، 20 ، 51-62. [ Google Scholar ] [ CrossRef ]
- نگ، م. پارک، جی. والر، ST یک مدل دو سطحی ترکیبی برای تخصیص پناهگاه بهینه در تخلیه اضطراری. محاسبه کنید. کمک مدنی زیرساخت. مهندس 2010 ، 25 ، 547-556. [ Google Scholar ] [ CrossRef ]
- سعادت سرشت، م. منصوریان، ع. طالعی، م. برنامه ریزی تخلیه با استفاده از رویکرد بهینه سازی تکاملی چندهدفه. یورو جی. اوپر. Res. 2009 ، 198 ، 305-314. [ Google Scholar ] [ CrossRef ]
- بایرام، V. مدلهای بهینهسازی برای برنامهریزی و مدیریت تخلیه شبکه در مقیاس بزرگ: مروری بر ادبیات. Surv. اپراتور Res. مدیریت علمی 2016 ، 21 ، 63-84. [ Google Scholar ] [ CrossRef ]
- لو، کیو. جورج، بی. Shekhar, S. الگوریتم های مسیریابی محدود ظرفیت برای برنامه ریزی تخلیه: خلاصه ای از نتایج. در سمپوزیوم بین المللی پایگاه های داده مکانی و زمانی ; یادداشت های سخنرانی در علوم کامپیوتر; Springer: برلین/هایدلبرگ، آلمان، 2005; صص 291-307. [ Google Scholar ]
- یوسف، م. آریفین، ج. Mohamed, A. رویکردهای بهینه سازی برای برنامه ریزی تخلیه اضطراری ماکروسکوپی: یک بررسی. در مجموعه مقالات سمپوزیوم بین المللی فناوری اطلاعات 2008، کوالالامپور، مالزی، 26 تا 28 اوت 2008. جلد 3، ص 1-7. [ Google Scholar ]
- ژنگ، ی جی؛ چن، سی. لینگ، بهینهسازی تکاملی HF برای عملیاتهای امدادی بلایا: یک بررسی. Appl. محاسبات نرم. 2015 ، 27 ، 553-566. [ Google Scholar ] [ CrossRef ]
- شهر ناگویا سیاست توسعه شهر مقاوم در برابر زلزله. 2015. در دسترس آنلاین: https://www.city.nagoya.jp/jutakutoshi/cmsfiles/contents/0000002/2717/honpen.pdf (در 25 آوریل 2019 قابل دسترسی است). (به ژاپنی).
- سکیموتو، ی. شیباساکی، آر. کاناسوجی، اچ. اوسویی، تی. Shimazaki، Y. PFlow: بازسازی جریان مردم، بازیافت داده های بررسی اجتماعی در مقیاس بزرگ. محاسبات فراگیر IEEE 2011 ، 10 ، 27-35. [ Google Scholar ] [ CrossRef ]
- لارسون، دی. توسعه ساختار یک روش شاخص خطر آتش سوزی برای ساختمان های آپارتمانی چند طبقه با اسکلت چوبی . گزارش دانشجو؛ دانشگاه لوند: لوند، سوئد، 2000. [ Google Scholar ]
- ساسابه، م. فوجی، ک. Kasahara، S. تجزیه و تحلیل خطر شبکه جاده ای با توجه به جریان مردم در شرایط عادی و تخلیه. محیط زیست طرح. ب مقعد شهری. علوم شهر 2018 ، 47 ، 1-16. [ Google Scholar ] [ CrossRef ]
- کمیسیون فنی ایتالیا برای ریز پهنهبندی لرزهای. کتابچه راهنمای تجزیه و تحلیل شرایط اضطراری در سناریوهای شهری (راهنمای L’analisi della Condizione Limite Dell’emergenza Dell’insediamento Urbano (CLE)) . CNR، Dipartimento Sistemi di Produzione: رم، ایتالیا، 2014. (به ایتالیایی)
- فوجیهارا، ا. میوا، اچ. راهنمایی تخلیه فاجعه با استفاده از ارتباطات فرصت طلب: پتانسیل برای خدمات مبتنی بر فرصت. در کلان داده و اینترنت اشیا: نقشه راه برای محیط های هوشمند ؛ Bessis, N., Dobre, C., Eds. انتشارات بین المللی Springer: چم، سوئیس، 2014; جلد 546، ص 425–446. [ Google Scholar ]
- کوماتسو، ن. ساسابه، م. کواهارا، ج. Kasahara، S. طرح هدایت خودکار تخلیه بر اساس تعاملات ضمنی بین تخلیه کنندگان و گره های موبایل آنها. GeoInformatica 2018 ، 22 ، 127-141. [ Google Scholar ] [ CrossRef ]
