

خلاصه
کلید واژه ها:
جمع آوری داده های OpenStreetMap ; سنجش از دور ؛ تشخیص تغییرات جغرافیایی ; تقسیم بندی تصویر ؛ شبکه های عصبی مصنوعی ; پایگاه داده های بزرگ جغرافیایی
1. معرفی
1.1. تولید داده OpenStreetMap با کمک شبکه های عصبی مصنوعی
با فرض اینکه یک عضو جامعه OSM یک رکورد داده برداری جدید (گره ها، راه ها و برچسب ها در اصطلاح OSM) به ترتیب ده ها کیلوبایت (KB) در دقیقه اضافه کند، نسبت زمان سرمایه گذاری شده به زمان واقعی می گوید:
1.2. رویکردی به تولید OSM بر اساس یادگیری عمیق
1.3. کار مرتبط
1.4. مشارکت ها
-
ما کاربرد یک CycleGAN اصلاحشده را با مکانیزم توجه آموزشدیده بر روی تصاویر هوایی عمودی NAIP و کاشیهای شطرنجی OSM نشان میدهیم.
-
ما دقت تشخیص خانه را بر اساس رویکرد بالا کمیت میکنیم و آن را با معماری شبکه تشخیص خانه پیشرفته (U-Net) از ادبیات سنجش از دور مقایسه میکنیم.
-
ما استخراج یک نقشه حرارتی از پلتفرم بزرگ داده های جغرافیایی IBM Pairs را مثال می زنیم که کاشی های شطرنجی OSM و نقشه های تولید شده توسط CycleGAN اصلاح شده را ذخیره می کند. به این ترتیب، ما با موفقیت مناطق جغرافیایی را شناسایی میکنیم که نقشهبرداران OSM باید نیروی کار خود را متمرکز کنند.
-
ما درس های آموخته شده را در جایی ارائه می دهیم که رویکرد ما به تحقیقات بیشتر نیاز دارد. در زمینه کاشی های نقشه OSM که رنگ های مختلفی را به سلسله مراتب مختلف جاده ها اختصاص می دهد، ما درون یابی رنگ انجام شده توسط معماری CycleGAN اصلاح شده را بررسی می کنیم.
2. مواد و روشها
2.1. پلتفرم داده های جغرافیایی مقیاس پذیر، پردازش داده ها، و جذب
2.2. منابع اطلاعات
2.2.1. تصاویر هوایی NAIP
2.2.2. کاشی های نقشه Rasterized OSM
2.2.3. انتقال داده به جفت برای NAIP و OSM
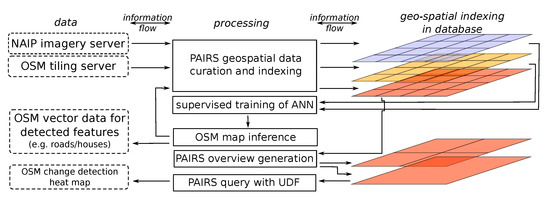
شکل 2 نمودار جریانی را در مورد نحوه ادغام پلت فرم داده IBM Pairs در پردازش داده برای روش مورد بحث در بخش 2.3 ارائه میکند : تصاویر هوایی عمودی NAIP و نقشههای OSM کاشیشده وارد موتور جذب جفتها میشوند که دادههای شطرنجی را مدیریت میکند و بهصورت مکانی-زمانی فهرستبندی میکند. به EPSG:4326/WGS 84 CRS. در سناریوی خود، ما استفاده از وضوح جفت سطح 26 را برای تصاویر NAIP و نقشه های OSM انتخاب کردیم. بنابراین، یک تناظر مستقیم یک به یک برای تمام پیکسل های فضایی همه لایه های شطرنجی درگیر وجود دارد. به طور خاص، برای هر پچ تصویر 512 × 512 NAIP قرمز سبز آبی (RGB) از جفت، یک تصویر 512 × 512 RGB مربوطه را به عنوان کاشی نقشه OSM برای آموزش ANN بازیابی کردیم. سطح وضوح L ، طبق تعریف، به این معناست:
درجه طول یا عرض جغرافیایی، یعنی با L=26، ما داریم 23× 10-6= 0.000008 درجه.
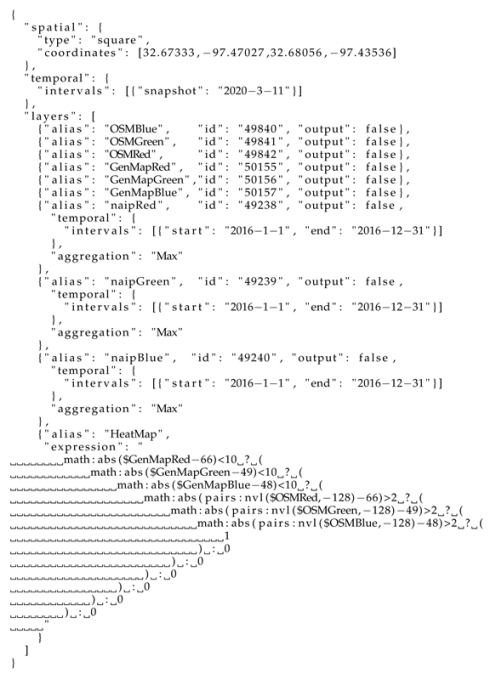
در حالی که نقشه تولید شده آپلود می شود، سیستم می تواند به طور خودکار هرمی از پیکسل های انبوه فضایی را مطابق با ساختار QuadTree پیکسل های لایه شطرنجی تو در تو بسازد. بنابراین، لایه های جفت به طور خودکار با سطح تفکیک فضایی پایین تر تولید می شوند L<26به عنوان لایه های نمای کلی دانه درشت عمل می کند. همان فرآیند ساخت هرم نمای کلی را می توان پس از جستجوی کد جداگانه داده ها با کمک یک تابع تعریف شده توسط کاربر جفت (UDF) آغاز کرد و نقشه حرارتی تشخیص تغییر را با وضوح فضایی بالا در سطح 26 ایجاد کرد. فهرست 1. سپس، یک فرآیند تولید لایه اجمالی بر اساس جمع مقدار پیکسل، منجر به یک نقشه حرارتی (ر.ک. شکل 3 f) کوچک در اندازه داده می شود. به این ترتیب، مقدار دادههایی که باید از جفتها برای نقشه حرارتی تشخیص تغییر پرس و جو شوند، به طور قابل توجهی کاهش مییابد.
لیست 1.
2.3. روش یادگیری عمیق
-
وقتی آموزش کامل شد، از ANN مربوط به دانشجو 1 استفاده می کنیم تا کاشی های نقشه شطرنجی OSM را از تصاویر هوایی عمودی NAIP استنتاج کنیم.
