1. معرفی
در دهه اخیر، سکوهای تجسم اطلاعات جغرافیایی بالای زمین در زمینه های مختلف ساخته شده است [ 1 ، 2 ، 3 ، 4 ، 5 ]. به دلیل پنهان بودن فضای زیرزمینی، تشخیص خطرات زمینی زیرزمینی در جاده های شهری یک مشکل دشوار در سراسر جهان است. مشکل در ایجاد یک گردش کار کامل و پلتفرم یکپارچه جمع آوری داده ها، پیش پردازش داده ها، تفسیر داده ها، مدل سازی سه بعدی (3D) و تجسم نتایج تفسیر شده نهفته است. هر ساله گزارش می شود که خسارات اموال گسترده و گرانقیمت ناشی از ریزش جاده عمدتاً ناشی از مخاطرات مختلف زمینی زیرزمینی است [ 6]]. حوادث فروریختن در مناطق شهری نه تنها می تواند جان و دارایی انسان ها را تهدید کند، بلکه می تواند منجر به آسیب به زیرساخت های مجاور، مانند تاسیسات ارتباطی یا زهکشی، در فضای زیرسطحی اطراف منطقه ریزش شود [7 ] . اگرچه فناوری رادار نافذ زمینی (GPR) زمین شناسان را قادر می سازد مکانیسم تکامل را بررسی کنند و اقداماتی را برای جلوگیری از خطرات زمینی زیرزمینی در جاده های شهری اتخاذ کنند، اما افزایش کیفیت داده های GPR از پیش پردازش شده، که در آن داده های تولید شده می تواند بر دقت تشخیص خطرات زمین تاثیر مستقیم بگذارد، هنوز یک مشکل است. مشکل قابل توجه علاوه بر این، مدل سازی سه بعدی و تجسم مخاطرات زمینی زیرزمینی می تواند کنترلی برای ارائه و تجزیه و تحلیل خطرات زمین فراهم کند. با ایده پرداختن به برخی از این محدودیت ها، برخی از مقالات تحقیقاتی [ 8, 9 , 10 , 11 , 12 , 13 , 14 , 15 , 16 , 17 , 18 , 19 , 20 , 21 , 22 , 23 , 24] راه های مختلفی را برای تجسم اطلاعات از فضای زیرزمینی مورد بحث قرار داده اند. اینها کمک های مهمی به طراحی معماری سیستم های اطلاعاتی زیرزمینی و روش های نمایش مرتبط سازه های زیرزمینی کرده اند. با این حال، آنها فقط می توانند یک نمایش مدل از فرآیند عملیات زیرساخت های زیرزمینی را از نقشه های طراحی و ساخت موجود ارائه دهند [ 8 ، 14 ، 15 ، 19 ، 20 ، 21 ، 22 ]. در واقع، این طرحهای نمایشی زیرساختهای زیرزمینی (مثلاً خطوط لوله) ممکن است به دلیل توسعه و تغییر جادههای شهری کاملاً متفاوت از شرایط واقعی در زمین باشد. برخی از آثار [9 ، 10 ، 17 ، 18 ، 23 ] از دادههای GPR برای تجسم فضای دو بعدی استفاده کردند، اما سیستمهای آنها نمیتوانند صحنههای سه بعدی (3D) بصری بسازند و نمیتوانند اقدامات متقابل را به دقت ارزیابی کنند. اخیراً، Mauricio [ 24 ] یک گردش کار پردازش دادههای GPR را برای ایجاد مدلهای سهبعدی ساختارهای لولهای زیرسطحی پیشنهاد کرد که از فناوریهای بازسازی و بهبود تصویر استفاده میکردند. تحقیقات دیگر [ 11 ، 12 ، 13 ، 16 ] از GPR سه بعدی برای ساخت صحنه های سه بعدی استفاده کردند که از نرم افزارهای تجاری استفاده می کردند.
با الهام از تحقیقات قبلی و قابلیتهای نرمافزار تجاری، ما یک چارچوب سهبعدی جامع را برای سازماندهی گردش کار تشخیص خطرات زمینی زیرزمینی پیشنهاد میکنیم. این مطالعه بر اساس تجهیزات GPR خود توسعهیافته تیم تحقیقاتی ما، یک چارچوب تجسم سه بعدی تعاملی برای تشخیص خطر زمینهای زیرزمینی در جادههای شهری به نام 3DVF4UDR ارائه میکند که ابزار GPR و پلتفرمهای تجسم موجود را عمیقاً تکمیل میکند. چارچوب توسعهیافته میتواند جزئیات پیادهسازی عملی را در اختیار مهندسان اطلاعات جغرافیایی قرار دهد. مشارکت های اصلی این مقاله عبارتند از:
- (1)
-
ما چارچوبی را ارائه کردیم که فرآیندهای تشخیص را در یک جریان کاری ادغام میکند، از جمله اکتساب داده، پیش پردازش، مدلسازی، تجسم و تشخیص و تجزیه و تحلیل مخاطرات جغرافیایی تعاملی. اکتساب داده ها بر اساس تجهیزات GPR که خود توسعه یافته است. فرمتهای داده و فرمتهای جفتشده آزاد باعث میشوند تا چارچوب دادهها را به روشی انعطافپذیر بارگذاری کند. جزئیات در بخش 3.1 توضیح داده شده است .
- (2)
-
در این چارچوب، یک سری از الگوریتمهای جدید پیشنهادی، پشتیبانی نظری برای فرآیندهای شناسایی، از جمله روشهای انتخاب دادههای الگوریتم کریجینگ، الگوریتم بهبود یافته GPU-PSO-Kriging و الگوریتم شبکه نامنظم مثلثی محدود شده با لایه (TIN) ارائه میکنند. اینها نه تنها میتوانند پیشپردازش دادههای GPR را سریعتر و دقیقتر کنند، بلکه میتوانند بدنههای مخاطرهای با اشکال دلخواه را به صورت جزئی یا کلی بسازند. شرح مفصلی از این چارچوب در بخش 3.2 ، بخش 3.3 ، بخش 3.4 فرموله شده است و نتایج تجسم در بخش 4 توضیح داده شده است .
- (3)
-
در این کار، ما نه تنها یک تحلیل نظری و تأیید تجربی برای چارچوب با الگوریتمهای مرتبط ارائه کردیم، بلکه یک سیستم پلت فرم را برای آزمایش اثربخشی چارچوب پیشنهادی و الگوریتمهای آن در بعد عملی ایجاد کردیم.
بقیه این کار به شرح زیر تنظیم شده است. بخش 2 یک نمای کلی از کار موجود بر روی اکتساب داده های GPR، پیش پردازش داده ها، و روش های مدل سازی و تجسم سه بعدی ارائه می کند. توضیحات جامع 3DVF4UDR در بخش 3 مورد بحث قرار می گیرد ، جایی که الگوریتم های پیشنهادی در مراحل مختلف گردش کار به تفصیل مورد بحث قرار می گیرند در حالی که بخش 4 اجرای سیستم 3DVF4UDR را نشان می دهد که الگوریتم های جدید پیشنهادی را ادغام می کند و اثرات کاربردی این الگوریتم ها را نشان می دهد. بخش 5 نتیجه گیری را برای تحقیق ارائه می دهد و پتانسیل کار آینده را مورد بحث قرار می دهد.
