

ELiT ، نرم افزار وب چند منظوره برای استخراج ویژگی از ابرهای نقطه سه بعدی LiDAR
خلاصه
تحقیق ما یک چرخه تحقیق و توسعه کامل را ارائه میکند – از تولید زمین شهری و استخراج ویژگی با پردازش دادههای خام LiDAR، از طریق تجسم تعداد زیادی از ویژگیهای شهری، و تا موارد استفاده موضوعی کاربردی بر اساس این ویژگیها استخراج و مدلسازی شده است. در مرحله اول، این مقاله بر سهم اصلی در راهحلهای الگوریتمی مربوط به استخراج کاملاً خودکار مدلهای ساختمانی با تولید زمین شهری متمرکز است.
مدلسازی توپوگرافی و استخراج ساختمانها، به عنوان دو مؤلفه کلیدی خط لوله الگوریتمی قوی، مورد بررسی قرار گرفتهاند. طرح معماری خانواده نرم افزارهای چند منظوره – EOS LIDAR Tool ( ELiT) با ویژگی های عملکردهای کلیدی آن و نمونه هایی از رابط کاربری ارائه شده است. هم نرم افزار دسکتاپ و هم نرم افزار وب سرور، و همچنین یک برنامه مبتنی بر ابر، ELiT Geoportal (EGP)، به عنوان موجودیتی برای خدمات مکانی آنلاین، بر اساس رویکرد ارائه شده توضیح داده شده است. تاکید بیشتر بر روی تجسم وب با کاشی های سه بعدی سزیوم، الگوریتم اصلی را برای تجسم ویژگی کارآمد در مکان های EGP نشان داده است. ارائه خلاصه دو مورد استفاده موضوعی، این تحقیق را نهایی کرده است و آن وظایف کاربردی را نشان می دهد که می توانند به طور موثر با گردش کار ارائه شده حل شوند. بر ضرورت توضیح جریان کار قطعی برای موارد استفاده، که بر اساس معناشناسی واقعی باشد، تاکید شده است.
1. مقدمه: راه اندازی مدل های سه بعدی شهر در مطالعات شهری از طریق پردازش داده های لیدار
1.1. مسائل رایج
جستجوی راه حل های نوآورانه در مطالعات شهری در درجه اول مستلزم اجرای رویکردها، فناوری ها و تکنیک های جدید به کار رفته در سیستم های اطلاعاتی و حوزه های سنجش از دور است. بنابراین، سنجش از دور شهری و پردازش دادههای مربوطه و مدلسازی برای مطالعات شهری، به سختی میتواند بیش از حد ارزش گذاری شود. نظارت و نقشهبرداری شهری جهانی کنونی با استفاده از ابزار رصد زمین، رویکرد غالبی است که تضمین میکند از کمبود دادههای مکانی قابل اعتماد در هر مقیاس و وضوح برای مناطق شهری با هر اندازه و مکان جلوگیری شود [1 ، 2 ، 3 ] .
امروزه مدلهای سه بعدی شهر در کاربردهای گستردهای در حوزههای موضوعی در جغرافیای انسانی و مطالعات شهری، و همچنین در علوم محیطی و معماری منظر [ 4 ، 5 ، 6 ] استفاده میشوند. علاوه بر علوم عمده ذکر شده، به راحتی می توان کاربرد مرتبط این مدل ها را در زمینه های کاربردی جغرافیای کالبدی، برنامه ریزی شهری، عمران، طراحی کشاورزی، جنگلداری، سیاست زیست محیطی، بوم شناسی، اقتصاد منطقه ای، جمعیت شناسی، جامعه شناسی و … نشان داد. دامنه های دیگر این موجودیتهای مدلسازیشده میتوانند عملکرد کلی را در حداکثر سی مورد استفاده نشان دهند که بیش از صد کاربرد را پوشش میدهد [ 7]]. ابزارهای نوآورانه Web-GIS که برای ایجاد مدلهای سه بعدی شهر و تجزیه و تحلیل توزیع مجموعههای فضایی آنها پس از آن در نظر گرفته شدهاند، میتوانند با این تکنیک در حوزههایی مانند مدیریت بلایا/فاجعه شهری، مراقبتهای بهداشتی، مخابرات، مدیریت تسهیلات، طبقهبندی فرآیندها در مناطق مختلف کمک کنند. ژئوسیستم های شهری سلسله مراتبی، و نظارت اجتماعی/انسانی/محیطی برای اجرای مفهوم شهر هوشمند [ 8 ، 9]]. به نظر ما، چنین رویکردی میتواند اساساً به ترسیم چارچوبهای هستیشناختی کافی کمک کند که اطلاعات شهری و دانش مربوطه را به دلیل ارائه مدل استاندارد شده محیط واقعی برای یک شهر معین در حوزههای مختلف آن ترکیب میکند، در حالی که، تکنیکهای تولید شده در اساس این رویکرد به ساخت مدلهای کارآمد شهری کمک میکند [ 10 ، 11 ].
یک مدل شهر سه بعدی دارای وضعیت پذیرفته شده عمومی به عنوان یک موجودیت جغرافیایی استانداردهای معین (مثلاً کنسرسیوم های فضایی باز) [ 1 ، 4 ، 5 ، 6 ، 8 ، 11 ، 12 ، 13 ، 14 ، 15 است.]. بنابراین، تنها می تواند نتیجه یک خط لوله پردازش سیستم اطلاعات جغرافیایی (GIS) باشد. یک GIS از لحاظ تاریخی رابطه نزدیکی با مطالعات شهری و همچنین با بسیاری از رشتههای موضوعی مرتبط دیگر داشته است، زیرا هر دو حوزه موضوعی تا حد معینی به عنوان روندهای کمی در جغرافیای عمومی پیادهسازی شدهاند. با این وجود، علیرغم مزایای قابل درک GIS در مطالعات شهری معاصر و افزایش سریع مداوم اطلاعات اجتماعی/محیطی مرتبط، نتایج به صورت دیجیتالی در بستههای نرمافزاری مختلف ذخیره میشوند که از انواع دادهها و قالبهای ناهمگن استفاده میکنند. این فرمت ها اغلب منحصراً بر اساس نیازهای محلی و نیازهای موقت یک پروژه معین تعریف می شوند. علاوه بر این، استفاده مکرر از این داده ها اغلب دقیقاً غیرممکن است، به دلیل کمبود اطلاعات در مورد روشی که در آن داده ها ذخیره می شوند، نمایش و ساختار آنها، کیفیت نهایی، تاریخی که اطلاعات به آن ارجاع می شود، مقیاس به کار رفته و چندین عامل دیگر. همه شرایط ذکر شده معمولاً منجر به ایجاد پایگاه های جغرافیایی جدا شده در مطالعات شهری می شود، البته اگر فقط رویه های استاندارد مربوطه درگیر نباشد. نمونه ای از این روش کلیدی می تواند معرفی استاندارد CityGML [16 ، 17 ، 18 ].
ما در بالا به اهمیت کلیدی سنجش از دور شهری (URS) به عنوان یک منبع اطلاعاتی برای تولید مدلهای سهبعدی دارای توپولوژی، هندسه و بافت ویژگیهای شهری اشاره کردیم. تکنیکهای URS میتوانند سکوهای فضایی، هوابرد و زمینی باشند که از ابزارهای چندطیفی و فراطیفی و همچنین راداری استفاده میکنند [ 19 ]. فناوری تشخیص و محدوده نور (LiDAR/lidar) تعدادی روش برای اندازهگیری محدوده یا فواصل به دلیل اختلاف زمانی بین ارسال/دریافت تکانههای لیزری است [ 3 ]. دادههای بهدستآمده با سنجش از دور لیدار بهعنوان ابرهای نقطهای سهبعدی، معمولاً متراکم و با دقت بالا هستند و مدتها قبل از این که این تکنیک به عنوان ارجحترین روش برای استخراج کارآمد ویژگیهای شهری بیان شود20 ، 21 ، 22 ، 23 ]. با افزایش شدید درخواستها برای مدلهای شهری سهبعدی بسیار دقیق و مدلهای ارتفاعی دیجیتال متناظر (DEMs) و به دلیل در دسترس بودن بزرگتر دادههای لایدار هوابرد (ALS) / زمینی (موبایل) (MLS) / لایدار هواپیمای بدون سرنشین (UAV-LS)، سه ویژگیهای شهری ابعادی، و ساختمانها، اول از همه، به برجستهترین موجودیتهای محیط شهری تبدیل شدهاند که با پردازش خط لوله لیدار مدلسازی شدهاند [ 3 ، 24 ، 25 ، 26 ، 27 ].
بدیهی است که مدل های سه بعدی شهر به عنوان نمایش حجم جامد سه بعدی از محیط شهری را می توان از منابع جایگزین به دست آورد [ 7 ]، اما دقیقاً داده های LiDAR با توجه به هزینه نسبتاً کم، جهانی بودن آشکار و دقت بالا به عنوان ارجح ترین آنها شناخته شده اند. 28 , 29 , 30 , 31 , 32 , 33 , 34 , 35 , 36 , 37 ].
ابرهای نقطه سه بعدی LiDAR که پس از بررسی های ارائه شده بر روی مناطق شهری انباشته شده اند، منشأ بکارگیری تکنیک استخراج خودکار ویژگی ها (AFE) هستند، زمانی که نقاط اجسام بازتابی مختلف از یکدیگر جدا می شوند، به عبارت دیگر فیلتر می شوند. دو دسته اصلی از نقاط پس از اعمال روش فیلتر کردن به عنوان کلاس زمینی و غیر زمینی به دست آمد، در حالی که دومی منبعی برای استخراج مدل ساختمان می شود [25 ، 28 ، 35 ، 38 ، 39 ، 40 ، 41 ، 42 ، 43 .]. نتیجه نهایی AFE را میتوان بهعنوان مجموعهای از مدلهای ساختمانی پذیرفت که با انتخاب رویکرد مدلسازی مناسب و روش ارائه آنها در انواع مدلهای شهر مجازی، میتوان آن را در چارچوبهای کلی مدلهای سهبعدی شهر قرار داد [44] . ، 45 ].
رویکردها و روشهایی که ویژگیهای شهری و ساختمانها را به هر روش جایگزین استخراج میکنند، بسیار مورد توجه هستند، زیرا برای کاربردهای مختلف مدلهای سه بعدی شهر بسیار امیدوارکننده است. محدوده کلیدی این برنامه ها می تواند به عنوان مثال شامل برنامه ریزی شهری، تخمین جمعیت، مدیریت بلایای شهری، بخش انرژی، برنامه ریزی شبکه های زیرساختی، طرح کلی پروژه های مختلف شهر هوشمند و راه حل هایی با مدل های شهر سه بعدی به دلیل تحلیل دید در محیط شهری باشد. . استخراج خودکار ویژگی از ابرهای نقطه ای جمع آوری شده بر روی مناطق شهری یک کار بسیار چالش برانگیز برای توسعه دهندگان، نقشه برداران و سایر محققان آن است، زیرا به معنای نقشه برداری خودکار سه بعدی با تولید صحنه سه بعدی مربوطه است که باید فضایی با بالاترین پیچیدگی را نشان دهد. چه بیشتر،3 ، 46 ، 47 ]. بنابراین، استخراج ساختمان و سایر ویژگیهای ساخت بشر از ابرهای نقطهای همراه با تولید مدل رقومی ارتفاع (DEM) یکی از چالشبرانگیزترین اهداف تحقیق و توسعه برای گسترش مطالعات شهری و همچنین حمایت از تصمیمگیری برای شهر است. محیط زیست با استفاده از دیجیتالی شدن و شبکه های اطلاعاتی.
ارائه مدلهای ساختمانها در چارچوب مدلهای سه بعدی شهر در زومهای مختلف یک صحنه سهبعدی، لزوم استفاده از ابزارهای تجسمسازی قدرتمند را نشان میدهد که باید برای مشخصات یک پلتفرم اطلاعات جغرافیایی وب امکانپذیر باشد و قابلیت پخش عظیم را داشته باشد. مجموعه داده های سه بعدی جغرافیایی، بر اساس فناوری WebGL. به نظر میرسد کاشیهای سهبعدی سزیوم ارجحترین پلتفرم سهبعدی Web-GIS است که یک کره مجازی را برای تجسم حجم عظیم دادههای دینامیکی جغرافیایی پیشنهاد میکند [ 17 ، 48 ، 49 ]. چندین راهحل منبع باز برای تبدیل مدلهای مختلف به کاشیهای سهبعدی ارائه شدهاند، که بهینهسازی قابلتوجهی را برای جریان نتایج مدلسازی شده و ارائه میدهد [ 50 ].
در چارچوب فعالیتهای تحقیق و توسعه نرمافزار خود، ما یک تعریف مشترک از سنجش از دور شهری با LiDAR را به عنوان فناوری میپذیریم که میتواند برای به دست آوردن دادههای اولیه برای پردازش بیشتر، و تولید اطلاعات مشتق شده در مورد سطح توپوگرافی، استفاده شود. کمربند پوشش گیاهی شهری، و ویژگیهای مختلف زیرساختهای انسانی (ساختمانها، پلها، جادهها، خطوط برق و غیره) در یک منطقه انتخابی مورد علاقه (AOI) [ 3 ، 9 ، 11 ، 19 ، 20 ، 21 ، 23 ، 26 ، 51]. چنین درکی از این فناوری می تواند با محدوده بلوک یا منطقه و همچنین با کل شهر مرتبط باشد. ما قبلاً در چندین مقاله منتشر شده برخی از ویژگیهای کلیدی رویکرد چند منظوره خود را برای پردازش دادههای لیدار هوابرد، زمینی، پهپاد با اهداف تولید کاملاً AFE و DEM ارائه کردهایم [8 ، 9 ، 52 ، 53 ، 54 ] .
1.2. استخراج خودکار مدل های ساختمانی و تولید DEM
به طور سنتی سنجش از دور شهری با تصاویر طیفی و ابرهای نقطه فتوگرامتری سروکار دارد. از زمانی که تقریباً سه دهه پیش دقت موقعیتیابی بالا برای سختافزار لیدار در دسترس قرار گرفت و به دلیل کاهش شدید این هزینه سختافزاری که در سال اخیر مشاهده شده است، تکنیک نقشهبرداری مربوطه به تدریج برای مدلسازی با توجه به ضرورتهای نظارت شهری ترجیح داده میشود [ 21 , 23 ، 25 ، 55 ].