-
در طول کل آموزش، مدرس نیازی به در دسترس بودن جفت تصویر هوایی عمودی و نقشه نداشت. از آنجایی که OSM بر مشارکت های داوطلبانه متکی است و نقشه برداری از کل کره زمین یک کار برچسب گذاری دستی گسترده است و نیازی به در دسترس بودن جفت تصاویر هوایی عمودی و نقشه ندارد، امکان استفاده از نقشه های نادرست یا ناقص را در زمان آموزش فراهم می کند.
-
برای استفاده از این واقعیت که در سناریوی خود، ما واقعاً یک جفت تصویر NAIP و کاشی های نقشه OSM داریم، به استاد اجازه می دهیم هنگام تعیین تفاوت تصاویر NAIP توجه خود را بر روی زیرساخت های انسانی (مانند جاده ها و ساختمان ها) متمرکز کند. این انحراف از رویه CycleGAN همان چیزی است که ما در بخش 3.1 از آن به عنوان fw-CycleGAN (ویژگی وزن CycleGAN) یاد می کنیم .
2.4. کد کامپیوتر
3. آزمایش های عددی
3.1. CycleGAN دارای وزن ویژه برای تولید نقشه به سبک OSM
3.2. fw-CycleGAN برای تشخیص تغییر داده های OSM
عنصر مرکزی پرس و جوی JSON که تابع تعریف شده توسط کاربر است توسط:
4. نتایج و بحث
4.1. تشخیص ساختمان برای اضافه کردن برچسب خانه OSM
-
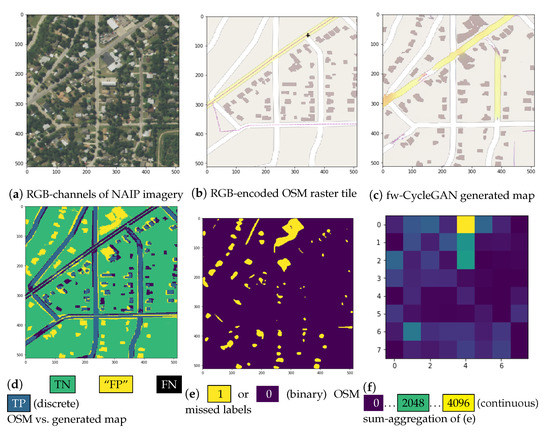
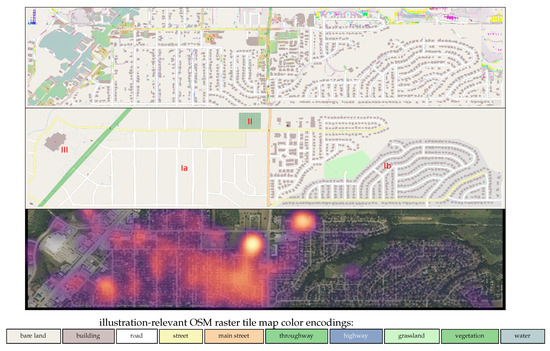
با توجه به کاشی های نقشه OSM، آشکار است که در وسط شکل، منطقه b دارای برچسب خانه های مسکونی است، در حالی که منطقه a هنوز توسط نقشه برداران OSM برچسب گذاری نشده است. با توجه به داده های NAIP از سال 2016، fw-CycleGAN قادر به شناسایی خانه ها در منطقه است به طوری که تکنیک ارائه شده در شکل 3 یک نقشه حرارتی با یک سیگنال نشانگر را نشان می دهد. بزرگی های جعلی در منطقه b ناشی از ارجاع جغرافیایی نادقیق ساختمان ها در نقشه OSM، و همچنین پوشش گیاهی بالای پشت بام ها در تصاویر NAIP هوایی است.با مراجعه به فهرست 1، ما مجبور بودیم تغییرات کمی در مقدار رنگ با بزرگی را در نظر بگیریم 2·1 = 2 در مورد رنگ ویژگی RGB برای ساختمانها در نقشه OSM شطرنجی M . بنابراین، رویکرد ما نسبت به آشفتگیهای جزئی در پسزمینه نقشه به غیر از زمینهای لخت ( (R,G,B) = (242,239,233) قابل تحمل شد ، رنگ شنی در منطقه a را ببینید) مانند پسزمینه خاکستری در منطقه b باید در نظر گرفته شود. برای. به طور مشابه، طیف وسیع تری از تحمل رنگ 2·9 = 18 برای نقشه تولید شده تنظیم شد م^که سر و صداتر بود علاوه بر این، همانطور که در شکل 5 بحث خواهیم کرد، مشاهده کردیم که fw-CycleGAN سعی کرد رنگها را به آرامی بر اساس زمینه ویژگی درونیابی کند.
-
fw-CycleGAN به درستی جاده ها و مسیرها را در مناطقی که OSM صرفاً نشانگر پارک/منطقه تفریحی داشت شناسایی کرد. با این حال، برای نقشه حرارتی تعریف شده توسط فهرست 1، ما تجزیه و تحلیل نقشه تولید شده را محدود کردیم م^فقط به خانه ها – به همین دلیل است که تغییر در شبکه جاده در این قسمت از تصویر توسط نقشه گرمایی منعکس نمی شود.
-
این بخش از تصویر محدودیت های رویکرد فعلی ما را نشان می دهد. در نقشه ایجاد شده، رنگها به شدت در نوسان بودند، در حالی که تکههای زمین بهعنوان تودههای آبی (آبی) یا جنگلی (سبز) مشخص شده بودند. اگر این مصنوعات نتیجه ویژگیهای خاص در نقشه باشد که به ندرت در مجموعه داده آموزشی نشان داده شده است، تحقیقات بیشتری لازم است. ما در حال برنامه ریزی برای آموزش مجموعه داده های بسیار بزرگتر برای پاسخ به این سوال هستیم.یکی دیگر از چالشهای رویکرد کنونی ما توسط منابع آبی گستردهتر به نمایش گذاشته شد. اگرچه در شکل 4 وجود ندارد ، ما متوجه تصویر عمودی تصویر به نقشه ANN هوایی fw-CycleGAN برای ایجاد ترکیبات پیچیده از تکهها در چنین مناطقی شدیم. با این وجود، نقشه حرارتی تولید شده توسط روش ذکر شده در بخش 3.2 سیگنال واضحی ایجاد نکرد که به طور بالقوه بتواند نقشهبرداران OSM را گمراه کند. بنابراین، هیچ هشدار کاذبی به دلیل این مصنوعات وجود نداشت. بدون در نظر گرفتن، منطقه ای که باید برچسب گذاری شود ممکن است به این شکل از دست داده شود.
