

افزایش به موقع بودن نقشه برداری پهپاد در مقیاس بزرگ. رویکردهای ارجاع جغرافیایی مستقیم: استراتژی های عملیاتی و بهترین شیوه ها
خلاصه
امروزه استفاده از وسایل نقلیه هوایی بدون سرنشین (UAV) یک رویکرد استاندارد در چندین زمینه کاربردی است. تحقیقات مرتبط با این سیستم ها موضوعات مختلفی را در بر می گیرد و تکامل این پلتفرم ها و کاربردهای آنها به سرعت در حال رشد است. علیرغم سطح بالایی از خودکارسازی که امروزه به دست آمده است، هنوز مرحله ای از خط لوله فتوگرامتری پهپادها وجود دارد که به تلاش زیادی از نظر زمان و منابع نیاز دارد (یعنی فاز ارجاع جغرافیایی). با این حال، به لطف در دسترس بودن گیرندههای GNSS درجه پیمایش (سیستم ناوبری ماهوارهای جهانی) که در سکوهای هوایی تعبیه شدهاند، میتوان این مرحله از پردازش را با اتخاذ روشهای ارجاع جغرافیایی مستقیم (یعنی بدون استفاده از هیچ نقطه کنترل زمینی و …) ارتقا داد.

بهره برداری از موقعیت یابی سینماتیک زمان واقعی (RTK). این کار به بررسی امکانات ارائه شده توسط یک سیستم تجاری چند روتور مجهز به گیرنده GNSS فعال با RTK میپردازد که بر دقت فاز ارجاع جغرافیایی تمرکز دارد. چندین آزمایش در یک مطالعه موردی موقت با بهرهبرداری از راهحلهای مختلف ارجاع جغرافیایی و ارزیابی دقتهای موقعیتی سهبعدی، به لطف شبکهای از نقاط کنترل، انجام شد. بهترین رویکردهایی که باید در این زمینه با توجه به الزامات دقت محصولات نقشه نهایی اتخاذ شود، شناسایی و دستورالعملهای عملیاتی بر این اساس پیشنهاد شد. به لطف شبکه ای از نقاط کنترل بهترین رویکردهایی که باید در این زمینه با توجه به الزامات دقت محصولات نقشه نهایی اتخاذ شود، شناسایی و دستورالعملهای عملیاتی بر این اساس پیشنهاد شد. به لطف شبکه ای از نقاط کنترل بهترین رویکردهایی که باید در این زمینه با توجه به الزامات دقت محصولات نقشه نهایی اتخاذ شود، شناسایی و دستورالعملهای عملیاتی بر این اساس پیشنهاد شد.
کلید واژه ها:
پهپاد ؛ SfM ; PPK _ RTK ; NRTK ; ارجاع جغرافیایی مستقیم
1. معرفی
وسایل نقلیه هوایی بدون سرنشین (پهپادها) امروزه یک رویکرد تلفیقی را در چندین زمینه کاربردی نشان می دهند. تکامل این سیستم ها و انتشار استفاده از آنها چندین مرحله بعدی را دنبال کرده است، همانطور که به وضوح توسط Colomina ana Molina در [ 1 ] توضیح داده شده است، جایی که تکامل پهپادها در زمینه سنجش از دور و فتوگرامتری گزارش و بحث شده است. زمینه های کاربرد پهپاد بیشتر در [ 2 ] مشخص شده است، جایی که محدوده عملیاتی این سکوها با توجه به سایر تکنیک های ژئوماتیک و بسته به ابعاد و پیچیدگی منطقه مورد بررسی، به تفصیل و مورد بحث قرار گرفته است. Nex و Remondino شش زمینه اصلی کاربرد پهپاد (که توسط چندین گروه تحقیقاتی به آن پرداخته شد) شناسایی کردند، یعنی: کشاورزی [ 3 ,4 ، 5 ، 6 ]، جنگلداری [ 7 ، 8 ، 9 ، 10 ] ، باستان شناسی و معماری [ 11 ، 12 ، 13 ، 14 ، 15 ، 16 ، 17 ] ، محیط زیست [ 18 ، 19 ، 20 ، اضطراری، مدیریت [ 22 ، 23 ، 24 ] و نظارت بر ترافیک [ 25 ، 26 ، 27 ، 28 ].
انتشار پهپادها در حوزههای کاربردی فوقالذکر، فعالیتهای پژوهشی و نوآوری مرتبط را که عمدتاً بر روی ارجاع جغرافیایی تصویر (با توجه به الزامات دقت موقعیتی) و اتوماسیون پردازش تصویر (با توجه به ناهمگونی مهارتهای کاربران نهایی) متمرکز بود، تقویت کرده است. نکته مهم این است که تکامل فناوری با کاهش هزینههای خرید همراه با گسترش مداوم بازار و انتشار این پلتفرمها در حوزههای مختلف جامعه [29، 30]، عامل دیگری است که تحقیقات را تقویت کرده است. اقدامات در این زمینه
ویژگیهای اصلی که موفقیت پهپادها را مشخص میکند، بهویژه در مقایسه با اکتشافهای هوابرد سرنشیندار، مربوط به کاهش ارتفاع پرواز با پیامدهای آشکار در قطعنامهها است (از سوی دیگر محدودیتهای ارتفاع پرواز که توسط بسیاری از مقررات معرفی شدهاند، ممکن است یک عامل محدودکننده باشد. برای وسعت منطقه مورد بررسی)، اتخاذ انواع مختلف حسگرها (هم مبتنی بر تصویر و هم مبتنی بر برد و حساس به بخشهای مختلف طیف الکترومغناطیسی)، و کاهش هزینهها. به طور کلی، پهپادها انعطافپذیرتر هستند و میتوانند به راحتی در میدان مستقر شوند، بنابراین تحلیلهای چندزمانی را نیز ممکن میسازند.
تا آنجا که به محدودیت های عملیاتی مربوط می شود، مسائل باز اصلی مربوط به وسعت منطقه بررسی شده (به دلیل استقلال پرواز این سکوها و همچنین محدودیت های BVLOS (فراتر از خط دید بصری) که توسط مقررات ملی تحمیل شده است)، وزن محموله یک پهپاد کوچک و متوسط (عنصر مهمی که بر ویژگی های فنی سنسورهای نصب شده تأثیر می گذارد) و تأثیر شرایط آب و هوایی (به ویژه از نظر وزش باد).
دو عنصر اولی که برای تعریف پهپاد در نظر گرفته می شود، وزن و ابعاد پلت فرم است که عموماً برای دسته بندی پهپادها و در نتیجه وظایفی که می توانند حل کنند، استفاده می شود. پارامتر وزن عنصری است که در مقررات ملی و بینالمللی برای تعریف دستهای که پهپاد تعیینشده میتواند در آن کار کند، استفاده میشود. مقررات ایتالیایی برای استفاده از پهپادها که از سازمان هواپیمایی کشوری ایتالیا (ENAC) صادر و نظارت می شود، مجموعه ای از مقررات را بسته به MTOW (حداکثر وزن برخاست) سکوی مورد نظر ارائه می دهد. این رویکرد همچنین در مقررات اروپایی و سایر کشورها همانطور که در [ 31] گزارش شده است، اتخاذ شده است]. کشورهای مختلف اروپایی در حال تطبیق مقررات خود با استانداردهای جدید صادر شده توسط EASA (آژانس ایمنی هوانوردی اتحادیه اروپا) هستند. فهرست کاملی از مراجع به مقررات واقعی و مقامات ملی هوانوردی در کشورهای مختلف اروپایی را میتوانید در وبسایت EASA در [ https://www.easa.europa.eu/domains/civil-drones/naa ] پیدا کنید. برای آزمایشهای ارائهشده در این دستنوشته، فقط از سکوهای با وزن کمتر از 2 کیلوگرم استفاده شد. مقررات مربوطه در بخش دوم از ویرایش سوم مقررات ایتالیایی گزارش شده است [ 32 ].
ساختار فیزیکی پلت فرم برای طبقه بندی بیشتر سکوهای پهپاد، یعنی پلتفرم های بال ثابت و چند روتور استفاده می شود. این طبقهبندی صرفاً رسمی نیست، زیرا انتخاب دستهای که مورد استفاده قرار میگیرد به شدت به الزامات کاربرد و شرایط محیطی بستگی دارد. راهحلهای بال ثابت اجازه میدهند تا مناطق بزرگتر در مدت زمان محدودی پوشش داده شوند، در حالی که سیستمهای مولتی روتور عموماً به راحتی در میدان (مخصوصاً از نظر برخاست و فرود) قابل استقرار هستند، انعطافپذیرتر و قابل مانور هستند و کمتر تحت تأثیر شرایط آب و هوایی قرار میگیرند. 1 ].
این نسخه خطی بر روی یک رویکرد خاص (ژئو ارجاع مستقیم) متمرکز شده است تا به طور عمده از نظر زمان و دقت موقعیت، ارجاع جغرافیایی تصاویر به دست آمده توسط یک پلت فرم چند روتور را بهبود بخشد. پیشینه، زمینه، و جزئیات در مورد این موضوع خاص در پاراگراف های زیر ارائه شده است.
1.1. وسایل نقلیه هوایی بدون سرنشین (UAVs) و ساختار از حرکت (SfM) رویکردها
تهیه تصویر و پهپادها از زمان اولین توسعه سکوهای هوایی بدون سرنشین به شدت با هم مرتبط بوده اند. این امر با توسعه موازی دوربینهای COTS (Commercial Off The Shelf) برای ادغام با پلتفرمهای هوایی نشان داده شد و امکان استفاده از حسگرهای نوری (مرئی) با وضوح بالا به عنوان محمولههای پهپاد برای کاربردهای فتوگرامتری را فراهم کرد [33 ]]. با توجه به ویژگی های فنی، این نوع دوربین ها همیشه برای کاربرد فتوگرامتری با دقت بالا مناسب نیستند و ارزیابی عملکرد آنها و کالیبراسیون دقیق به طور کلی مرحله مهمی از پردازش کلی فتوگرامتری است. بنابراین، بهبود خطوط لوله فتوگرامتری خودکار (به طور کلی بر اساس رویکردهای ساختار از حرکت (SfM)) یک گام مهم دیگر را نشان می دهد.
بر این اساس، در سالهای گذشته، مطالعات متعددی بر روی استفاده از پهپادها برای تولید مدلهای سه بعدی و محصولات متریک ارزش افزوده با استفاده از رویکردهای SfM متمرکز شدهاند. اینها جنبه های مختلفی را مورد بررسی قرار داده اند (به عنوان مثال، بهینه سازی مراحل برنامه ریزی پرواز و گرفتن تصویر [ 34 ، 35 ]، استفاده از تصاویر مایل [ 36 ]، بهینه سازی پیکربندی نقاط کنترل [ 37 ، 38 ، 39 ]، ارزیابی دقت هندسی محصولات فتوگرامتری [ 40 ] و کالیبراسیون دوربین [ 41 ، 42 ]).
1.2. مسائل مربوط به ارجاع جغرافیایی در خط لوله فتوگرامتری پهپاد
فرآیند فتوگرامتری از فرآیند سریع خودکارسازی در سالهای گذشته بهره میبرد که منجر به کاهش زمان لازم برای تکمیل فرآیند و همچنین سطح پایینتر مداخله انسانی شد. با این وجود، فاز ارجاع جغرافیایی هنوز تقریباً کاملاً دستی است. علاوه بر این، در به روزترین رویکردهای SfM، این مرحله زمانبرترین و کمتر خودکار است. رویکرد رایج برای انجام مرحله ارجاع جغرافیایی به عنوان ارجاع جغرافیایی غیرمستقیم نامیده می شود و استفاده از GCP (نقاط کنترل زمینی) و CPs (نقاط بررسی) را پیش بینی می کند [43] .]. مهمترین نقطه ضعف این روش این است که GCPها و CPها باید در میدان اندازه گیری شوند (با استفاده از تکنیک های توپوگرافی سنتی یا با استفاده از گیرنده های GNSS) و همچنین در مواردی که اهداف طبیعی مناسب نیستند، از قبل تعیین شوند. این مرحله از کار میدانی، مطمئناً یکی از زمانبرترین مراحل است و بسته به دسترسی منطقه، ممکن است غیرممکن باشد. علاوه بر این، استفاده از GCP ها در مرحله پردازش داده ها نیز زمان بر است، زیرا یک اپراتور باید به صورت دستی نقاط روی تصاویر را شناسایی کند تا مختصات نقشه را با نقاط تصویر پیوند دهد [38] .]. راهحلهای مبتنی بر تشخیص خودکار/نیمه خودکار اهداف مصنوعی برای استفاده بهعنوان GCP در حال حاضر وجود دارد: با این وجود، مراحل کار میدانی موقعیتیابی و اندازهگیری هدف همچنان یک عملیات زمانبر است.