مزایای قابل توجهی برای چنین راه حلی ممکن است با آن شرایط تعریف شود، که بر اساس آن حسگرهای LiDAR از پلتفرم های سخت افزاری مختلف می توانند مجموعه داده های نقطه ای را با دامنه های عظیمی از تراکم نقطه (مثلاً از چند تا چند هزار نقطه متفاوت) ارائه دهند. حتی با کمترین مقادیر این محدوده تراکم، ممکن است بتوان ویژگی های شهری، مرزهای دقیق آنها و ویژگی های توپوگرافی را استخراج کرد. آن مدل ها را می توان ایجاد کرد که به درستی نمای ساختمان و سازه های سقف را شبیه سازی می کند. تعدادی از تکنیک های مرتبط برای پردازش داده های لیدار بررسی شده با توجه به ضرورت های تولید توپوگرافی شهری و بازسازی ساختمان های سه بعدی توسعه یافته اند [ 56 , 57 , 58 , 59 , 60 ., 61 , 62 , 63 , 64 , 65 , 66 , 67 , 68 ].
در برخی از کارهای قبلی، ما قبلاً روشهای AFE موجود را بر اساس منبع داده اولیه طبقهبندی کردهایم [ 52 ، 53 ، 54 ]. راه اول مستلزم پردازش تصاویر با وضوح بالا در هوا به همراه DEM های تکمیلی در یک جریان کار الگوریتمی [ 11 ] است. اگرچه با چنین روشی نتایج قابل توجهی دریافت شده است، اما می توان منابعی را یافت که بر اساس آنها راه حل «تصاویر منحصراً هوایی» را می توان به عنوان راه حلی پذیرفت که همیشه در مناطق شهری با مسکن متراکم به اندازه کافی خوب عمل نمی کند. خطاهای انحرافی شناسایی شده عمدتاً ناشی از شکافهای منظره، سایهها و تضادها در پیکربندیهای مختلف شهری است [ 60 ،61 ]. بنابراین، رویههای AFE مبتنی بر رویکرد اول ممکن است به طور کامل در برنامههای کاربردی قوی مؤثر نباشند. راه دوم به طور مستقیم شامل دادهها و تکنیکهای لیدار میشود، و میتواند خروجی AFE قطعاً بهبود یافته را به دست آورد، اگر با روشهای فقط تصویر مقایسه شود [ 26 ، 51 ]. روشها و رویههای اعمال شده در روش سوم در یک مورد مشترک، هم تصاویر هوایی و هم انواع مختلف بررسیهای لیدار (ALS/MLS/UAV-LS) را به منظور استفاده از اطلاعات ترکیبی از همه منابع داده ترکیب میکنند [62 ، 63 ] .
یک ساختار دیگر از روشهای استخراج ویژگی خودکار را میتوان بر اساس تشخیص، تقسیمبندی و بازسازی پشت بام ساختمان ارائه کرد [ 58 ]. بنابراین، AFE مبتنی بر مدل برای سقفهای ساختمان، زمانی ارائه میشود که یک کاتالوگ از پیش تعریفشده از قالبهای سقف وجود داشته باشد [ 11 ، 46 ، 63 ] (به عنوان مثال، ممکن است کاتالوگ پشت بام CityGML [ 16 ] باشد )، یا برخی رسمیسازی شده باشد. شرح ویژگی هایی که باید استخراج شوند ارائه شده است، به عنوان مثال، تعیین شکل های پارامتری شده در یک فضای سه بعدی با روش های تبدیل 3 بعدی هاف [ 64 ]. راه حل جالب دیگری در پارادایم مدل محور در [ 65] اشاره شده است]، که در آن مدلهای سهبعدی سقفهای نمونه اولیه مبتنی بر قالبهای CityGML LOD2 هستند، چیزی که فرصتی برای اجرا از طریق ابرهای نقطه پراکنده فراهم کرده است [ 65 ].
رویههای AFE مبتنی بر داده اغلب به عنوان رویکردهای عمومی [ 30 ] نامگذاری میشوند، که اغلب به معنای استخراج ویژگی مستقیماً از مدلهای ارتفاع/سطح دیجیتالی دیجیتال (DEM/DSM) است [ 41 ، 65 ]. روش شناسی مبتنی بر داده نیز ممکن است به عنوان انواع روش های تعیین چند وجهی تعریف شود، زیرا مدل ویژگی تولید شده ممکن است از چند وجهی یا چند وجهی تشکیل شده باشد [ 40 ، 58 ، 66]]. از آنجایی که این متن یک مقاله مروری نیست، میتوان تنها با چند مرجع اضافی اشاره کرد که به نظر ما، فقط روشهای دادهمحور، و آنهایی که رویکردهای مدلمحور و دادهمحور را ترکیب میکنند، اکثریت راه حل های موثر در استخراج خودکار ویژگی از داده های بررسی شده LiDAR [ 58 ، 67 ، 68 ، 69 ].
این به طور مستقیم از مبانی اولیه سنجش از دور با لیدار [ 3 ، 19 ] سرچشمه می گیرد، همچنین این دیدگاه در مرجع جداگانه ای در مورد مزایای قطعی تولید DEM با نتایج Lidar به جای فتوگرامتری [70 ] ثابت شده است ، که تولید یک مدل دیجیتالی ارتفاع/سطح دیجیتال، بخشی جدا نشدنی از کل یک خط لوله AFE است، حتی اگر تکنیک فیلتر کردن به عنوان یک جزء غالب گردش کار مربوطه در نظر گرفته شود [ 71 ]. به نظر میرسد قابل درک است که در اکثر موارد یک لیدار DEM نه در مجموعهای از ویژگیهای شهری، بلکه در مجموعهای از آنهایی که کاملاً توپوگرافی هستند، ایجاد میشود [ 72] .]. با این وجود، در این مورد، سطح توپوگرافی مدلسازی شده میتواند به عنوان لایه اصلی صحنه برای ویژگیهای گسسته ساختهشده توسط انسان استخراجشده استفاده شود.
1.3. برخی از مسائل مشکل ساز ایجاد AFE و DEM
در حالی که قبلاً فلوچارت الگوریتمی اصلی تشخیص، استخراج و بازسازی ساختمان را در چارچوبهای مدلسازی چند وجهی بالا شبیهسازی ساختمان با پردازش دادههای ALS به صورت مختصر ارائه کردیم، تأکید کردیم که زمین ممکن است ویژگیهای اصلی خود را داشته باشد که زمین/غیر زمینی را رد کند. ویژگی متمایز بسته به مکان خاص و شرایط زمین داده شده [ 52 ، 54]. معمولاً ویژگیهای زیر اغلب الگوریتمهای فیلتر/طبقهبندی را رد میکنند: کمربند کم پوشش گیاهی. دیوارهای کم ارتفاع که در امتداد پیاده روها قرار دارند. پل ها؛ ساختمان های غیر استاندارد؛ لبه های بریده تپه؛ پوشش زمین مخلوط پیچیده، به ویژه توسط ویژگی های ساخته شده توسط انسان. نواحی همراه با زمین های کم ارتفاع و پر امداد. همه این ویژگی ها باعث عدم تخمین دقت قابل اعتماد در پردازش داده LiDAR برای AFE می شود. اگر استخراج ویژگی به طور پیشفرض متعلق به تکنیکهای تحقیقاتی «درشت» باشد و باید اول از همه، برای مجموعه دادههای جغرافیایی بزرگ اعمال شود [ 73]، الزامات نهایی شده برای خروجی داده مشتق باید زودتر بیش از اندازهگیری شود. معرفی الگوریتم طبقهبندی نسل دو شاخه DEM-AFE در متن ما علاوه بر اهداف دیگر، این هدف را دنبال میکند: برآوردن نیازهای افزایش یافته برای دقت خروجی الگوریتمی.
در حین نهایی کردن بررسی ادبیات، منطقی است که برخی از مسائل مشکلساز دیگری را که در تحقیق ما در گردش کار ایجاد AFE/DEM مطرح شدهاند، بررسی کنیم، اگر از طریق پردازش دادههای LiDAR انجام شود. جداسازی هنگام پردازش نقاط زمین از نقاط غیرزمینی عمدتاً به عنوان یک روش فیلترینگ نامیده می شود [ 74]]. تقریباً برای تمام خطوط لوله لیدار، تشخیص زمین و فیلتر کردن یک مرحله اجباری متحد برای تعیین اینکه کدام یک از برگردانده های LiDAR از سطح زمین برهنه هستند و کدام یک از سطوح غیرزمینی هستند که به طور قابل درک به ویژگی های گسسته تعلق دارند. بنابراین، سطح زمین را می توانیم به روشی مشابه به عنوان یک ویژگی پیوسته تعریف کنیم. تمایز زمین از غیرزمین معمولاً می تواند در مناطقی با تنوع توپوگرافی بالا کار دشواری باشد. علاوه بر این، لازم است در نظر گرفته شود که یک DEM قابل اعتماد تنها در صورتی میتواند ساخته شود که نقاط غیرزمینی قبل از ارائه درونیابی از طریق یک شبکه اولیه حذف شوند [ 71 ].
توپوگرافی شهری مبنای فیزیکی برای تخصیص ویژگی های مختلف شهری است. برگرفته از منابع زیر که فقط این حوزه موضوعی را برجسته می کند [ 56 , 70 , 75]، لازم به ذکر است که توپوگرافی سطح زمین دارای دو فرض کلیدی است که برای بازسازی آن بر اساس نقاط زمین ارائه شده در یک ابر نقطه سه بعدی LiDAR مفید است: (1) این سطح هم پیوسته و هم تکهای صاف است. در سراسر یک منطقه اسکن شده کامل و روی آن، با هر نقطه اش ژئو ارجاع داده شده است (X، Y – دو مختصات زمین مرجع مسطح، و مختصات عمودی Z، معمولاً با سطح | ارتفاع ویژگی مرتبط است). (2) هیچ نقطه اسکن شده دیگری در فاصله قابل توجهی از زیر سطح وجود ندارد، با وجود برخی نقاط نویز و نقاط پرت ناشی از آینه کاری از سطوح دیگر، چاه های عمودی، دیواره های سنگی و غیره. حتی اگر برخی از مناطق غیرعادی زمین (مانند عمودی و آنها به طور مداوم با سطح غالب و افقی تر متصل می شوند.
بر اساس چندین مرجع، ویژگی های کلیدی سطوح زمین صادر شده را می توان بر اساس خصوصیات عمومی سطوح توپوگرافی به چهار مجموعه طبقه بندی کرد [ 76 , 77 , 78]. هر چهار پارامتر کلیدی دقیقاً برای یک نسل زمین شهری، زمانی که ویژگیهای غیرزمینی به طور متراکم در همسایگی ارائه میشوند، اهمیت حیاتی دارند. بنابراین، یک پیشفرض کلیدی این است که نقاط زمین را از ویژگیهای شهری مجاور متمایز کنیم، و این فرض باید در آن بخش از یک گردش کار کامل AFE تکمیل شود، که کلاسهای نقطهای تجویز شده را فیلتر میکند. چهار پارامتر ذکر شده به شرح زیر است: (1) کمترین ارتفاعات مطلق (ارتفاع). (2) شیب سطح توپوگرافی؛ (3) اختلاف ارتفاع سطح زمین؛ و (4) همگنی سطح توپوگرافی. همه این ویژگی ها در چارچوب راه حل الگوریتمی دو شاخه ای ما پیشنهاد شده در این متن اعمال می شوند.
موضوع مشکل ساز نهایی مربوط به طیف گسترده ای از اندازه های ساختمان است که ممکن است برای برخی از فیلترهای به کار رفته در روش های طبقه بندی مشکلاتی ایجاد کند [ 76]]. فیلترهای توپوگرافی بر اساس الگوریتمهای پنجره در حال اجرا، گاهی اوقات موقعیتهای مشکلساز دارند که ویژگیهای سازنده بزرگ یا کوچک را حذف میکنند. این وضعیت ممکن است ظاهر شود، زیرا فیلترهای طبقهبندی نقاطی را که از تجزیه و تحلیل مقایسهای بین مقدار اندازهگیری شده و مقدار تخمین زده شده در یک محله مشخص مشخص میشوند، متمایز میکنند. اگر یک ساختار بزرگ به طور کامل در یک پنجره در حال اجرا قرار گیرد، نقاط ابری که در وسط یک ردپای مربوطه ظاهر می شوند ممکن است به عنوان بخشی از این ساختار در نظر گرفته نشوند، زیرا ممکن است تفاوت قابل توجهی بین دو نوع مقدار وجود نداشته باشد – اندازه گیری شده و تخمین زده شده ها
هدف اصلی این مقاله، تشریح سهم تحقیق در تولید مدلهای ساختمانی و کاربرد بیشتر آنها با ارائه چرخه کامل تحقیق و توسعه مربوطه – از پردازش ابری نقطه سه بعدی خام برای اهداف AFE، تا اجرای موارد استفاده موضوعی در پورتال وب اول از همه، تحقیقات ارائه شده مستلزم در نظر گرفتن تکنیک مدلسازی چند وجهی بالا برای AFE کاملاً خودکار با یک نسل DEM برای مناطق شهری است. بنابراین، دو مؤلفه کلیدی کل گردش کار با تأکید بیشتر بر برخی جنبههای تجسم وب ویژگی شهری و بررسی مختصر دو مورد استفاده موضوعی مورد بررسی قرار میگیرند. پلتفرمهای نرمافزار مبتنی بر وب و ابر اطلاعات جغرافیایی اصلی که برای اهداف ذکر شده توسعه یافتهاند در مقاله ما نیز توضیح داده شدهاند.

2. رویکرد و روش: توپوگرافی شهری و استخراج مدل ساختمان از ابرهای نقطه سه بعدی هوابرد LiDAR
2.1. مدلسازی چندوجهی بالا و راه حل الگوریتمی دو شاخه ای DEM Generation/AFE
ما قبلاً در انتشارات قبلی خود دو مورد از راه حل های AFE تا حدودی جایگزین خود را به عنوان مدل سازی چند وجهی بالا (HPM) ساختمان ها و چند وجهی پایین (LPM) ترسیم کرده ایم [ 52 ، 53 ، 54 ]. این دو تکنیک مدلسازی اجزای کلیدی جریان کار پردازش دادههای لیدار نویسندگان هستند، اما به طور کلی ممکن است دو جریان اصلی اساسی را در رویکردهای مختلف AFE موجود شناسایی کنند. اگرچه مورد این است که تکنیکهای استخراج ویژگی که قبلاً به کار رفته بودند، به عنوان یک قاعده، هدف قرار نمیگرفتند تا اساساً خود را مطابق با پیکربندیهای شهری موجود تنظیم کنند، در حالی که روشهای HPM ما به طور خلاصه در [52، 53] و روشهای LPM معرفیشده در [ 52 ، 53 ] ارائه شدند. 53 ،54 ] در جزئیات انجام شده در رویکرد تحقیق و توسعه چند منظوره منجر به توسعه نرم افزار وب مربوطه شد. چند کارکردی تکنیک AFE ما نه تنها به کاربرد آن در پیکربندیهای مختلف شهری (به عنوان مثال، ساختمانهای مرتفع در بخشهای مرکزی شهر، و ساختمانهای کممرتبه حومهها و مناطق روستایی) دلالت دارد، بلکه ابزارهای نرمافزاری کاربردی مختلف، آنچه که شرح داده شده است را نیز شامل میشود. زیر
متن معرفی شده در این فصل مقاله به راهحلهای مفهومی و الگوریتمی اصلی خود ما فقط در چارچوبهای مدلسازی چندوجهی بالا مربوط میشود. این امر مستلزم تولید مدلهای ساختمانی است که سطوح آن از تعداد زیادی چند وجهی تشکیل شده است و بنابراین نتایج مدلسازی شده مربوطه را میتوان به عنوان مدلهای سنگین پذیرفت. این بدان معناست که یک مدل HPM-building ممکن است از بیش از صد هزار نقطه تولید شود. زمانی که سعی کردیم ثابت کنیم که برای چارچوبهای HPM، روش طبقهبندی ابر نقطه غالب است، و مستقیماً با خوشهبندی مرتبط نیست، در حالی که برای عملیات LPM، تقسیمبندی ابر نقطه از طریق خوشهبندی کلیدی است [54] .]. مدلهای ساختمان LPM تولید شده میتوانند از جنبههای نه چندان زیادی تشکیل شوند، و تعداد نقاط تجویز شده برای یک نسل مدل تنها با تعداد تقریباً پنج هزار محدود است. تعداد معقولی ممکن است با تکنیک های نازک سازی تطبیقی به قیمت جزئیات بدست آید.