2. آثار موجود
در این بخش، کارهای تحقیقاتی مرتبط با فناوری های مورد استفاده در 3DVF4UDR را مورد بحث قرار می دهیم. 3DVF4UDR داده های خود را از طریق ابزارهای GPR به دست می آورد. بخش 2.1 ابزارهای اصلی را معرفی می کند و مزایای استفاده از تجهیزات خودساخته ما را مورد بحث قرار می دهد. داده های خام GPR باید برای مدل سازی بیشتر از قبل پردازش شوند. بخش 2.2 الگوریتم کریجینگ را مورد بحث قرار می دهد و روش های پیشنهادی ما را تشریح می کند. برای مدلسازی زمینشناسی سهبعدی، مدلهای اصلی زمینشناسی و الگوریتم پیشنهادی ما در بخش 2.3 مورد بحث قرار گرفتهاند .
2.1. جمع آوری داده های GPR
با توجه به سرعت بالای ساخت و ساز جاده های شهری در چند دهه اخیر، نگهداری راه ها به یک موضوع بسیار مهم تبدیل شده است. فروریختن جاده یکی از مشکلات اصلی است و میتواند ویژگیهای مختلفی را نشان دهد، مانند پنهانبودن، ناهنجاری، عود و رخ دادن گروهی [ 6 ]. ریزش ها عمدتاً توسط خطرات زمینی مختلف در زیر بستر جاده ایجاد می شوند که تشخیص آنها دشوار است. تعمیر و نگهداری موثر جاده به روش های بازرسی فوری و مقرون به صرفه برای کاهش خرابی جاده نیاز دارد. GPR فناوری اصلی برای بازرسی زیرسطحی جاده است [ 9]، زیرا می تواند داده های نظرسنجی عمومی را در مدت زمان نسبتاً کوتاهی بدست آورد. دستگاه های GPR مختلف توسط شرکت ها و موسسات تحقیقاتی مختلف طراحی شده اند، به عنوان مثال، سری SIR GPR (Geophysical Survey Systems Inc., GSSI)، سری Pulse EKKO GPR (Canada Sensor & Software Inc., SSI)، Explore GPR (Italy INGEGNERIA DEI). شرکت SISTEMI (IDS)، LTD GPR (موسسه تحقیقاتی انتشار امواج رادیویی چین، CRIRP)، و سری GR-Radar GPR (تیم تحقیقاتی ما).
همانطور که در شکل 1 نشان داده شده است، GPR ما پالس الکترومغناطیسی با فرکانس بالا را به سمت زیرزمین می فرستد. زمان سفر دو طرفه، 50 نانوثانیه برای GPR ما، زمان بین خروج از فرستنده و بازگشت به گیرنده برای پالس است. هنگامی که پالس در طول انتشار با یک رابط دی الکتریک با گذردهی نسبی متفاوت برخورد می کند، بخشی از پالس به سطح منعکس می شود و موج بازتاب شده نیز می تواند توسط گیرنده دریافت شود. در طول 50 نانوثانیه، امواج منعکس شده 512 (یا 1024) بار با فاصله زمانی مساوی دریافت خواهند شد و 512 (یا 1024) نقطه نمونه تولید می کنند. بعد از اینکه تمام 512 (یا 1024) نقطه نمونه در یک موقعیت افقی جمع آوری شد، GPR نمونه های جدید را در موقعیت افقی بعدی جمع آوری می کند تا زمانی که به همه موقعیت ها در یک منطقه از پیش تعریف شده برسد. GPR ما هشت کانال دارد [ 25] و سرعت تشخیص می تواند به 60 کیلومتر در ساعت برسد که با سایر دستگاه های GPR قابل مقایسه است. داده های به دست آمده و قالب در بخش 3.1.3 مورد بحث قرار خواهد گرفت .
2.2. پیش پردازش داده های GPR
به طور کلی، GPR فقط داده های خط نظرسنجی را تولید می کند که باید برای به دست آوردن داده های جامع تری که کل منطقه شناسایی شده را پوشش می دهد، پیش پردازش شود. از بین تمام روشهای پیش پردازش شده مورد استفاده برای آشکارسازی نظریه همبستگی ساختار فضایی و تصادفی [ 26 ]، الگوریتم کریجینگ یکی از پرکاربردترین فناوریها است. تحقیقات فعلی بر روی این الگوریتم بر ترکیب انواع مختلف روشهای کریجینگ [ 27 ، 28 ، 29 ، 30 ] یا بر هیبریداسیون بین کریجینگ و سایر الگوریتمها، مانند الگوریتم بهینهسازی بیونیک [ 31 ، 32 ، 33 تمرکز دارد.]، روش ماشین بردار پشتیبان [ 34 ]، روش حداقل مربعات [ 35 ] و اطلاعات گرادیان [ 36 ]. تا آنجا که ما می دانیم، تنها چند مقاله در مورد چگونگی انتخاب نقاط داده برای درون یابی بحث کرده اند، که پیش نیازی است که بر دقیق بودن یا نبودن نتایج درونیابی کریجینگ تاثیر می گذارد. ما دو الگوریتم انتخاب نقاط نمونه جدید (به نامهای D3DGC و DRD) را در کار قبلی پیشنهاد کردهایم [ 37]] که باید در این مطالعه ادغام شود. علاوه بر این، ما همچنین یک الگوریتم GPU-PSO-Kriging را پیشنهاد میکنیم که از یک معماری دستگاه یکپارچه محاسبه (CUDA) برای اجرای یک الگوریتم بهینهسازی ازدحام ذرات (PSO) به صورت موازی و یک PSO که پارامترها را در الگوریتم کریجینگ بهمنظور درونیابی بهینه میکند، استفاده میکند. داده ها با دقت بیشتری همه این فعالیت ها در بخش 3.2 مورد بحث قرار گرفته است .