شرایط محیطی مختلف می تواند موقعیت و اندازه گیری نقاط کنترل در میدان را محدود یا محدود کند: ایمنی اپراتورها (به عنوان مثال، در شرایط اضطراری یا در مناطق خطرناک)، غیرقابل دسترس بودن منطقه بررسی شده، یا منابع محدود از نظر زمانی. ، اپراتورها و صندوق ها. ارجاع جغرافیایی تصاویر به دست آمده از پهپاد حداقل به استفاده از چهار GCP نیاز دارد [ 37]، با این حال، استفاده از تعداد بیشتری از GCPها به طور کلی برای معرفی افزونگی و تخمین بهتر IOP دوربین (پارامترهای جهت گیری داخلی) توصیه می شود. تعداد و توزیع فضایی GCPها (که باید بسته به وسعت منطقه مورد بررسی نیز تعریف شود) عنصر حیاتی دیگری برای تضمین دقت همگن محصولات فتوگرامتری تولید شده است. با این وجود، به دلایل محیطی ذکر شده، همیشه نمی توان به پیکربندی صحیح شبکه GCP ها دست یافت و اغلب هیچ یک یا فقط تعداد محدودی از GCP ها را نمی توان موقعیت و اندازه گیری کرد.
برای رویارویی با مسائل ذکر شده، در سالهای گذشته، چندین گروه تحقیقاتی استراتژیهایی را برای بهینهسازی مرحله جهتگیری بیرونی ایجاد کردهاند. برخی از نویسندگان، مانند [ 44 ]، بر روی غلبه بر استفاده از GCPها با استفاده از رویکردهای ثبت نام مشترک در میان مجموعه داده های چند زمانی تمرکز کرده اند. مشارکت های دیگر [ 37 ، 38 ، 45 ] بر بهینه سازی تعداد و موقعیت GCP ها متمرکز شده اند.
اخیراً، این تحقیق بر روی رویکرد ارجاع جغرافیایی مستقیم متمرکز شده است (که به هیچ GCP نیاز ندارد و معمولاً برای چندین سال برای بررسیهای فتوگرامتری هوایی سرنشین دار استفاده میشود)، که با در دسترس بودن GNSS با درجه نظرسنجی کوچک (ماهواره ناوبری جهانی) فعال شد. سیستم) گیرنده ها و IMU (واحدهای اندازه گیری اینرسی) که می توانند روی پهپادها تعبیه شوند و برای ردیابی سکو در طول پرواز استفاده شوند [ 46]]. ارجاع جغرافیایی مستقیم برای بهینه سازی کلی بررسی فتوگرامتری مبتنی بر پهپاد بسیار جذاب است، با این حال، مسائل مختلف هنوز باقی مانده است و دقت نهایی هنوز باید به دقت ارزیابی شود، به ویژه برای پلت فرم های پهپاد درجه یک مصرف کننده. همانطور که در [ 47 ] گزارش شده است، یک گام مهم برای موفقیت رویکردهای georeferencing مستقیم، مربوط به کالیبراسیون و همگام سازی حسگرهای مختلف نصب شده بر روی کشتی است .
1.3. برآورد پارامترهای جهت گیری داخلی (IOP) و ارتباط آن با رویکردهای ژورفرنسینگ
در رویکردهای مدرن SfM، فاز تخمین IOP در طول اولین فرآیند هم ترازی تصویر (همچنین به عنوان جهت گیری نسبی شناخته می شود) حل می شود و در فرآیند BBA (تنظیم بلوک بسته ای) اصلاح می شود، که در آن هندسه صحنه، EOP دوربین (پارامترهای جهت گیری خارجی) و تخمین IOP دوربین به طور همزمان حل می شود. در مرحله کالیبراسیون دوربین، مدل دوربین به طور کلی بر اساس برآمدگی مرکزی است و مدلسازی دوربین بر اساس مدلهای مختلفی مانند مدل براون [48، 49]، مدل فریزر [ 50 ] یا سایر مدلهای چند جملهای [ 51 ] است. IOPها پارامترهای زیر را توصیف میکنند: فاصله کانونی ( f )، جابجایی نقاط اصلی ( cx، cy).اعوجاج شعاعی ( k 1 – k 4 )، اعوجاج مماسی ( p 1 – p 4 ) و انحراف ( b 1 , b 2 ). این پارامترها برای مدلسازی پیکربندی فیزیکی عناصر مختلف که لنز حسگر را تشکیل میدهند استفاده میشوند و تعریف آنها برای دستیابی به دقت هندسی بالا بسیار مهم است. چندین تکنیک کالیبراسیون اصلاح و آزمایش شده است، از جمله راه حل های متناسب با فتوگرامتری UAV همانطور که در [ 33 ، 47 ، 52 گزارش شده است.]. سه رویکرد اصلی در چارچوب این تحقیق در نظر گرفته شد: گواهی کالیبراسیون آزمایشگاهی ارائه شده توسط سازنده پهپاد. خود کالیبراسیون در محل کار؛ و در نهایت استفاده از گواهی کالیبراسیون برآورد شده در طول پردازش فتوگرامتری قبلی. خود کالیبراسیون دوربین تحت تأثیر عوامل مختلفی مانند هندسه اکتساب انجام شده، درصد همپوشانی تصویر، تغییرات ارتفاع پرواز، گنجاندن تصاویر مایل، و تعداد و موقعیت GCP ها قرار می گیرد [ 41 ، 53 ، 54 ، 55 ] .
همانطور که قبلاً توسط ادبیات مرجع تأکید شده است و همانطور که در این مقاله بیشتر مورد بحث قرار خواهد گرفت، تخمین صحیح IOP به ویژه هنگام اتخاذ رویکردهای ارجاع جغرافیایی مستقیم مهم است.
1.4. رویکردهای ارجاع جغرافیایی مستقیم
راهحلهای متفاوتی را میتوان برای ارجاع جغرافیایی تصاویر پهپاد بدون استفاده از هیچ GCP (یعنی با استفاده از یک روش ارجاع جغرافیایی مستقیم) اتخاذ کرد. همانطور که توسط [ 55 ] گزارش شده است، این رویکردها عمدتاً به لطف کیفیت بهبود یافته حسگرهای درونی پهپادها، یعنی گیرنده GNSS (در حال حاضر گیرنده فرکانس دوگانه و با دقت بالا کم هزینه و چند صورت فلکی در دسترس هستند) و IMU (اندازه گیری اینرسی) امکان پذیر شد. واحد). ادغام این دو دسته از حسگرها به ما امکان می دهد موقعیت و جهت پلت فرم را در زمان بدست آوردن تخمین بزنیم، و یک رویکرد مرجع جغرافیایی مستقیم را ممکن می سازد [ 56]]. اندازهگیریهای IMU عمدتاً برای تخمین وضعیت سکو در طول پرواز استفاده میشوند و در فایل مهر زمانی ادغام میشوند که سپس برای بازسازی جهت دوربین و افست با توجه به APC (مرکز فاز آنتن) در زمان دریافت تصویر استفاده میشود.
به طور خاص تر، ارجاع جغرافیایی مستقیم را می توان با دو رویکرد اصلی به دست آورد: (1) PPK (سینماتیک پس از پردازش) و (ب) RTK (سینماتیک در زمان واقعی) یا NRTK (سینماتیک در زمان واقعی شبکه).
در رویکرد PPK، تصحیح موقعیتهای پهپاد ثبت شده توسط گیرنده GNSS در طول پرواز و تخمین موقعیتهای دوربین پس از مرحله جمعآوری دادهها انجام میشود. این راهحل اجازه میدهد تا از دادههای ephemeris دقیق در محاسبات استفاده شود و از نظر تئوری به نتایج دقیقتری دست یابد.
در رویکرد RTK، مختصات اندازهگیری شده توسط GNSS با اطلاعات ارسال شده توسط ایستگاه پایه تصحیح میشود و موقعیتهای دوربین در زمان واقعی برآورد میشوند. ایستگاه پایه GNSS می تواند یک تنظیم گیرنده در میدان یا یک ایستگاه مجازی باشد که توسط شبکه ای از CORS ها (ایستگاه های مرجع مستمر در حال کار) ایجاد شده است، که اصلاحات آنها از طریق یک انتقال شبکه ای GNSS از RTCM از طریق پروتکل اینترنت (NTRIP) ارسال می شود. رویکرد اخیر به عنوان راه حل NRTK شناخته می شود. این راه حل به اتصال رادیویی پایدار و همچنین اتصال به اینترنت نیاز دارد.
تمام رویکردهای توصیف شده در بالا، به صورت تئوری امکان دستیابی به چند سانتی متر دقت موقعیتی محصولات ارزش افزوده را فراهم می کند و چندین مطالعه مرتبط در ادبیات موجود است [ 37 ، 55 ، 57 ، 58 ، 59 ، 60 ، 61 ، 62 ، 63]. علیرغم ادبیات موجود غنی و اخیر، مسائل مختلف هنوز باز هستند، به ویژه هنگام کار با سیستمهای پهپادهای تجاری و بازار انبوه، از جمله ارزیابی مناسب دقتهای موقعیتی ادعا شده. علاوه بر این، سایر مسائل مربوط به استراتژی های عملیاتی که باید در این زمینه اتخاذ شوند (به عنوان مثال، طرح پرواز، جهت گیری دوربین، ارزیابی دقت محصولات، و غیره) باید توسط جامعه تحقیقاتی بیشتر مورد توجه قرار گیرند.
1.5. اهداف و ساختار تحقیق
نتایج تحقیق ارائه شده در این مقاله به دو تجربه قبلی نویسندگان [ 64 ، 65 ] مرتبط است که به طور خلاصه در بخش بعدی گزارش خواهد شد و مطالعات موردی مختلف را با پلت فرم های بال ثابت و چند روتور بر اساس رویکردهای مختلف پوشش می دهد. برای تکمیل تجربه مربوط به این کارهای قبلی، مجموعه خاصی از آزمایشها طراحی شد تا به طور مداوم تأیید شود: (1) دقت موقعیتی محصولات ارزش افزوده بر اساس تصاویر به دست آمده توسط یک پلت فرم تجاری، DJI Phantom 4 RTK. (2) استراتژیهای مختلف ارجاع جغرافیایی مستقیم که میتوانند در این زمینه اتخاذ شوند. و (iii) دستورالعمل های عملیاتی و بهترین شیوه هایی که می توان دنبال کرد.
مشخصات اصلی پلت فرم با ویژگی های اصلی سایت تست در بخش 2 ارائه شده است . جزئیات مربوط به برنامهریزی و اجرای اکتساب، از جمله راهاندازی شبکه توپوگرافی، اندازهگیری نقاط کنترل، و طراحی مسیرهای پروازی مختلف بسته به راهحل ژورفرنس مستقیم اتخاذ شده نیز در بخش 2 گزارش شده است . استراتژیهای پردازش مجموعه دادههای مختلف بهدستآمده نیز به تفصیل و در همان بخش مورد بحث قرار میگیرند، و مسائلی را که در این مرحله با آن مواجه شدهاند و راهحلهای اتخاذ شده برجسته میکنند.
نتایج ارزیابی های دقت انجام شده پس از مرحله پردازش در بخش 3 نشان داده شده و مورد بحث قرار گرفته است .
در نهایت، اظهارات نهایی مربوط به بهترین استراتژیهای زمین مرجع مستقیم و دقتهای مرتبط در بخش 4 ارائه شده است .
2. مواد و روشها
2.1. تجربیات اولیه
با هدف ارائه یک نمای کلی از مبحث ارجاع جغرافیایی مستقیم، ارائه خلاصه ای از دو تجربه قبلی نیز در رابطه با دسته های مختلف پهپاد (بال ثابت)، سایر کاربردها (مدیریت اضطراری) و مطالعات موردی بیشتر مفید تلقی می شود. (جزئیات را می توان در مراجع مربوطه بازیابی کرد).
یک آزمایش خاص به فعالیت های گروه ضربت پلی تکنیک تورین پس از زلزله 2016 در مرکز ایتالیا متصل شد [ 64]]. هدف از این کار آزمایش قابلیت PPK یک پلتفرم بال ثابت، eBee plus توسط SenseFly، در یک سناریوی پس از فاجعه بود. در واقع، در این سناریوی خاص، اندازه گیری نقاط کنترل بسیار پیچیده است و ایمنی اپراتورهای درگیر در فعالیت های میدانی باید به دقت مورد توجه قرار گیرد. آزمایش های ارائه شده در این تحقیق در شهر آکومولی (RI)، یکی از روستاهای ایتالیا که در زلزله سال 2016 به شدت آسیب دیده است، انجام شده است. در این اولین تجربه، روش ارجاع جغرافیایی مستقیم با استفاده از دو استراتژی مختلف مورد آزمایش قرار گرفت: با استفاده از مشاهده خام GNSS (بدون هیچ گونه پردازش پس از آن) به دست آمده در طول اکتساب و داده های PPK پس از پردازش. علاوه بر این، پیکربندیهای مختلف GCP/CP برای هر دو استراتژی ارجاع جغرافیایی مورد آزمایش قرار گرفتند: (i) 0 GCP (مرجع جغرافیایی مستقیم) و 31 CP،
خلاصه ای از نتایج به دست آمده در این تحقیق در جدول 1 گزارش شده است .
