

خلاصه
کلید واژه ها:
تشخیص لبه ؛ ابر نقطه ; مهندسی معکوس ; اسپلاین ; صنعت 4.0 ; اسکن سه بعدی ؛ مدل سه بعدی
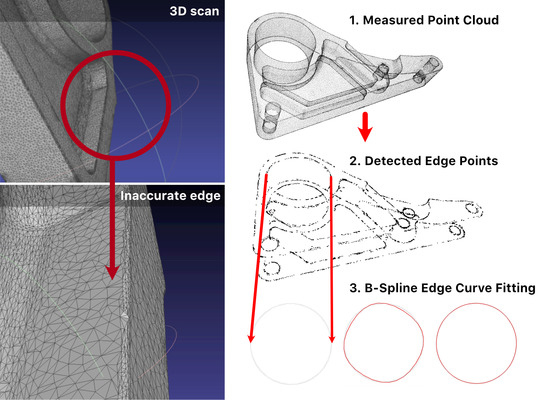
چکیده گرافیکی
1. معرفی
کار قبلی
2. روش ها و مواد
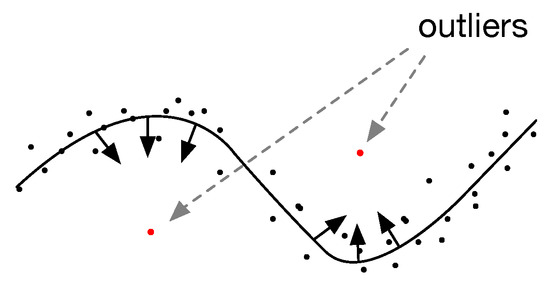
2.1. تشخیص نقاط لبه
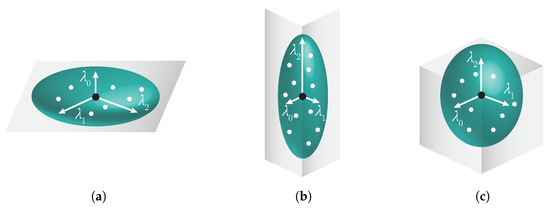
2.1.1. PCA – تخمین عادی
اولین مرحله در الگوریتم PCA، محاسبه ماتریس کوواریانس C برای هر نقطه P در ابر نقطه است.
جایی که پ¯مرکز k -نزدیکترین نقاط همسایگی است پمن،من=1،2،⋯کاز یک نقطه P مقادیر ویژه ( λ0،λ1،λ2) و بردارهای ویژه ( v1→،v→2،v→3) از این ماتریس بیضی کوواریانس را تعریف می کند . ما بین این سه مورد تمایز قائل می شویم:
-
(λ0≤λ1≤λ2)∧(λ1≈λ2)
-
(λ0≤λ1≤λ2)∧(λ0≈λ1)
-
(λ0≤λ1≤λ2)∧(λ0≈λ1≈λ2).
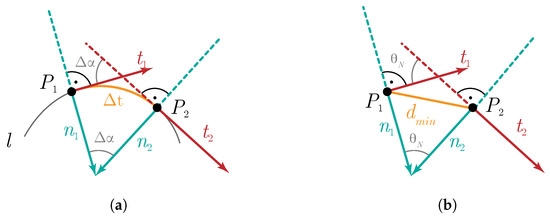
2.1.2. منطقه در حال رشد – مقدار آستانه نرمال اولیه تیساعتrθن
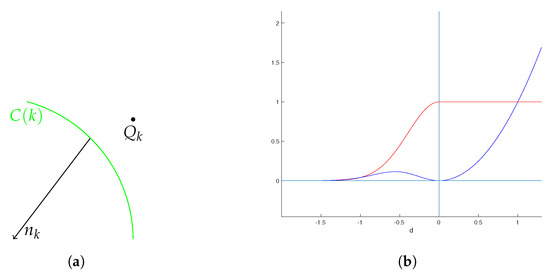
شکل 4 a تعریف انحنا را نشان می دهد θاز منحنی l در نقطه پ1. در حد به عنوان Δتی→0، ما بدست می آوریم:
در مورد ابر نقطه، پارامتر را در نظر می گیریم Δتیبه عنوان حداقل فاصله دمترمنnخط بین دو نقطه مجاور ( شکل 4 ب). انحنا θسیمحاسبه می شود
ما الگوریتم رشد منطقه را روی مجموعه داده های خود با پارامترها اعمال کردیم تیساعتrθنو تعداد نقاط حذف شده را محاسبه کردیم noتوتی. درصد امتیاز باقیمانده به صورت زیر تعریف می شود:
متوجه می شویم که وابستگی بین تیساعتrθنو پهrجندارای پیشرفت لگاریتمی است، رگرسیون لگاریتمی بهترین انتخاب برای محاسبه وابستگی است:
تیساعتrθن=ب1لوگاریتم(پهrجن)+ب0،ب0،ب1∈آر.