پس از اجرای الگوریتم اصلی فیلترینگ زمین/طبقه بندی نقطه، دو رویکرد الگوریتمی جایگزین در نظر گرفته شده، ارزیابی و به روز شده است، که عناصر به یک روش در منابع زیر ارائه شده اند [40 ، 56 ، 70 ، 75 ، 76 ، 77 . ، 78 ، 79 ، 80 ، 81]: (1) انتخاب شبکه نازک شده از نقاط زمین پیشین. مجموعه ای از بسته های نسبتاً بزرگ که می توانیم به راحتی حداقل یک نقطه زمین را انتخاب کنیم، در نظر گرفته شده است. (2) قطعات نقاط غیر زمینی باید از شبکه نقاطی که به طور متراکم واقع شده اند فیلتر شوند. رویکرد اول ممکن است به سختی نقاطی را که در اطراف لبه مشترک گستره فضایی داده ها قرار دارند به درستی طبقه بندی کند. این امر مستلزم آن است که هر چه بیشتر، مناطق همپوشانی بسته های طبقه بندی شده، که باید به طور مستقل پردازش شوند، بهتر است. اگر محدوده فضایی در یک منطقه بزرگ و بدون هیچ نقطه انتخاب شده باشد، ممکن است این قطعه بزرگ به اشتباه به عنوان زمین طبقه بندی شود. رویکرد دوم مستلزم تمایز بسیار دقیق قطعات زمین متصل از ویژگیهای غیرزمینی واقع در سطح توپوگرافی است. معمولاً به دلیل انتقال سطح صاف از زمین به ویژگی های غیرزمینی (در ورودی ساختمان، مجاورت سقف با توپوگرافی، خاکریزها، دیوارهایی که عمودی نیستند و غیره) ایجاد می شود. تمام ویژگی های توپوگرافی غیرعادی ذکر شده در بالا نیز باید در نظر گرفته شود.
اولین رویکرد الگوریتمی پس از تجزیه و تحلیل دقیق به عنوان روشی قابل اعتمادتر انتخاب شده است. نمای رسمی آن در رویکرد طبقه بندی ابر نقطه لیدار عمومی ما در نمودار جریان زیر ارائه شده است ( شکل 1 ). این نمودار جریان منعکس کننده راه حل الگوریتمی استخراج ویژگی خودکار تولید DEM شهری دو شاخه ای (DEM-G) است که از شاخه الگوریتمی غیرزمینی (فیلتر/طبقه بندی) (سمت چپ در شکل 1) تشکیل شده است .) و شاخه الگوریتمی Ground (DEM-G) (سمت راست). با توجه به مراحل بعدی در یک گردش کار فیلتر/طبقهبندی کلی، شاخه Ground باید ابتدا توضیح داده شود، علیرغم اینکه ما آن را در سمت راست قرار دادهایم، به عنوان مثال، ویژگی همبستگی TEXAS (استخراج و تقسیمبندی زمین) را در نظر میگیریم. گردش کار الگوریتمی [ 82 ].
2.2. شاخه الگوریتمی طبقه بندی زمین (DEM-G).
با توجه به فلوچارت الگوریتم اصلی ما که در شکل 1 نشان داده شده است، شرح گام به گام شاخه زمینی آن ممکن است با توجه به عدد نزولی بلوک های نمودار جریان مربوطه برای این شاخه مانند زیر باشد.
-
نقاط زمینی (بلوک 2.1 شاخه زمین – شکل 1 ):این شامل ورودی آن ابر نقطه LiDAR برای پردازش است که به طور پیش فرض حاوی برخی از نقاط زمین است.
-
فیلتراسیون اولیه نقاط (بلوک 2.2 شاخه زمین):الگوریتم های طبقه بندی زمین معمولاً برای تجزیه و تحلیل مکان متقابل نقطه مورد استفاده قرار می گیرند، بنابراین یا نیمه تصادفی یا همزمانی کامل آنها بر نتایج طبقه بندی تأثیر منفی می گذارد. بنابراین، نیمه تصادفی (یا تکراری) نقطه ممکن است یک آرایه نقطه را به شدت مخدوش کند، و یکی از دو نقطه تکرار شده باید به عنوان نقطه “نویز” علامت گذاری شود، در حالی که مجموعه ای از چنین نقاط – “دو” ممکن است با هم یک نقطه پرت را تشکیل دهند.
-
معرفی شبکه متراکم نقاط (بلوک 2.3):به طور پیش فرض باید در نظر گرفت که تمام نقاطی که روی سطح توپوگرافی قرار دارند، پایین تر از سایر نقاط مربوط به آن ویژگی ها هستند که توپوگرافی پایه آنهاست. بنابراین، لازم است برای طبقه بندی زمین فقط پایین ترین نقاط حفظ شود و این نقاط باید به قطعات نسبتاً کوچک زمینی محدود شوند. به طور معمول، حتی با کوچکترین تراکم نقطه لیدار (1-2 نقطه در هر متر مربع) باید پایین ترین نقطه را در یک بسته 2 متر × 2 متر و با استفاده از روش پنجره کشویی انتخاب کنیم.
-
به دلیل سازگاری (تراکم نقطه ای) فیلتر (بلوک 2.4):تمام نقاطی که تا به حال در هر دو شاخه الگوریتمی انتخاب شده اند (به شکل 1 a,b مراجعه کنید) متعلق به ویژگی های واکنشی صاف و غیر شفاف هستند (چه به زمین یا به سقف های ساختمان). آنها توزیع تقریباً یکنواختی از چگالی خود را در امتداد کل گستره داده دارند. این اجازه می دهد تا یک شبکه دو بعدی نامنظم مثلثی (TIN) در تمام این نقاط ایجاد شود. تمام آن لبههایی که بیش از حد طولانی هستند، یا دارای گامی مطابق با سطح نرمال تا توپوگرافی هستند، باید از این TIN حذف شوند. این روش آن دسته از بستههای توپوگرافی غیرعادی کوچک (سینکها و شکافهای توپوگرافی، چاههای شفت، قلههای کوچک تیز) را که صافی شبکه را با توجه به توزیع ارتفاع واحد شبکه میشکنند، تعیین و حذف میکند.
-
پذیرش نقاط زمین مقدم (مرجع) (بلوک 2.5):نقاطی که پس از تکمیل بلوک 2.4 باقی مانده اند به عنوان نقاط مرجع نامگذاری می شوند. این نقاط نباید سینک های تیز را در معرض دید قرار دهند، بنابراین هر یک از آنها باید یک گره شروع یک ساختار سطحی تازه صاف شده را آغاز کنند و این سطح می تواند به اندازه کافی بزرگ باشد. نقاط زمین مقدم را می توان به صورت پیش فرض به روش زیر انتخاب کرد. گستره داده های مشترک باید برای قطعات به اندازه کافی بزرگ تقسیم شود که نقاط زمین را در برگیرد، اما هر سطحی که بالای قطعه های همسایه (“یک تپه”) قرار گرفته و با شکاف های سطح مشخص شده است، باید به طور کامل شامل چنین قطعه ای باشد که “به اندازه کافی بزرگ است” . تمام بسته های همسایه ذکر شده برای نیمی از هر اندازه تغییر نسبتاً به دیگری قرار دارند. بنابراین، آنها برای نیمی از مساحت آن یکدیگر را قطع می کنند. مسئله کلیدی این است که نباید قطعاتی با لبه وسعت فضایی منطقه مشترک بر روی یک پارتیشن سطح کامل وجود داشته باشد. چنین بسته هایی باید نادیده گرفته شوند، زیرا به طور پیش فرض نمی توان حضور نقطه در این مناطق را گرفت. به طور معمول، پایین ترین نقطه باید در تمام بسته های نقطه به دست آمده در مراحل الگوریتمی قبلی انتخاب شود. این نقطه پس از حذف 0.3 درصد از نقاط پایین تر که به عنوان نویز/نوسانات تصادفی در نظر گرفته شده اند انتخاب می شود. اندازه قطعه 30 تا 50 متر در امتداد هر لبه آن اجازه می دهد تا حتی یک منطقه توپوگرافی به شدت متقاطع را به طور موثر طبقه بندی کنید، به شرطی که هیچ ساختمان بزرگی در آن وجود نداشته باشد. در صورت وجود ساختمان های بزرگ (تقریباً با اندازه سقف 50 متر × 50 متر و بیشتر)، اندازه بسته باید تا اندازه بزرگترین ساختمان بزرگ شود تا از تضاد فضایی آشکار جلوگیری شود. ما باید در نظر بگیریم که آن دسته از قطعاتی که یا دارای زمین شکسته یا حتی با سطوح توپوگرافی متقاطع هستند و همچنین آنهایی که ساختمانهای موجود و با مساحت کمی دارند، ممکن است به عنوان نقاط زمین طبقه بندی نشوند. طول کل هر لبه وسعت کل داده برای هر طرف یک بسته به عنوان نتیجه تقسیم بندی باید حداقل سه برابر از طول ضلع این بسته، جایی که نقاط زمین پیشین قرار دارند، بیشتر باشد. در غیر این صورت، نقاط انتخاب شده ممکن است فقط در یک منطقه کوچک بومی سازی شوند، و این منطقه نمی تواند پایه ای برای کل ساخت توپوگرافی محلی باشد، در حالی که این نقاط نمی توانند نقاط مرجع باشند. که یا با زمین شکسته یا حتی با سطح توپوگرافی متقاطع و همچنین آنهایی که ساختمانهای موجود و با مساحت کوچک دارند، ممکن است به عنوان نقاط زمین طبقه بندی نشوند. طول کل هر لبه وسعت کل داده برای هر طرف یک بسته به عنوان نتیجه پارتیشن بندی باید حداقل سه برابر از طول ضلع این بسته، جایی که نقاط زمین قبلی قرار دارند، بیشتر باشد. در غیر این صورت، نقاط انتخاب شده ممکن است فقط در یک منطقه کوچک بومی سازی شوند، و این منطقه نمی تواند پایه ای برای ساخت توپوگرافی محلی کامل باشد، در حالی که این نقاط نمی توانند نقاط مرجع باشند. که یا با زمین شکسته یا حتی با سطح توپوگرافی متقاطع و همچنین آنهایی که ساختمانهای موجود و با مساحت کوچک دارند، ممکن است به عنوان نقاط زمین طبقه بندی نشوند. طول کل هر لبه وسعت کل داده برای هر طرف یک بسته به عنوان نتیجه پارتیشن بندی باید حداقل سه برابر از طول ضلع این بسته، جایی که نقاط زمین قبلی قرار دارند، بیشتر باشد. در غیر این صورت، نقاط انتخاب شده ممکن است فقط در یک منطقه کوچک بومی سازی شوند، و این منطقه نمی تواند پایه ای برای ساخت توپوگرافی محلی کامل باشد، در حالی که این نقاط نمی توانند نقاط مرجع باشند. طول کل هر لبه وسعت کل داده برای هر طرف یک بسته به عنوان نتیجه پارتیشن بندی باید حداقل سه برابر از طول ضلع این بسته، جایی که نقاط زمین قبلی قرار دارند، بیشتر باشد. در غیر این صورت، نقاط انتخاب شده ممکن است فقط در یک منطقه کوچک بومی سازی شوند، و این منطقه نمی تواند پایه ای برای ساخت توپوگرافی محلی کامل باشد، در حالی که این نقاط نمی توانند نقاط مرجع باشند. طول کل هر لبه وسعت کل داده برای هر طرف یک بسته به عنوان نتیجه پارتیشن بندی باید حداقل سه برابر از طول ضلع این بسته، جایی که نقاط زمین قبلی قرار دارند، بیشتر باشد. در غیر این صورت، نقاط انتخاب شده ممکن است فقط در یک منطقه کوچک بومی سازی شوند، و این منطقه نمی تواند پایه ای برای ساخت توپوگرافی محلی کامل باشد، در حالی که این نقاط نمی توانند نقاط مرجع باشند.بلوک الگوریتمی بعدی (بلوک 2.6) تنها بلوک است که برای “دو بلوک فرعی” منشعب می شود.
-
تعریف گام به گام دقیق قاب اسکلت زمینی (بلوک 2.6.1، بلوک فرعی سمت راست بلوک ششم – شکل 1 ):بنابراین، یک TIN از طریق نقاط مرجع ساخته میشود و جنبههای آن شیب توپوگرافی را در برخی از قطعات محلی مشخص میکند. برای هر نقطه انتخاب شده بر روی بلوک الگوریتمی سوم، نزدیکترین وجه باید پیدا شود، در حالی که z– مختصات این جنبه در نظر گرفته نمی شود. فاصله-ارتفاع بین نقطه و وجه و همچنین ارتفاع این نقطه از بالاترین نقطه این وجه باید اندازه گیری شود. اگر نقطه زیر وجه باشد، این فاصله-ارتفاع منفی است. ارتفاع بالاترین نقطه که متعلق به این وجه است نیز اندازه گیری می شود. پایین ترین نقطه در بین همه آنهایی که متعلق به این جنبه هستند انتخاب می شود. تمام نقاط انتخاب شده که به نقاط مرجع تبدیل می شوند، نباید بیش از مقدار معینی بالاتر از سطح وجه باشند و نسبت به مقدار معینی نباید از وجه فاصله بیشتری داشته باشند. در این روشهای اندازهگیری، هم فاصله نقطه تا سطح و هم ارتفاع آن از سطح وجه باید با ضریب وزنی برابر 0.5 پذیرفته شود. چنین پذیرشی اجازه می دهد تا شیب های شدید سطح مرجع به دست آمده از نقاط مرجع (به بلوک 2.5 مراجعه کنید)، که در آن این شیب ها در امتداد لبه های این سطح ظاهر می شوند، اجازه می دهد. نقاط انتخاب شده در نتیجه به TIN مرجع اضافه می شوند و تکرار بعدی تا آن زمان تکمیل می شود، زمانی که تمام نقاط با موفقیت جمع آوری می شوند. تعداد کل تکرارها نباید از مقدار آستانه تعریف شده تجاوز کند. نقاطی که خیلی نزدیک به نقاطی هستند که قبلاً اضافه شده اند باید نادیده گرفته شوند. بنابراین، ما می توانیم از شکست های توپوگرافی در یک TIN تقریبی جلوگیری کنیم. به این ترتیب، سطح زمین ساخته شده از طریق تقریباً پایین ترین نقاط زمین، با پایین ترین نقاطی که به تازگی اضافه شده اند، گام به گام با دقت بیشتری تعریف می شود، در حالی که روش تقریبی را می توان از طریق ارتفاعات توپوگرافی صاف تکمیل کرد.