2.3. مدل سازی سه بعدی زمین شناسی
مدل سازی سه بعدی زمین شناسی یک فرآیند انتزاعی است که شامل بازسازی و بازتولید اجسام زمین شناسی از طریق فناوری های تجسم سه بعدی است [ 38 ]. پیچیدگی روابط فضایی زمین شناسی، پیچیدگی ساختار داده، روابط توپولوژیکی و الگوریتم های مربوطه را افزایش می دهد که مدل سازی زمین شناسی را بسیار دشوار می کند [ 39 ]. مدل های زمین شناسی سه بعدی زیادی وجود دارد [ 40 ، 41]، مانند شبکه نامنظم مثلثی (TIN)، منشور مثلثی (TP)، منشور مثلثی آنالوگ (ATP)، منشور مثلثی تعمیم یافته (GTP)، منشور مثلثی راست آنالوگ (ARTP)، شبکه چهار وجهی (TEN)، و غیره. در مقایسه با مدلهای دیگر، TIN تنها نمیتواند اندازه و تعداد تکههای مثلثی را با توجه به پیچیدگی سطح زمینشناسی تغییر دهد، بلکه میتواند افزونگی دادهها را در مرحله تجسم حذف کند و دقت مناسب را حفظ کند [37 ] . تحقیقات فعلی در مورد ساخت TIN [ 42 ، 43 ، 44 ، 45 ، 46 ، 47 ، 48] فرض میکند که مجموعه نقطهای از دادههای گسسته ثابت است و به ندرت درباره نحوه مدیریت نقاط داده پویا در سطوح مختلف بحث میکند، به این معنی که همه نقاط داده با هم مدیریت میشوند نه ایجاد اتصالات لایه به لایه. یک الگوریتم لایه محدود TIN (LC-TIN) در کار قبلی [ 49 ] برای ساخت بدنه های سه بعدی از لایه ای به لایه دیگر پیشنهاد شد. جزئیات LC-TIN در بخش 3.3 مورد بحث قرار گرفته است .
3. اصل 3DVF4UDR
در این بخش، با ارائه یک توضیح کلی از 3DVF4UDR، از جمله معماری، گردش کار مربوطه و تعریف فرمتهای فایل، شروع میکنیم. سپس الگوریتم های پیشنهادی در 3DVF4UDR در مراحل گردش کار زیر به طور عمیق مورد بحث قرار می گیرند.
3.1. شرح کلی 3DVF4UDR
معماری لایه ای 3DVF4UDR آن را انعطاف پذیر می کند تا بتواند مراحل گردش کار را پیکربندی کند. فرمتهای فایل خود تعریف شده تضمین میکنند که 3DVF4UDR میتواند به راحتی نتایج تفسیر شده را ذخیره یا بارگذاری کند.
3.1.1. معمار
همانطور که در شکل 2 توضیح داده شد، معماری 3DVF4UDR از مشخصات Model-View-Controller (MVC) شامل لایه منابع، لایه دسترسی به خدمات، لایه منطق تجاری و لایه ارائه استفاده می کند. تقسیم لایه می تواند توابع برنامه های مختلف را در کانتینرهای مختلف کپسوله کند که به 3DVF4UDR انعطاف پذیری و نگهداری بالایی می دهد.
لایه ارائه، رابط تعاملی چارچوب را به کاربران محصور می کند. داده های نتیجه اصلی و میانی یا نهایی GPR در نماهای 2 بعدی/3 بعدی نمایش داده می شوند و توابع چارچوب به عنوان پنجره های مختلف سازماندهی می شوند. لایه منطق تجاری وظیفه ارسال منطق سیستم را بر عهده دارد. به عنوان مثال، مؤلفه زمانبندی الگوریتم وظیفه ارسال یک سری الگوریتمها از جمله GPU-PSO-Kriging ، LC-TIN ، D3DGC ، DRD و غیره را بر عهده دارد. موتور رندر توسط OpenGL پیاده سازی شده است که می تواند رندر 2D/3D و محاسبات CUDA را اجرا کند. جزء ابزارهای خود تعریف شده دارای یک جزء فرعی ArcBall است که می تواند جهت حرکت و زوم اشیاء سه بعدی را کنترل کند.مؤلفه فرعی MathUtils برای تحقق توابع ریاضی رایج، اجزای فرعی کنترل RichTree و RichList که خود توسعه یافته است. داده ها، مدل، فرآیند و اجزای مدیریت رندر مشتق شده و در کانتینر مدیریت ارسال می شوند. در لایه دسترسی به خدمات، یک رابط ورودی/خروجی از داده های اصلی، میانی یا نهایی مختلف وجود دارد. انواع مختلف داده های پایه و پیچیده در محفظه نوع داده تعریف شده است. در نهایت، داده های خام، پردازش شده و مدیریتی در یک پایگاه داده یا سیستم فایل در لایه منابع ذخیره می شوند.
3.1.2. شرح گردش کار
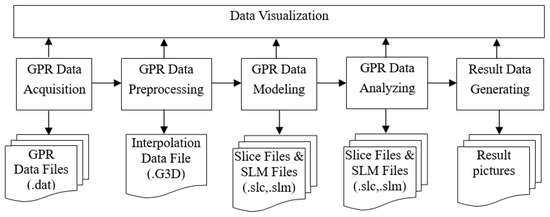
3DVF4UDR کل فرآیند شناسایی خطرات زمینی زیرزمینی را ادغام می کند. گردش کار را می توان در شکل 3 توصیف کرد که شامل تمام عملیات از اکتساب داده تا تولید نتیجه است و فرآیند قبلی به عنوان پیش نیاز فرآیند بعدی عمل می کند. دادههای هر مرحله را میتوان توسط موتور رندر مشاهده کرد، از جمله دادههای خام GPR (ذخیرهشده به عنوان فایلهای txt. و .dat )، دادههای درونیابی ( فایلهای .G3D )، دادههای برش ( slc. و .slm.فایل ها)، و تصاویر نتیجه نهایی. فرمت های مختلف فایل می توانند نتایج اصلی، میانی و نهایی را به روشی راحت تر تجزیه و تحلیل کنند. آنها داده ها را در لایه دسترسی به خدمات سازماندهی می کنند و اطمینان حاصل می کنند که سیستم می تواند از هر مرحله از عملیات شروع کند.