نتایج این آزمایش نشان میدهد که بدون استفاده از هیچ نقطه کنترل زمینی، میتوان با استفاده از پهپاد مجهز به گیرنده GNSS با کارایی بالا و اتخاذ رویکرد PPK (در حالی که با اندازهگیریهای خام GNSS بدون هیچ گونه پس پردازشی، به دقت سطح سانتیمتری رسید. فقط به دقت چند متر می توان دست یافت). معرفی چند GCP فقط با داده های خام GNSS بسیار مهم است.
دومین آزمایش اولیه از مجموعه آزمایشهایی که در سال 2019 بر روی یک دارایی میراث فرهنگی در نزدیکی تورین (ایتالیا)، Castellazzo of Caluso انجام شد، ارائه شد [ 65 ]. در این کار، از همان پلت فرم چند روتوری مورد استفاده برای آزمایش ارائه شده در این دستنوشته استفاده شد و آزمایشهای انجامشده برای تنظیم روششناسی و آزمایشهایی که بخشی از تحقیق حاضر هستند، اهمیت ویژهای داشتند.
دو استراتژی مختلف ارتباط جغرافیایی مستقیم، PPK و NRTK، تنها با تصاویر نادرال مورد آزمایش قرار گرفتند. تنها استفاده از تصاویر نادرال مسائلی را در فاز کالیبراسیون دوربین ایجاد کرد و راهکارهای مختلفی برای مقابله با این موضوع پیشنهاد، تحلیل و مورد بحث قرار گرفت. نتایج اصلی برای رویکردهای زمین مرجع مستقیم گزارش شده در این تحقیق در جدول 2 به تفصیل آمده است .
در هر دو آزمایش، دقت استراتژیهای مختلف زمینارجاع با تجزیه و تحلیل انحراف بین مختصات نقاط کنترل اندازهگیری شده در میدان و مختصات همان نقاط استخراجشده از پردازش فتوگرامتری ارزیابی شد.
2.2. پلتفرم مستقر و سایت تست
COTS. این راه حل تجاری خاص از آنجایی انتخاب شد که مجهز به گیرنده GNSS چند فرکانسی و چند صورت فلکی با قابلیت RTK است که مشاهدات GNSS خام را با نرخ نمونه برداری 5 هرتز ثبت می کند. این پلتفرم با بهرهبرداری از این فایل مشاهده و به لطف IMU، یک فایل متنی به نام timestamp را نیز ذخیره میکند که حاوی اطلاعاتی درباره موقعیت و جهت دوربین در زمان نوردهی در طول پرواز است. دوم، مشابه دیگر پلتفرمهای گرانتر این شرکت، Phantom 4 RTK میتواند مستقیماً به یک ایستگاه پایه GNSS برای انتقال تصحیح دیفرانسیل بلادرنگ از جمله ایستگاه DJI D-RTK 2، یک ایستگاه پایه GNSS که توسط خود DJI تولید میشود، متصل شود. . مشخصات اصلی پلت فرم در جدول 3 گزارش شده است، در حالی که ویژگی های فنی اصلی ایستگاه پایه D-RTK 2 در جدول 4 گزارش شده است .
از جمله مقالات علمی اصلی متمرکز بر استفاده از این پلت فرم، Ref. [ 33 ] عملکرد یک Phantom 4 Pro و یک Phantom 4 RTK را مقایسه کرد. در [ 68 ، 69 ]، نویسندگان استراتژیهای مختلف ارجاع جغرافیایی مستقیم را برای نظارت بر یک منطقه ساحلی آزمایش کردند. مرجع. [ 70 ] یک میدان آزمایشی با نقاط مختصات شناخته شده برای ارزیابی دقت حالت های مختلف پرواز GNSS ایجاد کرد. و در نهایت، Ref. [ 63 ] نتایج قابل دستیابی با Phantom 4 RTK را در سناریوهای عملیاتی مختلف و با اتخاذ استراتژیهای مختلف زمین مرجع مستقیم ارزیابی کرد.
در پژوهش ارائه شده در این دستنوشته، مواردی که در پژوهش مذکور مورد بررسی قرار نگرفته و یا به طور جزئی به آن پرداخته شده، مورد توجه و تحلیل قرار گرفته است. به طور خاص، دو رویکرد آزمایش شده است: (1) رویکرد PPK با استفاده از یک گیرنده GNSS قسمت سوم که روی نقطه ای از مختصات شناخته شده قرار گرفته است، و (ب) رویکرد RTK با استفاده از آنتن DJI D-RTK 2 (DRTK). علاوه بر این، یک مرور کلی از همه رویکردهای مختلف ارجاع جغرافیایی مستقیم و ارزیابی عملکرد آنها که یک مطالعه موردی مشابه را پوشش میدهد، هنوز در ادبیات وجود ندارد.
نتایج ارائه شده مربوط به مجموعه ای از آزمایشات انجام شده در منطقه Tempio di Diana است که بخشی از باغ های Reggia di Venaria Reale است [ https://www.lavenaria.it/en ] و در 25 واقع شده است. کیلومتری شمال تورین. Reggia di Venaria یکی از اقامتگاه های تاریخی کاخ سلطنتی ساووی بوده و از سال 1997 در فهرست میراث جهانی یونسکو قرار گرفته است [ https://whc.unesco.org/en/list/ ].
به طور خاص، محل آزمایش ( شکل 1 ) در قسمت غربی باغ ها قرار داشت که میزبان بقایای ساختار معبد دیانا است، ساختمانی قرن هفدهم که بخشی از پروژه باغ های ساخته شده از Amedeo di Castellamonte بود. . معبد سپس در قرن 18 به دلیل تغییر در زیبایی شناسی ترکیب باغ تخریب شد [ 71]]. اخیراً، این منطقه بخشی از پروژه بازسازی و ارزش گذاری بود که شکل واقعی آن را مشخص کرد. این منطقه به دو دلیل اصلی انتخاب شده است: اول، شامل دسته بندی های مختلفی از ویژگی هایی است که امکان یافتن آنها در یک سناریوی موردی واقعی (اعم از طبیعی و ساخت انسان) وجود دارد، و دوم، تغییرات مختلفی در مولفه ارتفاع در سراسر منطقه ارائه می دهد. هر دوی این ویژگیها معمولاً در یک منطقه استاندارد پرواز پهپاد وجود ندارند، که معمولاً سطح صاف و عدم وجود ویژگیهای ساخت انسان را نشان میدهد. وسعت منطقه آزمایش به 0.5 کیلومتر مربع محدود شده است، که یک سازش قابل قبول از نظر تعادل هزینه و فایده در یک زمینه تحقیقاتی در نظر گرفته می شود. اندازه منطقه مورد نظر و زمان مورد نیاز برای بررسی آن (دو باتری برای هر آزمایش پرواز مورد نیاز است) با یک سناریوی واقعی در هنگام استفاده از سکوهای چند روتور (به عنوان مثال، بررسی یک سایت میراث فرهنگی) قابل مقایسه است. آزمایشهای بیشتر در مناطق وسیعتر با استفاده از پلتفرم پهپاد RTK با بال ثابت از قبل برنامهریزی شده است.
قبل از مرحله اکتساب، لازم بود شبکه ای از نقاط کنترل راه اندازی شود تا در مراحل بعدی پردازش داده ها و ارزیابی دقت موقعیت استفاده شود. مرحله اول شامل مادیت سازی و اندازه گیری دو راس بود. رئوس از طریق یک اکتساب GNSS ایستا (یک ساعت) با دو گیرنده Geomax Zenith 35 GNSS اندازه گیری شد. مشاهدات جمع آوری شده در میدان سپس با داده های به دست آمده از شبکه دائمی CORS های SPIN3 GNSS [ https://www.spingnss.it/spiderweb/frmIndex.aspx ادغام شدند. سرویس موقعیت یابی مناطق Piemonte، Lombardia، و Valle d’Aosta. بنابراین شبکه دو رأسی تنظیم شد و دقت نهایی مختصات سه بعدی برای هر دو نقطه کمتر از یک سانتی متر بود. مختصات شبکه و تمام اندازه گیری های توپوگرافی زیر به سیستم مختصات پیش بینی شده UTM 32N WGS84 ارجاع شده است. دومین عملیات میدانی، تعیین موقعیت و اندازه گیری مجموعه ای از 15 هدف تخته چک مصنوعی بود که به طور همگن در سراسر منطقه توزیع شده بودند. برای به دست آوردن مجموعه ای از نقاط با دقت سانتی متری، اهداف با استفاده از یک ایستگاه کل (Leica Viva Multi Station) با رویکرد شلیک جانبی سنتی اندازه گیری شدند: سپس مختصات نقاط با راه حل نرم افزار Microsurvey StarNet محاسبه شد.شکل 2 .
2.3. طرح پرواز و استراتژی های جذب تصویر
مرحله دوم کار میدانی، اجرای پروازهای مختلف برای به دست آوردن تصاویری بود که با رویکرد SfM پردازش می شدند. این پروازها با نرم افزار DJI Pilot، برنامه بومی DJI برای Phantom 4 RTK، برنامه ریزی و انجام شد. نکته مهم این است که مشاهدات خام GNSS فقط در حالت پرواز خودکار ذخیره می شوند، در حالی که اگر پهپاد به صورت دستی هدایت شود، ذخیره نمی شوند. به منظور دستیابی به بازسازی کامل منطقه Tempio di Diana، دو طرح پروازی مختلف برای هر یک از استراتژی های پروازی طراحی و اجرا شد که در بخش زیر توضیح داده شده است. مشخصات اصلی دو طرح پرواز در جدول 5 خلاصه شده است ، در حالی که طرح های پرواز در شکل 3 نشان داده شده است..
GSD مورد انتظار (فاصله نمونه برداری از زمین) از ترکیب این دو طرح پرواز حدود 1.5 سانتی متر بر پیکسل است.
2.4. راه حل های موقعیت یابی که در طول آزمایش های پرواز به تصویب رسید
دو طرح پروازی ارائه شده در پاراگراف قبل، سه بار، در مجموع شش پرواز، برای بهره برداری از راه حل های مختلف موقعیت یابی GNSS برای ارجاع جغرافیایی بلوک فتوگرامتری به دست آمده، انجام شد. خلاصه ای از پروازهای فتوگرامتری در جدول 6 گزارش شده است .
پرواز 1 با متداول ترین و یکپارچه ترین رویکرد برای نقشه برداری مبتنی بر پهپاد (یعنی استفاده از موقعیت گیرنده GNSS برای برچسب گذاری جغرافیایی در زمان واقعی تصاویر در زمان دریافت) تکمیل شد. با این وجود، با در دسترس بودن یک گیرنده GNSS با قابلیت RTK، دادههای خام GNSS را میتوان با استفاده از رویکرد PPK پردازش کرد.
این راه حل به طور کلی می تواند با استفاده از دو رویکرد مختلف پس پردازش شود: استفاده از GPC ها و داده های خام GNSS یا یک رویکرد ارجاع جغرافیایی مستقیم مبتنی بر PPK، با علم به این که یک روش ارجاع جغرافیایی مستقیم بدون هیچ گونه پس پردازش GNSS منجر به دقت موقعیت یابی ضعیف می شود (تعدادی). دقت متر).
این اکتساب در طول پرواز 2 با اتصال فعال پلت فرم به شبکه ای از CORS انجام شد و راه حلی به نام NRTK را اتخاذ کرد. پهپاد به یک سرویس NTRIP متصل است که توسط کنترلر رادیویی پخش می شود و از طریق اتصال به اینترنت دریافت می شود. این اتصال در دسترس بودن تصحیحات بلادرنگ را تضمین می کند که باعث می شود دقت موقعیت یابی پلت فرم و در نتیجه کیفیت در برچسب گذاری جغرافیایی تصاویر به دست آمده افزایش یابد. این رویکرد در صورتی امکان پذیر است که دو الزام اصلی برآورده شود: اول از همه، وجود شبکه ای از CORS که منطقه را پوشش می دهد (از جمله اشتراک در صورت لزوم) و وجود یک اتصال اینترنتی پایدار.