2.2. B-Spline Edge Representation
اتصالات B-spline متعلق به ابزارهای مورد علاقه برای پردازش مجموعه ای از نقاط داده سازماندهی نشده و احتمالاً پر سر و صدا در گرافیک کامپیوتری، بینایی کامپیوتر و CAD/CAM است. مزیت اصلی تقریب B-spline بر اساس فرمول شناخته شده B-spline است [ 48 ]:
سی(تو)=∑من=0nبمن،پ(تو)پمن،
جایی که بمن،پ(تو)تابع پایه B-spline درجه p با نقاط کنترل است پمن. پارامتر u از بازه گره غیر تناوبی و غیر یکنواخت است تو=<تو0،تو1،…،توn+پ+1>. تنظیم کردیم تو0=0و توn+پ+1=1.
اجازه دهید {سک}ک=0مترمجموعه نقاط ورودی باشد. الگوریتم برازش نقاط کنترل را جستجو می کند پمن، وکتور گره تومنحنی spline تعریف شده در رابطه ( 6 ) و همچنین پارامترها تو^={تو^ک}ک=0مترکه معادله را برآورده کرد:
سک=∑من=0nبمن،پ(تو^ک)پمن
و سی(تو0)=سی(0)=س0، سی(توn+پ+1)=سی(1)=سمتر.
ابتدا شکل منحنی اولیه را محاسبه می کنیم. نویسندگان در [ 44 ] با دایره اولیه (مرکز دایره در میانگین ابر نقطه، شعاع حداکثر فاصله یک نقطه تا مرکز است) یا یک بیضی کار می کنند که محورهای اصلی توسط PCA محاسبه می شوند. ما با روش پرکاربرد وتر و مرکزگرا شروع می کنیم. روش آکوردال پارامترها را به صورت زیر محاسبه می کند:
تو^0=0;تو^متر=1;تو^ک=تو^ک-1+|سک-سک-1|د
جایی که د=∑ک=1متر|سک-سک-1|. روش گریز از مرکز مشابه است، ما فقط جذر طول خط را اضافه می کنیم. روش گریز از مرکز در مواردی که داده ها چرخش های تند داشته باشند، مرتبط تر است.
در مرحله دوم، بردار گره را تنظیم می کنیم توبا این شرط که هر دهانه گره حداقل دارای یک گره باشد تو^ک.دهانه های گره داخلی با [ 49 ] تعریف می شوند:
من=fلoor(jد)،α=jد-من،توپ+j=(1-α)تو^من-1+αتو^من،j=1،…،n-پ
و عملکرد fلoorبزرگترین عدد صحیح است من≤jد.
پس از آن، مختصات نقاط کنترل پمنبا تکنیک استاندارد برازش حداقل مربعات خطی [ 48 ] تقریب میشوند. ما تابع را کوچک می کنیم:
f=|∑ک=1متر-1سک-سی(تو^ک)|2
ما می توانیم راه حل را به صورت ماتریسی (سیستم از n-1×n-1معادلات) به صورت:
(بتیب)پ=آر
که در آن ماتریس B B نشان دهنده تابع B-spline درجه p است که برای همه ارزیابی شده است تو^ک، ک=1،…،n-1. ماتریس پنقاط کنترل و بردار مورد نظر هستند آربردار است n-1نکته ها:
آر=∑ک=1متر-1ب1،پ(تو^ک)آرک⋮∑ک=1متر-1بn-1،پ(تو^ک)آرک
و
آرک=سک-ب0،پ(تو^ک)س0-بn،پ(تو^ک)سمتر،ک=1،…،متر-1.