3.1.3. توضیحات فرمت فایل
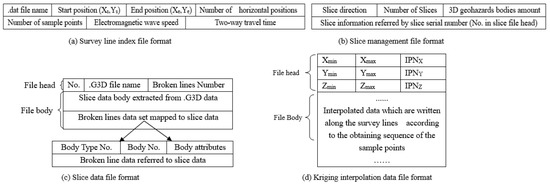
در 3DVF4UDR، برخی از فرمتهای فایل خود تعریف شده برای توصیف منبع GPR و دادههای میانی، از جمله txt .، .dat ، .G3D ، .slc و .slm استفاده میشود . همانطور که در شکل 4 الف توضیح داده شد، یک فایل فهرست خط نظرسنجی ( فایل txt. ) مسئول سازماندهی فایل داده خط نظرسنجی ( فایل .dat ) برای افزایش کارایی انتقال است. فایل .dat به عنوان داده های باینری ذخیره می شود که فقط حاوی مقادیر دامنه های رابط دی الکتریک است که توسط یک موج الکترومغناطیسی جمع آوری شده است. با مختصات شروع (Xs, Ys) و پایان (Xe, Ye) آن در شکل 4 تعریف شده است.آ. علاوه بر این، اطلاعات یکسان تمام دادههای خط بررسی در فایلهای txt ، مانند تعداد موقعیتهای افقی و نقاط نمونه، سرعت موج الکترومغناطیسی و زمان سفر دو طرفه تعریف میشود. همانطور که در شکل 4 d توضیح داده شده است، فایل های داده های خط بررسی را می توان در یک فایل .G3D که شامل تمام اطلاعات تحت پوشش ناحیه تشخیص است، درون یابی کرد. سر فایل .G3D شامل اطلاعات حداقل و حداکثر مقدار در جهت های X، Y، Z و تعداد نقاط درون یابی شده در سه جهت است که به صورت IPNX ، IPNY و IPNZ تعریف می شوند . بدنه .G3Dفایل تمام داده هایی را که در امتداد خطوط پیمایش درون یابی شده اند ذخیره می کند ( شکل 1 ) با توجه به ترتیب بدست آوردن نقاط نمونه. اطلاعات خطرات زمین در یک فایل برش ( فایل slc. ) ذخیره می شود. این داده ها با خطوط شکسته ای که برای برش داده ها نگاشت شده اند انتخاب می شوند. سپس داده های برش از داده های .G3D استخراج می شوند . همانطور که در شکل 4 نشان داده شده استج، چارچوب پیشنهادی از شناسایی اجسام مختلف زمینخطر پشتیبانی میکند که با عناوین مختلف «شماره بدنه»، «شماره بدنه» تعریف میشوند. و “ویژگی های بدن”. “ویژگی های بدن” به انواع بدن مخاطرات زمینی مختلف، به عنوان مثال، حفره های زیرزمینی، آب، یا ترک ها اشاره دارد. “شماره بدنه.” شماره سریال بدنه geohhard است. هر دو “شماره بدنه” و «شماره نوع بدن». می تواند به طور منحصر به فرد نوع خاصی از بدنه خطر زمین را تعیین کند. هر بدنه اطلاعات ویژگی های خاص خود را دارد، مانند رنگ بدنه، شفافیت، فونت و غیره. همه فایل های برش توسط فایل .slm مدیریت می شوند که در شکل 4 ب تعریف شده است. “جهت برش” نشان می دهد که 3DVF4UDR می تواند G3D. را تقسیم کندداده ها را به برش های مختلف با توجه به سطوح مختصات مختلف، مانند صفحات XOY، YOZ، و XOZ. سایر اطلاعات آماری (تعداد برش ها و میزان اجسام خطر زمین شناسی سه بعدی) نیز در فایل مدیریت برش توضیح داده شده است.
با توجه به بحث فوق الذکر، به جز فایل داده های خام و درون یابی ( فایل های .dat و .G3D )، فایل های داده میانی (مثلاً فایل های .slc و .slm ) می توانند بار 3DVF4UDR را در هر زمانی که بخواهند باعث ایجاد اجسام خطر زمین شوند. که می تواند کارایی عملیاتی را افزایش دهد.
بخشهای بعدی برخی از الگوریتمهای مربوط به گردش کار را با جزئیات بیشتر مورد بحث قرار خواهند داد. برای مرحله پیش پردازش داده ها، 3DVF4UDR از الگوریتم های D3DGC و DRD استفاده می کند تا داده های نمونه برای الگوریتم کریجینگ را معقول تر انتخاب کند و از الگوریتم بهینه سازی ازدحام ذرات (PSO) برای بهینه سازی پارامترهای کریجینگ در حالت موازی GPU (به نام GPU-PSO-Kri) استفاده می کند. الگوریتم). در فرآیند مدلسازی دادهها، الگوریتم LC-TIN برای مدلسازی بدنههای خطر زمین از لایهای به لایه دیگر بهعنوان اشکال دلخواه طراحی شد. یک الگوریتم هندسی فضایی برای محاسبه اطلاعات حجمی اجسام خطر زمین در این مرحله از تجزیه و تحلیل داده ها استفاده شد.
3.2. پیش پردازش داده ها
به طور کلی، داده های خط نظرسنجی تولید شده توسط یک ابزار GPR باید برای تولید داده های کافی از قبل پردازش شوند. الگوریتم درون یابی کریجینگ به طور گسترده ای برای انجام این کار استفاده می شود. یک مشکل کلیدی نحوه انتخاب داده های نمونه گیری برای روش کریجینگ است. مطالعه ما یک الگوریتم درون یابی GPU-PSO-Kriging را برای مدیریت داده های خط نظرسنجی اتخاذ کرد. دو الگوریتم انتخاب نقاط نمونه برداری در چارچوب برای افزایش دقت درون یابی استفاده شد، یعنی یک الگوریتم سه بعدی پوشش کره پویا (به نام D3DGC) و یک الگوریتم فاصله معکوس دوگانه (DRD) [37 ] .
3.2.1. الگوریتم های انتخاب نقطه نمونه
انتخاب منطقی داده های نمونه گیری پیش نیازی برای اطمینان از صحت نتایج درونیابی کریجینگ است. لیو و همکاران [ 50 ] پیشنهاد کرد که برخی از عوامل می توانند بر نتایج درون یابی تأثیر بگذارند، از جمله ویژگی های توزیع داده های نمونه برداری شده، اثر قطعه، محدوده و نوع مدل تغییرات، و همچنین ناهمسانگردی و محدوده جستجوی پیکربندی فضا. دنگ و همکاران [ 51] در ادامه خاطرنشان کرد که دادههای نمونهبرداری شده که نزدیک به نقطه تخمین هستند تأثیر زیادی بر ساختار تخمین دارند و در بیشتر موارد باید یک مدل کروی و مدل نمایی انتخاب شود. با این حال، آنها فقط یک قانون کلی برای انتخاب داده های نمونه ارائه کردند و درباره نحوه انتخاب داده های نمونه گیری عمیق بحث نکردند. کار [ 26 ] بر اساس یافتههای آنها در مورد معیار حداقل واریانس، از معیارهای چند فاصلهای برای توصیف ساختارهای فضایی، از جمله فاصله منهتن، فاصله اقلیدسی و اندازهگیری فاصله چبیشف استفاده کرد. با این حال، تحقیقات آنها تنها اندازه گیری فاصله را گسترش داد و مشکل انتخاب داده های نمونه را مورد بحث قرار نداد.
بر اساس تئوری همبستگی داده های زمین شناسی، نقاطی که نزدیک به نقطه درونیابی هستند باید به عنوان نقاط نمونه برداری انتخاب شوند. الگوریتم D3DGC نقاط نمونه برداری را با حرکت دادن یک ناحیه کره ای که نقطه درون یابی شده را به عنوان مرکز در نظر گرفته و شعاع رشد دینامیکی داشت تا زمانی که نیاز کمیت نقاط نمونه برداری را برآورده کند، ایجاد می کند. وقتی مقادیر دادههای خط بررسی مشابه هستند و حجم دادهها بسیار زیاد است، اثرات درون یابی ممکن است بهترین رویکرد زمانی نباشد که فقط به نظریه همبستگی فضا توجه شود. با معرفی تصادفی بودن، روش DRD پیشنهادی، نقاط را به دادههای خطوط پیمایشی مختلف و توزیع نقطهای مرتب شده در هر خط نظرسنجی با توجه به قوانین همبستگی و تصادفی پیشنهادی اختصاص میدهد.