4.2. تغییر سلسله مراتب جاده از درون یابی رنگ
-
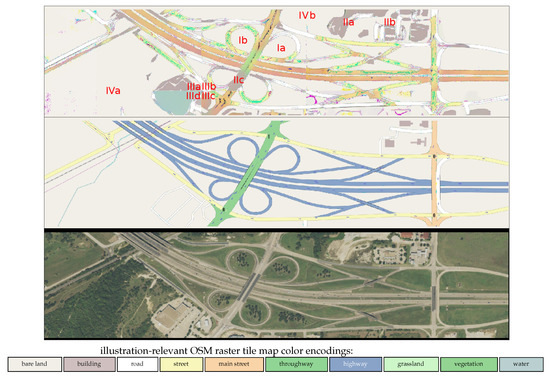
ما با تمرکز بر خروجی های دایره ای بزرگراه شروع می کنیم. همانطور که از تصویر مشخص است، fw-CycleGAN به جای تعیین یک مرز ناپیوسته، سعی کرد به تدریج از یک بزرگراه اصلی به یک خیابان محلی درون یابی کند.
-
برای آزمایشهای ما، وزن ویژگی کاهش قوام CycleGAN به جادهها و ساختمانها محدود شد. بر اساس بازرسی بصری مجموعه داده آموزشی ما از شهرهای تگزاس، مشاهده کردیم که پشت بامها (به ویژه ساختمانهای تجاری) و جادهها میتوانند رنگهای شنی تا خاکستری مشابهی داشته باشند. این ممکن است دلیل اصلی این باشد که چرا بر اساس استنباط، رنگ قهوهای معمولی برچسبهای خانه OSM در شبکه جادهها مخلوط شد، همانطور که در منطقه c به وضوح قابل مشاهده است. در واقع، به نظر می رسید که مناطق a و b از چنین فرضیه ای حمایت می کنند. به طور خاص، جاده هایی که به یک منطقه پارکینگ مسطح، گسترده و شنی منتهی می شوند (مانند منطقه a) ممکن است به اشتباه به عنوان پشت بام های مسطح، به عنوان مثال، یک مرکز خرید یا انبار، مانند منطقه IIIa و IIId تفسیر شوند.
-
به طور کلی، به نظر میرسد که زمینه نقش مهمی برای استنتاج بازی میکند: جایی که مناطق a تا d با هم ملاقات میکنند، انتقالهای واضح در تکههای رنگی قابل مشاهده است. نقشه تولید شده از دوخت موزاییک های تصویری 512 × 512 پیکسل بدون همپوشانی به دست آمده است. تفسیر مناطق لبه تحت تأثیر اطلاعات نمایش داده شده در جنوب غربی، شمال غربی، شمال شرقی و جنوب شرقی آن قرار گرفت. تغییرات می تواند منجر به تفسیر متفاوتی شود. بدون اثبات، ممکن است که صحنه طبیعی جنوب غربی منطقه d از یک طرف باعث ایجاد لحن آبی مایل به آبی (بدنه آبی) شده باشد، در حالی که، در مقابل، صحنه شهری شمال شرق منطقه a باعث ایجاد متناوب قهوه ای (ساختمان) و سفید (ساختمان) شده است. از طرف دیگر جاده محلی) رنگ آمیزی.
-
در نهایت، مناطق a و b مشخصه ای از روش وزن دهی ویژگی ما را ارائه کردند. اگرچه تصاویر NAIP شامل مناطق گسترده ای از پوشش گیاهی بود، fw-CycleGAN زمین خالی را استنباط کرد.
5. نتیجه گیری و دیدگاه ها
اختصارات
در این نسخه از اختصارات زیر استفاده شده است:
| هوش مصنوعی | هوش مصنوعی |
| ANN | شبکه های عصبی مصنوعی |
| CNN | شبکه عصبی کانولوشنال |
| کانوس | ایالات متحده به هم پیوسته |
| CRS | سیستم مرجع مختصات |
| درجه | واحد درجه برای اندازه گیری زاویه |
| ED | رمزگذار-رمزگشا |
| ESA | آژانس فضایی اروپا |
| FN | منفی اشتباه |
| FP | مثبت کاذب |
| fw | دارای ویژگی وزنی |
| GAN | شبکهی مولد متقابل |
| جی پی اس | سیستم موقعیت یاب جهانی |
| IoU | تقاطع روی اتحاد |
| LiDAR | تشخیص نور و محدوده |
| م _ م^ | OSM نقشه شطرنجی شده حقیقت زمین، نسخه تولید شده ANN |
| NAIP | محصولات تصویری کشاورزی ملی |
| ناسا | سازمان ملی هوانوردی و فضایی |
| OSM | OpenStreetMap |
| جفت | مخزن و خدمات یکپارچه تجزیه و تحلیل فیزیکی |
| رادار | تشخیص و برد رادیویی |
| RGB | قرمز سبز آبی |
| اس ، اس^ | تصاویر هوایی عمودی حقیقت زمین، نسخه تولید شده ANN |
| TN | منفی واقعی |
| TP | مثبت واقعی |
| TX | تگزاس |
| UDF | عملکرد تعریف شده توسط کاربر |
| USDA | وزارت کشاورزی آمریکا |
| USGS | سازمان زمین شناسی آمریکا |
| {T,G,M,K}B | {Tera,Giga,Mega,Kilo}بایت |
| XML | زبان نشانه گذاری توسعه پذیر |
ضمیمه A. پرایمر در شبکه های عصبی مصنوعی از دیدگاه کار ما
در ابتدا، فرض کنیم می خواهیم یک وابستگی عملکردی پیچیده را مدل کنیم م^=جی(اس). در مواردی که S یک تصویر هوایی RGB با ارجاع جغرافیایی را نشان می دهد، ما مؤلفه هایی داریم اسمنjک∈[0،255]، محدوده مقادیر صحیح نوع بایت معتبر، با i و j شاخص های پیکسل (عدد صحیح) مختصات طول و عرض جغرافیایی و k برای نمایه سازی کانال های رنگی رزرو شده است. تعریف M به عنوان یک نقشه OSM شطرنجی متناظر با عناصر ممنjک، G قصد دارد یک تقریب ایجاد کند م^نزدیک به M بر اساس ورودی آن S. یکی از راه های اندازه گیری انحراف M و م^تعیین انحراف درجه دوم از نظر پیکسلی است:
به طور رسمی به عنوان تابع ضرر نامیده می شود. با توجه به مجموعه ای از داده های آموزشی {(اس،م)}، Lکمینه سازی به صورت عددی فرآیند بهینه سازی را با تنظیم پارامترهای G که به عنوان آموزش مدل نظارت شده نیز شناخته می شود، هدایت می کند [ 89 ].