ما باید در طول فرآیند تکرار با مشکل اصلی برخورد کنیم: انتخاب اندازه گیری فاصله تا تعیین خطا. فرمولبندی مسئله ساده است، ما نقاط داده سازمانیافته (در مورد ما نقاط لبه احتمالی) با توزیع غیریکنواخت با نویز قابلتوجه داریم. این مسئله را می توان به عنوان یک مسئله بهینه سازی غیرخطی فرموله کرد. با توجه به نقاط ورودی {سک}ک=0متر، می خواهیم نقاط کنترل را محاسبه کنیم پمنکه یک تابع هدف کلی را به حداقل می رساند [ 44 ]:
f=12∑ک=1nد2(پ(تو)،سک)+λfس
فاصله دکفاصله علامت گذاری شده نقطه است سکو نزدیکترین نقطه در منحنی B-spline محاسبه شده. دکاگر نکته مثبت باشد سکدر همان سمت معمولی است nک– شکل 7 الف را ببینید. این اصطلاح خطا عبارت است از:
wφ(دک)=1φ+φ-دک2σ2برایدک<01برایدک≥0
ک=0،1،2⋯،متر، جایی که σعرض انتقال تابع وزن را با توجه به فاصله علامت گذاری شده تعریف می کند. ارزش φنسبت طلایی است 1.61803398875.تابع هدف یک شکل دارد:
fφ=∑ک=0مترwφ(دک)دک2،
خطای نامتقارن قسمت هایی را که دقت منحنی در آنها کافی نیست تشخیص می دهد. بهبود با درج گره موضعی انجام می شود. ما پارامتر را می دانیم تو¯کاز نزدیکترین نقطه منحنی سی(توک¯)برای هر سک.بنابراین، ما همه گره ها را وارد می کنیم توک¯در قسمت های ناکافی و با استفاده از طرح درج گره، منحنی را دوباره محاسبه کنید. اگر توک¯∈<توک،توک+1)، سپس نقاط کنترل جدید پ¯منهستند:
پ¯من=βمنپمن+(1-βمن)پمن-1
جایی که
βمن=تو¯ک-تومنتومن+پ-تومنبرایک-پ+1≤من≤ک1برایمن≤ک-پ0برایمن≥ک+1
3. نتایج و بحث
3.1. تخمین آستانه نرمال تیساعتrθن
ما الگوریتم رشد منطقه را روی مجموعه داده های خود با پارامترهای اولیه اعمال کردیم تیساعتrθن∈ن، تیساعتrθن=1،…،15و تعداد نقاط حذف شده را پیدا می کنیم noتوتی. درصد امتیازات باقیمانده به صورت زیر محاسبه می شود:
پهrجن=noتوتیnمنn·100.
ما می خواهیم بهترین مقدار ورودی ممکن را تعیین کنیم تیساعتrθنکه برای ابرهای نقطه مشترک مدل های مهندسی قابل استفاده است. ما با معادله رگرسیون متوسط (میانگین معادلات جدول A2 ) شروع می کنیم:
θاستی≈آر(ایکس)=-2.45·لوگاریتم(ایکس)+6.06.
مقدار بهینه از پهrجبه طور تجربی 1-6٪ تنظیم شده است. بنابراین، ارزش های تیساعتrθندر فاصله هستند 〈آر(1)،آر(6)〉. بدیهی است که دریافت می کنیم:
آر(1)=-2.45·لوگاریتم(1)+6.06≤θاستی≤-2.45·لوگاریتم(6)+6.06=آر(6)6.06≤θاستی≤1.67.