توضیح داده شده است که الگوریتم D3DGC می تواند بهترین تعداد نقاط نمونه، به عنوان مثال، 210 را، با توجه به یک مجموعه داده خاص، رقم بزند [ 37 ]. در مقایسه با روش سنتی که فقط از همسایگان افقی برای درونیابی استفاده می کند، میزان خطا را از 8% به 1.3% کاهش می دهد. وقتی عدد بین 180 و 270 به جای 210 گرفته شود، میزان خطا برای D3DGC فقط تا 10% افزایش می یابد. از سوی دیگر، روشهای سنتی تنها میتوانند برای بخش کوچکی از اعداد انتخابی به 10% یا کمتر برسند و میتوانند تا 31%. دلیل آن این است که D3DGC همبستگی بین نقاط نمونه را در نظر می گیرد و با افزایش تدریجی شعاع، فضای نمونه را در یک ناحیه کروی جستجو می کند. بنابراین، پیچیدگی D3DGC است O(متر∗n∗پ∗تو)، که در آن m، n، p، u به ترتیب تعداد نقاط نمونه، کل نقاط، خطوط بررسی و موقعیت های افقی هستند. یکی دیگر از گزینه های الگوریتم انتخاب نقاط نمونه، DRD است که نرخ خطای کمتری نیز ارائه می دهد. DRD دارای پیچیدگی است O(n∗پ)، که برای نمونه برداری از داده های بزرگ مناسب است.
3.2.2. الگوریتم GPU-PSO-Kriging
الگوریتم درون یابی کریجینگ بهترین روش پیش بینی فضای خطی بی طرفانه [ 52 ] است که بر اساس توزیع تنوع ویژگی های فضا در موقعیت های فضا است. فرض کنید که N نقطه نمونه وجود دارد پتیمن، 1≤من≤نو معادله (1) پیش بینی کریجینگ معمولی را تعریف می کند:
جایی که ز∗(پتی0)مقدار تخمین نقطه درونیابی است پتی0، ز(پتیمن)مقدار من نقطه نمونه برداری پتیمن، و λمنضریب وزنی است پتیمننشان دهنده سهم ز(پتیمن)به ز∗(پتی0). الگوریتم کریجینگ از یک نیمه متغیر برای محاسبه وزن تحت تاثیر نقاط نمونه بر روی نقطه درون یابی استفاده می کند تا برآورد ویژگی خود را محقق کند. در بین تمام نیمه متغیرها، مدل کروی معمولاً در زمین شناسی استفاده می شود [ 51 ] و می توان آن را به شرح زیر توصیف کرد:
جایی که سی0قطعه است، سی0+سیارزش آستانه است، آمحدوده و ساعتافزایش متغیرهای منطقه ای است. به آن اشاره می کنیم ساعتمن،jفاصله بین است پتیمنو پتیj. با توجه به یک تخمین بی طرفانه، معادلات (3) رابطه بین λمنو γ(⋅):
جایی که μضریب لاگرانژ است و γ(⋅)واریوگرام است. بنابراین، رابطه (3) را می توان به عنوان سبک ماتریس زیر توصیف کرد:
با توجه به معادلات (3) و (4)، پارامترهای حل شده الگوریتم کریجینگ، مقادیر واریوگرام در آ و λ. برای مدل کروی، پارامترها به طور کلی مقادیر ثابتی هستند که به تجربه متخصص بستگی دارند و ذهنیت خاصی دارند. مطالعه ما از یک الگوریتم بهینهسازی ازدحام ذرات (PSO) برای بهینهسازی پارامترهای مدل استفاده میکند که میتواند بهترین تخمین پارامتر را منعکس کند. PSO توسط یک کار قبلی [ 53 ] پیشنهاد شد که رفتار ازدحام پرندگان را به شیوه ای تکراری شبیه سازی می کرد:
جایی که ωوزن اینرسی است، ج1و ج2عوامل یادگیری هستند و rآnدمنs اعداد تصادفی هستند که به طور یکنواخت بین [0،1] توزیع شده اند. این مطالعه از یک الگوریتم کریجینگ معمولی و مدل کروی برای درونیابی نقاط منطقهای استفاده میکند. الگوریتم PSO پارامترهای c و را بهینه می کند سی0که به عنوان بردار موقعیت یا سرعت ذرات <c طراحی شده اند، سی0, a> با حداکثر عدد تکراری منتیهrمترآایکس=1000و مقدار آستانه Vآلتوهتیساعتrهسساعتoلد=10-6. تابع تناسب اندام به صورت زیر تعریف می شود:
جایی که ز∗(پتیj)مقدار تخمینی است و ز(پتیj)ارزش واقعی است. برای مقادیر زیاد داده، زمان محاسبه PSO بسیار طولانی است. بنابراین، کار ما GPU را برای سرعت بخشیدن به سرعت همگرایی کل ازدحام و مبتنی بر محاسبه معماری یکپارچه دستگاه (CUDA) اتخاذ کرد. مدل محاسبات موازی در شکل 5 توضیح داده شده است .
CUDA یک مدل محاسبات موازی با داده های چندگانه تک دستورالعمل (SIMD) است. به عنوان یک پردازنده مشترک، GPU می تواند به CPU کمک کند تا کار محاسباتی بسیار موازی شده را از طریق ایجاد تعداد زیادی thread انجام دهد. همانطور که در شکل 5 توضیح داده شد ، CUDA یک معماری حافظه چندلایه شامل رشته ها، بلوک ها و شبکه ها را اتخاذ می کند. همه بلوک های یک شبکه عملکرد یکسانی را انجام می دهند و نیازی به برقراری ارتباط با یکدیگر ندارند. همه رشتههای موجود در یک بلوک میتوانند اشتراکگذاری ارتباطات داده را با اشتراک حافظه پیادهسازی کنند و هر رشته دارای یک ثبات خصوصی و حافظه محلی است. مراحل الگوریتم GPU-PSO-Kriging در الگوریتم 1 تعریف شده است.
| الگوریتم 1 مراحل الگوریتم GPU-PSO-Kriging |
ورودی : ω, c1, c2, منتیهrمترآایکس، Vآلتوهتیساعتrهسساعتoلد
خروجی : c سی0، یک
گام
-
سرعت ها و موقعیت های همه ذرات را به طور تصادفی در سمت CPU راه اندازی کنید. CUP اطلاعات ذرات را به GPU منتقل می کند.
-
هر ذره برای محاسبه سرعت و موقعیت با استفاده از معادلات (6) و (7) در GPU به صورت موازی.
-
مقدار تابع تناسب اندام را با فرمول (8) برای به روز رسانی محاسبه کنید پمن،ددر GPU به صورت موازی؛
-
در سمت CPU، به روز رسانی کنید پg،د، در صورت رسیدن منتیهrمترآایکسیا VآلتوهتیساعتrهسساعتoلدC بهینه شده را بدهید، سی0، a و الگوریتم به پایان رسید، در غیر این صورت به مرحله (2) بازگردید.
|
3.3. مدل سازی داده ها
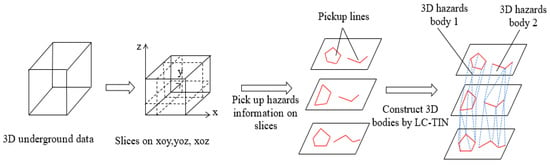
مدل سازی داده ها یک فرآیند مهم در 3DVF4UDR است. همانطور که در 3DVF4UDR در شکل 6 نشان داده شده است، داده های زمین شناسی درون یابی شده را می توان در هر صفحه سه بعدی برش داد و اطلاعات زمین شناسی را می توان با خطوط پیکاپ شناسایی کرد، که می تواند مناطق بسته یا غیر بسته را نشان دهد. پس از آن، خطوط پیکاپ با استفاده از الگوریتم پیشنهادی TIN با لایه محدود (LC-TIN) برای اجسام خطر زمینهای سه بعدی مختلف ساخته میشوند.