- هارا، ت. ساسابه، م. Kasahara، S. انتخاب مسیر مبتنی بر تجزیه و تحلیل ریسک جغرافیایی برای هدایت تخلیه خودکار، سریع و قابل اعتماد با استفاده از دستگاه های تلفن همراه تخلیه کنندگان. J. محیط. هوشمند اومانیز. محاسبه کنید. 2019 ، 10 ، 2291-2300. [ Google Scholar ] [ CrossRef ]
- Galea، ER; H، X. لارنس، PJ مطالعات تجربی و پیمایشی در مورد اثربخشی سیستم های تابلوهای دینامیکی. آتش نشانی علمی 2014 ، 11 ، 1129-1143. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- زی، اچ. فیلیپیدیس، ال. Galea، ER; بلک شیلدز، دی. لارنس، PJ تجزیه و تحلیل تجربی اثربخشی علائم اضطراری و اجرای آن در شبیه سازی تخلیه. آتش نشانی. 2012 ، 36 ، 367-382. [ Google Scholar ] [ CrossRef ]
- زو، آر. لین، جی. بکریک-گربر، بی. لی، ن. تعاملات انسان-ساختمان-اضطراری و تأثیر آنها بر عملکرد واکنش اضطراری: مروری بر وضعیت هنر. Saf. علمی 2020 , 127 , 104691. [ Google Scholar ] [ CrossRef ]
- ILOG. بهینه ساز IBM ILOG CPLEX. 2019. در دسترس آنلاین: https://www.ibm.com/products/ilog-cplex-optimization-studio (در 25 آوریل 2019 قابل دسترسی است).
- MILT ژاپن. سرویس دانلود اطلاعات عددی زمین ملی: داده های ناحیه مدرسه. 2010. در دسترس آنلاین: https://nlftp.mlit.go.jp/ksj/gml/datalist/KsjTmplt-A27-v2_1.html (در 25 آوریل 2019 قابل دسترسی است). (به ژاپنی)
- استان آیچی پیوست طرح پیشگیری از بلایای منطقه ای استان آیچی. 2017. در دسترس آنلاین: https://www.pref.aichi.jp/bousai/boukei/list-fuzoku.htm (در 25 آوریل 2019 قابل دسترسی است). (به ژاپنی).
- MIC ژاپن e-Stat پورتال سایت آمار رسمی ژاپن. 2008. در دسترس آنلاین: https://www.e-stat.go.jp/en (در 25 آوریل 2019 قابل دسترسی است).
- Fruin, J. طراحی برای عابرین پیاده: مفهوم سطح خدمات . دانشگاه پلی تکنیک بروکلین: بروکلین، نیویورک، ایالات متحده آمریکا، 1970. [ Google Scholar ]
- سیفرید، ع. استفن، بی. لیپرت، تی. مبانی مدلسازی جریان عابر پیاده. فیزیک یک آمار مکانیک. Appl. 2006 ، 368 ، 232-238. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کوان، نماینده مجلس؛ Ransberger, DM LiDAR Assisted Emergency Response: شناسایی موانع شبکه حمل و نقل ناشی از بلایای بزرگ. محاسبه کنید. محیط زیست سیستم شهری 2010 ، 34 ، 179-188. [ Google Scholar ] [ CrossRef ]
- سانترلی، اس. برناردینی، جی. Quagliarini، E. برآورد آوار ساختمان زلزله در مراکز شهر تاریخی: از داده های دنیای واقعی تا معیارهای مبتنی بر تجربی. بین المللی J. کاهش خطر بلایا. 2018 ، 31 ، 281-291. [ Google Scholar ] [ CrossRef ]
- سانترلی، اس. برناردینی، جی. کوالیارینی، ای. D’Orazio، M. شاخص های جدید برای ارزیابی قابلیت اطمینان و در دسترس بودن شبکه خیابان های مراکز شهر موجود در شرایط اضطراری زلزله. بین المللی جی آرچیت. میراث. 2018 ، 12 ، 153-168. [ Google Scholar ] [ CrossRef ]
- کوالیارینی، ای. برناردینی، جی. سانترلی، اس. Lucesoli، M. مسیرهای تخلیه در مراکز شهر تاریخی: یک روش جامع برای ارزیابی خطر لرزه ای آنها. بین المللی J. کاهش خطر بلایا. 2018 ، 31 ، 698-710. [ Google Scholar ] [ CrossRef ]
- برناردینی، جی. کوالیارینی، ای. D’Orazio، M. به سمت ایجاد یک پایگاه داده ترکیبی برای مدل های تخلیه عابران پیاده زلزله. Saf. علمی 2016 ، 82 ، 77-94. [ Google Scholar ] [ CrossRef ]
- لیو، اچ. خو، بی. لو، دی. ژانگ، جی. یک رویکرد برنامه ریزی مسیر برای تخلیه جمعیت در ساختمان ها بر اساس الگوریتم بهبود یافته کلونی زنبورهای مصنوعی. Appl. محاسبات نرم. 2018 ، 68 ، 360-376. [ Google Scholar ] [ CrossRef ]