-
تعریف دقیق قاب اسکلت زمینی توسط شبکه نقاط با موقعیت متراکم تر (بلوک 2.6.2، بلوک فرعی سمت چپ بلوک 2.6):پارامترهای زیر برای بلوکهای الگوریتمی طبقهبندی «زمین 2.2–2.6» باید برای پردازش متناظر در گفتگوی کتابخانه ماکرو مربوطه (MLD) با پیادهسازی بیشتر در برنامه دسکتاپ ELiT Core وارد شوند— شکل 2 .پس از اینکه اسکلت توپوگرافی تکمیل شده سطح زمین به صورت پیوسته بر روی شبکه نقطه ای با چگالی کم ساخته شد، می توان با استفاده از همان روش پنجره کشویی 0.5 × 0.5 متر، این قاب را متراکم تر کرد. برای متراکم کردن شبکه همان الگوریتمی که در بلوک الگوریتمی سوم اعمال شده است، در صورتی که مقدار چگالی نقطه برای ارائه این روش قابل قبول باشد، یک بار دیگر به کار گرفته می شود. از آنجایی که اندازه پذیرفته شده ما از پنجره کشویی به عنوان 2 متر × 2 متر شامل 16 سلول 0.5 × 0.5 متر است، تعداد کل تکرارهای الگوریتمی در این مورد خیلی بزرگ نیست.
-
صاف کردن شبکه “متراکم” (بلوک 2.7):علیرغم انتظارات مبنی بر اینکه اسکلت-قاب توپوگرافی پیوسته ممکن است با دقت و دقت ساخته شود، ممکن است شامل برخی از انحرافات توپوگرافی غیرعادی باشد (که معمولاً از ارتفاع کمتر از حد لازم است) زیرا ممکن است در فیلتر فیلتر نشوند. بلوک چهارم یک روش هموارسازی شبکه “متراکم” برای آن قاب اسکلت توپوگرافی، که قبلاً به عنوان یک شبکه فشرده (“بسیار متراکم”) به دست آمده است، اجازه می دهد تا این انحرافات را به همان شیوه ای حذف کنید، همانطور که در بلوک 2.3 انجام شده است.
-
تقویت شبکه هموار (بلوک 2.8 از شاخه زمین – شکل 1 ):پس از اینکه شبکه صاف شده با اسکلت-قاب توپوگرافی مربوطه به دست آمد، این قاب باید با نقاط مجاور افزایش یابد. این نقاط هر دو آنهایی هستند که از شبکه پایین ترین نقاط آن سلول پنجره کشویی 0.5 متر × 0.5 متر ذکر شده است، و همه نقاط دیگر که در فراتر از این لبه پنجره قرار دارند، اگر چگالی آنها رضایت بخش باشد.با این وجود، قبل از بهبود فوری یک شبکه بهدستآمده، ممکن است لازم باشد یا از طریق قاب توپوگرافی که در بالا ذکر شد، یک شبکه درونیابی دیگری ایجاد شود، یا دقیقاً این TIN مستقیم قاب اسکلت را برای طبقهبندی سایر ویژگیها اعمال کرد، اگر این طبقهبندی به مقداری نیاز دارد. اطلاعات اضافی ممکن است زمانی باشد که طبقه بندی دقیق نیاز به دانشی در مورد تخصیص ویژگی در رابطه با سطح زمین داشته باشد. اگر ارائه نشود، پردازش بیشتر ممکن است دشوار به نظر برسد.
-
فیلتر کردن نقاط «پایینتر از زمین» (بلوک 2.9):به طور پیش فرض، تمام نقاطی که پایین تر از نقاط طبقه بندی شده به عنوان “زمین” هستند، باید به عنوان “صدای کمتر” تعریف شوند (سینک های توپوگرافی، چاه های شفت، سایر آینه های منفی سنجش لیزری).پارامترهای ورودی سفارشیشده برای بلوکهای الگوریتمی طبقهبندیکننده «زمین 2.7-2.9» باید برای پردازش متناظر در MLD مربوطه در نرمافزار ELiTCore تنظیم و وارد شوند ، درست همانطور که برای بلوکهای 2.2-2.6 انجام شده است ( شکل 2 ).
-
حذف درختان و درختچه های کوچک از زمین (بلوک 2.10):این یکی قبل از آخرین بلوک الگوریتمی شاخه Ground سرانجام سطح توپوگرافی مدل شده از طریق بلوک های 1-9 را اصلاح می کند. بنابراین، نتایج مشتق بعدی به طور قطعی در آخرین بلوک این برانچ الگوریتمی به دست می آید.
-
شبکه صاف، تقویت شده و تصفیه شده به عنوان یک DEM (بلوک 2.11):به این ترتیب یک “DEM شهری” (زمین شهری) ایجاد می شود، که ما آن را مترادف یک مدل زمین دیجیتال می دانیم، که نشان دهنده زمین برهنه با مقادیر z یکنواخت در هر “منطقه شهری” است.
2.3. استخراج ساختمان (BE) شاخه الگوریتمی طبقه بندی
شاخه غیرزمینی، شاخه سمت چپ یک فلوچارت الگوریتمی دو شاخه ای ( شکل 1)) را می توان به عنوان شاخه طبقه بندی استخراج ساختمان (BE) به دلیل موضوع محتوای الگوریتمی آن نیز تعریف کرد. الگوریتم دو شاخه ای ارائه شده جزئیات کلیدی طبقه بندی ابر نقطه ای را به عنوان پایه اساسی مدل سازی چند وجهی ساختمان ها نشان می دهد. هر دو شاخه، پایه و غیرزمین، به یک جریان کار الگوریتمی منطقاً متحد تعلق دارند و در متن منحصراً برای درک بهتر توسط خواننده از هم جدا شده اند. این گردش کار واحد فرصتی را برای ارائه مجموعه داده های ترکیبی از مدل های ساختمانی که در یک DEM در مقیاس های مختلف به عنوان یک نتیجه پردازش شده نهایی به دست آمده در حالت کاملاً خودکار به دست می آید، فراهم می کند، در حالی که طبق منابع معروف، آن مدل های CityGML که هم شامل زمین و هم ساختمان هستند، می توانند به سختی بیش از حد ارزش گذاری شود [ 83 ].
به طور کلی، چندین رویکرد طبقه بندی قوی وجود دارد. فقط برای مثال، یک رویکرد ساده ممکن است مانند زیر باشد. ما در بخش فرعی قبلی بر اهمیت انتخاب یک روش پیشپردازش مناسب برای دادههای خام LiDAR، در حین بدست آوردن یک شبکه، تأکید کردیم. اگر این سطح شبکه راضی باشد، روش الگوریتمی بعدی ممکن است مربوط به حذف نقاطی از ارتفاعات زیر یک مقدار معین (احتمالاً 2-3 متر) باشد. به طور معمول، قله های زمین، برخی زیرساخت های انسانی و سایر ویژگی ها (پل ها، جاده ها و وسایل نقلیه)، پوشش گیاهی کم کمربند (بوته ها، بوته ها و غیره) است. بنابراین، تمام این نقاط از مجموعه داده LiDAR حذف می شوند، در حالی که آن نقاطی که ترک کرده اند و عمدتاً شامل ساختمان ها و کمربند پوشش گیاهی بالا هستند برای پردازش بیشتر نگهداری می شوند.
با توجه به تجربه پردازش خودمان، میتوانیم بگوییم که ممکن است دو نوع اشتباه در روشهای طبقهبندی ابر نقطه وجود داشته باشد: (1) یک ویژگی به کلاسی که باید متعلق به آن باشد طبقهبندی نمیشود. در مورد طبقهبندی ساختمانها با مدلسازی چند وجهی بالا، ممکن است ناشی از داشتن سقف برخی ساختمانها باشد که ممکن است مجموعهای از سطوح صاف نباشد. به عنوان مثال، ممکن است برخی از برجها بر روی بامها یا نقش برجسته تزئین شده آنها (مثلاً معماری گوتیک) وجود داشته باشد. (2) ویژگی های کلاس دیگر به اشتباه به عنوان ویژگی های کلاس مشخص طبقه بندی می شوند. پس از طبقهبندی ساختمان، ویژگیهای بالا با سقفهای هموار و سایر سطوح هموار، که وجوه آنها به اندازه کافی بزرگ است، میتواند اشتباهات طبقهبندی را دقیقاً از این نوع دوم ایجاد کند. ویژگی های واقعی ممکن است به اشتباه به عنوان ساختمان طبقه بندی شوند، اما آنها واقعاً ممکن است کامیون های بزرگی باشند، یک بخش جنگلی با شکل هندسی صاف و با شاخ و برگ های متراکم که اجازه عبور اسکن لیدار را نمی دهد. موارد مشابه دیگر نیز امکان پذیر است. تقریباً تمام اشتباهات ذکر شده را می توان با اعمال برخی معیارهای بهبود تکمیلی طبقه بندی اعمال شده اصلاح کرد. این معیارها باید بیشتر توضیح داده شوند، و بدون این پارامترها، کل گردش کار طبقه بندی که در زیر توضیح داده شده است، فقط مقدماتی است.
در این متن، الگوریتم طبقهبندی ارائه شده را برای نقاطی که متعلق به سقفهای ساختمان هستند، اعمال میکنیم. بنابراین، این نسخه اصلاح شده مستقیم الگوریتم استخراج ویژگی اصلی ما است [ 52 ، 53 ، 54 ]. بلوک های الگوریتمی ارائه شده در شاخه شرح داده شده در زیر در شکل 1 در بالا نشان داده شده است. طبقه بندی ساختمان از طبقه بندی اصلی پیروی می کند. بنابراین، به طور قابل درک مبتنی بر آن نقاطی است که بالای سطح زمین هستند. میتوانیم بهعنوان الگوی سطح زمین توپوگرافی، سطحی از سطح TIN را که بر روی چارچوب اسکلت زمین مرجع ساخته شده است، یا سطحی از سطح ساخته شده بر روی یک شبکه درونیابی را بپذیریم.
با توجه به فلوچارت الگوریتم دو شاخه ای نشان داده شده در شکل 1 ، شرح گام به گام شاخه غیرزمینی آن (نخستین، چپ، برانچ الگوریتمی) ممکن است با توجه به یک عدد نزولی جریان مانند زیر باشد. نمودار بلوک های مربوط به این شاخه:
-
نقاط غیرزمینی (دو کمربند پوشش گیاهی، ساختمانها، سایر ویژگیهای زیرساختی) (بلوک 1.1 شاخه غیرزمینی – شکل 1 ):این شامل ورودی آن ابر نقطه لیدار برای پردازش است که به طور پیشفرض حاوی حداقل برخی از نقاط غیرزمینی است.
-
طبقه بندی سقف های ساختمان جداگانه، درختان و خطوط برق: طبقه بندی سقف های ساختمان (بلوک 1.2 شعبه غیر زمینی):
-
حذف نقاطی که هم پایین هستند و هم به اندازه کافی از سطح زمین بلند نیستند (بلوک 1.3):قابل درک است که اولین گام برای حذف نقاط “غیر طبیعی” گامی برای حذف نقاطی است که کمتر از مقدار آستانه ارتفاع هستند. ارتفاع توپوگرافی 1.5-2 متر را نمی توان به عنوان یک مقدار آستانه قابل اعتماد پذیرفت که سقف ساختمان را نشان می دهد. این نکات باید حذف شوند.
-
حذف نقاط پرت مانند قطعات کوچک (بلوک 1.4) و فیلتر اولیه از موارد زیر:مجموعهای از نقاط جدا شده از نظر فضایی (“نقاط پرت”) که دارای مناطق نسبتاً کوچکی هستند (مثلاً تا 15 متر مربع ) نیز باید حذف شوند، زیرا آنها اجازه نمیدهند به طور قطع یک ساختمان را در مقایسه با یک کامیون بزرگ شناسایی کنیم.در این نقطه از شاخه غیرزمینی، برخی از پارامترهای ورودی سفارشیشده برای بلوکهای الگوریتمی طبقهبندی «1.2-1.4 غیرزمینی» باید تنظیم شوند و برای پردازش در MLD مربوطه وارد شوند، همانطور که برای بلوکهای 2.2-2.6 نشان داده شده است. بالا ( شکل 2 ).
-
معرفی شبکه نقطه متراکم (بلوک 1.5):در اکثر موارد سطح سقف شفاف نیست. بنابراین، بیشتر سقفهای ساختمانهای کممرتبه ممکن است به پایینترین نقاط در بین تمام نقاط غیرزمینی که در داخل یک قطعه کوچک انتخاب شده در یک ابر نقطهای مشخص شدهاند، تعلق داشته باشند، در حالی که سقفهای ساختمانهای بلند ممکن است به بالاترین نقاط غیرزمینی تعلق داشته باشند. نکته ها. سقف هایی که برای تیر LiDAR خیلی شفاف هستند ممکن است اصلاً پیدا نشوند. انتخاب هر پایین ترین نقطه برای یک بسته معین با استفاده از روش پنجره کشویی (یک سلول) 0.5 متر × 0.5 متر، کل جریان کار الگوریتمی را توسط این بلوک با دقت لازم فراهم می کند. پردازش را تسریع میکند، تعداد بیش از حد نقاط را حذف میکند، و مجموعه نقاط را یکنواختتر میکند. اگر یک شبکه نقطه ای به اندازه کافی متراکم نباشد، ماتریس پنجره کشویی ممکن است تا 1 متر × 1 متر افزایش یابد. یا حتی به اندازه 2 متر × 2 متر. متأسفانه، قابلیت اطمینان نتیجه خروجی در چنین حالتی به شدت کاهش می یابد. به نظر می رسد برای اعمال اندازه سلولی حتی بزرگتر از 2 متر × 2 متر کاملاً بی فایده است.