مفاهیم اساسی در جدول 1 تعریف شده است و الگوریتم LC-TIN را می توان در الگوریتم 2 توصیف کرد که فرآیند ساخت بدنه های خطر زمین را توصیف می کند. ما فرض می کنیم که نقاط داده به طور مساوی در هر لایه توزیع شده است. مشاهده شده است که با توجه به تعداد ثابت کل نقاط داده، زمان محاسبه LC-TIN با تعداد لایه ها کاهش می یابد. م، افزایش می یابد زیرا تعداد نقاط داده در هر لایه، v، کاهش می دهد. بنابراین، پیچیدگی است O(مv2)و م<vشایع ترین مورد است. برای نقاط داده توزیع نابرابر، زمان اجرا برای سازگاری با آن آزمایش شده است O(مv2)[ 49 ].
| الگوریتم 2 مراحل الگوریتم LC-TIN |
ورودی : ψ
خروجی : مراحل Ω
-
اگر Ψ≠نULL{
-
برای (b = 1; b<t; b++){
-
برای (c = 1; c< نب-1؛ c++){
-
برای (p = 1; p<u; p++) {
-
ساختن ηبج=<ℓپبج،ℓqبج+1>
-
انتخاب کنید ϑبجاز جانب ηبج
-
برای (i = 1; i< نηبج; i++) {
-
انتخاب کنید σηبجمناز جانب ϑبج
-
نقطه سوم را انتخاب کنید δϑ˜بجjاز جانب ϑ˜بجکه راضی می کند δϑ˜بجj=دقیقه{τ(δϑ˜بجj)|j=1،2،⋯،مترآایکس{نپبج،نqبج+1}}یا δϑ˜بجj=مترآایکس{جoس(δϑ˜بجj)|j=1،2،⋯مترآایکس{نپبج،نپبج+1}}
-
ساختن Τηبجمنتوسط δϑ˜بجjو به آن اضافه کنید Φبج
-
}//پایان برای (7)
-
}//پایان برای (4)
-
}//پایان برای (3)
-
اضافه کردن Φبجبه Φب
-
}//پایان برای (2)
-
کل ɸ را ایجاد می کند و کل را تشکیل می دهد Ω
-
}//پایان اگر
|
3.4. تحلیل داده ها
برای اجسام خطر زمین سه بعدی، 3DVF4UDR می تواند اطلاعات ویژگی آنها را تجزیه و تحلیل کند. این شامل محاسبه موقعیت فضایی اجسام خطر زمین، پیش بینی ها به هر صفحه مختصات دو بعدی و محاسبه حجم اجسام سه بعدی است. تجزیه و تحلیل داده ها می تواند اطلاعات لازم را برای درمان بلایا فراهم کند. ما از روش هندسی فضا برای تخمین حجم اجسام خطر زمین استفاده می کنیم و کل حجم توسط حجم های فرعی انباشته می شود. η. مراحل محاسبه حجم برای بدنه b امین خطر زمین در الگوریتم 3 توضیح داده شده است.
| الگوریتم 3 مراحل محاسبه یک بدنه زمین خطر |
مراحل
-
برای (p = 1; p<u; p++) {
-
برای (c = 1; c< نب-1؛ ج+) {
-
ساختن ηب=<ℓپبج،ℓqبج+1>و مربوط به آن Φبج={Τηبجمن|من∈{1،2،…نپبج+نqبج+1-2}}، با فرض سه نقطه از تیηبجمن هستند δتیηبجمن1، δتیηبجمن2و δتیηبجمن3.
-
دو نقطه را انتخاب کنید ℓپبجکه حداکثر فاصله را دارند (به نام Dمنسمترآایکس) به عنوان علامت گذاری شده است r1ℓپبجو r3ℓپبج. دایره ها را روی آن بکشید ςبا توجه r1ℓپبجو r3ℓپبجبه عنوان مراکز دایره و Dمنسمترآایکسبه عنوان شعاع دو دایره در دو نقطه متقاطع می شوند که به عنوان نامگذاری شده اند r2ℓپبجو r4ℓپبج. چهار گوش بسازید آرℓپبج={r1ℓپبج،r2ℓپبج،،r4ℓپبج}و آرℓپبج+1={r1ℓqبج+1،r2ℓqبج+1،r3ℓqبج+1،r4ℓqبج+1}که می تواند بیشتر نکات را پوشش دهد ℓپبج و ℓqبج+1به ترتیب.
-
تقسیم کنید آرℓپبجبه مثلث تیηبجپ1={r1ℓپبج،r2ℓپبج،r3ℓپبج}و تیηبجپ2={r3ℓپبج،r4ℓپبج،r1ℓپبج}. تقسیم کنید آرℓqبج+1 به مثلث تیηبجq1={r1ℓqبج+1،r2ℓqبج+1،r3ℓqبج+1} و تیηبجq2={r3ℓqبج+1،r4ℓqبج+1،r1ℓqبج+1}.
-
محاسبه کنید Dηبج1=∑ک=1نبج+نبج+1-2د(تیηبجک)، جایی که د(تیηبجک)مقدار مطلق حاصلضرب مخلوط در مورد بردارها است oδتیηبجک1→، oδتیηبجک2→و oδتیηبجک3→، جایی که oمبدأ مختصات است.
-
محاسبه کنید Dηبج2=د(تیηبجپ1)+د(تیηبجپ2)و Dηبج3=د(تیηبجq1)+د(تیηبجq2). در نهایت، حجم تقریبی چند وجهی فضایی را محاسبه کنید ηبج، به نام Vηبج=Dηبج1+Dηبج2+Dηبج3.
-
}//پایان برای (2)
-
}//پایان برای (1)
-
تمام جلدهای فرعی را جمع آوری کنید Vηبجبرای بدست آوردن حجم b امین جسم خطر زمین.
|
برای پرسنل تعمیر و نگهداری جاده، برآورد حجم و موقعیت خطرات زمین می تواند به آنها کمک کند تا اقدامات متقابل لازم را انجام دهند. چه زمانی دبلیو به اندازه کافی بزرگ است، برآورد می تواند وضعیت واقعی را منعکس کند. در بخش 3 ، معماری 3DVF4UDR را مورد بحث قرار دادهایم که مشخصات MVC را اتخاذ میکند و تمام فرآیندها در یک گردش کار ادغام میشوند. دادههای GPR بهعنوان فایلهای مختلفی که خودشان تعریف میشوند در مراحل مختلف گردش کار سازماندهی میشوند. برخی از الگوریتمهای جدید، که کل زنجیره تشخیص خطرات زمینی زیرزمینی را میسازند، به تفصیل شرح داده شدهاند. آنها الگوریتم GPU-PSO-Kriging (در بخش 3.2 )، الگوریتم LC-TIN (در بخش 3.3 ) و روش هندسی فضا (در بخش 3.4 ) هستند.