در حوزه هوش مصنوعی، G با یک ANN نشان داده می شود. یکی از زیرمجموعههای شبکهها، شبکههای عصبی کانولوشن (CNN) هستند. در بینایی کامپیوتر، به طور معمول، CNN ها به طور مکرر وضوح ورودی S را در ابعاد کاهش می دهندمن،jو آن را در k با دو عمل افزایش دهید: اول، چند عدد را اسلاید کنید (مثلا ک”=1،2،…،6)، هسته های پارامتری شده کمن”j”ک”(n)با اندازه ای به ترتیب چند پیکسل (به عنوان مثال، من”،j”=1،2،3) روی ورودی برای انحراف پیکسل های تصویر مطابق تابع خطی:
پس از آن، اعمال یک تابع تجمع A به پیکسل های همسایه اس(1)کاهش اندازه را برای ابعاد برچسب گذاری شده انجام می دهد من،j. یک انتخاب رایج، تجمیع غیر خطی با انتخاب حداکثر مقدار است که به آن حداکثر ادغام میگویند. اغلب، داده می شود آ(اس(1))، یک غیر خطی دیگر σ:آر→آربه طور جداگانه برای هر پیکسل اعمال می شود:
به گونه ای که ابعاد آ(اس(1))و اس^(1)همان هستند. طیف گسترده ای از انتخاب ها برای وجود دارد σ- همه مزایا و معایب خاص خود را دارند [ 90 ]. خیلی خشن بگویم، σورودی آن را سرکوب می کند ایکس∈آرزیر یک مقدار مشخصه σ0>ایکسو در بالا تقویت می شود، σ0≤ایکس، بنابراین سیگنال x را به عنوان خروجی فعال می کندσ(ایکس).
روش از S به اس^(1)می توان N بار تکرار کرد تا به پیکسل های تصویر ختم شود اسمنjک(ن)با کاهش ابعاد فضایی من،j=1…من≲10و بعد کانال ویژگی را به طور قابل توجهی افزایش داد ک≫10. قدم از اس^(n)به اس^(n+1)با اصطلاح یک لایه شبکه عصبی همراه است که توسط وزن هسته پارامتر شده است کمنjک(n). ممکن است تبدیل کلی را به صورت بنویسیم اس^(ن)=هن(اس)و آن را به عنوان رمزگذار CNN ارجاع دهید. به روشی مشابه، ما میتوانیم با یک رمزگشای CNN برای به دست آوردن موارد زیر از هم خارج شویم:
در نهایت، تنظیم جی=دن∘هنبه جای ساده جی=دنو اجرای بازی GAN به هر دو صورت، یعنی از تصاویر NAIP تا کاشی های نقشه OSM، و بالعکس، دو چرخه بسته قابل ساخت هستند:
که منجر به دو چرخه تلفات ثبات می شود L:
به ترتیب. تنها تفاوت CycleGAN با fw-CycleGAN وزن کردن مجموع ها در (اس^-اس)2با توجه به اینکه آیا پیکسل های مربوطه M یک ویژگی زیرساختی انسانی مانند ساختمان ها یا جاده ها را نشان می دهند یا خیر.
منابع
- نقشه خیابان باز در دسترس آنلاین: https://www.openstreetmap.org/ (در 25 ژوئن 2020 قابل دسترسی است).
- ویرایشگر OpenStreetMap. در دسترس آنلاین: https://www.openstreetmap.org/edit (در 25 ژوئن 2020 قابل دسترسی است).
- او، ک. گیوکسری، جی. دلار، پی. Girshick, R. Mask R-CNN. در مجموعه مقالات کنفرانس بین المللی IEEE در بینایی کامپیوتر، ونیز، ایتالیا، 22 تا 29 اکتبر 2017؛ صفحات 2961-2969. [ Google Scholar ] [ CrossRef ]
- بدرینارایانان، وی. کندال، ا. Cipolla، R. Segnet: معماری رمزگذار-رمزگشای پیچیده پیچیده برای تقسیمبندی تصویر. IEEE Trans. الگوی مقعدی ماخ هوشمند 2017 ، 39 ، 2481-2495. [ Google Scholar ] [ CrossRef ]
- SegNet. در دسترس آنلاین: https://mi.eng.cam.ac.uk/projects/segnet/ (در 25 ژوئن 2020 قابل دسترسی است).
- ایزولا، پی. زو، جی. ژو، تی. Efros، ترجمه تصویر به تصویر AA با شبکه های خصمانه مشروط. در مجموعه مقالات کنفرانس IEEE 2017 در مورد دید رایانه و تشخیص الگو (CVPR)، هونولولو، HI، ایالات متحده آمریکا، 21 تا 26 ژوئیه 2017؛ صص 5967–5976. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ترجمه تصویر به تصویر با شبکه های خصمانه مشروط. در دسترس آنلاین: https://philipi.github.io/pix2pix/ (در 25 ژوئن 2020 قابل دسترسی است).
- رونبرگر، او. فیشر، پی. Brox، T. U-Net: شبکه های کانولوشن برای تقسیم بندی تصویر زیست پزشکی. در مجموعه مقالات کنفرانس بین المللی محاسبات تصویر پزشکی و مداخله به کمک کامپیوتر، مونیخ، آلمان، 5 تا 9 اکتبر 2015. صص 234-241. [ Google Scholar ]
- Schmidhuber، J. Minimax بدون نظارت: کنجکاوی متخاصم، شبکه های متخاصم مولد، و به حداقل رساندن قابلیت پیش بینی. arXiv 2019 ، arXiv:cs/1906.04493. [ Google Scholar ]
- ژانگ، آر. آلبرشت، سی. ژانگ، دبلیو. کوی، ایکس. فینکلر، یو. کونگ، دی. Lu, S. تولید نقشه از برچسب های داده های ناقص و نادرست مقیاس بزرگ. arXiv 2020 ، arXiv:2005.10053. [ Google Scholar ]
- زو، جی. پارک، تی. ایزولا، پی. Efros، ترجمه AA بدون جفت تصویر به تصویر با استفاده از شبکه های متخاصم سازگار با چرخه. در مجموعه مقالات کنفرانس بین المللی IEEE در بینایی کامپیوتر، ونیز، ایتالیا، 22 تا 29 اکتبر 2017؛ صص 2242-2251. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- صفحه پروژه CycleGAN. در دسترس آنلاین: https://junyanz.github.io/CycleGAN/ (در 25 ژوئن 2020 قابل دسترسی است).