سرانجام، پرواز 3 با استفاده از DRTK فعال شده توسط ایستگاه DJI GNSS به عنوان راه حل موقعیت یابی تکمیل شد. این راه حل در واقع تنها با استفاده از گیرنده GNSS D-RTK 2 به عنوان ایستگاه پایه قابل دستیابی است (در حال حاضر هیچ گیرنده دیگری نمی تواند استفاده شود) و می تواند با دو استراتژی مختلف اتخاذ شود. استراتژی اول مستلزم قرار گرفتن D-RTK 2 بر روی نقطه ای از مختصات شناخته شده در ناحیه بررسی است، در حالی که استراتژی دوم به ایستگاه GNSS اجازه می دهد تا در هر نقطه ای قرار گیرد. D-RTK 2 اصلاحات بلادرنگ مورد نیاز برای افزایش دقت موقعیت یابی پهپاد را انجام می دهد. به طور کلی، اگر مختصات نقطه ای که ایستگاه در آن قرار دارد مشخص باشد (و در برنامه کنترل پرواز تنظیم شود) باید نتایج دقیق تری به دست آورد. اشکال این استراتژی نیاز به حداقل یک نقطه از مختصات شناخته شده در ناحیه مورد نظر است. علاوه بر این، دقت مختصات نقطه مرجع می تواند مستقیماً بر دقت مختصات ذخیره شده در برچسب جغرافیایی تصاویر به دست آمده تأثیر بگذارد. برای آزمایش ارائه شده در این دستنوشته، راه حلی که استفاده از یک نقطه از مختصات شناخته شده را پیش بینی می کند اتخاذ شد: گیرنده D-RTK GNSS روی یکی از دو رأس شبکه مرجع قرار گرفت.
2.5. تخمین IOP، کالیبراسیون دوربین و نقاط کنترل زمینی (GCP)
مسائل مربوط به تخمین IOP هنگام اتخاذ رویکردهای زمین مرجع مستقیم، با توجه به تجربیات قبلی گزارش شده در ادبیات، به دنبال استراتژی های مختلف مورد بررسی قرار گرفت. همانطور که در [ 47 ، 72 ] منتشر شده است، عدم وجود GCP ها می تواند منجر به تخمین ضعیف یا اشتباه IOP در طول مرحله خود کالیبراسیون شود. راه حل های ممکن برای حل این مسائل مستلزم استفاده از تعداد محدودی از GCP برای تقویت فاز ارجاع جغرافیایی و تخمین IOP دوربین یا بهره برداری از گواهی کالیبراسیون موجود است.
DJI یک گواهی IOP خاص برای هر پلتفرم Phantom 4 RTK ارائه می دهد: این اطلاعات مستقیماً در EXIF (فرمت فایل تصویری قابل تعویض) هر تصویر تعبیه شده است و شامل فاصله کانونی ، نقطه اصلی ، k 1 ، k 2 ، k 3 ، p 1 ، و p 2 . با این حال، همانطور که در مقاله قبلی [ 65]، گواهی ارائه شده توسط تولید کننده با برخی ناسازگاری ها با توجه به IOP تخمین زده شده از طریق یک رویکرد خود کالیبراسیون مشخص می شود. نتایج ارائهشده در این مقاله نشان میدهد که تغییرات کوچک در مقادیر IOP میتواند بر دقت جهتگیری بلوک فتوگرامتری زمانی که هیچ GCP در پردازش گنجانده نشده است، بسیار تأثیر بگذارد. در همان تحقیق، عنصر کلیدی دیگری نیز مورد تأکید قرار گرفت: استفاده از تصاویر مایل باعث میشود که مرحله خودکالیبراسیون دوربین قویتر شود (به همین دلیل، اگر فقط از تصاویر نادرال استفاده شود، که در آن برآورد صحیح IOP بسیار مهم است).
تا آنجا که به مطالعه موردی مربوط می شود، در طول پردازش مجموعه داده ها، رویکردهای مختلفی مورد آزمایش قرار گرفته است. رویکرد اول گنجاندن در پردازش یک یا سه GCP را پیشبینی میکند، و تأثیر روی IOP تخمینی و RMSE (ریشه میانگین مربع خطا) را بر روی CPهای مورد استفاده برای ارزیابی دقت سه بعدی جهتگیری بلوک ارزیابی میکند. رویکرد دوم مبتنی بر استفاده از گواهی کالیبراسیون بود که از طریق رویکرد کالیبراسیون خود بر اساس پردازش مجموعه دادههایی که قبلاً با همان پهپادها به دست آمده بودند، به دست آمد. دو مجموعه متفاوت از پارامترها استفاده شده است: یکی ماه ها قبل از مجموعه داده های تجزیه و تحلیل شده محاسبه شده ([ 65 ]، جدول 7 ، ستون دوم) و دیگری که از طریق خود کالیبراسیون در محل در همان منطقه به دست آمده است ( جدول 7) .، ستون سوم). پیش کالیبراسیون ارائه شده توسط DJI ( جدول 7 ، ستون اول) به دلیل نتایج ضعیف به دست آمده در تجربیات قبلی (همانطور که قبلا ذکر شد) و سایر ملاحظات برجسته شده در [ 69 ] مورد استفاده قرار نگرفت .
2.6. پردازش مجموعه داده های اکتسابی به دنبال استراتژی های مختلف
مرحله اول، مقدماتی برای پردازش داده ها با استفاده از روش های ارجاع جغرافیایی مستقیم، شامل پردازش سه پرواز (پروازهای 1، 2، و 3) با اتخاذ استراتژی های استاندارد بود. این سه پرواز با نرم افزار فتوگرامتری معروف Agisoft Metashape (v1.6.2.10247) پردازش شدند و این مرحله برای مراحل زیر بسیار مهم بود. به منظور تکرار نشدن شناسایی نقاط کنترل در تصاویر جهتیافته، در نتیجه عدم قطعیت ناشی از عملگرها هنگام تعیین دقیق (G)CPها، تصمیم گرفته شد که استراتژی متفاوتی را دنبال کنیم. بنابراین نقاط در این پردازش استاندارد اولیه شناسایی شدند و مختصات تصویر و نقشه آنها در یک فایل XML برای هر سه پرواز صادر شد. این فایل را می توان در پروژه های دیگر حاوی مجموعه ای از تصاویر وارد کرد،
2.6.1. Kinematik پس پردازش (PPK)
پردازش داده ها از طریق روش PPK با یک رویکرد دو مرحله ای انجام می شود. اولین گام این رویکرد، پردازش پس از مشاهده GNSS خام ثبت شده و ذخیره شده در طول پرواز را پیش بینی می کند. این مرحله مستلزم در دسترس بودن مشاهدات به دست آمده از یک ایستگاه پایه در طول پرواز پهپاد و یک راه حل نرم افزاری برای انجام پردازش است. با توجه به اینکه داده های مختلف را می توان به عنوان یک ایستگاه پایه استفاده کرد، چندین راه حل آزمایش شد: داده های به دست آمده در میدان از یک گیرنده بخش سوم (Geomax Zenith 35 در یکی از رئوس شبکه مرجع قرار گرفته است). مشاهدات جمع آوری شده از یکی از CORS های شبکه SPINGNSS. و در نهایت یک RINEX مجازی به لطف سرویس ارائه شده از همان سرویس شبکه مجازی در مرکز منطقه بررسی شده ایجاد شده است.https://www.rtklib.com/ ]. پردازش با استفاده از ماژول RTKPOST RTKLIB با استفاده از مشاهدات GNSS خام بدستآمده توسط ایستگاه پایه و پهپاد و همچنین ephemerides دقیق دانلود شده از [ https://cddis.nasa.gov/ ] انجام شد. برای پردازش فقط از صورت فلکی GPS و GLONASS استفاده شد و زاویه برش ارتفاع روی 15 درجه تنظیم شد. برای تمام آزمایشات PPK، کیفیت محلول (به طور خودکار به عنوان انحراف استاندارد توسط نرم افزار تخمین زده می شود) به طور کلی زیر نیم سانتی متر برای اجزای پلان متری و زیر یک سانتی متر برای مولفه ارتفاعی بود.
مرحله دوم این رویکرد شامل درونیابی موقعیت های دوربین است که از موقعیت های پلت فرم بعد از پردازش PPK در RTKLIB شروع می شود. برای این عملیات، فایل به اصطلاح timestamp بسیار مهم است که توسط Phantom 4 RTK به دست آمده و ذخیره شده است. این فایل حاوی نام تصاویر به دست آمده، زمان نوردهی آنها و فاصله بین APC و مرکز حسگر است. برای تکمیل این مرحله، یک صفحه گسترده توزیع شده از پیش تدوین شده توسط شرکت Aerotas [ https://www.aerotas.com/] مورد استفاده قرار گرفت. این صفحهگسترده دادههای بهدستآمده از محاسبات RTKLIB PPK را در مُهرهای زمانی مختلف درونیابی میکند و امکان تخمین مختصات دوربین را فراهم میکند. سپس این مختصات تصویر در نرم افزار فتوگرامتری برای انجام جهت گیری بلوک تصویر وارد شدند.
همانطور که در جدول 8 گزارش شده است، چندین پیکربندی از پردازش PPK مورد آزمایش قرار گرفت .
همانطور که در جدول مشاهده می شود، برای پرواز 1، هم تصاویر نادرال به تنهایی و هم پیکربندی تصاویر نادرال و مایل در نظر گرفته شده است. در پیکربندی از PPK_1 تا PPK_6، سه استراتژی مختلف ژئو ارجاع جغرافیایی با استفاده از رویکرد خود کالیبراسیون پیادهسازی و مورد ارزیابی قرار گرفت: رویکرد ارجاع جغرافیایی مستقیم بدون استفاده از GCP، رویکرد ارجاع جغرافیایی مستقیم با کمک یک GCP، و رویکرد ژورفرانس مستقیم با کمک سه GCPs (این دو مورد آخر را می توان به عنوان رویکردهای ترکیبی نام برد).
پیکربندی PPK_7 و PPK_8 از امکان استفاده از یک مجموعه تخمینی پیشینی از IOP به دست آمده توسط خود کالیبراسیون قبلی استفاده میکند. ایده پشت این آزمایشها افزایش ارجاع جغرافیایی مستقیم بلوک تصویر با استفاده از گواهی کالیبراسیون به جای یک یا چند GCP بود.
چندین آزمایش نیز با استفاده از منابع داده های مختلف به عنوان ایستگاه پایه انجام شد. پیکربندیهای PPK_1 تا PPK_8 از دادههای بهدستآمده در میدان توسط گیرنده GNNS بخش سوم (Geomax Zenith 35، قرار گرفته بر روی رأس شبکه مرجع V2000) در طول پروازهای پهپاد استفاده کردند. پیکربندی PPK_9 با استفاده از دادههای RINEX مجازی ایجاد شده ad-hoc (از طریق سرویس شبکه SPINGNSS) در مرکز منطقه تصویربرداری شده در طول پروازها پردازش شد. در نهایت، تنظیمات از PPK_10 تا PPK_15 برای ارزیابی استفاده از مشاهدات CORS، بسته به فاصله بین منطقه مورد بررسی و مکان CORS، اتخاذ شد.
2.6.2. Real Time Kinematik (RTK): شبکه Real Time Kinematik (NRTK) و DJI-Real Time Kinematik (DRTK)
به طور کلی، رویکردهای RTK در مقایسه با PPK سادهتر هستند، عمدتاً به این دلیل که موقعیتهای دوربین از قبل با دقت بالاتری در طول پرواز محاسبه میشوند، به لطف اصلاحات ارائه شده توسط یک ایستگاه مرجع. Phantom 4 RTK همچنین انحرافات بین APC و مرکز دوربین را در طول مرحله اکتساب در نظر می گیرد و مختصات برچسب جغرافیایی قبلاً بر این اساس اصلاح شده است. دو رویکرد مختلف RTK مورد آزمایش قرار گرفتند: NRTK و DRTK.
برای رویکرد NRTK، سرویس شبکه SPIN3 GNSS با استفاده از اتصال بین پلت فرم پهپاد و کنترل کننده رادیویی مورد استفاده قرار گرفت (اتصال اینترنت نیز مورد نیاز است). یک ایستگاه مرجع مجازی به طور خودکار از برنامه DJI در نزدیکی منطقه مورد نظر ایجاد شد.
برای رویکرد DRTK، اصلاحات توسط گیرنده GNSS D-RTK 2 ارائه شد که بر روی یک رأس شبکه مرجع قرار گرفت که مختصات آن قبلاً با تکنیکهای توپوگرافی سنتی اندازهگیری شده بود. سپس مختصات راس در برنامه DJI Pilot تنظیم شد. سپس به لطف اصلاحات ارائه شده توسط ایستگاه D-RTK2، برچسب جغرافیایی تصاویر به دست آمده به طور مستقیم در میدان اصلاح شد. همانطور که در جدول 9 گزارش شده است، پردازش داده های RTK جمع آوری شده در طول پرواز 2 و پرواز 3 به دنبال استراتژی های مختلف انجام شد .
همانطور که برای PPK و همچنین برای تمام دادههای RTK، هم تصاویر نادرال به تنهایی و هم پیکربندیهای تصویر نادرال و مایل در نظر گرفته شدند. علاوه بر این، همچنین برای این رویکرد، استراتژی افزایش ارجاع جغرافیایی مستقیم با یک یا چند GCP مورد آزمایش و تحلیل قرار گرفت. در نهایت، تنها رویکرد خود کالیبراسیون برای برآورد IOP اتخاذ شد. این تصمیم بر اساس نتایج آزمایشهای انجامشده در کار قبلی [ 65 ] گرفته شد و با نتایج رویکرد PPK (همچنین برای محدود کردن تعداد جداول و نمودارهای نسخه خطی) تأیید شد.