4. کاربرد 3DVF4UDR
4.1. محیط تجربی و داده ها
چارچوب پیشنهادی توسط معماری C++، OpenGL، CUDA و MFC پیادهسازی شد. سیستم عامل ویندوز 10 نسخه حرفه ای (64 بیتی)، محیط توسعه نرم افزار VS.NET 2019 و محیط سخت افزاری به شرح زیر بود. CPU از نوع Intel(R) Core(TM) i7-4800MQ CPU @ 2.70GHz با حافظه 16GB و کارت گرافیک NVIDIA Quadro K2100M بود. دادههای تجربی توسط ابزار GPR خود ساخته ما به دست آمد و اطلاعات جزئیات در جدول 2 توضیح داده شده است که در آن دوازده مجموعه از نمونهها ترسیم شده است. واحد مختصات متر است.
4.2. پیش پردازش داده ها
همانطور که در شکل 7 نشان داده شده است، هنگام برداشتن داده ها از هر خط نظرسنجی و نمایش آن در پنجره سمت چپ “DAT AND G3D”، داده های مربوطه در یک پنجره “نمای 2 بعدی” مشاهده می شوند. قبل از مدل سازی و تجزیه و تحلیل بیشتر، تمام داده های خط نظرسنجی باید از قبل پردازش شوند.
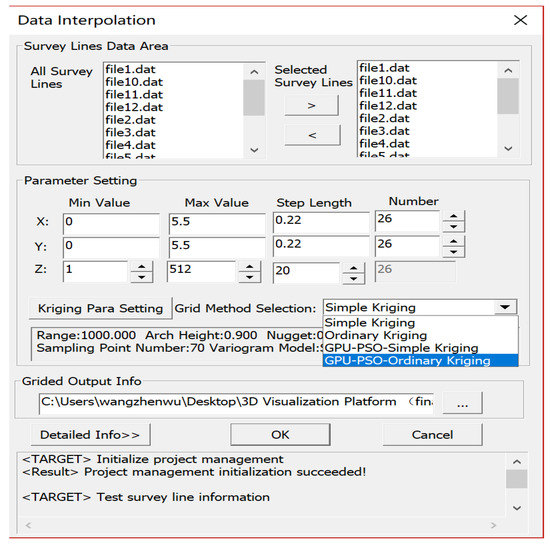
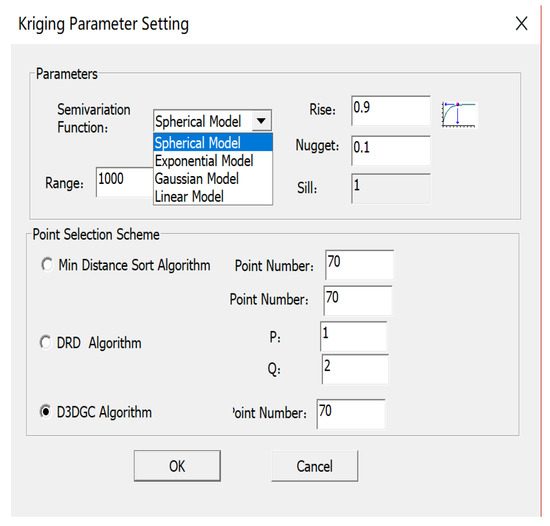
در شکل 8 ، تمام داده های خط بررسی جزئی (file1.dat~file12.dat) برای اجرای وظیفه درونیابی به کار گرفته شده است. محدوده مختصات ناحیه تشخیص در صورت نیاز تنظیم شده است. در این مثال، الف 5.5×5.5مساحت مربع با 26 لایه در جهت های X، Y و Z به طور جداگانه تنظیم شده است. این پلتفرم الگوریتمهای مختلف کریجینگ، مانند کریجینگ معمولی، GPU-PSO-Simple Kriging و GPU-PSO-Ordinary Kriging را پیکربندی میکند. شکل 9 نشان می دهد که چگونه می توان پارامترهای آنها را تنظیم کرد.
در داخل پلت فرم می توان روش های مختلف انتخاب نقطه نمونه برداری را انتخاب کرد و پارامترهای مربوطه را پیکربندی کرد. سه روش انتخاب ارائه شده است: «الگوریتم مرتبسازی حداقل فاصله»، «الگوریتم DRD» و «الگوریتم D3DGC». همه آنها دارای گزینه پارامتر “Point Number” هستند در حالی که “DRD Algorithm” همچنین دارای گزینه پارامتر “P” و “Q” است. برای خود الگوریتم کریجینگ، برخی از مدلهای متداول واریوگرام از جمله مدل کروی، مدل نمایی، مدل گاوسی و مدل خطی در پلتفرم ادغام شدهاند. این پلتفرم مقادیر اولیه پارامترهای کریجینگ را نیز تنظیم میکند، مانند قطعه، آستانه، دامنه و افزایش، اما اگر الگوریتم دومی انتخاب شود، اینها توسط PSO در الگوریتم GPU-PSO-Kriging بهینه میشوند (همانطور که در شکل 9 نشان داده شده است ) . پس از تولید .G3Dداده ها (به نام K_26_26_26 در شکل 10 )، داده ها را می توان برای لایه های مختلف در هر سطح مختصاتی، مانند XOY، YOZ و XOZ مرتب کرد. همچنین میتوان آن را بهطور کامل یا جزئی تجسم کرد و با کشیدن ماوس همانطور که در شکل 10 نشان داده شده است، در هر زاویهای نمایش داده شد .
4.3. مدل سازی داده ها
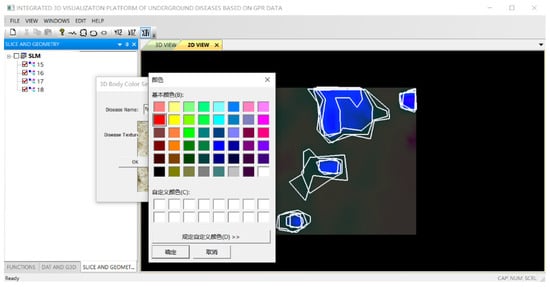
همانطور که در شکل 11 نشان داده شده است ، کاربران می توانند اطلاعات مربوط به خطرات زمین را از 26 لایه داده های G3D. چه به صورت جزئی یا کلی انتخاب کنند. لایههای حاوی اطلاعات خطرات زمین را میتوان بهعنوان برش انتخاب کرد و عملیات تعاملی میتواند این اطلاعات را در اشکال بسته یا بسته نشده دریافت کند. پس از انتخاب اطلاعات خطر زمین برای همه برشها، ویژگیهای بدنههای خطر زمین سه بعدی مختلف را میتوان پیکربندی کرد. اینها توسط خطوط پیکاپ در برش های مختلف از جمله نام بدنه، رنگ و بافت سازماندهی می شوند ( شکل 12 ).