- Tiecke، TG; لیو، ایکس. ژانگ، ا. گروس، آ. لی، ن. یتمن، جی. کیلیچ، تی. موری، اس. بلانکسپور، بی. پریض، ای بی; و همکاران نقشه برداری از جمعیت جهان یک ساختمان در یک زمان. arXiv 2017 ، arXiv:cs/1712.05839. [ Google Scholar ]
- ایگلوویکوف، وی. سفربکوف، اس.اس. بوسلایف، آ. Shvets، A. TernausNetV2: شبکه کاملاً پیچیده برای تقسیمبندی نمونه. در مجموعه مقالات کنفرانس در کارگاه های بینایی کامپیوتری و تشخیص الگو (CVPRW)، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 22 ژوئن 2018؛ جلد 233، ص. 237. [ Google Scholar ]
- Microsoft/USBuildingFootprints. در دسترس آنلاین: https://github.com/microsoft/USBuildingFootprints (در 25 ژوئن 2020 قابل دسترسی است).
- آلبرت، آ. کائور، ج. گونزالس، ام سی استفاده از شبکه های کانولوشن و تصاویر ماهواره ای برای شناسایی الگوها در محیط های شهری در مقیاس بزرگ. در مجموعه مقالات بیست و سومین کنفرانس بین المللی ACM SIGKDD در مورد کشف دانش و داده کاوی، هالیفاکس، NS، کانادا، 13 تا 17 اوت 2017؛ صص 1357–1366. [ Google Scholar ]
- راخلین، ا. دیویدو، ا. نیکولنکو، طبقهبندی پوشش زمین SI از تصاویر ماهوارهای با U-Net و Lovasz-Softmax Loss. در مجموعه مقالات کنفرانس در کارگاه های بینایی کامپیوتری و تشخیص الگو (CVPRW)، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 22 ژوئن 2018؛ صص 262-266. [ Google Scholar ]
- کائو، آر. ژو، جی. تو، دبلیو. لی، کیو. کائو، جی. لیو، بی. ژانگ، کیو. Qiu, G. یکپارچه سازی تصاویر هوایی و نمای خیابان برای طبقه بندی کاربری زمین شهری. Remote Sens. 2018 ، 10 ، 1553. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- کو، تی اس; Tseng، KS; یان، JW; لیو، YC; وانگ، شبکه تجمع عمیق YCF برای طبقه بندی پوشش زمین. در مجموعه مقالات کنفرانس در کارگاه های بینایی کامپیوتری و تشخیص الگو (CVPRW)، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 22 ژوئن 2018؛ صص 252-256. [ Google Scholar ]
- ژو، ال. ژانگ، سی. Wu, M. D-LinkNet: لینک نت با رمزگذار از پیش آموزش دیده و پیچش گشاد شده برای استخراج جاده تصاویر ماهواره ای با وضوح بالا. در مجموعه مقالات کنفرانس IEEE/CVF 2018 در کارگاه های آموزشی بینایی رایانه و تشخیص الگو (CVPRW)، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 22 ژوئن 2018؛ صفحات 192-1924. [ Google Scholar ] [ CrossRef ]
- Oehmcke، S. تریسو، سی. بورگستاد، آ. Salles، MAV; برانت، ام. Gieseke، F. تشخیص جاده های به سختی قابل مشاهده در داده های سری زمانی ماهواره ای با وضوح پایین. arXiv 2019 ، arXiv:1912.05026. [ Google Scholar ]
- بوسلایف، آ. سفربکوف، اس.اس. ایگلوویکوف، وی. Shvets، A. شبکه کاملاً پیچیده برای استخراج خودکار جاده از تصاویر ماهواره ای. در مجموعه مقالات کنفرانس در کارگاه های بینایی کامپیوتری و تشخیص الگو (CVPRW)، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 22 ژوئن 2018؛ ص 207-210. [ Google Scholar ]
- شیا، دبلیو. ژانگ، YZ; لیو، جی. لو، ال. یانگ، ک. استخراج جاده از تصویر با وضوح بالا با شبکه پیچیدگی عمیق – مطالعه موردی تصویر GF-2. در مجموعه مقالات موسسه انتشارات دیجیتال چند رشته ای ; MDPI: بازل، سوئیس، 2018؛ جلد 2، ص. 325. [ Google Scholar ]
- وو، اس. دو، سی. چن، اچ. خو، ی. گوا، ن. Jing, N. استخراج جاده از تصاویر با وضوح بسیار بالا با استفاده از خط مرکزی OpenStreetMap با برچسب ضعیف. ISPRS Int. J. Geo-Inf. 2019 ، 8 ، 478. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- شیا، دبلیو. ژونگ، ن. گنگ، دی. Luo, L. یک رویکرد استخراج جاده با نظارت ضعیف از طریق تقسیمبندی تصویر مبتنی بر شبکههای پیچیده. در مجموعه مقالات کارگاه بین المللی 2017 سنجش از دور با پردازش هوشمند (RSIP)، شانگهای، چین، 19 تا 21 مه 2017؛ صص 1-5. [ Google Scholar ]
- سان، تی. دی، ز. چه، پ. لیو، سی. Wang, Y. استفاده از دادههای GPS جمعسپاری شده برای استخراج جاده از تصاویر هوایی. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 16 تا 20 ژوئن 2019؛ صص 7509–7518. [ Google Scholar ]
- روآن، اس. لانگ، سی. بائو، جی. لی، سی. یو، ز. لی، آر. لیانگ، ی. او، تی. Zheng, Y. یادگیری ایجاد نقشه از مسیرها. در مجموعه مقالات کنفرانس AAAI در مورد هوش مصنوعی، نیویورک، نیویورک، ایالات متحده آمریکا، 7 تا 8 فوریه 2020. [ Google Scholar ]
- لیو، من؛ بروئل، تی. کاوتز، جی. شبکه های ترجمه تصویر به تصویر بدون نظارت. در پیشرفت در سیستم های پردازش اطلاعات عصبی ; Curran Associates, Inc.: Red Hook, NY, USA, 2017; ص 700-708. [ Google Scholar ]
- بونافیلیا، دی. گیل، جی. باسو، س. یانگ، دی. ساختن نقشههای با وضوح بالا برای کمکهای بشردوستانه و توسعه با یادگیری ضعیف و نیمه نظارت. در مجموعه مقالات کنفرانس IEEE در کارگاه های آموزشی بینایی رایانه و تشخیص الگو، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 16 تا 20 ژوئن 2019؛ صفحات 1-9. [ Google Scholar ]
- سینگ، اس. باترا، ا. پانگ، جی. ترسانی، ال. باسو، س. پالوری، م. جواهر، سی. آموزش ویژگی تحت نظارت خود برای تقسیم بندی معنایی تصاویر بالای سر. در مجموعه مقالات کنفرانس بینایی ماشین بریتانیا، نیوکاسل آپون تاین، بریتانیا، 3 تا 6 سپتامبر 2018؛ انجمن بینایی ماشین بریتانیا: دورهام، بریتانیا، 2018. [ Google Scholar ]
- گانگولی، س. گارزون، پی. Glaser, N. Geogan: یک گان مشروط با بازسازی و از دست دادن سبک برای تولید لایه استاندارد نقشه ها از تصاویر ماهواره ای. arXiv 2019 ، arXiv:1902.05611. [ Google Scholar ]
- یادگیری ماشین – OpenStreetMap Wiki. در دسترس آنلاین: https://wiki.openstreetmap.org/wiki/Machine_learning (در 25 ژوئن 2020 قابل دسترسی است).