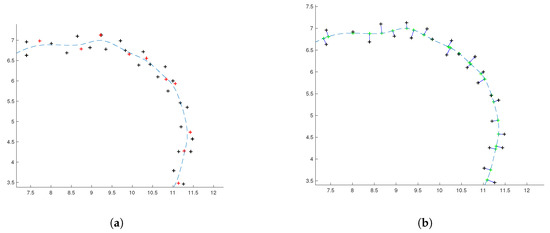
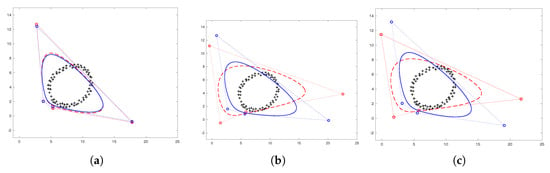
3.2. فیتینگ منحنی B-Spline
مجموعه نقاط منحنی با استفاده از اتصالات منحنی B-spline ارائه شده با درج گره تطبیقی آزمایش شد. دشوارترین بخش تنظیم بهینه محاسبه خطا بود – چگونه می توان کیفیت تقریب را در صورتی که شکل صحیح را ندانیم اندازه گیری کرد. روش رایج محاسبه خطا با فاصله نقطه ای کار می کند که استحکام را ارائه می دهد. فاصله مماس [ 50 ] همگرایی بسیار سریعتری را فراهم می کند. فاصله مجذور با وزن دهی نامتقارن [ 44 ، 51 ] از هر دو سود می برد و یک روش پایدار را انجام می دهد. ما از وزن دهی نامتقارن استفاده کردیم، اما یک ارزیابی جدید از خطای نامتقارن پیشنهاد کردیم:
fφ،ک2=wφ،ک(دک)دک2،جایی کهwφ(دک):=1φ+φ-دک2σ2برایدک<01برایدک≥0
ک=0،1،2⋯،متر،
4. نتیجه گیری
اختصارات
در این نسخه از اختصارات زیر استفاده شده است:
| RP | نمونه سازی سریع |
| RE | مهندسی معکوس |
| CAD | طراحی به کمک رایانه |
| PCA | تجزیه و تحلیل مؤلفه های اصلی |
| STL | زبان استاندارد Tessellation |
| NURBS | غیر یکنواخت منطقی B-spline |
پیوست اول

منابع
- دیویس، جی. ادگار، تی. پورتر، جی. برنادن، جی. سارلی، م. ساخت هوشمند، هوشمندی ساخت و عملکرد پویای تقاضا. محاسبه کنید. شیمی. مهندس 2012 ، 47 ، 145-156. [ Google Scholar ] [ CrossRef ]
- وایدیا، س. امباد، پ. Bhosle, S. Industry 4.0—A Glimpse. Procedia Manuf. 2018 ، 20 ، 233-238. [ Google Scholar ] [ CrossRef ]
- چوآ، CK; لئونگ، KF; Lim, CS Rapid Prototyping: Principles and Applications. در نمونه سازی سریع: اصول و کاربرد . انتشارات علمی جهانی: سنگاپور، 2010. [ Google Scholar ]
- کیو، ی. ژو، ایکس. Qian, X. برش مستقیم داده های ابری با توپولوژی تضمین شده برای نمونه سازی سریع. بین المللی J. Adv. Manuf. تکنولوژی 2011 ، 53 ، 255-265. [ Google Scholar ] [ CrossRef ]
- لیوسو، ام. الرو، اس. مارتینز، جی. لوفور، اس. Attene, M. از مدل های سه بعدی تا چاپ های سه بعدی: مروری بر خط لوله پردازش. محاسبه کنید. نمودار. انجمن 2017 ، 36 ، 1-24. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- چوی، S.-H. Samavedam, S. مدل سازی و بهینه سازی نمونه سازی سریع. محاسبه کنید. Ind. 2002 , 47 , 39-53. [ Google Scholar ] [ CrossRef ]
- سن، SK; آگاروال، RP نسبت طلایی در علم، به عنوان منبع توالی تصادفی، محاسبه آن و فراتر از آن. جی. کامپیوتر. ریاضی. Appl. 2008 ، 56 ، 469-498. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- جاویدراد، ر. Pourmoayed، بازسازی منحنی Contour AR از داده های ابری برای نمونه سازی سریع. ربات. محاسبه کنید. یکپارچه سازی Manuf. 2011 ، 27 ، 397-404. [ Google Scholar ] [ CrossRef ]
- گریلی، ای. منا، اف. Remondino، F. مروری بر الگوریتم های تقسیم بندی و طبقه بندی ابرهای نقطه ای. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2017 ، XLII-2/W3 ، 339–344. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- نگوین، ا. Le, B. تقسیم بندی ابر نقطه سه بعدی: یک بررسی. در مجموعه مقالات ششمین کنفرانس IEEE در مورد رباتیک، اتوماسیون و مکاترونیک (RAM)، مانیل، فیلیپین، 12-15 نوامبر 2013. ص 225-230. [ Google Scholar ]