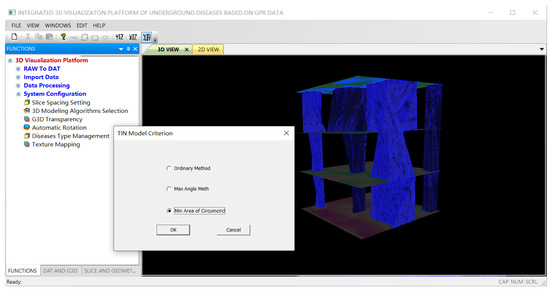
در پلت فرم پیشنهادی، معیارهای مختلف Delaunay از الگوریتم LC-TIN را می توان به منظور اجرای ساخت بدنه های خطر زمین سه بعدی، که در آن بدنه ها توسط خطوط پیکاپ از لایه ای به لایه دیگر مونتاژ می شوند، انتخاب کرد. همانطور که در شکل 13 نشان داده شده است، هنگامی که معیار مشترک Min Area of Circumcircle مشخص می شود، تصویری از بدنه های خطر زمین سه بعدی ساخته شده در پنجره اصلی نمایش داده می شود.
4.4. تحلیل داده ها
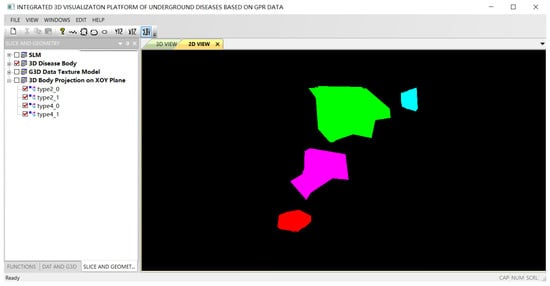
اجسام زمین خطر را می توان تجسم کرد و به سطوح مختلف نمایش داد. به عنوان مثال، در شکل 14 ، چهار جسم خطر زمین به صفحه XOY پیش بینی شده است ، که می تواند به کاربران کمک کند تا منطقه مورد استفاده را به طور تقریبی تخمین بزنند.
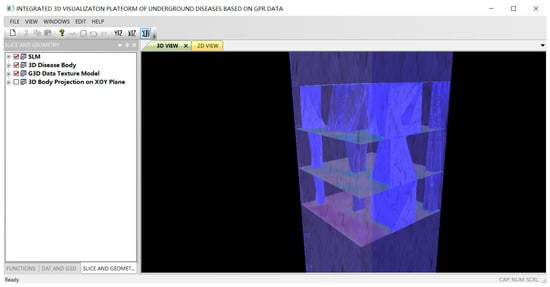
در شکل 15 ، حجم یا سطح اجسام سه بعدی را می توان با روش هندسی فضا که در بخش 3.4 ذکر شده است، محاسبه کرد . کاربران می توانند موقعیت ها و محدوده های خطر زمین را در مناطق تشخیص تایید کنند. علاوه بر این، بدنه های خطر زمین را می توان به طور کامل یا جزئی در صحنه های سه بعدی از طریق تجسم آن قسمت ها بین برش های مختلف همانطور که در شکل 16 نشان داده شده است، نمایش داد .
5. نتیجه گیری و کار آینده
در این کار، ما یک پلت فرم تجسم سه بعدی تعاملی برای تشخیص خطرات زمین در زیرزمینی در جاده های شهری ارائه کرده ایم. یک ابزار GPR که خود توسعه یافته است برای به دست آوردن داده های جاده های زیرزمینی استفاده شده است و 3DVF4UDR یک گردش کار برای یکپارچه سازی کل فرآیند تشخیص فراهم می کند. در مرحله پیش پردازش، دو الگوریتم انتخاب نقطه نمونه برداری در پلت فرم به کار گرفته شد تا داده های نمونه برداری با دقت بیشتری انتخاب شوند. به منظور دستیابی به دادههای زیرزمینی دقیقتر، از الگوریتم کریجینگ بهبودیافته برای درونیابی دادههای نمونهگیری استفاده شد که از الگوریتم PSO برای بهینهسازی پارامترهای کریجینگ استفاده میکند و از GPU برای افزایش سرعت همگرایی استفاده میکند. در مرحله مدلسازی، از الگوریتم LC-TIN برای اطمینان از اینکه اجسام زمینشناسی سهبعدی صافتر و دقیقتر نمایش داده میشوند، استفاده شده است.
برای کارهای آینده، چهار جنبه وجود دارد که می توان بیشتر مورد بررسی قرار داد. (1) 3DVF4UDR پیشنهادی حالت تعامل انسان-رایانه را برای تشخیص اطلاعات خطر زمین، که بر اساس دادههای GPR استاتیک است، اتخاذ میکند، زیرا افتراق خودکار کاراکتر خطر زمین بسیار دشوار است. به عنوان مثال، هم خطوط لوله و هم حفرههای خالی سوراخهایی در زمین هستند، اما تنها یکی از آنها یک خطر زمینشناسی است. تمایز بین آنها هنوز یک چالش است. کار آینده در این زمینه باید به دنبال تشخیص تغییرات زمانی و مکانی حفرههای خالی از طریق دادههای GPR پویا و فناوریهای موازی کامپیوتری ویسون باشد، با این فرض که خطرات زمین تغییر شکل میدهند اما خطوط لوله تغییر نمیکنند. (2) به منظور شناسایی اطلاعات تغییر، می توان یک پلت فرم ابری ایجاد کرد و برای ذخیره مقادیر زیادی از داده های GPR استفاده کرد. که برای پوشش تغییرات زمانی و مکانی در همان بخش جاده ضروری است. (3) الگوریتمهایی که اطلاعات تغییرات زمینشناسی را ترسیم میکنند، میتوانند عمیقتر مورد مطالعه قرار گیرند. روشهای پیشپردازش دادههای نوآورانه، همراه با فناوریهای مدلسازی و تحلیل مربوطه، میتوانند بیشتر مورد مطالعه قرار گیرند تا بتوانند به بهبود شناخت خطرات زمینهای زیرزمینی ادامه دهند. (4) قرار است مقایسه های عملی بیشتری برای اعتبارسنجی و بهبود بیشتر انجام شود. می تواند بیشتر مورد مطالعه قرار گیرد تا آنها بتوانند به بهبود شناخت مخاطرات زمینی زیرزمینی ادامه دهند. (4) قرار است مقایسه های عملی بیشتری برای اعتبارسنجی و بهبود بیشتر انجام شود. می تواند بیشتر مورد مطالعه قرار گیرد تا آنها بتوانند به بهبود شناخت مخاطرات زمینی زیرزمینی ادامه دهند. (4) قرار است مقایسه های عملی بیشتری برای اعتبارسنجی و بهبود بیشتر انجام شود.











بدون دیدگاه