- جفتهای IBM – Geoscope. در دسترس آنلاین: https://ibmpairs.mybluemix.net/ (در 25 ژوئن 2020 قابل دسترسی است).
- کلاین، ال. ماریانو، اف. آلبرشت، سی. فرایتاگ، م. لو، اس. هندز، ن. شائو، ایکس. رودریگز، اس. Hamann, H. Pairs: یک پلت فرم تجزیه و تحلیل داده های جغرافیایی-مکانی مقیاس پذیر. در مجموعه مقالات کنفرانس بین المللی IEEE در سال 2015 درباره داده های بزرگ (داده های بزرگ)، سانتا کلارا، کالیفرنیا، ایالات متحده آمریکا، 29 اکتبر تا 1 نوامبر 2015؛ ص 1290–1298. [ Google Scholar ] [ CrossRef ]
- لو، اس. فرایتاگ، م. کلاین، ال جی; رنویک، جی. ماریانو، اف جی؛ آلبرشت، سی ام. Hamann، HF IBM Pairs سرپرستی خدمات کلان داده برای تجزیه و تحلیل و کشف داده های مکانی شتابان. در مجموعه مقالات کنفرانس بین المللی IEEE در سال 2016 درباره داده های بزرگ (داده های بزرگ)، واشنگتن، دی سی، ایالات متحده آمریکا، 5 تا 8 دسامبر 2016؛ پ. 2672. [ Google Scholar ] [ CrossRef ]
- آلبرشت، سی ام. بابروف، ن. المگرین، بی. فرایتاگ، م. هامان، HF; خبیبرخمانوف، آی. کلاین، ال. لو، اس. ماریانو، اف. اشمود، جی. و همکاران جفت (دوباره) بارگذاری شده: طراحی سیستم و محک زدن برای کاربردهای جغرافیایی مقیاس پذیر. مجموعه مقالات ISPRS Annals 2020 ، در دست چاپ است. [ Google Scholar ]
- فچر، آر. Whitby، MA بهینه سازی تجزیه و تحلیل مکانی-زمانی با استفاده از نمایه سازی چند بعدی با GeoWave. در مجموعه مقالات کنفرانس نرم افزار رایگان و متن باز برای زمین فضایی (FOSS4G)، حیدرآباد، هند، 26-29 ژانویه 2017. جلد 17، ص. 10. [ Google Scholar ] [ CrossRef ]
- هیوز، JN; پیوست، الف. Eichelberger، CN; فاکس، ا. هالبرت، ا. Ronquest، M. Geomesa: A Distributed Architecture for Spatio-Temporal Fusion. در مجموعه مقالات PIE 9473، انفورماتیک جغرافیایی، فیوژن، و تجزیه و تحلیل ویدیوی حرکتی V، بالتیمور، MD، ایالات متحده آمریکا، 20-24 آوریل 2015. SPIE: Bellingham، WA، USA، 2015. [ Google Scholar ]
- ویتمن، RT; پارک، مگابایت؛ Ambrose، SM; Hoel، EG نمایه سازی فضایی و تجزیه و تحلیل در Hadoop. در مجموعه مقالات بیست و دومین کنفرانس بین المللی ACM SIGSPATIAL در مورد پیشرفت در سیستم های اطلاعات جغرافیایی، دالاس، تگزاس، ایالات متحده آمریکا، 4 تا 7 نوامبر 2014. انجمن ماشینهای محاسباتی: نیویورک، نیویورک، ایالات متحده آمریکا، 2014. [ Google Scholar ]
- آلبرشت، سی ام. فیشر، سی. فرایتاگ، م. هامان، HF; پانکانتی، اس. پزوتی، اف. Rossi, F. یادگیری و شناخت ویژگی های باستان شناسی از داده های LiDAR. در مجموعه مقالات کنفرانس بینالمللی IEEE 2019 درباره دادههای بزرگ (دادههای بزرگ)، لسآنجلس، کالیفرنیا، ایالات متحده آمریکا، 9 تا 12 دسامبر 2019؛ صص 5630–5636. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کلاین، ال جی; آلبرشت، سی ام. ژو، دبلیو. زیبنشوه، سی. پانکانتی، اس. هامان، HF; Lu, S. دادههای جغرافیایی و تجزیه و تحلیل N-بعدی برای ارزیابی ریسک زیرساختهای حیاتی. در مجموعه مقالات کنفرانس بینالمللی IEEE 2019 درباره دادههای بزرگ (دادههای بزرگ)، لسآنجلس، کالیفرنیا، ایالات متحده آمریکا، 9 تا 12 دسامبر 2019؛ صص 5637–5643. [ Google Scholar ] [ CrossRef ]
- المگرین، بی. آلبرشت، سی. هامان، اچ. کلاین، ال. لو، اس. Schmude, J. Physical Analytics یکپارچه مخزن و خدمات برای نجوم: جفت-A. گاو نر صبح. اختر. Soc. 2019 ، 51 ، 28. [ Google Scholar ]
- Vora، MN Hadoop-HBase برای داده های مقیاس بزرگ. در مجموعه مقالات کنفرانس بین المللی علوم کامپیوتر و فناوری شبکه در سال 2011، هاربین، چین، 24 تا 26 دسامبر 2011. جلد 1، ص 601–605. [ Google Scholar ] [ CrossRef ]
- صفحه اصلی—مرجع فضایی. در دسترس آنلاین: https://spatialreference.org/ (دسترسی در 25 ژوئن 2020).
- Janssen, V. درک سیستم های مرجع مختصات، داده ها و تبدیل ها. بین المللی J. Geoinform. 2009 ، 5 ، 41-53. [ Google Scholar ]
- سامت، اچ. چهار درخت و ساختارهای داده سلسله مراتبی مرتبط. کامپیوتر ACM. Surv. 1984 ، 16 ، 187-260. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دروش، ام. دل بلو، U. کارلیر، اس. کالین، او. فرناندز، وی. گاسکون، اف. هورش، بی. ایزولا، سی. لابرینتی، پ. مارتیمورت، پی. و همکاران Sentinel-2: ماموریت نوری با وضوح بالا ESA برای خدمات عملیاتی GMES. از راه دور. حس محیط. 2012 ، 120 ، 25-36. [ Google Scholar ] [ CrossRef ]
- روی، DP; Wulder، MA; لاول، TR; Woodcock، CE; آلن، آر جی. اندرسون، ام سی؛ هلدر، دی. آیرونز، جی آر. جانسون، دی.م. کندی، آر. و همکاران Landsat-8: علم و چشم انداز محصول برای تحقیقات تغییرات جهانی زمینی. از راه دور. حس محیط. 2014 ، 145 ، 154-172. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- صفحه وب ماموریت لندست. در دسترس آنلاین: https://www.usgs.gov/land-resources/nli/landsat/landsat-satellite-missions (در 25 ژوئن 2020 قابل دسترسی است).