-
فیلتر کردن اولیه به دلیل آستانه ارتفاع (بلوک 1.6):سادهترین راه برای حذف قسمت اصلی آن نقاط پرت توپوگرافی شدید، وارد کردن آستانههای ارتفاعی معین است: انتخاب یک پایینترین نقطه از طریق شبکه با سلولهایی با لبههای دوبرابر طولانیتر از شبکه اولیه. یعنی از طریق توری که دو بار نازک شده در مقایسه با تور اولیه. به این ترتیب، پایین ترین نقطه یکی از چهار مورد دیگر است که متعلق به این سلول انتخاب شده است. یک TIN از طریق این شبکه نقطه نازک ساخته می شود. آن نقاط از یک شبکه اولیه به TIN به دست آمده اضافه می شوند، که از نظر توپوگرافی نزدیک به آن سطح مشتق هستند که از طریق این TIN به دست آمده ساخته می شود.
-
فیلتر کردن اولیه با توجه به مقادیر خالص نقطه ای هموارسازی (بلوک 1.7 از شاخه غیر زمینی – شکل 1 ):یک TIN باید بر اساس نقاط انتخاب شده در بلوک های الگوریتمی قبلی ساخته شود. تمام آن لبههای مثلثی که بیش از 1.5 متر در صفحه X، Y و بیش از 4 متر در فضای سهبعدی هستند، باید از این TIN حذف شوند. پس از حذف لبه، تعداد وجوه TIN به طور قابل توجهی کاهش می یابد. برای هر یک از وجوه (یک وجه “هسته”) باقی مانده، زوایایی که هر یک از آنها با وجوه همسایه ایجاد می کنند، باید در نظر گرفته شود. به طور معمول تعداد وجوه مجاور از 0 به 3 تغییر می کند. اگر بیش از نیمی از زوایای مشتق به طور قابل توجهی از 0 یا 180 درجه متفاوت است، این وجه “هسته” باید حذف شود. فرآیند تعاملی حذف وجه برای قابلیت اطمینان رضایت بخش نتایج خروجی باید سه بار تکرار شود. بسته های به هم پیوسته، که شامل کمتر از دو وجه و با مساحت نه کمتر،2 )، از محتوای TIN که پس از حذف لبه باقی مانده است، انتخاب می شوند. در پردازش در این بلوک الگوریتمی، زاویه پذیرفته شده بین دو وجه در محدوده ای از 20- تا 20+ درجه و از 160 تا 200 درجه باقی می ماند، یا مقدار منفی یک زاویه را در نظر بگیریم یا خیر. بسته های محدود شده با تعداد وجه های کمتر از پنج باید حذف شوند.در این نقطه از شاخه غیرزمینی، برخی از پارامترهای ورودی سفارشیشده برای بلوکهای الگوریتمی طبقهبندیکننده «1.5-1.7 غیرزمینی» باید به دلیل پردازش در MLD مربوطه، همانطور که قبلاً برای بلوکهای 2.2-2.6 نشان داده شد، برای ورودی تنظیم شوند. شکل 2 ).
-
فیلتر ثانویه با توجه به مقادیر خالص نقطه ای هموارسازی (بلوک 1.8):الزامات مربوط به مقدار زاویه بین دو وجه را می توان پس از فیلتر اولیه از تمام شکست های توپوگرافی که قبلاً ارائه شد، قوی تر کرد. فیلتر کردن بلوک قبلی به طور مکرر با زاویه مجاز بین وجوه محدوده زیر تکرار می شود: از 20- تا 20+ درجه و از 160 تا 200 درجه. بسته های محدود شده با تعداد وجه کمتر از 5 باید حذف شوند.
-
جستجوی قطعات مسطح پیوسته سقف (بلوک 1.9):یک TIN باید بر اساس نقاط انتخاب شده پس از تکمیل فیلتر ثانویه ساخته شود. تمام لبههای دارای برجستگی بیش از حد طولانی در صفحه X، Y از این TIN حذف میشوند. اگر چگالی نقطه 2 یا بیشتر در هر متر مربع باشد، لبه های وجهی که از 1.5 متر بلندتر هستند، همه باید حذف شوند. بسته های به هم پیوسته با مساحت 15 متر مربعو دارای کمتر از 40 وجه هستند، باید حذف شوند. به این ترتیب پینت ها را از بین می بریم که گهگاه یک سطح صاف را در یک بسته کوچک کامل می کنند. افزایش حداقل فاصله بین بسته های مستقل و ایجاد الزامات سخت گیرانه کمتر به دلیل تعداد وجوه در یک بسته به هم پیوسته ممکن است به پردازش برخی از نقاط نازک شده از چگالی نقطه پایین کمک کند. از طرف دیگر، چنین راه حلی ممکن است به طور قابل ملاحظه ای احتمال نتایج طبقه بندی اشتباه را از طریق آن بسته ها افزایش دهد، که گاهی اوقات به نظر می رسد آنهایی که هموار هستند.
-
صاف کردن امتداد سطوح (بلوک 1.10):ما فقط برخی از سطوح سقف با لبه های برش خورده و احتمالاً بدون برخی از اجزای سقف نامرئی را بر روی بلوک های الگوریتمی قبلی ترسیم کرده ایم (به شکل 1 مراجعه کنید ). بنابراین، بر روی این بلوک الگوریتمی یازدهم، ما باید هر قطعه سقف ایزوله را برای محاسبه نقاط همسایگی آن به آرامی گسترش دهیم. این روش از چندین تکرار تشکیل شده است تا زمانی که سطح سقف جدید تولید شده به محدودیت های فضایی تعریف شده برسد یا حداکثر تعداد مجاز تکرار تکمیل شود. بنابراین، ما میتوانیم با ترکیب چند قطعه سقف در یک اتصال به عنوان نتیجه خروجی، یک ناحیه سقف هموار بزرگتر به دست آوریم.در این مرحله از پارامترهای ورودی شاخه غیرزمینی برای بلوکهای الگوریتمی طبقهبندی کننده «1.8-1.10 غیر زمینی» باید برای ورودی به MLD مربوطه تنظیم شود، همانطور که برای مجموعههای انتخابی بلوکهای بالا در هر دو شاخه انجام شده است.
-
پالایش قطعات مسطح سقف با گرفتن نقاط همسایه (بلوک 1.11):روش نهایی اولین شاخه الگوریتمی، افزایش سطوح سقف توسط تمام نقاطی است که در ارتفاع ناچیز از سطح سقف مشتق شده قرار دارند. به این ترتیب، تمام آن نقاطی که قبلاً با نازک شدن نقطه عمدی قبلی از مجموعه نقاط ساختمان حذف شده اند، به عنوان نقاط ساختمان طبقه بندی می شوند.
-
صفحات سقف و نمای ساختمان (به دلیل الگوریتم پایه HPM [ 54 ]) استخراج شده (بلوک 1.12):یک خروجی الگوریتمی کلی شامل مدلهای سه بعدی شهر از ویژگیهای ساختمان و همچنین یک سطح شهری است که دقت بالایی دارد (لبه یک سلول شبکه بیش از 50 سانتیمتر نیست) – با یک بلوک پایانی نشان داده میشود. فلوچارت ( شکل 1 ). حتی تلاشی برای بازسازی “محیط شهری هوشمند” بر اساس اجرای مفهوم شهر هوشمند ممکن است بر اساس این رویکرد ارائه شود [ 9 ].
2.4. نرم افزار چند منظوره مبتنی بر وب و ابر برای اهداف DEM-G/AFE
2.4.1. ELiT Core Desktop و سرور ELiT مبتنی بر وب
ELiT (ابزار EOS Lidar) یک پلتفرم مبتنی بر وب با عنوان سرور ELiT (یک صفحه فرود در https://eos.com/eos-lidar/ موجود است ) و یک برنامه مبتنی بر ابر است که برای منابع نمونه AWS کاربرد دارد. – ژئوپورتال ELIT (EGP). دومی نوعی از پورتال وب است که برای یافتن، دسترسی و پردازش اطلاعات جغرافیایی LiDAR اعم از اولیه و مشتق شده استفاده می شود. این پلتفرم ابری همچنین خدمات جغرافیایی مرتبط (خلاصه، نمایش، ویرایش، تجزیه و تحلیل و غیره) را به طور گسترده با استفاده از انواع مختلف ارائه می دهد. منابع و گزینه های وب ( https://ELiT-portal.eos.com/ ). نرم افزار پیشرو برای این دو مجموعه از ابزارهای پردازش/نمایش داده LiDAR، ELiT دسکتاپ است.نرمافزار هستهای، که اگرچه فقط از نظر MLD تعبیهشده، قبلاً در بالا به آن اشاره کردیم ( شکل 2 ). این نرم افزار حتی تا حد معینی عملکرد گسترده تری دارد، اما می تواند تنها مدل های چند وجهی سنگین وزن را در چارچوب HPM تولید کند. کل خط لوله الگوریتمی AFE که در بالا توضیح داده شد ابتدا فقط در ELiT پیاده سازی شده استبسته اصلی. عملکرد استخراج ساختمان (BE) منحصراً بر اساس الگوریتمهای HPM برای کاربرد مستقل برای ارائه تشخیص، استخراج و بازسازی مدلهای سنگین با توجه به گردش کار کلی الگوریتم طبقهبندی معرفی شده در این متن و با توجه به الگوریتم پایه HPM AFE. این منجر به یک شبکه توپوگرافی به عنوان یک تولید مشخصه پیوسته دقیقاً مطابق با شاخه زمینی راه حل الگوریتمی طبقه بندی می شود و در مجموعه ای از ویژگی های شهری که اشیاء ناپیوسته هستند که از شاخه الگوریتمی غیرزمینی تولید می شوند (شکل 1) نتیجه می شود . ).
یک طرح کلی معماری از یک خانواده کامل از نرم افزار ELiT (یک دسکتاپ، یک سرور مبتنی بر وب و یک ژئوپورتال مبتنی بر ابر) در تصویر زیر مشخص شده است ( شکل 3 ). رویکرد وب-GIS پیادهسازی شده با نمونههای موجود از پیادهسازی ابزارهای اطلاعات جغرافیایی وب [ 84 ] در تضاد نیست ، و به طور مشابه راهحل ما شامل دخالت PostgreSQL/PostGIS به عنوان آن سیستم مدیریت پایگاه داده است که شی گرا است.
بنابراین، بیشترین محاسبات و پردازش در ساختار نرم افزار معماری ارائه شده در این متن برای تبدیل نقاط خام به مدل های سه بعدی اعمال می شود. لازم به تأکید است که این پردازش ها از کاربر پنهان است (به جز برخی موارد استثنا در دسکتاپ ELiT Core)، زیرا در خط لوله سطح بالاتری قرار دارد. بنابراین، یک کاربر فقط باید داده ها و مجموعه ای ضروری از ویژگی های مدل سازی ساختمان را وارد کند. با توجه به طرح معماری نشان داده شده، که یک طرح عملیاتی نیز هست، سرور ELiT رویههای انتقال را بین هسته الگوریتمی و یک سرویس گیرنده وب انجام میدهد، در حالی که مجموعههای رویهای مانند مدیریت داده (بارگذاری داده، دانلود توسط کاربران و غیره)، وظیفه را ارائه میدهد. مدیریت، و تعاملات بین هسته وپایگاه جغرافیایی ELiT . در نهایت، یک کلاینت رابط کاربری و تجسم سطحی مدل ساختمان/توپوگرافی را فراهم می کند ( شکل 3 ). یک مشخصات باز برای تجسم حجم عظیمی از دادههای زمینفضایی کاشیهای سهبعدی سزیوم، که قبلاً در بررسی ادبیات تکمیل شده به دلیل این متن ذکر شده است، برای این نمایشگر استفاده میشود، اما فقط در برنامههای مبتنی بر وب و ابر ما، در حالی که ELiT نرم افزار Core از گزینه های روتین تجسم دسکتاپ پشتیبانی می کند (تصویرهایی از استخراج ساختمان و قابلیت های تشخیص تغییر در شکل 3 ).
هدف همه محصولات ELiT هم عملیات AFE و هم مدل سازی شبکه توپوگرافی با نمایش بیشتر محیط شهری در یک منطقه انتخاب شده است. نتایج پردازش شده در قالبهای مختلف (.KML، .gLTF، .DAE، .B3DM) خروجی میشوند، اما قالب اصلی داخلی .OBJ است. ویژگیهای شهری مدلسازیشده با بازنمایی مرزی آنها تولید میشوند و یک تصویر کامل مجموعهای از ساختمانها با دیوارهای مرزی، لبهها، رئوس و با روابط توپولوژیکی آنها با توجه به ساختوسازهای غیرمسکونی دستساز و شبکههای زیرساختی است. مدلهای شهری ما دارای تمام ویژگیهای لازم مدلهای سهبعدی شهر هستند، اما در حالی که به نظر میرسد بسیاری از مدلهای سه بعدی دیگر عمدتاً برای نمایش استفاده میشوند، به جرات میتوان گفت که ELiTمدل های سه بعدی شهر را می توان به طور فزاینده ای در تعدادی از حوزه ها در محدوده وسیعی از وظایف فراتر از تجسم مستقیم به کار برد.
چهار قابلیت کلیدی سرور ELiT به شرح زیر است ( شکل 3 ):
-
عملکرد استخراج ساختمان (BE) (یک زیر صفحه Building Extraction در صفحه ابزار سرور) مدل سازی چند وجهی بالایی را با توجه به تشخیص ساختمان، استخراج و بازسازی آن از طریق آن راه حل الگوریتمی ارائه می دهد که به طور مفصل در ارائه شده است. بخش قبلی این متن مدلسازی نهایی ساختمان عمدتاً برای ساختمانهای بلند مرتبهای که اغلب در مرکز شهر قرار دارند، هدف قرار میگیرد. ابزار BE ELiTسرور تولید مدل های سنگین وزن را ارائه می دهد که از چند وجهی های متعدد تشکیل شده است، به همین دلیل است که آنها را می توان به عنوان “سنگین” توصیف کرد. تجسم نهایی این مدلها توسط کتابخانه Cesium 3DTiles با سطح مشخصی از جزئیات (LOD) ارائه میشود، در حالی که یک ابر نقطه اولیه Lidar نیز قابل تجسم است. به عنوان یک قاعده، یک مدل BE اجباری دارای ویژگی های مکانی، هندسی و معنایی خود است. بنابراین، محیط شهری عظیم یک شهر را می توان به عنوان مدل های سنگین وزن با جزئیات جزئی شبیه سازی کرد ( شکل 4 ).