- بسل، پی جی؛ جین، تقسیم بندی RC از طریق برازش سطحی با مرتبه متغیر. IEEE Trans. الگوی مقعدی ماخ هوشمند قوس. 1988 ، 10 ، 167-192. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- نهار، م. علی سوجان رحمان، م. بهبود الگوریتم رشد منطقه تک دانه در تقسیم بندی تصویر. گلوب. جی. کامپیوتر. علمی تکنولوژی 2018 ، 18 ، 15-22. [ Google Scholar ]
- آدامز، آر. Bischof، L. منطقه بذر در حال رشد. IEEE Trans. الگوی مقعدی ماخ هوشمند قوس. 1994 ، 6 ، 641-647. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وانگ، ایکس. زوآ، ال. شینا، ایکس. رنا، ی. Qina، Y. یک رویکرد در حال رشد منطقه برای استخراج خودکار شکستگی رخنمون از یک ابر نقطه سه بعدی. محاسبه کنید. Geosci. 2017 ، 99 ، 100-106. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- خو، جی. ژو، ام. وو، زی. شوی، دبلیو. Ali, S. جداسازی سطحی قوی و استخراج خطوط لبه از قطعات شکسته شده آثار. جی. کامپیوتر. دس مهندس 2015 ، 2 ، 79-87. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Vo، AV; تروونگ-هنگ، ال. Laefer، DF; منطقه برتولتو، M. Octree در حال رشد برای تقسیمبندی ابر نقطهای. ISPRS J. Photogramm. Remote Sens. 2015 ، 104 ، 88-100. [ Google Scholar ] [ CrossRef ]
- نی، اچ. لین، ایکس. نینگ، ایکس. Zhang، J. تشخیص لبه و ردیابی خط ویژگی در ابرهای نقطه سه بعدی با تجزیه و تحلیل ویژگی های هندسی. Remote Sens. 2016 , 8 , 710. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دماریس، ک. واندرستریتن، دی. ولودین، تی. Roose, D. تشخیص لبه های تیز بسته در ابرهای نقطه ای با استفاده از تخمین عادی و نظریه گراف. محاسبه کنید. به دس کمک کرد. 2007 ، 39 ، 267-283. [ Google Scholar ]
- جیانگ، XY; بونک، اچ. Meier، U. بخش بندی تصویر با برد سریع با استفاده از تقسیم بندی های ابتدایی سطح بالا. در مجموعه مقالات سومین کارگاه آموزشی IEEE در مورد کاربردهای بینایی کامپیوتری، ساراسوتا، FL، ایالات متحده آمریکا، 2 تا 4 دسامبر 1996. صص 83-88. [ Google Scholar ]
- اشنابل، آر. وال، آر. Klein, R. Efficent Ransac برای تشخیص شکل ابر نقطه ای. محاسبه کنید. نمودار. انجمن 2007 ، 26 ، 214-226. [ Google Scholar ] [ CrossRef ]
- برگر، ام. تالیاساکی، آ. Seversky، LM; آلیز، پی. Guennebaud، G. لوین، جی. سیلوا، سی تی بررسی بازسازی سطح از ابرهای نقطه ای. محاسبه کنید. انجمن نمودار 2016 ، 36 ، 301-329. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لافارژ، اف. Alliez, P. بازسازی سطح از طریق ساختار مجموعه نقطه. در انجمن گرافیک کامپیوتری ; Benes, B., Chen, M., Eds. وایلی: نیویورک، نیویورک، ایالات متحده آمریکا، 2013; ص 225-234. [ Google Scholar ]
- وانگ، ام. جو، م. فن، ی. گوا، اس. لیائو، م. یانگ، اچ. Komura, T. بازسازی 3 بعدی سطوح ابر نقطه ای ناقص با تقسیم بندی و بهبود ویژگی ها. دسترسی IEEE 2019 ، 7 ، 15272–15281. [ Google Scholar ] [ CrossRef ]