- صفحه وب ماموریت ترا در دسترس آنلاین: https://terra.nasa.gov/about/mission (در 25 ژوئن 2020 قابل دسترسی است).
- صفحه وب ماموریت Sentinel-2. در دسترس آنلاین: https://sentinel.esa.int/web/sentinel/missions/sentinel-2 (در 25 ژوئن 2020 قابل دسترسی است).
- لیم، ک. تریتز، پی. ولدر، ام. سنت اونگه، بی. سیل، M. LiDAR سنجش از دور ساختار جنگل. Prog. فیزیک Geogr. 2003 ، 27 ، 88-106. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- منگ، ایکس. کریت، ن. ژائو، ک. الگوریتم های فیلتر زمینی برای داده های هوابرد LiDAR: مروری بر مسائل مهم. از راه دور. Sens. 2010 , 2 , 833-860. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Soergel, U. (Ed.) Radar Remote Sensing of Urban Areas , 1st ed.; سری کتاب: سنجش از دور و پردازش تصویر دیجیتال. Springer: Heidelberg، آلمان، 2010. [ Google Scholar ] [ CrossRef ]
- Ouchi، K. روند اخیر و پیشرفت رادار دیافراگم مصنوعی با موضوعات انتخاب شده. از راه دور. Sens. 2013 , 5 , 716-807. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Naip Data in Box. در دسترس آنلاین: https://nrcs.app.box.com/v/naip (در 25 ژوئن 2020 قابل دسترسی است).
- USGS EROS Archive—Aerial Photography—National Agriculture Imagery Program (NAIP). در دسترس آنلاین: https://doi.org/10.5066/F7QN651G (در 28 ژوئن 2020 قابل دسترسی است).
- سرور کاشی آزمایشگاه WMF: “OSM بدون برچسب”. در دسترس آنلاین: https://tiles.wmflabs.org/osm-no-labels/ (دسترسی در 25 ژوئن 2020).
- سرور OSM: “کاشی هایی با برچسب”. در دسترس آنلاین: https://tile.openstreetmap.de/ (در 25 ژوئن 2020 قابل دسترسی است).
- رضاتوفیقی، ح. تسوی، ن. گواک، جی. صادقیان، ع. رید، آی. Savarese، S. تقاطع تعمیم یافته بر روی اتحاد: یک متریک و یک ضرر برای رگرسیون جعبه محدود. در مجموعه مقالات کنفرانس IEEE/CVF 2019 در مورد بینایی کامپیوتری و تشخیص الگو (CVPR)، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 16 تا 20 ژوئن 2019؛ صص 658-666. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Pytorch/Pytorch. در دسترس آنلاین: https://github.com/pytorch/pytorch (در 25 ژوئن 2020 قابل دسترسی است).
- کیلومتری Milesial/Pytorch-UNet. در دسترس آنلاین: https://github.com/milesial/Pytorch-UNet (در 25 ژوئن 2020 قابل دسترسی است).
- Zhu، JY Junyanz/Pytorch-CycleGAN-and-Pix2pix. در دسترس آنلاین: https://github.com/junyanz/pytorch-CycleGAN-and-pix2pix (در 25 ژوئن 2020 قابل دسترسی است).
- مپنیک/مپنیک. در دسترس آنلاین: https://github.com/mapnik/mapnik (در 25 ژوئن 2020 قابل دسترسی است).
- IBM/Ibmpairs. در دسترس آنلاین: https://github.com/IBM/ibmpairs (در 25 ژوئن 2020 قابل دسترسی است).
- IBM Pairs — آموزش. در دسترس آنلاین: https://pairs.res.ibm.com/tutorial/ (در 25 ژوئن 2020 قابل دسترسی است).
- چو، سی. ژموگینوف، آ. سندلر، M. CycleGAN، استاد استگانوگرافی. arXiv 2017 , arXiv:1712.02950. [ Google Scholar ]
- دنگ، ج. دونگ، دبلیو. سوچر، آر. لی، ال جی; لی، ک. لی، F.-F. ImageNet: پایگاه داده تصویر سلسله مراتبی در مقیاس بزرگ. در مجموعه مقالات کنفرانس IEEE/CVF 2019 در مورد بینایی کامپیوتری و تشخیص الگو (CVPR)، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 16 تا 20 ژوئن 2019؛ صص 248-255. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ImageNet. در دسترس آنلاین: https://www.image-net.org/ (در 25 ژوئن 2020 قابل دسترسی است).
- ون اتن، ا. لیندنباوم، دی. Bacastow، TM SpaceNet: مجموعه داده سنجش از راه دور و سری چالش. arXiv 2018 , arXiv:1807.01232. [ Google Scholar ]
- SpaceNet. در دسترس آنلاین: https://spacenetchallenge.github.io/ (در 25 ژوئن 2020 قابل دسترسی است).
- راه حل برنده برای چالش Spacenet: یادگیری مشترک با OpenStreetMap. در دسترس آنلاین: https://i.ho.lc/winning-solution-for-the-spacenet-challenge-joint-learning-with-openstreetmap.html (در 25 ژوئن 2020 قابل دسترسی است).
- قدرت ها، ارزیابی DM : از دقت، یادآوری و اندازه گیری F تا ROC، اطلاعات، نشانه گذاری و همبستگی . انتشارات Bioinfo: پونا، هند، 2011. [ Google Scholar ]
- پان، SJ; یانگ، کیو. نظرسنجی در مورد یادگیری انتقالی. IEEE Trans. دانستن مهندسی داده 2009 ، 22 ، 1345-1359. [ Google Scholar ] [ CrossRef ]
- لو، جی. بهبود، وی. هائو، پی. زو، اچ. ژو، اس. ژانگ، جی. انتقال یادگیری با استفاده از هوش محاسباتی: یک بررسی. دانستن سیستم مبتنی بر 2015 ، 80 ، 14-23. [ Google Scholar ] [ CrossRef ]
- ویس، ک. خوش گفتار، TM; وانگ، دی. بررسی یادگیری انتقالی. IEEE Trans. دانستن مهندسی داده 2009 ، 3 ، 9. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لین، جی. جیانگ، ز. سرکاریا، س. ما، دی. Zhao، Y. موضوع ویژه آموزش انتقال عمیق برای سنجش از راه دور. سنجش از دور (ژورنال). در دسترس آنلاین: https://www.mdpi.com/journal/remotesensing/special_issues/DeepTransfer_Learning (در 28 ژوئن 2020 قابل دسترسی است).