-
ابزار منطقه روستایی استخراج ساختمان (BERA) – یک منطقه روستایی استخراج ساختمان در صفحه ابزارها) مدلسازی چند وجهی کم معرفی شده در برخی از متون روششناختی قبلی ما [ 9 ، 53 ، 54] را تکمیل میکند.]. عملکرد BERA تقسیم بندی سلسله مراتبی ابرهای نقطه ای و جداسازی صفحات استخراج شده را با بازسازی ساختمان بیشتر در مناطق روستایی و در حومه شهری انجام می دهد. «مدلهای ساختمانهای سبک» ساختهشده دارای جنبههای بسیار کمتری نسبت به مدلهای سنگینوزن هستند و تعدادی از نکات پردازششده برای چنین مدلهایی فقط به تعداد چند هزار محدود میشوند. تعداد قابل قبول ممکن است با نازک شدن تطبیقی به قیمت برخی جزئیات جزئی بدست آید. تولید حتی “سقف های شیبدار” ساختمان های کم ارتفاع توسط ابزار BERA با تکنیک LPM امکان پذیر است ( شکل 5 ).
-
قابلیت تشخیص تغییر (CD) – یک صفحه فرعی تشخیص تغییر، که در Tools ELiT استصفحه، تغییرات شهری در مقیاس های مختلف را در یک AOI انتخاب شده تشخیص می دهد. تغییرات در مورفولوژی معماری یک شهر معمولاً از طریق گستره فضایی معینی در یک دوره زمانی قابل توجه اتفاق میافتد، اگر فقط یک رویداد شدید تخریب محیطی یا اجتماعی نباشد. عملکرد CD مکان های تغییرات در فضای جغرافیایی مرجع و شکل ساختمان ها و زیرساخت ها را به عنوان مدل های سه بعدی نشان می دهد. به طور معمول دو ابر نقطه (اولیه و دوم به صورت موقت) با هم مقایسه می شوند. عملکرد BE تنها موردی است که برای تعیین تفاوت بین دو ابر نقطه ورودی استفاده می شود که به عنوان دلتای ویژگی های مدل BE محاسبه می شود که به ترتیب به هر یک از این دو ابر تعلق دارد.
-
عملکرد تولید DEM (DEM-G) – یک صفحه فرعی در صفحه ابزارها، تولید یک شبکه از یک سطح توپوگرافی را با ایجاد یک DEM/DSM انجام می دهد، که یک زمین خاص را مطابق با شاخه زمین یک راه حل الگوریتمی معرفی شده منعکس می کند. در بخش قبلی این متن ( شکل 1 ). با این عملکرد، کاربر یک سطح شبکهبندی شده از دادههای نمونه ایجاد میکند، چیزی که درون یابی نامیده میشود. بنابراین، نقاط ارتفاع با فاصله نامنظم اولیه به دست می آیند، که از آنها ارتفاعات با فاصله یکنواخت درون یابی می شوند. مدل رقومی ارتفاع را به عنوان مترادف یک زمین دیجیتالی که سطح زمین برهنه را با فاصله منظم z شبیه سازی می کند، قبول داریم.-ارزش ارتفاع به این ترتیب می توان مدل سازی توپوگرافی برای سطح زمین انواع ژنتیکی مختلف، به عنوان مثال، مانند توپوگرافی پس از یخبندان در تصویر زیر فراهم کرد ( شکل 6 ).
2.4.2. ELiT Geoportal: تجسم ویژگی های شهری با کاشی های سه بعدی سزیوم
هنگامی که ما قبلاً بر کارایی چنین راه حل قوی برای هر دو نرم افزار وب اطلاعات جغرافیایی و ارتقاء خدمات کاربردی آن به عنوان یک Geoportal تأکید کردیم [ 85 ]. ELiT _ژئوپورتال (EGP) را می توان به عنوان یک نوع پورتال وب معرفی کرد که برای یافتن، دسترسی و پردازش اطلاعات جغرافیایی به دست آمده از منابع نقشه برداری لیدار استفاده می شود. یک ژئوپورتال، به عنوان یک موجودیت جغرافیایی، همچنین برای ارائه خدمات مربوطه (ذخیره اولیه داده، تجسم داده های مشتق، ویرایش، تجزیه و تحلیل و غیره) از طریق اینترنت هدف قرار می گیرد. هدف نهایی هر ژئوپورتال به عنوان یک نهاد جغرافیایی معمولاً پشتیبانی از بازاریابی نرمافزار وب است که هسته اصلی آن تبدیل بازدیدکنندگان گاه به گاه این سایت به سرنخهای گرم آن است. علاوه بر این، ژئوپورتال ها به عنوان کاربرد کلیدی هر سیستم اطلاعات جغرافیایی وب توزیع شده پذیرفته شده اند [ 86 ].
در حالی که EGP را به عنوان یک منبع وب مکانی منحصربفرد برای ذخیره، پردازش و تجسم محتوای عظیم اطلاعات مکانی ( https://ELiT-portal.eos.com/ ) توسعه میدهیم، ما بهطور قابلتوجهی مسائل نمایش را بهعنوان موارد کلیدی انتخاب میکنیم و اعمال میکنیم. برای این منظور به CesiumJS (یک کتابخانه متن باز جاوا اسکریپت برای ایجاد کره های سه بعدی، https://cesium.com/ )، و به کاشی های سه بعدی در مورد آن ساختار داده، که ارائه سلسله مراتبی مجموعه داده های بزرگ با ساختمان های گسسته مختلف را ممکن می کند. مدل ها. در حال حاضر تا سی مکان مختلف با مناطق شهری با اندازه های مختلف در حال حاضر در ELIT ارائه شده است.ژئوپورتال. همه نتایج مدلسازی شده بر اساس پردازش دادههای منبع باز لیدار، به عنوان مثال، پروژههای USGS، توسط نرمافزار مبتنی بر ابر ما، در حالی که از منابع AWS برای محاسبات استفاده میکنند، بهدست آمدهاند. ویژگی های کلیدی 25 پروژه مکان یابی پردازش شده با مدل های مطابق با CityGML LOD 1/LOD2 در جدول 1 ارائه شده است .
بنابراین، ما باید یک مسئله مشکل ساز ایجاد ساختار کاشی های سه بعدی و بهینه سازی آن را حل کنیم، در حالی که این ویژگی های تولید شده را از طریق مناطق شهری بزرگ تجسم می کنیم. ساختار سلسله مراتبی یک مجموعه کاشی، به عنوان یک موضوع کلیدی کاشیهای سهبعدی، با نمادگذاری شیء JS (JSON) مشخص میشود – یک قالب متنی مبتنی بر JS برای تبادل داده [ 50 ]. یک مجموعه کاشی، هشت رابطه متقابل را برای همه کاشی ها توصیف می کند (شاخص فضایی). با توجه به مشخصات کاشی های سه بعدی، فرمت فایل .glTF توسط .B3DM به عنوان محموله آن برای انتقال هندسه سه بعدی ساختمان ها، بلکه برای ارائه تمام اطلاعات لازم برای تجسم استفاده می شود. بنابراین، به معنای “.B3DM = .glTF + اطلاعات اسنادی” است.
برای همه دادههای تجسمی، ارجاع جغرافیایی صحیح برای یک سیستم مختصات مشترک، که یک سیستم مختصات جغرافیایی و دکارتی است، الزامی است (ECEF-epsg:4978). حتی اگر داده ها نه با منابع AWS در Geoportal، بلکه توسط سرور ELiT در محلی هاست پردازش شوند، نتایج همه عملکردها – BE، BERA، و CD توسط ELiT نمایش داده می شوند .بیننده بر اساس مشابه. لازم به تاکید است که فقط آن دسته از سیستم های مختصات محلی را می توان برای تجسم به کار گرفت، که می توانند با تبدیل های افین به مختصات ECEF تبدیل شوند. دومی توسط ماتریس تبدیل یا در یک مجموعه tileset یا در یک فایل .glTF تجویز می شود. اندازه فایلهای B3DM ممکن است معنای کلیدی برای تجسم کارایی داشته باشد. این به طور مستقیم بر بارگذاری بیش از حد RAM مشتری تأثیر می گذارد. اولاً، ما تلاش کردهایم الگوریتم سادهشده سزیوم موجود در ساختمان سازههای کاشیهای سهبعدی [ 87 ] را تقویت کنیم، سعی کردیم آن را موازی کنیم، اما شکست خوردیم. سپس ما به سادگی این محلول سزیم را آزمایش کردیم (آن را به عنوان (1)-Solution نامگذاری کردیم:
1. با یک کادر محدود (کاشی ریشه) که تمام هندسه را در بر می گیرد شروع کنید. 2. رابطه بین یک کاشی و هر هندسه را ذخیره کنید. 3. یک کاشی به صف پردازش اضافه کنید. 4. جعبه محدود کننده را به طور مساوی به چهار قسمت کودک تقسیم کنید. 5. برای هر چهارگوش کودک، آنقدر این کار را تکرار کنید تا در هر چهارگوش n مثلث داشته باشید.
به نظر می رسد راه حلی کارآمد باشد زیرا داده ها در فایل های .B3DM بسیار فشرده هستند. با این وجود، چنین راه حل الگوریتمی ممکن است باعث وجود مسائل مشکل ساز زیر شود:
- (1)
-
در یک مورد رایج، پارتیشن بندی کاشیها با حجمهای مرزی مرتبط با آنها برای دو مجموعه داده مختلف، رویههای کاملاً مستقل و بدون اتصال بین آنها هستند. بنابراین، بدیهی است که برای پیوستن به این دو مجموعه کاشیهایی که قبلاً تقسیمبندی شدهاند، یا باید ساختارهای داده درختی آنها را دوباره مرتب کنیم، یا این مجموعهها را تنها با همپوشانی جزئی ترکیب کنیم.
- (2)
-
انتخاب نوع مناسب از حجم محدود و همچنین رویکردی موثر برای سازماندهی سلسله مراتبی آن ضروری است.
- (3)
-
ضرورت به روز رسانی یک مجموعه کاشی (یا چندین مورد از آنها با واحدهای ویژگی جدید)، 3.1. کاربر tilesets را در مقیاس محلی یا منطقه ای 3.2 به روز می کند. لازم است تا tilesets را در مقیاس جهانی (در کل Globe) به روز کنید، 3.3.
راه حل احتمالی برای مسئله مشکل ساز دوم به شرح زیر است. از آنجایی که اساساً با نوع خاصی از مدلهای ویژگی سروکار داریم – با مدلهایی از ساختمانها که مطابق با استانداردهای 3D City GML LOD1/LOD2 هستند – ترجیح داده میشود که یک حجم محدود را بهعنوان «جعبه محدودکننده جهتدار» انتخاب کنید، یک bbox، که دقیقاً متناسب با وسعت جغرافیایی مرجع فضایی صحنه سه بعدی.
راه حل آشکار برای مواجهه با چالش های اولین و سومین مسائل مشکل ساز در هر دو مورد به روز رسانی ساختار کاشی های سه بعدی است، چیزی که تنها می تواند به حفظ انسجام فضایی اجازه دهد. بهروزرسانی کلی یک ساختار، به عنوان یک قاعده، غیرقابل قبول است، زیرا بیش از حد منابع مصرف میکند. در غیر این صورت، می توان با افزودن/حذف یک واحد خاص در کاشی های سه بعدی موجود، یا با پیوستن دو مجموعه کاشی، مشکل را حل کرد. حداکثر سه گزینه مختلف در این زمینه وجود دارد.
گزینه اول: باید بزرگترین bbox ممکن را انتخاب کنید که ممکن است به اندازه گلوب باشد. مورد دوم: کاشی ها باید به گونه ای مطابقت داده شوند که در آن مکان و اندازه یکسانی برای هر مجموعه داده اولیه داشته باشند. می توان آن را با ارجاع جغرافیایی به مبدأ مختصات سیستم ECEF به دست آورد. گزینه سوم شامل تولید ساختار 3D Tile و محتوای مجموعههای کاشی (فایلهای B3DM) به صورت پویا است. سپس، معقول به نظر می رسد که در تجسم جریان کاری خود، برخی از روش ها را از تکنیک های موجود و قبلی گزارش شده پیاده سازی کنیم [ 88 ، 89 ].
در این نقطه جریان کار، لازم است تعریف شود که آیا یک ارجاع فضایی یک bbox به یک شبکه معمولی ممکن است در افزودن/حذف یک واحد به/از مجموعه کاشی های موجود یا در پیوستن دو مجموعه کاشی کمک کند. ما یک مرجع از پارتیشن بندی کاشی معمولی به یک شبکه 2^ n ایجاد می کنیم که n سطحی از پارتیشن بندی کاشی است. ارجاع به یک شبکه معمولی اجازه می دهد تا چندین عملیات ریاضی تقسیم و ضرب را جایگزین عملیات شیفتی کنیم. امکان تعریف وابستگی بین سطح پارتیشن بندی کاشی و LOD (سطح جزئیات) تجسم مدل وجود دارد. کاشی ها باید ایندکس شوند. هر کاشی اندازه خود را دارد (2^ n) و یک شاخص سلول با توجه به مبدا مختصات. یک شاخص سلول به سطح پارتیشن بندی (به اندازه کاشی در یک سطح معین) بستگی دارد. هر شاخص کاشی را می توان با یک سطح پارتیشن بندی و با یک شاخص سلولی (سطح, i , j , k ) تعریف کرد. بنابراین، هر دو کاشی با ساختار کاشی متفاوت، اگر شاخص کاشی یکسانی داشته باشند، یک منطقه را توصیف می کنند. با در نظر گرفتن هر دو “(1)-Solution” ارائه شده در بالا و تکنیک ارائه شده در منابع [ 89 ، 90 ]، ما رویکرد الگوریتمی اصلی را با هدف تجسم و ارائه مجموعههای بزرگی از نتایج مدلسازی شده در جدول 1 توضیح دادهایم.. این کمک کرده است که یک محاسبه را به بخش های مستقل تقسیم کنیم تا آن را در حالت موازی اجرا کنیم. ویژگیهای مجموعه کاشیها برای هر مکان مستلزم ذخیره ویژگیهای هندسی ساختمانها (به عنوان مثال، ارتفاع و منطقه ردپا) در کاشیها است. تصویری یکی از مکانهای EGP (#11) ارائهشده با کاشیهای سهبعدی را نشان میدهد ( شکل 7 ).
3. نتایج: ارائه ویژگی های شهری و DEM در ژئوپورتال با موارد استفاده موضوعی
3.1. تجسم مکان های ژئوپورتال
راهحل الگوریتمی اصلی ما برای ایجاد ساختار کاشیهای سه بعدی برای آن مکانهای ویژه شهری که در ژئوپورتال ELiT نگهداری میشوند، عنوان (2) -Solution (برای مقایسه با “(1) -Solution” است که در بالا به آن اشاره کردیم). “(2) -Solution” کارایی قابل مقایسه با “(1) -Solution” ساختار کاشیهای سهبعدی را ایجاد میکند، اما راهحل ما موازیسازی شده است. این رویکرد حاکی از آن است که ساختار داده سلسله مراتبی (محتوای کاشی) تقسیم شده است، که منجر به یک چهار درخت همپوشانی غیر یکنواخت می شود. محتوا و دنباله الگوریتمی (2) -Solution و “گزینه پیشرفته آن” (دو گزینه در آن وجود دارد – “اولیه” و “پیشرفته”) درون آن به شرح زیر است:
یک ورودی الگوریتمی: مجموعهای از مدلها با وجوه ساده. سیستم مختصات برای هر مدل به عنوان کد EPSG تجویز می شود. فهرستی از رئوس و مجموعهای از وجوه (شاخصهای راس که یک وجه را تعریف میکنند) برای این مدل نیز تجویز میشوند. مدل ها یا در یک سیستم فایل یا در یک پایگاه داده ذخیره می شوند.