- یین، ک. هوانگ، اچ. ژانگ، اچ. گونگ، ام. کوهن-اور، دی. Chen, B. Morfit: بازسازی سطح تعاملی از ابرهای نقطه ناقص با توپولوژی منحنی محور و کنترل هندسه. ACM Trans. نمودار. 2014 ، 33 ، 202. [ Google Scholar ] [ CrossRef ]
- هیلدبرانت، ک. پولثیر، ک. Wardetzky، M. Smooth دارای خطوط روی مش های سطحی است. در سمپوزیوم Eurographics در مورد پردازش هندسه ; Desbrun, M., Pottmann, H., Eds. انجمن Eurographics: Aire-la-Ville، سوئیس، 2005; صص 85-90. [ Google Scholar ]
- اوتاکه، ی. Belyaev, A. تشخیص خودکار برآمدگی ها و دره های ژئودزیکی در سطح چند ضلعی. جی سه بعدی. تصاویر 2001 ، 15 ، 127-132. [ Google Scholar ]
- استیلیانو، جی. استخراج خطوط Farin، G. Crest از مش های سه بعدی. در روش های سلسله مراتبی و هندسی در تجسم علمی ; Farin, G., Hamann, B., Hagen, H., Eds. Springer: برلین، آلمان، 2003; صص 69-81. [ Google Scholar ]
- توتونی، س. دسوزا، ا. دونوان، آر. رائو، پی کی; کنگ، ز. Borgesen, P. طبقهبندی تغییرات ابعادی در قطعات ساخته شده افزودنی از دادههای ابر نقطهای سه بعدی اسکن شده با لیزر با استفاده از رویکردهای یادگیری ماشین. J. Manuf. علمی مهندس 2017 ، 139 ، 142-149. [ Google Scholar ]
- بنیر، آر. ساب سول، جی. گسکایر، جی. لو برتون، اف. Puech, W. فرآیند جامع مهندسی معکوس از مش های سه بعدی تا مدل های CAD. محاسبه کنید. به دس کمک کرد. 2013 ، 45 ، 1382–1393. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژانگ، ز. Sanjay, J. یک الگوریتم برش بهبود یافته با ساخت کانتور کارآمد با استفاده از فایل های STL. بین المللی J. Adv. Manuf. تکنولوژی 2015 ، 80 ، 1347–1362. [ Google Scholar ] [ CrossRef ]
- ما، دبلیو. اما، WC; او، برش تطبیقی مبتنی بر P. NURBS برای نمونه سازی سریع کارآمد. محاسبه کنید. به دس کمک کرد. 2004 ، 36 ، 1309-1325. [ Google Scholar ] [ CrossRef ]
- اوروپالو، دبلیو. پیگل لس، ا. روزن، پی. Rajab, K. ایجاد ابرهای نقطه ای برای برش اشیاء آزاد برای چاپ سه بعدی. محاسبه کنید. به دس کمک کرد. Appl. 2017 ، 14 ، 242-249. [ Google Scholar ] [ CrossRef ]
- شی، ک. کای، سی. وو، زی. Yong, J. تولید ساختار برش و پشتیبانی برای چاپ سه بعدی به طور مستقیم بر روی مدل های B-rep. Vis. محاسبه کنید. Ind. Biomed. هنر 2019 ، 2 ، 3. [ Google Scholar ] [ CrossRef ]
- ژائو، جی. ما، جی. فنگ، جی. Xiao، W. روشهای تولید مسیر و برش غیرمسطح برای ساخت افزودنیهای روباتیک. بین المللی J. Adv. Manuf. تکنولوژی 2018 ، 96 ، 3149. [ Google Scholar ] [ CrossRef ]
- کرسلین، جی. حقیقی، پ. جاجونگ، پی. رامنات، اس. سوترادار، ا. شاه، جی جی بازیابی شکل مقطعی خودکار ساختارهای انشعاب سه بعدی از ابر نقطه. جی. کامپیوتر. دس مهندس 2018 ، 5 ، 368-378. [ Google Scholar ] [ CrossRef ]