- زی، ام. ژان، ن. بورک، ام. لوبل، دی. ارمون، اس. انتقال یادگیری از ویژگی های عمیق برای سنجش از راه دور و نقشه برداری فقر. در مجموعه مقالات AAAI 2016: سی امین کنفرانس AAAI در مورد هوش مصنوعی، فینیکس، AZ، ایالات متحده آمریکا، 12 تا 17 فوریه 2016. پ. 7. [ Google Scholar ]
- هوانگ، ز. پان، ز. Lei, B. انتقال یادگیری با شبکه عصبی پیچیده عمیق برای طبقهبندی هدف SAR با دادههای برچسبگذاری شده محدود. از راه دور. Sens. 2017 , 9 , 907. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لیان، ایکس. ژانگ، سی. ژانگ، اچ. Hsieh, CJ; ژانگ، دبلیو. لیو، جی. آیا الگوریتم های غیرمتمرکز از الگوریتم های متمرکز بهتر عمل می کنند؟ مطالعه موردی برای نزول گرادیان تصادفی غیرمتمرکز موازی. در پیشرفت در سیستم های پردازش اطلاعات عصبی 30 ; Guyon, I., Luxburg, UV, Bengio, S., Wallach, H., Fergus, R., Vishwanathan, S., Garnett, R., Eds. Curran Associates, Inc.: Red Hook, NY, USA, 2017; صص 5330–5340. [ Google Scholar ]
- ژانگ، دبلیو. کوی، ایکس. کی، ع. لیو، ام. فینکلر، یو. کینگزبری، بی. ساون، جی. مروئه، ی. بویوکتوسون اوغلو، ع. داس، پ. و همکاران بهبود کارایی در آموزش های غیرمتمرکز توزیع شده در مقیاس بزرگ. در مجموعه مقالات کنفرانس بین المللی ICASSP 2020 IEEE در مورد آکوستیک، پردازش گفتار و سیگنال (ICASSP)، بارسلون، اسپانیا، 4 تا 8 مه 2020. [ Google Scholar ]
- نقشه های بینگ در دسترس آنلاین: https://www.bing.com/maps (در 25 ژوئن 2020 قابل دسترسی است).
- ژانگ، آر. آلبرشت، سی ام. فرایتاگ، م. لو، اس. ژانگ، دبلیو. فینکلر، یو. کونگ، دی اس؛ Cui، X. سیستم و روششناسی برای تصحیح ویژگیهای نقشه با استفاده از سنجش از راه دور و یادگیری عمیق. ثبت اختراع ایالات متحده درخواست ارسال شده، در دست بررسی
- کلاین، ال جی; لو، اس. آلبرشت، سی ام. ماریانو، اف جی؛ هامان، روش HF و سیستم برای شناسایی محصول و تعیین مرز. پتنت ایالات متحده 10445877B2، 15 اکتبر 2019. [ Google Scholar ]
- کلاین، ال. ماریانو، اف جی؛ فرایتاگ، م. هامان، HF; رودریگز، SB پرس و جوی موازی از پایگاه داده مکانی با وضوح قابل تنظیم. پتنت ایالات متحده 10372705B2، 6 اوت 2019. [ Google Scholar ]
- فرایتاگ، م. آلبرشت، سی ام. ماریانو، اف جی؛ لو، اس. هامان، HF; Schmude، JW Efficient Querying با استفاده از لایه های اجمالی داده های مکانی-زمانی در بستر تجزیه و تحلیل داده ها. پتنت ایالات متحده P201805207، 14 مه 2020. [ Google Scholar ]
- Mapnik.Org- هسته تجسم و پردازش جغرافیایی. در دسترس آنلاین: https://mapnik.org/ (در 25 ژوئن 2020 قابل دسترسی است).
- تیم خدمات ابری ویکیمدیا. در دسترس آنلاین: https://www.mediawiki.org/wiki/Wikimedia_Cloud_Services_team (در 25 ژوئن 2020 قابل دسترسی است).
- بوتو، ال. کورتیس، FE; Nocedal، J. روشهای بهینهسازی برای یادگیری ماشینی در مقیاس بزرگ. Siam Rev. 2018 , 60 , 223–311. [ Google Scholar ] [ CrossRef ]
- نوانکپا، سی. ایجوما، دبلیو. گچاگان، ع. مارشال، اس. توابع فعال سازی: مقایسه روندها در عمل و تحقیق برای یادگیری عمیق. arXiv 2018 , arXiv:1811.03378. [ Google Scholar ]
- شی، دبلیو. کابالرو، جی. تیس، ال. هوزار، اف. آیتکن، آ. لدیگ، سی. Wang, Z. آیا لایه دکانولوشن مانند لایه کانولوشن است؟ arXiv 2016 , arXiv:1609.07009. [ Google Scholar ]
- Kingma، DP; Welling، M. مقدمه ای بر رمزگذارهای خودکار متغیر. arXiv 2019 ، arXiv:1906.02691. [ Google Scholar ] [ CrossRef ]
- کوراچ، ک. لوچیچ، م. ژای، ایکس. میچالسکی، م. Gelly، S. یک مطالعه در مقیاس بزرگ در مورد منظم سازی و عادی سازی در GAN ها. در مجموعه مقالات کنفرانس بین المللی یادگیری ماشین، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 9 تا 15 ژوئن 2019. [ Google Scholar ]
- هینتون، جنرال الکتریک؛ سریواستاوا، ن. کریژفسکی، آ. سوتسکور، آی. Salakhutdinov، RR بهبود شبکه های عصبی با جلوگیری از سازگاری مشترک آشکارسازهای ویژگی. arXiv 2012 ، arXiv:1207.0580. [ Google Scholar ]
- آیوف، اس. Szegedy, C. Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift. arXiv 2015 ، arXiv:1502.03167. [ Google Scholar ]
- بنژیو، ی. لورادور، ج. کولوبرت، آر. وستون، جی. یادگیری برنامه درسی. در مجموعه مقالات بیست و ششمین کنفرانس بین المللی سالانه یادگیری ماشین – ICML ’09، مونترال، QC، کانادا، 14 تا 18 ژوئن 2009. صص 1-8. [ Google Scholar ] [ CrossRef ]
- پاریسی، GI; کمکر، آر. قسمت، JL; کنان، سی. Wermter, S. یادگیری مستمر مادام العمر با شبکه های عصبی: مروری. شبکه عصبی 2019 ، 113 ، 54–71. [ Google Scholar ] [ CrossRef ] [ PubMed ]


بدون دیدگاه