-
برای هر مدل باید یک bbox تعریف شود. برای این منظور، هر راس باید به یک سیستم مختصات با EPSG تبدیل شود: 4979 (ECEF)، و یک مقدار مختصات حداقل/حداکثر تعریف شده است (محاسبات موازی).
-
برای هر bbox اندازه آن در امتداد هر محور و یک مرکز این حجم مرزی تعریف می شود. بر اساس یک اندازه تعریف شده، یک سطح پارتیشن بندی و یک موقعیت را در یک مجموعه کاشی ترسیم می کنیم. یک ارتباط بین یک شاخص کاشی و یک شناسه مدل ذخیره می شود (محاسبات موازی).
-
یک مرحله تکمیلی لازم است رتبه یک سطح پارتیشن بندی را کمتر از نه محدود کنیم، به این ترتیب اندازه کاشی (لبه یک مربع) کمتر از 512 متر به دست می آید.
-
شاخصهای بهدستآمده از کاشیها و مقادیر اندازه آنها برای محاسبه چهار درخت پارتیشن بندی کاشی (tileset.json) استفاده میشود.
-
برای محاسبه فایلهای B3DM. (محاسبات موازی برای هر کاشی) لازم است از یک وابستگی بین شاخصهای کاشیها و شناسههای مدلها استفاده شود.
-
پارامترهای اولین بسته آزمایشی برای تجزیه و تحلیل نتایج الگوریتمی “گزینه پیشرفته” برای لبه مربع 512 متر تنظیم شده است (اندازه 1 کاشی 0.262144 کیلومتر مربع است): (1) تعدادی کاشی: 2533 ; (2) زمان تأخیر (برای کل داده): حدود یک و نیم دقیقه. (3) اندازه فایلهای B3DM: حداقل-3 کیلوبایت، (4) حداکثر-1185 کیلوبایت. می بینیم که این بسته آزمایشی برای شهری با مساحت 664 کیلومتر مربع قابل اجرا است ، بنابراین یک شهر بسیار بزرگ را می توان به طور کامل تجسم کرد.
-
پارامترهای بسته آزمایشی دوم برای تجزیه و تحلیل نتایج الگوریتمی این گزینه برای لبه مربع 1024 متر تنظیم شده است (اندازه 1 کاشی 1.0486 کیلومتر مربع است ) : (1) تعدادی کاشی: 719; (2) زمان تأخیر: حدود نیم دقیقه. (3) اندازه فایلهای B3DM: حداقل-3 کیلوبایت، (4) حداکثر-2589 کیلوبایت.
-
مشاهده می شود که این بسته آزمایشی برای منطقه شهری به مساحت 753 کیلومتر مربع قابل اجرا می باشد . بنابراین، حتی یک قلمرو شهری بزرگتر را می توان با این ساختار کاشی تجسم کرد.
سازههای کاشیهای سهبعدی برای همه 25 مکان که با ویژگیهای کمی آنها در جدول 1 توضیح داده شدهاند ، در هر دو چارچوب (1) و (2) -Solutions ساخته شدهاند. تحلیل مختصری از کارایی این سازههای کاشی با توجه به رندر بهینه شده در ادامه این متن ارائه شده است.
ژئوپورتال ELiT نیز اکنون با محتوای Terrain برای چندین مکان EGP بهبود یافته است. یک DEM مربوطه دقیقاً بر اساس راهحلهای الگوریتمی با عملکرد ELiT DEM-G محاسبه میشود، در حالی که یک Terrain با استفاده از Cesium Terrain Provider نمایش داده میشود ( شکل 8 ).
3.2. موارد استفاده موضوعی
دو خط لوله مورد استفاده تکمیل شده اخیراً در EGP شرح داده شده و اجرا شده است: 1. تخمین جمعیت با هندسه ساختمان – جمعیت مورد استفاده (UCP). 2. تخمین مصرف انرژی توسط ساختمانها برای گرمایش و سرمایش – استفاده از انرژی مورد استفاده (UCE). هر دو مورد استفاده ارائه شده در Geoportal امکان کاربرد آنها را در یک بلوک یا در محدوده منطقه و همچنین در کل شهر نشان می دهد. با این وجود، در اکثر پروژه ها باید یک AOI خاص انتخاب شود. اندازه قابل قبول این متن ممکن است اجازه معرفی هر دو تکنیک اجرای این موارد استفاده را در جزئیات ندهد. بنابراین، ما در اینجا فقط چند مفاد انتزاعی مختصر را ارائه می کنیم.
3.2.1. از جمعیت موردی استفاده کنید
UCP به سختی می تواند بیش از حد ارزش گذاری شود، به دلیل کمبود عمومی شناخته شده جمعیت واقعی در پیکربندی های مختلف شهری در یک AOI خاص. علاوه بر این، شهرداریها معمولاً ابزار کم و بیش قابل اعتمادی برای ارزیابی دادههای جمعیتی در فاصله زمانی بین دو سرشماری ندارند، در حالی که این دوره ممکن است به طور متوسط تا ده سال طول بکشد. بنابراین، حداقل برآوردهای تقریبی جمعیت در یک AOI برای بهینه سازی آمادگی برای رویدادهای فوری در یک شهر، یا برای بهبود مدیریت بلایای شهری ضروری است، چیزی که به وضوح توسط سیر رویدادها در مناطق شهری در سراسر جهان تأیید شده است. پدیده همه گیر معاصر
پس از ایجاد روش UCP تخمین جمعیت با هندسه ساختمان، ما به روشهای مختلف اقتصادسنجی و تجزیه و تحلیل دوبعدی GIS، که عمدتاً بر اساس ردپاهای ساختمانی و تراکتهای سرشماری هستند، اعمال کردیم [90 ، 91 ] . ما همچنین این واقعیت شناخته شده را پذیرفتیم که بر اساس آن سنجش از دور شهری جایگاه غالب خود را در یک خط لوله مربوطه می گیرد، و پردازش داده LiDAR دقیقاً برای این منظور بسیار مورد استقبال قرار گرفت [92 ] .
روش گام به گام فضا متریک ساختمان (BSMM) برآورد جمعیت با هندسه مدل ساختمان فقط برای اهداف این تحقیق توسعه داده شده است. اگر خیلی مختصر معرفی شود، محتوای کلیدی این روش شامل موارد زیر است (آنچه در مثالی از مکان EGP در شهر بوستون، ماساچوست، ایالات متحده آمریکا توضیح می دهیم ( شکل 9 ).
1. مدلهای ساختمان استاندارد City GML LOD1 از پروژه داده منبع باز USGS (ابر نقطهای با فرمت LAZ) به عنوان مجموعهای از فایلهای .OBJ و فایلهای JSON. تولید شدهاند. دومی ابرداده های مرتبط مختلف را ذخیره می کند. 2. ردپای ساختمان خودمان استخراج شده در خط لوله HPM، که شامل الگوریتم طبقه بندی دو شاخه ای نیز می شود ( شکل 1)، با آنهایی که از منبع OSM مقایسه شده اند. آن ردپاهایی که مطابقت داشتند به عنوان معیار برای پردازش UCP بیشتر انتخاب شدهاند. سپس، بخشی از معیارها توسط یک ناحیه حداقلی فیلتر شده است. 3. تمام ارتفاعات ساختمان و حجم آنها برای اجرای BSMM محاسبه شده است. 4. سپس ما باید واقعی ترین اطلاعات سرشماری را، در صورت وجود، به دست آوریم، و دریابیم که آیا (1) مرزهای سرشماری منطبق هستند یا مرزهای این مجموعه از معیارهای شناسایی شده را قطع می کنند. (2) مسیرهای سرشماری یا منطبق هستند، یا قطعههای ویژگی بهدستآمده از نقشههای موجود کاربری شهری بر فراز شهر بوستون را قطع میکنند. 5. تجزیه و تحلیل اطلاعات به دست آمده از نقشه های موضوعی کاربری اراضی شهری: انتخاب طبقه ساختمان های مسکونی در مقابل طبقات معدودی از ساختمان های غیر مسکونی. 6. تعداد طبقات برای همه ردپای معیار به عنوان ضریب ارتفاع ساختمان و ارتفاع متوسط طبقه در بوستون (2.5-3.5 متر) پردازش شده است. مقادیر مشخصه ارتفاع طبقاتی برای هر سرشماری از اطلاعات اسنادی مربوطه منبع OSM و از برخی دیگر از منابع موجود شهرداری گرفته شده است. تعداد طبقات محاسبه شده با مقادیر واقعی، در صورت موجود بودن، مقایسه شده و در صورت لزوم تصحیح شده است. 7. ایجاد در یک GIS متنباز (QGIS) یک لایه نقطهای از مرکزها برای همه ردپای معیار مرتبط با فایلهای OBJ. بهدستآمده در مرحله 1. محدود کردن با این نقطه، همه اطلاعات معنایی، اعم از اطلاعات اولیه و مشتق شده را مشخص میکند. 8. در چارچوب مقدمه BSMM، حجم خلاصه ای از ساختمان های مسکونی در یک مسیر سرشماری معین محاسبه می شود. بنابراین، در مراحل 6-8 ما یک لایه از تراکتهای سرشماری با اطلاعات اسنادی تکمیلی از حجم ساختمان (BV) برای هر یک از آنها به دست میآوریم. این رویکرد به عنوان BSMM-BV عنوان شده است. 9. در چارچوب اجرای BSMM، تعداد خلاصه ای از طبقات ساختمان (BS) در ساختمان های مسکونی برای یک مسیر سرشماری معین محاسبه می شود. 10. اعمال روش BSMM-BV برای محاسبه تعداد تقریبی ساکنین در هر ساختمان مسکونی. 11. استفاده از روش BSMM-BS برای محاسبه تعدادی از ساکنان در همان ساختمان ها. 12. مقایسه بین نتایج به دست آمده در مراحل 9 و 10، حذف اعداد شدید (ساکنان بیش از حد در یک خانه کوچک، فقط تعداد کمی از آنها در یک ساختمان بزرگ بخش)، مقایسه نتایج هر دو مرحله با حداقل تعداد واقعی جمعیت در صورت وجود از طریق تراکت های سرشماری 13.شکل 9 ).
به نظر منطقی میرسد که دادههای اولیه لازم برای پیادهسازی UCP را خلاصه کنیم:
-
ابرهای نقطه LAZ؛
-
OSM-footprints به یک ESRI.SHP تبدیل شده است.
-
سه لایه برداری (.SHP) با دادههای سرشماری 2010 – لایهای از مسیرهای سرشماری، لایهای از مجموعههای بلوکهای شهری (گروهی از بلوکها)، لایهای از بلوکهای منفرد [93 ] .
-
لایه برداری موضوعی استفاده از زمین برای ایالت ماساچوست [ 94 ].
علاوه بر مکان EGP بوستون، با در نظر گرفتن اطلاعات معنایی موجود، تخمین جمعیت با استفاده از هندسه ساختمان برای شهر شیکاگو، ایالات متحده آمریکا و برای مونستر، آلمان ارائه شده است. که در واسط Geoportal میتوانیم ببینیم ( شکل 9 )، که در آن فهرستی از مکانها توسط کادر انتخاب جمعیت فیلتر شده است.
3.2.2. از انرژی مورد استفاده کنید
این مورد استفاده کاربردی با طرح تکنولوژیکی UCP مشابه اجرا شده است، اگرچه آشکارا بر پایه مبانی موضوعی دیگر [ 95 ، 96 ، 97 ، 98 ، 99 ] استوار شده است. مشابه گردش کار UCP، تمام پردازش ها در باطن EGP تکمیل می شود و سپس در قسمت جلویی با Cesium JS تجسم می شود ( شکل 10 ).
هدف مورد استفاده، تعریف مقدار متوسط مصرف انرژی سالانه (AAEC) یک ساختمان به دلیل گرمایش در زمستان و سرمایش در تابستان است. قابل تخصیص برای منطقه مصرف انرژی یک ساختمان معین، a، باید طبق استانداردهای اتحادیه اروپا و بر اساس تکنیک از [ 96 ، 97 ] کامپیوتر باشد. بنابراین، ارزش مشخصه نهایی انرژی ساختمان را می توان با تقسیم انرژی مصرفی واقعی یک ساختمان بر مساحت قابل تخصیص تعیین شده-kWh/m2 محاسبه کرد .آ. برای آن مکانهای EGP، که UCE در آنها پیادهسازی شده است (بوستون، مونستر، و شهر لیون، فرانسه)، گردش کار آن به روشی مشابه انجام شد: 1. مجموعهای از فایلهای .OBJ و فایلهای JSON. مربوط به مدلهای 3D CityGML LOD1. برای یک مکان معین با پردازش داده های لیدار منبع باز (هر دو فرمت .LAZ و LAS) با نرم افزار ELiT به دست آمده اند . 2. بر اساس منابع اطلاعاتی UCP، که طبقات کاربری اراضی شهری از آنها به دست آمده است، و با توجه به محتوای تجربی برخی منابع موجود علاوه بر موارد ذکر شده در بالا [100 ، 101 ]]، فرض زیر را انجام داده ایم. در شرایط همه عوامل مساوی دیگر، ساختمان های غیر مسکونی (تجاری) ممکن است 15 تا 30 درصد کمتر از ساختمان های مسکونی انرژی مصرف کنند. بنابراین، ویژگی معنایی کلیدی، نوع عملکرد ساختمان است. به دلیل کمبود داده های معنایی، ما تکنیک اصلی خود را برای تعریف خودکار نوع ساختمان با توپولوژی و هندسه آن (ADBTG) پیاده سازی کرده ایم. برای این منظور، مدلهای CityGML LOD2 برای آن ساختمانها در یک مکان معین LOD 1 تولید شدهاند، که نوع آن را نمیتوان با دادههای معنایی موجود تعریف کرد. 3. یکی دیگر از ویژگیهای کلیدی، ساخت سال است، طبق یک نظم پذیرفته شده: هر چه ساختمان قدیمیتر باشد، انرژی بیشتری مصرف میکند [ 98 ، 100]]. 4. یک ویژگی دیگر—storeysAboveGround یا از منبع OSM به دست می آید یا به عنوان پارامتر مشابهی که در UCP است محاسبه می شود. 5. در صورت وجود اطلاعات (از OSM یا برخی منابع شهرداری) قابل تخصیص برای برخی ساختمانهای مجزا که مربوط به مقادیر kWh/m 2 a و kWh/m 2 سال است، باید برای مقایسه مقادیر واقعی با مقادیر محاسبه شده استفاده شود. 6. انواع استاندارد ساختمان در UCE توسط نرم افزار ELiT در حالت خودکار با تکنیک ADBTG تعریف شده است ، و این اطلاعات مربوط به فایل های .OBJ/.JSON تجویز می شود (این حروف اختصاری با معادل های آلمانی آنها مطابقت دارند [ 97 ، 98) .]: خانه مجردی مستقل — EFH; خانه ردیفی یا دوقلو-RDH; خانه چند خانواده کوچک – KMFN; خانه چند خانواده بزرگ – GMFN; ساختمان های چند طبقه – HH). یک ویژگی معنایی کلیدی دیگر – BuildingType تولید شده و با تمام مدلهای ساختمان مرتبط است. 7. یک منطقه گرمایشی قابل تخصیص و یک حجم گرمایش برای هر ساختمان در یک قلمرو مشخص (یا یک مکان کامل EGP یا یک AOI) محاسبه میشود، که ترجیحاً باید حداقل مقداری از مقادیر واقعی مصرف انرژی واقعی توسط ساختمانها را شامل شود. 8. بر اساس مراحل 1-7، ماتریس معنایی مصرف انرژی ساختمان ساخته شده است. این ماتریس شامل کلاس های AAEC (AG) است که (1) با یک سال ساخت ساختمان تعریف می شود و (2) برای زیر کلاس ها (مثلاً زیر کلاس A-EFH) بر اساس نوع ساختمان ADBTG (مرحله 6) تقسیم می شود. 9. هر سلول از این ماتریس پیش فرض خود را کیلووات ساعت در متر بدست می آورد2 a مقدار، به این ترتیب هر سلول از ماتریس به عنوان الگویی برای تخصیص مقدار AAEC برای یک ساختمان خاص در یک منطقه، در صورت عدم وجود کامل اطلاعات معنایی مرتبط عمل می کند. بنابراین، UCE را می توان بر اساس اطلاعات اسنادی واقعی یا با استفاده از این ماتریس معنایی پیاده سازی کرد. 10. در هر دو مورد، یک صحنه EGP معین از مکان در افسانه استاندارد اتحادیه اروپا در مورد مصرف انرژی ساختمان تجسم شده است.