3. نتایج
در این بخش، نتایج بهدستآمده با بهرهبرداری از پیکربندیهای مختلف برای ارجاع جغرافیایی مستقیم بلوک فتوگرامتری گزارش میشود. پارامتر اصلی در نظر گرفته شده برای ارزیابی دقت راه حل های مختلف، RMSE در نقاط کنترلی است که به عنوان CP در پردازش فتوگرامتری استفاده می شود.
R Mاسهایکس=∑ni = 1Δایکسمن2n———√ R Mاسهy=∑ni = 1Δyمن2n———√ R Mاسهz=∑ni = 1Δzمن2n———√آرماسهایکس=∑من=1�Δایکسمن2� آرماسه�=∑من=1�Δ�من2� آرماسه�=∑من=1�Δ�من2�
R Mاسهتیای تی=R Mاسهایکس2+ آر اماسهy2+ آر اماسهz2————————-√آرماسهتی�تی=آرماسهایکس2+آرماسه�2+آرماسه�2
که در آن Δ x i ، Δ y i و Δ z i تفاوت بین مختصات سه بعدی اندازه گیری شده و مختصات محاسبه شده از طریق روش فتوگرامتری هستند و n تعداد GCP ها یا CP های در نظر گرفته شده است.
RMSE به ما این امکان را میدهد که تشخیص دهیم کدام پیکربندیها بهترین نتایج را از نظر دقت موقعیتی ایجاد میکنند، با بررسی سوگیری احتمالی در مؤلفههای x ، y ، و z ، و میتوان از آن برای ارزیابی مقیاس نقشه اسمی محصولات فتوگرامتری ارزش افزوده استفاده کرد (مثلاً ، تصوير ارتودنسي).
3.1. PPK
نتایج رویکرد PPK در دو بلوک مجزا شرح داده میشود: (i) از PPK_1 تا PPK_9 که در آن ایستگاه پایه مورد استفاده برای پردازش PPK در منطقه مورد بررسی قرار دارد (هم به صورت فیزیکی یا مجازی)، و (ii) از PPK_10 تا PPK_15 که در آن داده های به دست آمده از CORSهای واقع در فواصل مختلف از منطقه به عنوان ایستگاه پایه استفاده شد. در جدول 10 ، RMSE در CP ها برای پیکربندی های مختلف نشان داده شده است: خطای اجزای x ، y ، و z و همچنین خطای کل (به فرمول های فوق الذکر مراجعه کنید) گزارش شده است. در شکل 4 ، TOT RMSE در CP برای PPK_1، PPK_3، PPK_6، و PPK_9 نشان داده شده است. PPK2 (ارجاع جغرافیایی مستقیم در آن گنجانده نشده استشکل 4 از آنجایی که مقدار RMSE TOT مربوطه با مرتبه بزرگی متفاوتی مشخص می شود، یعنی > 3 متر).
ستون آخر جدول، استراتژی اتخاذ شده برای تخمین IOP را گزارش میکند: برای بخش عمده راهحلها، خود کالیبراسیون انتخاب شد در حالی که PPK_7 و PPK_8 با استفاده از دو گواهی کالیبراسیون مختلف پردازش شدند. برای PPK_7، خود کالیبراسیون چند ماه قبل از اکتساب در همان منطقه استفاده شد. این خودکالیبراسیون تنها با استفاده از تصاویر نادرال، 11 GCP و ارتفاع پرواز 40 متر به دست آمد (مشخصات این کالیبراسیون در [ 66 گزارش شده است.]). برای PPK_8، یک استراتژی متفاوت آزمایش شد، با استفاده از یک کالیبراسیون در حین کار بر اساس اکتسابهای نادرال و مایل پرواز 1، اما برای پردازش فتوگرامتری، فقط از اکتساب نادرال استفاده شد، زیرا چالشبرانگیزترین پیکربندی برای یک رویکرد ژئوارفرانس مستقیم بود. .
تمام پیکربندیهای مختلف با استفاده از دادههای بهدستآمده از گیرنده Geomax که روی V2000 قرار داده شده بود، بهعنوان ایستگاه پایه پردازش شدند، بهجز PPK_9، که بهعنوان ایستگاه پایه از RINEX مجازی ایجاد شده موقت استفاده میکرد.
با مشاهده RMSE برای پیکربندی از PPK_1 تا PPK_6، می توان تاکید کرد که ادغام تصاویر مایل نقش مهمی در به دست آوردن RMSE کمتر در CP ها ایفا می کند و اجازه می دهد تا دقت سانتی متری بدون هیچ GCP به دست آید. به طور کلی، همانطور که انتظار می رود، واضح است که استفاده از مجموعه داده ای که فقط از تصاویر نادرال تشکیل شده است، می تواند در حین پردازش با دقت در محدوده متر، با مشکلاتی مواجه شود. در واقع، استفاده از تصاویر نادرال بدون استفاده از هیچ گونه GCP میتواند منجر به هندسه ضعیف در اکتساب تخمین IOP با تخمین نادرست پارامترهای کالیبراسیون دوربین، بهویژه برای مولفه فاصله کانونی شود که منجر به سوگیری در جزء z از CP RMSE.
اولین راه حل اتخاذ شده برای کاهش تأثیر این عنصر، استفاده از GCP ها را به دنبال دو استراتژی مختلف پیش بینی می کند: یک GCP واحد در مرکز منطقه یا سه GCP (یکی در مرکز و دو در مرزهای منطقه). تاثیر این راه حل به وضوح در PPK_3 و PPK_4 نشان داده شده است که در آن فقط از تصاویر نادرال استفاده شده است. استفاده از یک GCP در PPK_3 RMSE را از حدود 3 متر به 0.3 متر بهبود بخشید، در حالی که با استفاده از سه GCP، مانند PPK_4، می توان RMSE را تا 0.15 متر بهبود داد.
همانطور که انتظار می رود، هنگامی که تصاویر مایل در طول پردازش با تصاویر نادرال ادغام می شوند، تأثیر GCPها کمتر مشهود است. یک GCP به تنهایی، مانند پیکربندی PPK_5، هیچ تاثیری در RMSE روی CPها ندارد، در حالی که استفاده از سه GCP منجر به کاهش جزئی خطای RMSE به 0.02 متر (PPK_6) شد.
همانطور که در جدول 11 گزارش شده است، علت اصلی مشکلی که برای اولین تنظیمات PPK مورد بررسی قرار گرفت، با تخمین IOP مرتبط بود . اگر پارامترهای تخمین زده شده برای PPK_1 را با پارامترهای تخمین زده شده برای پروازهای نادرال (PPK_2، PPK_3، و PPK_4) مقایسه کنیم، می توان متوجه شد که چگونه فاصله کانونی f متغیرترین پارامتر در این تست ها است. همانطور که در جدول 7 گزارش شده است، استفاده از یک یا سه GCP نتایجی شبیه به تخمین IOP بر اساس ادغام تصاویر مایل و قابل مقایسه با PC_1 و PC_2 خود کالیبراسیون ایجاد کرد.. از سوی دیگر، بدون GCP و پیکربندی فقط نادرال به پیکربندی منجر شد که پارامتر فاصله کانونی را با بدترین دقت تخمین زد. این واقعیت که پیکربندی سه GCP در مقایسه با یک GCP دقیق تر بود، می تواند به دلیل پیکربندی پرواز و توزیع GCP های انتخاب شده در سراسر صحنه باشد.
راهبرد دیگری که میتوان برای مقابله با مسائل ایجاد شده با استفاده از تصاویر نادرال اتخاذ کرد، راهبردی است که از گواهی کالیبراسیون از قبل موجود استفاده میکند. دو آزمایش مختلف انجام شد: PPK_7 و PPK_8. برای PPK_7، استفاده از گواهی کالیبراسیون به دست آمده در طول تجربه قبلی در Castellazzo di Caluso (PC_1) به ما این امکان را میدهد که TOT RMSE مجموعه داده تنها نادرال را بدون GCP از 3 متر (PPK_2) به 0.2 متر کاهش دهیم.
در مورد PPK_8، گواهی کالیبراسیون PC_2 با اتخاذ یک خود کالیبراسیون در محل کار در Venaria به دست آمد. علیرغم محاسبه این کالیبراسیون با استفاده از تصاویر نادرال و مایل، دقت PPK_8 فقط کمی بهتر از PPK_7 بود (0.16 متر برای PPK_8 و 0.2 متر برای PPK_7). نتایج این دو پیکربندی بار دیگر نشان میدهد که فاز کالیبراسیون دوربین چقدر مهم است و چگونه تصاویر مایل میتوانند تأثیر مثبتی بر این مرحله از پردازش فتوگرامتری داشته باشند.
در نهایت، PPK_9، که با ادغام تصاویر نادرال و مایل و با استفاده از RINEX مجازی به عنوان ایستگاه پایه پردازش شد، با RMSE TOT برابر با PPK_1 که با داده های بازیابی شده از Geomax Zenith 35 به عنوان ایستگاه پایه پردازش شد، مشخص شد. . این نتیجه نشان میدهد که با استفاده از یک RINEX مجازی (برونیابی شده از دادههای CORSهای مختلف)، میتوان به همان سطح دقت پیکربندی با بهرهبرداری از گیرنده GNSS در میدان دست یافت. اگر یک شبکه قابل اعتماد از ایستگاه های GNSS دائمی در دسترس باشد، بنابراین می توان از موقعیت یابی یک ایستگاه اصلی GNSS در میدان صرف نظر کرد و مرحله اکتساب را سرعت بخشید و بدون نیاز به استفاده از گیرنده GNSS اضافی.
بلوک دوم نتایج در جدول 12 گزارش شده است، مربوط به پیکربندی (از PPK_10 تا PPK_15) که در آن ایستگاه پایه مورد استفاده برای محاسبه PPK از CORS های SPIN3 GNSS مشتق شده است. ایده پشت این آزمایش ها ارزیابی این بود که چگونه فاصله بین CORS و ناحیه بررسی شده می تواند بر دقت موقعیتی جهت گیری بلوک فتوگرامتری تأثیر بگذارد. CORS انتخاب شده با فاصله از منطقه آزمایش در محدوده 8 کیلومتر تا 80 کیلومتر مشخص می شود.
برای ارزیابی دقت این تنظیمات، از همان تعداد CP (13) استفاده شد. در شکل 5، RMSE در CPها با توجه به فاصله از سایت، از نزدیکترین به دورترین CORS مرتب شده است. همانطور که انتظار می رفت، فاصله از منطقه اکتساب مستقیماً بر مقدار RMSE تأثیر گذاشت، به ویژه در مولفه ارتفاع. لازم به ذکر است که دقت مولفه پلانی متری چند سانتی متر، حتی تا 80 کیلومتر، از ناحیه اکتساب بود، در حالی که دقت خوبی برای مولفه ارتفاع سنجی در محدوده 30 کیلومتری قابل دستیابی بود. با این حال، تجزیه و تحلیل این نتایج با در نظر گرفتن مقیاس نقشه اسمی بررسی بسیار مهم است. برای مثال، دقت PPK_15 (حدود 0.2 متر) همچنان می تواند برای تضمین مقیاس نقشه اسمی 1:1000، حتی با فاصله CORS حدود 80 کیلومتر، کافی باشد.
3.2. NRTK
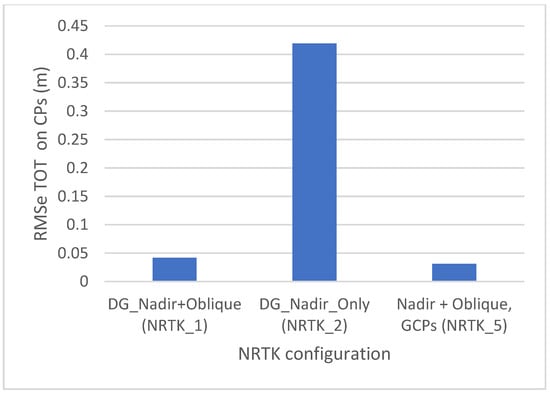
RMSE برای پیکربندی NRTK در جدول 13 نشان داده شده است . شش راه حل مختلف بسته به نوع تصاویر به دست آمده در میدان (نادرال و مایل) و تعداد GCPهای مورد استفاده برای جهت گیری بلوک (0، 1، و 3) آزمایش شدند. برای همه راه حل ها، یک رویکرد خود کالیبراسیون اتخاذ شد.
RMSE TOT در CPها برای پیکربندی های مختلف NRTK (NRTK_1، NRTK_2 و NRTK_5) در شکل 6 نشان داده شده است .