- کسایی، ی. ساسابه، م. Kasahara، S. انتخاب مسیر آگاه از تراکم در هدایت تخلیه خودکار بر اساس همکاری بین تخلیهکنندگان و گرههای متحرک آنها. EURASIP J. Wirel. اشتراک. شبکه 2017 ، 2017 ، 164. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- برناردینی، جی. سانترلی، اس. کوالیارینی، ای. D’Orazio، M. ابزار راهنمای دینامیکی برای تخلیه ایمن تر عابر پیاده در اثر زلزله در سیستم های شهری. محاسبه کنید. محیط زیست سیستم شهری 2017 ، 65 ، 150-161. [ Google Scholar ] [ CrossRef ]
- Fall, K. A Delay-Tolerant Network Architecture for Challenge Internet Architecture. در مجموعه مقالات کنفرانس 2003 کاربردها، فناوریها، معماریها و پروتکلها برای ارتباطات رایانهای، کارلسروهه، آلمان، 25-29 اوت 2003. ص 27-34. [ Google Scholar ]
- سوگیمن، تی. Misumi, J. توسعه یک روش جدید تخلیه برای شرایط اضطراری: کنترل رفتار جمعی توسط گروه های کوچک اضطراری. J. Appl. روانی 1988 ، 73 ، 3-10. [ Google Scholar ] [ CrossRef ]
- Ehrgott, M. بهینه سازی چند معیاره ; Springer Science & Business Media: برلین، آلمان، 2005; جلد 491. [ Google Scholar ]
- چانکونگ، وی. Haimes، YY تصمیم گیری چندهدفه: نظریه و روش شناسی ; انتشارات Courier Dover: Mineola، NY، USA، 2008. [ Google Scholar ]
- YV، YH; Lasdon، LS; Da Wismer، DA در مورد فرمول دو معیاری مشکلات شناسایی سیستم یکپارچه و بهینه سازی سیستم. IEEE Trans. سیستم مرد سایبرن. 1971 ، SMC-1 ، 296-297. [ Google Scholar ] [ CrossRef ]
- Mavrotas, G. پیاده سازی موثر روش ε- محدودیت در مسائل برنامه ریزی ریاضی چندهدفه. Appl. ریاضی. محاسبه کنید. 2009 ، 213 ، 455-465. [ Google Scholar ] [ CrossRef ]
- ماوروتاس، جی. فلوریوس، ک. یک نسخه بهبود یافته از روش محدودیت ε- افزوده (AUGMECON2) برای یافتن مجموعه پارتو دقیق در مسائل برنامه ریزی اعداد صحیح چند هدفه. Appl. ریاضی. محاسبه کنید. 2013 ، 219 ، 9652-9669. [ Google Scholar ] [ CrossRef ]
- دولت ژاپن. قانون اساسی مقابله با بلایا 1961. در دسترس آنلاین: https://www.japaneselawtranslation.go.jp/law/detail_main?re=02&vm=&id=3092 (در 25 آوریل 2019 قابل دسترسی است).
- انصاری، ری. کریستومو، سی. حسن، س. گویزانی، م. ممتاز، س. رودریگز، جی. رودریگز، شبکههای JJPC 5G D2D: تکنیکها، چالشها و چشماندازهای آینده. سیستم IEEE J. 2018 , 12 , 3970–3984. [ Google Scholar ] [ CrossRef ]
- سانتوس، آر. ماس، دی. زناتی، ت. Comfort، L. طراحی و اجرای یک واحد شاهد برای مسیریابی فرصت طلب در سناریوهای هشدار سونامی. Saf. علمی 2016 ، 90 ، 75-83. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- قدوس، م. Ochieng، WY; ژائو، ال. Noland، RB الگوریتم تطبیق نقشه عمومی برای برنامه های کاربردی مخابراتی حمل و نقل. راه حل GPS. 2003 ، 7 ، 157-167. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- عثمان، اف. موراکامی، ک. ویکاسونو، AD; Setiawan، E. کاربرد شبیه سازی مدل مبتنی بر عامل برای تخلیه سونامی در Pacitan، اندونزی. MATEC Web Conf. 2017 , 97 , 01064. [ Google Scholar ] [ CrossRef ]
- ین، JY یافتن K کوتاهترین مسیرهای بدون حلقه در یک شبکه. مدیریت علمی 1971 ، 17 ، 712-716. [ Google Scholar ] [ CrossRef ]


بدون دیدگاه