- لیو، دبلیو. سان، ج. لی، دبلیو. هو، تی. وانگ، پی. یادگیری عمیق در مورد ابرهای نقطه و کاربرد آن: یک بررسی. Sensors 2019 , 19 , 4188. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- گریفیث، دی. Boehm, J. A Review on Deep Learning Techniques for 3D Sensed Data Classification. Remote Sens. 2019 , 11 , 1499. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گوا، ی. وانگ، اچ. هو، کیو. لیو، اچ. لیو، ال. بننامون، ام. یادگیری عمیق برای ابرهای نقطه سه بعدی: یک بررسی. arXiv 2019 ، arXiv:abs/1912.12033. [ Google Scholar ] [ CrossRef ]
- لی، دی. کوان، آی. وو، سی. وو، جی. تامیر، د. Rishe، N. بهینه سازی بازسازی سطح B-Spline برای حفظ ویژگی شارپ. در مجموعه مقالات دهمین کارگاه و کنفرانس سالانه محاسبات و ارتباطات (CCWC)، لاس وگاس، NV، ایالات متحده، 6 تا 8 ژانویه 2020؛ صص 359-364. [ Google Scholar ]
- مینیو، سی. پیرس، اس جی; Summan, R. الگوریتم های جدید برای تشخیص مرز ابر نقطه سطحی سه بعدی و بازسازی لبه. جی. کامپیوتر. دس مهندس 2019 ، 6 ، 81–91. [ Google Scholar ] [ CrossRef ]
- مارکوویچ، وی. یاکوویویچ، ز. Miljkovic، Z. ویژگی ساده سازی ابر نقطه سه بعدی حساس با استفاده از رگرسیون بردار پشتیبان. فنی گز. 2019 ، 27 ، 985–994. [ Google Scholar ]
- بازازیان، د. Casas, JR; روئیز-هیدالگو، جی. استخراج لبه سریع و قوی در ابرهای نقطه سازمان نیافته. در مجموعه مقالات کنفرانس بین المللی محاسبات تصویر دیجیتال: تکنیک ها و کاربردها (DICTA)، آدلاید، استرالیا، 23 تا 25 نوامبر 2015. صص 1-8. [ Google Scholar ]
- وانگ، YX; وانگ، جی. چن، ایکس. چو، تی. لیو، ام. Yang, T. ویژگی استخراج و بازسازی سطح از اجزای صنعتی با استفاده از تقسیم بندی چند مرحله ای و بهینه سازی. Remote Sens. 2018 , 10 , 1073. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- موروالد، تی. بالزر، جی. Vincze, V. مدلسازی مناطق متصل در ابرهای نقطه مسطح دلخواه با تقریب B-spline قوی. ربات. Auton. سیستم 2008 ، 76 ، 141-151. [ Google Scholar ] [ CrossRef ]
- Jolliffe، تجزیه و تحلیل مؤلفه اصلی فناوری اطلاعات ؛ Springer: نیویورک، نیویورک، ایالات متحده آمریکا، 1986; پ. 487. [ Google Scholar ]
- بانچوف، تی. گافنی، تی. مک کروری، سی. جام های نقشه گاوس. در یادداشت های تحقیق در ریاضیات ; پیتمن: لندن، بریتانیا، 1982. [ Google Scholar ]
- وبر، سی. هامن، اس. Hagen, H. روشهای تشخیص ویژگی در ابر نقطه. در تجسم مجموعه داده های بزرگ و بدون ساختار – کارگاه IRTG ; Middel, A., Scheler, I., Hagen, H., Eds.; Schloss Dagstuhl–Leibniz-Zentrum fuer Informatik: Bodega Bay, CA, USA, 2010; ص 90-99. [ Google Scholar ]
- پیگل، ال. Tiller, W. The NURBS Book ; Springer: نیویورک، نیویورک، ایالات متحده آمریکا، 1997. [ Google Scholar ]
- de Boor, C. A Practical Guide to Splines ; Springer: نیویورک، نیویورک، ایالات متحده آمریکا، 2001. [ Google Scholar ]
- بلیک، ا. Isard, M. The Active Contours ; Springer: نیویورک، نیویورک، ایالات متحده آمریکا، 1998. [ Google Scholar ]
- وانگ، دبلیو. پوتمن، اچ. لیو، ی. برازش منحنیهای B-spline برای اشاره به ابرها با به حداقل رساندن فاصله مربعی مبتنی بر انحنا. ACM Trans. نمودار. 2006 ، 25 ، 214-238. [ Google Scholar ] [ CrossRef ]





بدون دیدگاه