هر شش پیکربندی با RMSE کم در CPها مشخص میشد: تنها استثنا توسط پیکربندی NRTK_2 نشان داده شد که فقط از تصاویر نادرال استفاده میکرد و بدون هیچ GCP پردازش میشد. این پیکربندی منجر به RMSE 0.42 متر، با یک سوگیری واضح در جزء z شد. در مورد پردازش PPK، این خطا مربوط به تخمین اشتباه IOP بود. شایان ذکر است که استفاده از یک GCP برای کاهش RMSE به 0.03 متر کافی است که نتایج آزمون NRTK_4 نشان داد. استفاده از بیش از یک GCP بر دقت جهت گیری بلوک تأثیر قابل توجهی نداشت. در مقایسه با پردازش PPK، تأثیر تصاویر مایل کمتر قابل توجه بود، همانطور که در [ 65] نیز تأیید شد.]. تنها مجموعه داده نادرال NRTK بهتر از مجموعه داده فقط نادرال PPK عمل کرد. این احتمالاً به تخمین بهتر موقعیتهای دوربین در طول پرواز مربوط میشود: با این وجود، آزمایشهای بیشتری برای بررسی این فرضیه مورد نیاز است.
این رفتار همچنین توسط آزمونهای DRTK تأیید شد و میتواند به تغییر شرایط محیطی در حین کسب سه مجموعه داده مرتبط باشد. پرواز 1 با نورپردازی همگن صحنه به دلیل وجود ابر انجام شد در حالی که برای پروازهای 2 و 3 شرایط نوری ناپایدارتر بود. علاوه بر این، پروازهای 2 و 3 نیز تحت تأثیر حضور وزش باد قرار گرفتند. این دو عامل محیطی بر کیفیت تصاویر بدستآمده و در نتیجه مراحل تطبیق تصویر و استخراج ویژگیها، بهویژه برای تصاویر مایل تأثیر گذاشتند.
3.3. DRTK
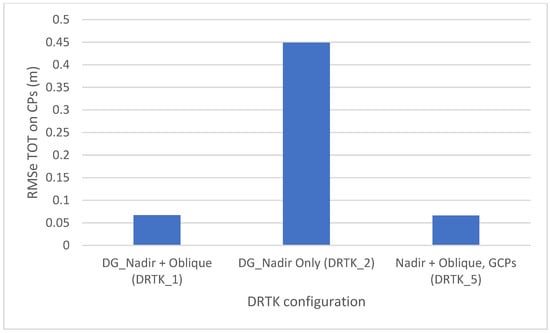
برای پردازش راه حل های مختلف DRTK (از DRTK_1 تا DRTK_6)، ما همان استراتژی را که قبلاً برای رویکرد NRTK استفاده شده بود، اتخاذ کردیم. استراتژی های مختلف پردازش DRTK در جدول 14 خلاصه شده است .
RMSE TOT در CP برای پیکربندی های مختلف DRTK (DRTK_1، DRTK_2 و DRTK_5) در شکل 7 نشان داده شده است .
RMSE رویکرد DRTK با نتایج NRTK قابل مقایسه (کمی بالاتر) بود و تحت تأثیر همان سوگیری قرار میگیرد. علاوه بر این، در این مورد، پیکربندی تنها با تصاویر نادرال و بدون GCP (DRTK_2) تحت تأثیر مقدار RMSE بالاتر بود، در حالی که همه پیکربندیهای دیگر خطاهای مشابهی را ارائه کردند. هیچ تفاوت قابل توجهی بین استفاده از یک یا چند GCP نمی توان گزارش کرد. به دلایلی که قبلاً در بخش قبل ذکر شد، تأثیر تصاویر مایل نیز در این مورد محدود بود.
خلاصه ای از نتایج به دست آمده با اتخاذ راه حل های مختلف زمین مرجع مستقیم در جدول 15 و همچنین بهترین راه حل که ترکیبی از ارجاع جغرافیایی مستقیم و استفاده از چند GCP است (PPK 6) گزارش شده است.
4. بحث و نتیجه گیری
نتایج گزارششده در بخشهای قبلی نشان میدهد که دقت موقعیت سهبعدی مدلهای فتوگرامتری پهپاد تولید شده با استفاده از رویکرد ژئوارفرانس مستقیم زیر ۵ سانتیمتر است زمانی که پارامترهای پرواز و اکتساب معیارهای خاصی را برآورده میکنند. به طور خاص، بهترین سناریو با دقت 3 بعدی 3 سانتی متر مشخص شد، که با استاندارد نقشه برداری ایتالیایی یک مقیاس نقشه اسمی 1:100 (یعنی نقشه برداری در مقیاس نقشه بسیار بزرگ) مطابقت داشت. این نیز مطابق با دقت اعلام شده توسط DJI برای پلت فرم چند روتوری Phantom 4 RTK است که برای آزمایش های ارائه شده در این مقاله استفاده شده است (یعنی دقت افقی مدل های فتوگرامتری تولید شده 5 سانتی متر در ارتفاع پرواز 100 متر و با شرایط روشنایی خوب). با این وجود، برای اتخاذ بهترین راه حل برای یک رویکرد ارجاع جغرافیایی مستقیم، دستورالعمل های خاص باید دنبال شود. تجزیه و تحلیل نتایج ارائه شده در بخشهای قبلی به نویسندگان این امکان را میدهد تا بهترین شیوههای خاص را برای نقشهبرداری سه بعدی مبتنی بر پهپاد با رویکرد ژئوارفرانس مستقیم ایجاد و پیشنهاد کنند. تا آنجا که به برنامه ریزی پرواز مربوط می شود، گنجاندن تصاویر مایل به شدت توصیه می شود زیرا هندسه اکتساب را تقویت می کند و تخمین IOP را افزایش می دهد. همه آزمایشها به وضوح نشان دادند که استفاده از تصاویر نادرال تنها منجر به سوگیری در RMSE در مولفه ارتفاع در مرحله جهتگیری بلوک میشود. هنگامی که تصاویر مایل در دسترس نیستند، این مشکل را می توان با استفاده از یک GCP کاهش داد. این رویکرد با اهداف مصنوعی آزمایش شده است، با این حال، همچنین میتوان آن را با استفاده از ویژگیهای طبیعی دنبال کرد که مختصات آنها را میتوان از تصاویر ارتوی موجود (با دقت مناسب) که منطقه مورد نظر را پوشش میدهد استخراج کرد. در غیر این صورت، میتوان از کالیبراسیون قبلی دوربین نیز استفاده کرد که منجر به دقت کمی کمتر میشود.
به طور کلی، رویکرد PPK منجر به بهترین دقت سه بعدی مرحله جهت گیری بلوک بدون استفاده از GCP ها شد. اثربخشی این رویکرد با اتخاذ انواع مختلف ایستگاههای پایه GNSS مورد آزمایش قرار گرفت. تمام مشاهدات GNSS به دست آمده در این زمینه، داده های به دست آمده از CORS ها، و ایستگاه های GNSS مجازی راه حل های عملی هستند. امکان استفاده از دادههای به دست آمده از شبکه دائمی ایستگاههای ژئودزیکی، کسب سریعتر در میدان و همچنین نیازهای کمتر از نظر ابزار دقیق را امکانپذیر میسازد. لازم به ذکر است که استفاده از RINEX مجازی به همان دقت رویکرد PPK بر اساس یک ایستگاه اصلی GNSS واقع در میدان منجر می شود. اگر یک سرویس ایستگاه مرجع مجازی در دسترس نباشد، مشاهده از یک CORS نیز می تواند استفاده شود، اما بسته به الزامات دقت موقعیت، فاصله بین ایستگاه و سایت باید به دقت در نظر گرفته شود. برای اهداف نقشه برداری در مقیاس بزرگ، ما قویاً استفاده از ایستگاه CORS در محدوده 30 کیلومتری از منطقه بررسی شده را پیشنهاد می کنیم.
تا آنجا که به راهحل RTK مربوط میشود، رویکردهای ارائهشده در این دستنوشته مبتنی بر دو استراتژی متفاوت بود: راهحل NRTK و راهحل RTK، که هر دو در مقایسه با PPK به دقت کمی کمتر (اما هنوز بهتر از 0.07 متر) منجر میشوند. با این وجود، راهحلهای RTK تأثیر مثبتی بر بهموقع بودن مراحل اکتساب و پردازش دادهها دارد.
NRTK به در دسترس بودن شبکه ای از CORS و یک سرویس NTRIP نیاز دارد: بنابراین برای دریافت تصحیحات RTK در زمان واقعی به یک شبکه تلفن همراه پایدار نیاز است. هنگامی که یک یا چند مورد از این شرایط را نمی توان برآورده کرد، امکان اتخاذ رویکرد RTK وجود دارد. راه حل DJI به نام DRTK با استفاده از گیرنده D-RTK 2 GNSS که روی نقطه ای از مختصات شناخته شده تنظیم شده است، آزمایش شد و به ما این امکان را می دهد تا با توجه به موقعیت یابی در یک نقطه ناشناخته به دقت بالاتری برسیم.
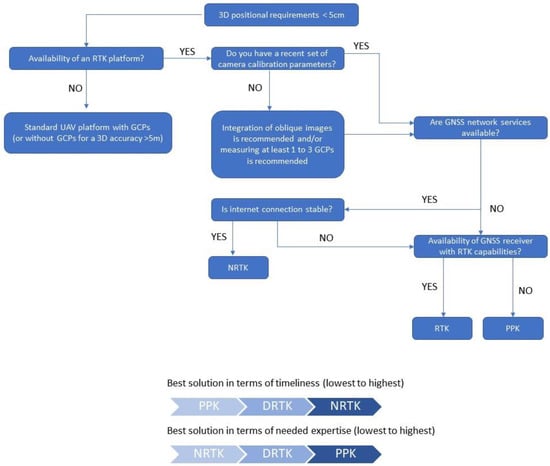
بهترین شیوه های ذکر شده در نمودار جریان نشان داده شده در شکل 8 خلاصه شده است ، همچنین بر اساس تجزیه و تحلیل هزینه-فایده. در قسمت پایین تصویر نیز دسته بندی هایی از رویکردهای مختلف بر اساس عناصر مختلف گزارش شده است.
اولین عنصری که باید در نظر گرفته شود نیاز واقعی یک رویکرد RTK است که باید چندین عامل را در نظر بگیرد، عمدتاً از نظر شرایط محیطی منطقه (دسترسی، ایمنی اپراتورها)، منابع موجود (انسانی و اقتصادی) ، محدودیت های زمانی و بدیهی است که نیاز به دقت نقشه برداری سه بعدی.
نقش مهمی در انتخاب راه حلی که باید اتخاذ شود نیز توسط تجربه اپراتور ایفا می شود. رویکرد PPK به تخصص خاصی در پردازش مشاهدات خام GNSS نیاز دارد (هیچ نرم افزار پردازش کاربر پسند خاصی در حال حاضر موجود نیست). NRTK کمترین تلاش را از منظر اپراتور و همچنین از نظر ابزارهایی برای استقرار در میدان نیاز دارد. (D)RTK مستلزم تلاشهای اضافی (موقعیتیابی یک ایستگاه اصلی GNSS) در حین اکتساب در میدان است، در حالی که پردازش آن سریعتر از PPK است.
با توجه به نتایج ارائه شده، می توان موضوعات تحقیقاتی بیشتری را در رابطه با ارجاع جغرافیایی مستقیم که در آینده نزدیک قابل بررسی است، ترسیم کرد. خودکارسازی عمومی فرآیند، از مرحله اکتساب تا پردازش داده، هنوز مورد نیاز است و میزان تخصص مورد نیاز برای اتخاذ این رویکردها هنوز بالاست. برای بهینه سازی بیشتر هر دو مرحله اکتساب و پردازش، می توان استراتژی های مختلفی را دنبال کرد. کالیبراسیون دوربین همچنین نقش مهمی در مرحله EO (جهت بیرونی) ایفا می کند و دقت راه حلی که از یک IOP از پیش کالیبره شده استفاده می کند هنوز در حال ارزیابی است و نیاز به آزمایش بیشتری دارد.
یک ارزیابی اضافی از دقت ارجاع جغرافیایی مستقیم میتواند بر اساس ارزیابی دقت موقعیتی موقعیتهای دوربین علاوه بر دقت در CP باشد (به عنوان مثال، ردیابی مسیر پهپادها با تکنیکهای توپوگرافی سنتی و منشوری نصب شده بر روی پلتفرم، همانطور که پیشنهاد شد. در [ 73 ] ردیابی پلت فرم همچنین اجازه می دهد تا مسیر پرواز واقعی با توجه به طرح پرواز طراحی شده بررسی شود، که می تواند یک مسئله حیاتی در مناطق دارای موانع و انسداد باشد.
منابع
- کلومینا، آی. Molina, P. سیستم های هوایی بدون سرنشین برای فتوگرامتری و سنجش از دور: یک بررسی. ISPRS J. Photogramm. Remote Sens. 2014 ، 92 ، 79-97. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- نکس، اف. Remondino، F. UAV برای برنامه های نقشه برداری سه بعدی: یک بررسی. Appl. Geomat. 2014 ، 6 ، 1-15. [ Google Scholar ] [ CrossRef ]
- دنگ، ال. مائو، ز. لی، ایکس. هو، ز. دوان، اف. Yan, Y. سنجش از دور چند طیفی مبتنی بر پهپاد برای کشاورزی دقیق: مقایسه بین دوربینهای مختلف. ISPRS J. Photogramm. Remote Sens. 2018 ، 146 ، 124-136. [ Google Scholar ] [ CrossRef ]
- Maes، WH; استپ، ک. چشم اندازهای سنجش از دور با وسایل نقلیه هوایی بدون سرنشین در کشاورزی دقیق. Trends Plant Sci. 2019 ، 24 ، 152-164. [ Google Scholar ] [ CrossRef ]
- ژنگ، اچ. چنگ، تی. ژو، ام. لی، دی. یائو، ایکس. تیان، ی. کائو، دبلیو. Zhu, Y. تخمین بهبود یافته زیست توده برنج در بالای زمین با ترکیب تحلیل بافتی و طیفی تصاویر پهپاد. دقیق کشاورزی 2019 ، 20 ، 611-629. [ Google Scholar ] [ CrossRef ]
- کومبا، ال. بیگلیا، ا. Aimonino، DR; Gay, P. تشخیص بدون نظارت باغات انگور با فتوگرامتری پهپاد سه بعدی نقطه-ابر برای کشاورزی دقیق. محاسبه کنید. الکترون. کشاورزی 2018 ، 155 ، 84-95. [ Google Scholar ] [ CrossRef ]
- آیکاردی، آی. نکس، اف. گرکه، ام. Lingua, A. یک رویکرد مبتنی بر تصویر برای ثبت مشترک مجموعههای داده تصویر پهپاد چندموقت. Remote Sens. 2016 , 8 , 779. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تیل، سی. اشمولیوس، سی. مقایسه ابرهای نقطهای مبتنی بر عکس پهپاد و ابرهای نقطهای مبتنی بر هوابرد بر فراز جنگل از دیدگاه کاربرد جنگلداری. بین المللی J. Remote Sens. 2017 , 38 , 2411–2426. [ Google Scholar ] [ CrossRef ]
- حسن، ا. نصیر، ع.ک. راث، اچ. خان، MF جنگلداری دقیق: شمارش درختان در مناطق شهری با استفاده از تصاویر مرئی بر اساس یک وسیله نقلیه هوایی بدون سرنشین. IFAC-PapersOnLine 2016 ، 49 ، 16-21. [ Google Scholar ] [ CrossRef ]
- گرزناروا، آ. موکروش، م. سورووی، پ. اسلاویک، م. پوندلیک، م. Merganič, J. تخمین قطر تاج از نوع بال ثابت تصاویر UAV. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2019 . [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کامپانا، S. هواپیماهای بدون سرنشین در باستان شناسی. مدرن و چشم اندازهای آینده. آرکائول. چشم انداز. 2017 ، 24 ، 275-296. [ Google Scholar ] [ CrossRef ]
- Stek, TD Drones بر فراز مناظر مدیترانه. پتانسیل پهپادهای کوچک (پهپادها) برای شناسایی مکان و مدیریت میراث در پروژههای بررسی باستانشناسی: مطالعه موردی از Le Pianelle در دره تاپینو، مولیز (ایتالیا). J. Cult. میراث. 2016 ، 22 ، 1066-1071. [ Google Scholar ] [ CrossRef ]
- جورجوپولوس، آ. اویکونومو، سی. آداموپولوس، ای. Stathopoulou، EK ارزیابی سکوهای هوایی بدون سرنشین برای نقشه برداری میراث فرهنگی در مقیاس بزرگ. ISPRS Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2016 ، XLI-B5 ، 355–362. [ Google Scholar ] [ CrossRef ]
- د رئو، ج. تراشه، جی. لالو، پ. de Clercq, W. از بررسی کمهزینه پهپاد تا دادههای توپوگرافی با وضوح بالا: توسعه درک ما از خروجی قرون وسطایی بروژ. آرکائول. چشم انداز. 2016 ، 23 ، 335-346. [ Google Scholar ] [ CrossRef ]
- آدمی، ع. فرگونیز، ال. گالو، ام. هلدر، جی. پپه، م. Treccani، D. Uav Systems Ultra Light for the Metrical Documentation of Cultural Heritage: Applications for Architecture and Archaeology. ISPRS Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2019 ، XLII-2/W17 ، 15–21. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مورتیوسو، ا. گرسن مایر، پ. Freville, T. ضبط و مدلسازی دقیق با فاصله نزدیک از کلیسای نئورومانسک St-Pierre-Le-Jeune در استراسبورگ (فرانسه). بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی طاق ISPRS. 2017 ، 42 ، 519-526. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بولونیزی، م. فورینی، ع. روسو، وی. پلگرینلی، آ. Russo, P. تست پتانسیل rpas کم هزینه در بازسازی میراث فرهنگی سه بعدی. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی طاق ISPRS. 2015 ، 40 ، 229-235. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مانفردا، اس. مک کیب، ام.اف. میلر، PE; لوکاس، آر. پاجوئلو مادریگال، وی. مالینس، جی. بن دور، ای. هلمن، دی. استس، ال. سیرائولو، جی. و همکاران در مورد استفاده از سیستم های هوایی بدون سرنشین برای نظارت بر محیط زیست. Remote Sens. 2018 , 10 , 641. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تورو، FG; Tsourdos, A. حسگرهای پهپاد برای نظارت بر محیط زیست . MDPI AG—موسسه انتشارات دیجیتال چند رشته ای: بازل، سوئیس، 2018. [ Google Scholar ]
- تریپولیتسیوتیس، آ. پروکاس، ن. کیریتسیس، اس. دالاس، ا. پاپافستاتیو، آی. Partsinevelos, P. Dronesourcing: یک پلت فرم پهپاد چند سنسوری ماژولار و قابل ارتقا برای نظارت ترکیبی و بلادرنگ محیطی. بین المللی J. Remote Sens. 2017 , 38 , 2757–2770. [ Google Scholar ] [ CrossRef ]
- گرین، DR; هاگون، جی جی. گومز، سی. Gregory, BJ استفاده از پهپادهای ارزان قیمت برای نظارت بر محیط زیست، نقشه برداری و مدل سازی: نمونه هایی از منطقه ساحلی. در مدیریت سواحل: چالش ها و نوآوری های جهانی الزویر: آمستردام، هلند، 2018; صص 465-501. [ Google Scholar ]
- Gonçalves، GR; پرز، جی. Duarte, J. دقت و اثربخشی UASهای کم هزینه و نرم افزار فتوگرامتری منبع باز برای نقشه برداری پیشین. بین المللی J. Remote Sens. 2018 , 39 , 5059–5077. [ Google Scholar ] [ CrossRef ]
- دوارته، دی. نکس، اف. کرل، ن. Vosselman, G. به سمت تشخیص کارآمدتر آسیب های نما ناشی از زلزله با استفاده از تصاویر مورب UAV. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی طاق ISPRS. 2017 ، 42 ، 93-100. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بوکاردو، پی. چیابراندو، اف. دوتو، اف. تونلو، اف. Lingua، A. تمرین استقرار پهپاد برای اهداف نقشه برداری: ارزیابی کاربردهای واکنش اضطراری. Sensors 2015 , 15 , 15717–15737. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سوتیراکول، سی. کرونپراسرت، ن. کائوموراچارون، ام. پیچایاپان، ص. کاربرد وسایل نقلیه هوایی بدون سرنشین برای نظارت و مدیریت ترافیک عابر پیاده برای خیابان های خرید. ترانسپ Res. Procedia 2017 ، 25 ، 1717-1734. [ Google Scholar ] [ CrossRef ]
- که، ر. لی، ز. تانگ، جی. پان، ز. Wang, Y. برآورد پارامتر جریان ترافیک در زمان واقعی از ویدیوی پهپاد بر اساس طبقهبندی کننده گروه و جریان نوری. IEEE Trans. هوشمند ترانسپ سیستم 2018 ، 20 ، 54–64. [ Google Scholar ] [ CrossRef ]
- هام، ی. هان، KK; لین، جی جی؛ گلپرور فرد، م. پایش بصری سیستمهای زیرساختی غیرنظامی از طریق وسایل نقلیه هوایی بدون سرنشین مجهز به دوربین (UAVs): بررسی آثار مرتبط. Vis. مهندس 2016 ، 4 ، 1. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- مورگنتال، جی. هالرمن، ن. ارزیابی کیفیت وسایل نقلیه هوایی بدون سرنشین (UAV) بر اساس بازرسی بصری سازه ها. Adv. ساختار. مهندس 2016 ، 17 ، 289-302. [ Google Scholar ] [ CrossRef ]
- Carbonneau، PE; دیتریش، JT فتوگرامتری غیر متریک مقرون به صرفه از sUAS درجه مصرف کننده: مفاهیمی برای ارجاع جغرافیایی مستقیم ساختار از فتوگرامتری حرکتی. زمین گشت و گذار. روند. Landf. 2017 ، 42 ، 473-486. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- جیونز، اف. Brem, A. از اسباب بازی ها تا ابزار: تکامل مشترک پیشرفت های تکنولوژیکی و کارآفرینی در صنعت هواپیماهای بدون سرنشین. اتوبوس. هوریز. 2017 ، 60 ، 875-884. [ Google Scholar ] [ CrossRef ]
- استوکر، سی. بنت، آر. نکس، اف. گرکه، ام. Zevenbergen, J. بررسی وضعیت فعلی مقررات پهپاد. Remote Sens. 2017 , 9 , 459. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Regolamento, EN Mezzi Aerei A Pilotaggio Remoto, Edizione 3 del 11 نوامبر 2019. 2019. در دسترس آنلاین: https://www.enac.gov.it/news/regolamento-mezzi-aerei-pilotaggio-remoto-ed-3-dell11 -نوامبر-2019 (در 30 سپتامبر 2020 قابل دسترسی است).
- پپا، ام وی؛ هال، جی. گودیر، جی. Mills, JP Photogrammetric ارزیابی و مقایسه سیستمهای هواپیمای کوچک بدون سرنشین dji phantom 4 pro و phantom 4 rtk. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی طاق ISPRS. 2019 ، 42 ، 503-509. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Palanirajan, HK; السادیک، بی. نکس، اف. Elberink، SO برنامه ریزی پرواز کارآمد برای بازسازی 3 بعدی نمای ساختمان. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی طاق ISPRS. 2019 ، 42 ، 495-502. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هرناندز-لوپز، دی. فیلیپه گارسیا، بی. گونزالس-آگیلرا، دی. آریاس پرز، بی. رویکردی خودکار به برنامه ریزی و کنترل پرواز پهپاد برای کاربردهای فتوگرامتری. فتوگرام مهندس Remote Sens. 2013 ، 79 ، 87-98. [ Google Scholar ] [ CrossRef ]
- آیکاردی، آی. چیابراندو، اف. گراسو، ن. لینگوا، ا. نواردو، اف. اسپانو، فتوگرامتری پهپاد AT با تصاویر مایل: اولین تحلیل در مورد جمع آوری و پردازش داده ها. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی طاق ISPRS. 2016 ، 41 ، 835-842. [ Google Scholar ] [ CrossRef ]
- بولکاس، دی. ارزیابی تعداد GCP و فاصله جداسازی برای بررسیهای UAS کوچک با و بدون موقعیتیابی GNSS-PPK. J. Surv. مهندس 2019 ، 145 ، 1-17. [ Google Scholar ] [ CrossRef ]
- Tonkin، TN; شبکههای کنترل زمینی Midgley، NG برای بازسازی سطح مبتنی بر تصویر: بررسی طرحهای بررسی بهینه با استفاده از تصاویر مشتق شده از پهپاد و فتوگرامتری ساختار از حرکت. Remote Sens. 2016 , 8 , 786. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آگوئرا-وگا، اف. کارواخال رامیرز، اف. Martínez-Carricondo، P. ارزیابی دقت نقشه برداری فتوگرامتری بر اساس تغییرات تعداد نقاط کنترل زمینی با استفاده از هواپیمای بدون سرنشین. Meas. J. Int. Meas. اعتراف کرد. 2017 ، 98 ، 221-227. [ Google Scholar ] [ CrossRef ]
- توث، سی. جوزکوف، جی. Grejner-Brzezinska, D. Mapping with Small UAS: A Point Cloud Accuracy Assessment. J. Appl. Geod. 2015 ، 9 ، 213-226. [ Google Scholar ] [ CrossRef ]
- گاشپارویچ، م. Gajski, D. روش کالیبراسیون دوربین دو مرحله ای برای میکرو پهپاد توسعه یافته است. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی طاق ISPRS. 2016 ، 41 ، 829-833. [ Google Scholar ] [ CrossRef ]
- یوسف، آر. عارف، MFM; ادریس، ک.م. مجید، ز. دقت کالیبراسیون دوربین چونگ، AK در ارتفاعات مختلف پرواز پهپاد. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی طاق ISPRS. 2017 ، 42 ، 595-600. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- اسکارلاتوس، دی. پروکوپیو، ای. استاورو، جی. گرگوریو، ام. ارزیابی دقت حداقل نقاط کنترل برای عکاسی با پهپاد و ارجاع جغرافیایی. در اولین کنفرانس بین المللی سنجش از دور و اطلاعات جغرافیایی محیط زیست (RSCy2013) ؛ انجمن بین المللی اپتیک و فوتونیک: بلینگهام، WA، ایالات متحده آمریکا، 2013; جلد 8795، ص. 879514. [ Google Scholar ]
- پپا، ام وی؛ میلز، جی پی. مور، پی. میلر، PE; Chambers، JE ثبت نام و کالیبراسیون خودکار در فتوگرامتری SfM برای تشخیص تغییرات زمین لغزش. زمین گشت و گذار. روند. Landf. 2019 ، 44 ، 287-303. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Martínez-Carricondo، P. آگوئرا-وگا، اف. کارواخال رامیرز، اف. Mesas-Carrascosa، FJ; گارسیا-فرر، آ. پرز-پوراس، ارزیابی FJ دقت نقشه برداری فتوگرامتری پهپاد بر اساس تغییرات نقاط کنترل زمین. بین المللی J. Appl. زمین Obs. Geoinf. 2018 ، 72 ، 1-10. [ Google Scholar ] [ CrossRef ]
- کوچی، DA; رهاک، م. Skaloud, J. تنظیم بسته نرم افزاری با مشاهدات اینرسی خام در کاربردهای پهپاد. ISPRS J. Photogramm. Remote Sens. 2017 ، 130 ، 1-12. [ Google Scholar ] [ CrossRef ]
- گبرلیک، پ. لا کور-هاربو، آ. کالودوا، پ. زالود، ل. جاناتا، ص. کالیبراسیون و ارزیابی دقت در یک سیستم ارجاع جغرافیایی مستقیم برای فتوگرامتری UAS. بین المللی J. Remote Sens. 2018 , 39 , 4931–4959. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Brown, D. Decentraling Distortion of Lenses. عکس. مهندس 1966 ، 32 ، 444-462. [ Google Scholar ]
- Brown, D. کالیبراسیون دوربین با برد نزدیک. فتوگرام مهندس 1971 ، 37 ، 855-866. [ Google Scholar ]
- Fraser, C. دوربین دیجیتال خود کالیبراسیون. ISPRS J. Photogramm. Remote Sens. 1997 ، 52 ، 149-159. [ Google Scholar ] [ CrossRef ]
- مک گلون، آر. میخائیل، ج. بتل، ای. Mullen, J. Manual of Photogrammetry. در مهندسی فتوگرامتری و سنجش از دور ; انجمن آمریکایی فتوگرامتری و سنجش از دور: 425 Barlow Place, Bethesda: Rockville, MD, USA, 2004; جلد 79، ص. 397. [ Google Scholar ]
- گنیس، ع. میلز، جی پی. کالیبراسیون و اعتبارسنجی دوربین فتوگرامتری میلر، PE در پرواز از طریق لیدار مکمل. ISPRS J. Photogramm. Remote Sens. 2015 ، 100 ، 3-13. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Honkavaara, E. In-Flight Camera Calibration For Direct Georeferenceing Abstract: R. Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2000 ، 2004 ، 166-172. [ Google Scholar ]
- هاروین، اس. لوسییر، آ. آزبورن، جی. تأثیر روش کالیبراسیون بر دقت ابرهای نقطهای که با استفاده از استریوپسیس چند نمای وسیلهای هوایی بدون سرنشین به دست میآیند. Remote Sens. 2015 ، 7 ، 11933–11953. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژانگ، اچ. آلدانا جاگ، ای. کلاپویت، اف. ویلکن، اف. Vanacker, V. ارزیابی پتانسیل ژئو ارجاع مکانیکی پس از پردازش (PPK) برای فتوگرامتری ساختار از حرکت (SfM) مبتنی بر پهپاد و تشخیص تغییر سطح. زمین گشت و گذار. دین 2019 ، 7 ، 807–827. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- الینگ، سی. کلینگ بیل، ال. Kuhlmann, H. تعیین نگرش GPS/MEMS-IMU تک فرکانس در زمان واقعی پهپادهای سبک وزن. Sensors 2015 , 15 , 26212–26235. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- استوکر، سی. نکس، اف. کووا، م. Gerke, M. ارزیابی کیفیت داده های ترکیبی IMU/GNSS برای ارجاع جغرافیایی مستقیم در زمینه نقشه برداری مبتنی بر پهپاد. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی طاق ISPRS. 2017 ، 42 ، 355-361. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- توماشتیک، جی. موکروش، م. سورووی، پ. گرزناروا، آ. Merganič، J. پهپاد RTK/PPK روش – راه حلی بهینه برای نقشه برداری مناطق جنگلی غیرقابل دسترس؟ Remote Sens. 2019 , 11 , 721. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گبرلیک، ص. استفاده از ژئو ارجاع مستقیم در فتوگرامتری هوایی با میکرو پهپاد. IFAC-PapersOnLine 2015 ، 28 ، 380-385. [ Google Scholar ] [ CrossRef ]
- بناسی، اف. دالآستا، ای. دیوتری، اف. فورلانی، جی. Morra di Cella، U. رونسلا، آر. Santise، M. تست دقت و تکرارپذیری بلوکهای پهپاد جهتگیری با مثلثسازی هوایی با پشتیبانی از GNSS. Remote Sens. 2017 , 9 , 172. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رباح، م. بسیونی، م. غانم، ا. Elhadary, A. استفاده از RTK و VRS در ارجاع مستقیم جغرافیایی تصاویر پهپاد. NRIAG J. Astron. ژئوفیز. 2018 ، 7 ، 220-226. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- اکاسو، دی. نکس، اف. Kerle، N. ارزیابی دقت اندازهگیریهای سینماتیک بلادرنگ (RTK) بر روی وسایل نقلیه هوایی بدون سرنشین (UAV) برای ارجاع مستقیم جغرافیایی. ژئو اسپات. Inf. علمی 2020 ، 23 ، 165-181. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- استرونر، ام. شهری، ر. ریندل، تی. سیدل، ج. Brouček, J. ارزیابی دقت georeferencing یک مدل فتوگرامتری با استفاده از یک کوادروکوپتر با GNSS RTK. Sensors 2020 , 20 , 2318. [ Google Scholar ]
- چیابراندو، اف. Tonolo، FG; Lingua، A. Uav رویکرد زمین مرجع مستقیم در یک زمینه نقشه برداری اضطراری. مطالعه موردی زلزله 2016 ایتالیا مرکزی. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی طاق ISPRS. 2019 ، 42 ، 247-253. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Losè, LT; چیابراندو، اف. Tonolo، FG آیا نقاط کنترل زمینی اندازهگیری شده هنوز در نقشهبرداری در مقیاس بزرگ مبتنی بر پهپاد مورد نیاز است؟ ارزیابی دقت موقعیت یک پلت فرم چند روتور Rtk. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی طاق ISPRS. 2020 ، XLIII-B1-2 ، 507–514. [ Google Scholar ]
- راهنمای کاربر Phantom 4 RTK, v2.2 ; DJI: شنژن، چین، 2020.
- راهنمای کاربر D-RTK 2 ; DJI: شنژن، چین، 2020.
- تادیا، ی. استچی، اف. Pellegrinelli، A. استفاده از پهپاد dji phantom 4 rtk برای نقشه برداری توپوگرافی مناطق ساحلی. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی طاق ISPRS. 2019 ، 42 ، 625-630. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- تادیا، ی. استچی، اف. Pellegrinelli، A. نقشه برداری ساحلی با استفاده از DJI Phantom 4 RTK در حالت سینماتیک پس پردازش. هواپیماهای بدون سرنشین 2020 ، 4 ، 9. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- ژائو، بی. لی، جی. وانگ، ال. Shi, Y. ارزیابی دقت موقعیت یابی یک UAS تجاری RTK. در سیستمهای سنجش خودکار هوا و زمین برای بهینهسازی کشاورزی و فنوتیپ V ; انجمن بین المللی اپتیک و فوتونیک: فلوریدا، فلوریدا، ایالات متحده آمریکا، 2020؛ جلد 1141409، ص. 8. [ Google Scholar ]
- Cornaglia, P. Il Tempio di Diana: Giardini Italiani e Confronti Europei. 2010، صفحات 247-264. در دسترس آنلاین: https://www.torrossa.com/it/resources/an/4479316 (در 30 سپتامبر 2020 قابل دسترسی است).
- فورلانی، جی. آستا، ED; دیوتری، اف. مورا، یو. شناسه، RR; Santise، M. ارزیابی کیفیت DSMهای تولید شده از پروازهای پهپاد با موقعیتیابی RTK روی برد. Remote Sens. 2018 , 10 , 311. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Ćwiąkała، P. روش آزمایش مسیر وسایل نقلیه هوایی بدون سرنشین (UAVs) در ماموریت های خودکار. Appl. علمی 2019 ، 9 ، 3488. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
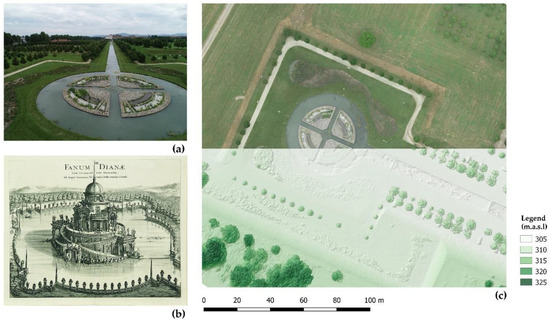
شکل 1. منطقه معبد دیانا. یک تصویر هوایی از منطقه ( a )، یک نمایش قرن هجدهم ( b ) و یک عصاره از DSM و تصویر ارثی منطقه ( c ).

شکل 2. دو راس شبکه ( a ، مثلث های قرمز) و مجموعه نقاط کنترل ( a ، نقاط زرد). برخی از مراحل اندازه گیری در میدان ( b ، c ).
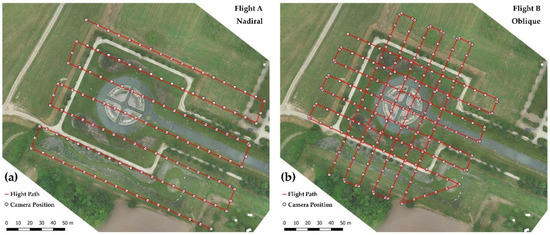
شکل 3. نقشه پرواز پروازهای انجام شده در Tempio di Diana. پرواز A با پیکربندی دوربین نادرال ( a ) و پرواز B با پیکربندی دوربین مایل ( b ).
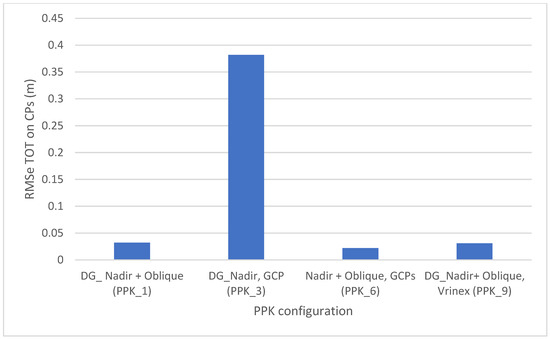
شکل 4. RMSE TOT در CP برای پیکربندی های مختلف PPK (PPK_1، PPK_3، PPK_6، و PPK_9).
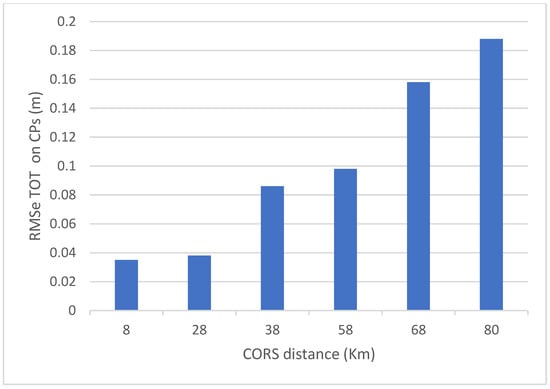
شکل 5. RMSE TOT از CPها برای پیکربندی از PPK_10 تا PPK_15.
شکل 6. RMSE TOT CP برای پیکربندی های مختلف NRTK (NRTK_1، NRTK_2، و NRTK_5).
شکل 7. RMSE TOT CP برای پیکربندی های مختلف DRTK (DRTK_1، DRTK_2، و DRTK_5).
شکل 8. فلوچارت که بهترین رویکردهای عملیاتی را بسته به الزامات دقت نقشه و راه حل های تکنولوژیکی موجود خلاصه می کند.


بدون دیدگاه