علاوه بر مکان EGP مونستر، UCE برای شهر بوستون، ماساچوست، ایالات متحده آمریکا و برای لیون، فرانسه ارائه شده است. که میتوانیم در رابط جغرافیایی ( شکل 10 ) ببینیم، جایی که فهرستی از مکانها توسط چک باکس مصرف انرژی فیلتر شده است.
4. بحث
اولین موضوع بحث ممکن است استفاده از الگوریتمهای مدلسازی چند وجهی بالا، از جمله راهحل طبقهبندی که در این متن به تفصیل مورد بررسی قرار گرفته است، یا الگوریتمهای چندوجهی کم باشد که قبلاً در انتشارات قبلی ما معرفی شدهاند [53 ، 54 ] . این الگوریتم طبقهبندی بر اساس ارتفاع نقطهای از سطح متوسط DEM، نقاط LiDAR هوابرد خام را برای دو دسته جدا میکند. اولین مورد شامل نقاط زمینی است که ردپای ساختمان اصلی ما را تشکیل می دهند. دسته دوم شامل نقاط غیر زمینی است که با این ردپای ساختمان خوشهبندی شدهاند. یک خوشه نقطه مرتبط معمولاً یک ساختمان یا یک درخت را نشان می دهد.
برخلاف این گردش کار، رویکرد مدلسازی چند وجهی کم به شدت با «ردپای خارجی» مرتبط است، به این معنی که آنها از منابع شخص ثالث، به عنوان مثال، از منابع OSM به دست میآیند. این ردپاها برای استخراج ابرهای نقطه سه بعدی روی سقف ها استفاده می شود. مزیت آشکار رویکرد HPM در آن زمان به وضوح قابل مشاهده است، زیرا فقدان چند ضلعی های قابل اعتماد یک واقعیت شناخته شده است. به طور خاص، این ویژگی ها در سطح جهانی مناطق کمتری را نسبت به بررسی های LiDAR پوشش می دهند.
یکی دیگر از عملکردهای قوی راه حل الگوریتمی ترکیبی (DEM-G + AFE) ارائه شده در اینجا، راه حل کارآمد با بسیاری از مراحل پالایش است (به صورت تعاملی تنظیم شده – شکل 2 )، که هم شی پیوسته (توپوگرافی) و هم موارد گسسته (ویژگی های شهری) را در داخل تولید می کند. یک گردش کار الگوریتمی مشترک، چیزی که به طور قابل درک تحمل شکست اضافی را برای هر دو شاخه الگوریتمی فراهم می کند ( شکل 1). الگوریتم طبقهبندی دو شاخهای ارائهشده ثابت میکند که HPM عمدتاً بر اساس طبقهبندی ابر نقطه است، در غیر این صورت LPM بر اساس تقسیمبندی در مقیاس بزرگ و خوشهبندی بیشتر در بستههای سقف منفرد است. الگوریتم طبقهبندی بررسیشده نیز برخی از بخشبندیها را در مقیاس کوچک ارائه میکند، اما منجر به بخشهای چند ضلعی متعددی شد که در حالی که بزرگنمایی میشد، سطح کاملاً ناهموار هر بخش ساختمان را نشان میداد ( شکل 4 ). برخلاف آن، “ساختمان های LPM” مجموعه ای از صفحات با وجوه صاف هستند ( شکل 5)). در هر صورت، زمانی که ساختمانهای مرتفع مرکز شهر با مدلسازی چند وجهی بالا (عملکرد استخراج ساختمان) استخراج میشوند، ممکن است یک منطقه شهری مورد استفاده متمایز از نوعی رویکرد “هیبرید” HPM/LPM باشد. یکی از حومه های شهر و نزدیکترین مناطق روستایی – توسط LPM (عملکرد منطقه روستایی استخراج ساختمان).
طرح کلی معماری ارائه شده از خانواده نرم افزارهای ELiT ، که ترکیبی از یک دسکتاپ، یک وب سرور و یک برنامه کاربردی ابری است، ممکن است به عنوان یک راه حل بهینه برای پردازش داده های چند منظوره Lidar برای اهداف مطالعات شهری پذیرفته شود (شکل 3 ) . پردازش و مدلسازی با ELiT Core، یا با سرور ELiT ، و همچنین با ELiT Geoportal ( ELIT Cloud) را میتوان به عنوان ارجحترین مورد برای حل موارد استفاده مختلف در یک بلوک شهری، یک منطقه یا در کل شهر تعریف کرد. دامنه: استفاده از یک محصول نرم افزاری خاص در وابستگی به یک کار مدل سازی تعریف شده.
در چارچوب یک مسئله تجسمسازی، ما از یک مشخصات باز برای تجسم محتوای وب سه بعدی جغرافیایی عظیم – کاشیهای سه بعدی سزیوم در برنامه مبتنی بر ابر خود استفاده کردهایم. بهینهسازی رندر با کاشیهای سهبعدی با مقایسه دو راهحل که در محتوای الگوریتمی آنها با عنوان «(1)-Solution» در مقابل «2)-Solution» که در جزئیات ارائه شده است، اجرا شده است. دومی، (2) – راه حل، راه حل اصلی ما است که می تواند موازی شود، در حالی که (1) – راه حل نمی تواند. علاوه بر این، می تواند تعداد متفاوتی از شماره مدل یا اندازه کاشی در مورد (2) -Solution وجود داشته باشد. اجازه دهید این شمارش ها را به عنوان “گزینه اولیه کاشی های سه بعدی” (برای یک مدل ویژگی در یک کاشی) در مقابل “گزینه کاشی های سه بعدی پیشرفته” (چند مدل ویژگی در یک کاشی) عنوان کنیم.2 منطقه شهری. ویژگی های پارامتری مکان های EGP ( جدول 1 ) به عنوان مبنایی برای مقایسه رندر برای دو گزینه از “(2) -Solution” ما عمل کرده است. از آنجایی که ما فرصتی برای ارائه تحلیل عددی کم و بیش کامل برای چنین مقایسه ای در این متن پایانی نداریم، بنابراین تنها بر معدود اصطلاحات معرف آن تأکید می کنیم:
-
قابل درک است که زمان تأخیر (بارگذاری کامل صفحه) طولانی ترین زمان برای بزرگترین مکان است—#14. با «گزینه اولیه» تا 24 دقیقه زمان میبرد، و باید در نظر بگیریم که فقط جعبههای LOD1 را میتوان برای این مکان ساخت، به دلیل میانگین تراکم نقطه لیدار بسیار پایین برای آن (0.6 امتیاز در هر متر مربع). بنابراین، با اعمال «گزینه پیشرفته»، رندرینگ را تا 10 دقیقه برای همه ویژگیهای مکان مورد نظر تسریع کردهایم.
-
قابل توجه است که هیچ وابستگی مستقیمی بین تعدادی از مدل ها و تأخیر یک صفحه مکان مشخص وجود ندارد. با این وجود، در صورت وجود این وابستگی برای مکانهای LOD1 بیشتر از مکانهای LOD2 مشهود است.
-
بهترین پیشرفتها در رندر (فقط آن مکانها تخمین زده شدند که دارای تعداد قابل توجهی مدل هستند، حداقل – چند ده هزار)، در حالی که میتوان «گزینه اولیه» را با «گزینه پیشرفته» مقایسه کرد: برای مکان #3 زمان تأخیر از 14 دقیقه به 6 دقیقه کاهش یافته است. برای مکان شماره 4: از 17 تا 8؛ مکان شماره 15 به دلایلی (احتمالاً به دلیل مدلهای LOD2 متعدد موجود) حتی طولانیتر از مکان شماره 4 ارائه میشود، علیرغم اینکه مدلهای آن چهار برابر کمتر است. زمان تأخیر برای این مکان با “گزینه اولیه” 18 دقیقه است و با “گزینه پیشرفته” به 7 دقیقه کاهش می یابد.
-
مکانهای دیگری که سرعت 2.5 تا 4 برابری را در رندر نشان میدهند، شماره 1، 6، و 17 هستند ( جدول 1 ).
-
بسیاری از مکانهای دیگر یا هیچکدام را ارائه نمیدهند، یا فقط سرعت کمی در رندر برای “پیشرفته” دارند، در حالی که ما دو “گزینه کاشیهای سه بعدی” را با هم مقایسه میکنیم.
-
هیچ مدرکی برای هیچ مکانی وجود ندارد، زمانی که “گزینه کاشی سه بعدی اولیه” نسبت به “گزینه کاشی سه بعدی پیشرفته” رندر سریع تری داشت.
5. نتیجه گیری ها
پیادهسازی مورد استفاده کاربردی، گردش کار چند منظوره پردازش، مدلسازی و تحلیل دادههای LiDAR را برای حوزه مطالعات شهری نهایی کرده است. تکنیکهای توسعهیافته و پیادهسازیشده برای UCP و UCE شامل پردازش باطنی است که مربوط به تولید مدل LOD1/LOD2 است، و همچنین پردازش از سمت frontend برای تجسم دادههای شناور موضوعی با ساختار کاشیهای سهبعدی در صحنه CesiumJS با گرادیان بیشتر. رنگ آمیزی کلاس های جغرافیایی منتسب. اگر به دلیل هر دو مورد استفاده، اطلاعات واقعی آماری قابل توجهی داشتیم، چنین راه حلی به عنوان یک تکنیک منحصر به فرد برای استفاده کاربردی توسط شهرداری ها انجام می شد. بنابراین، این گردش کار موارد استفاده قطعی نیست، هنوز باید تأیید شود.
بنابراین، ما یک رویکرد چند منظوره جامع برای توپوگرافی شهری و ویژگیهای گسسته استخراج خودکار بر اساس پردازش دادههای هوابرد LiDAR ارائه کردهایم. این تحقیق کاربرد آن را برای مجموعه دادههای مختلف نشان داده است که پیکربندیهای شهری ناهمگن را نشان میدهند. دقیقاً این رویکرد پیادهسازی چرخه تحقیق و توسعه کامل و منحصربهفرد ما را فراهم میکند (از تولید زمین شهری و استخراج ویژگی با پردازش دادههای خام LiDAR تا موارد استفاده موضوعی کاربردی بر اساس مدلهای بهدستآمده):
-
پیش پردازش اولیه داده های LiDAR خام.
-
انتخاب یک راه حل مناسب (به دلیل ماهیت داده ها و تنظیمات شهری محلی) – یا مدل سازی چند وجهی کم، یا چند وجهی بالا.
-
اگر دومی انتخاب شود، ردپای شخص ثالث درگیر نیست، بلکه ردپاهای اصلی طبق الگوریتم پایه HPM استخراج می شوند.
-
ارائه الگوریتم طبقه بندی دو شاخه ای کاملاً اصلی DEM-G/AFE، به دنبال تولید توپوگرافی شهری و استخراج ویژگی با تنظیم سفارشی پردازش در بلوک های الگوریتمی خاص.
-
بهبود طرح معماری موجود خانواده نرم افزار، تغییر تاکید از دسکتاپ به اجزای وب و ابری آن، چیزی که امکان پردازش حجم عظیم داده را فراهم می کند.
-
کاربرد چند منظوره از قابلیت های کلیدی نرم افزار: BE، BERA، CD و DEM-G.
-
توسعه و ایجاد ژئوپورتال ELiT به عنوان یک برنامه کاربردی مبتنی بر ابر در چارچوب یک فناوری وب سرویس گرا.
-
پر کردن ژئوپورتال با پروژه های مدل های 3D CityGML LOD1/LOD2.
-
دستیابی به راهحل الگوریتمی تجسمسازی اصلی، که شامل دو گزینه است، بر اساس بهینهسازی ساختار کاشیهای سهبعدی سزیوم برای ارائه کارآمدتر ویژگیهای شهری در مکانهای ژئوپورتال.
-
اجرای موارد کاربرد موضوعی عملی برای آن مکانها که حداقل برخی از دادههای جغرافیایی ارجاعشده معنایی برای آنها موجود است: برآورد جمعیت با هندسه ساختمان و برآورد مصرف انرژی توسط ساختمانها برای گرمایش و سرمایش.
-
با تحقق این موارد استفاده، راهحلهای منحصربهفرد تکمیلی ارائه شده است، به عنوان مثال، تکنیک اصلی ما برای تعریف خودکار نوع ساختمان با توپولوژی و هندسه آن.
مراحل ارائه شده، چرخه تحقیق و توسعه کامل پردازش داده های LiDAR و به دست آوردن نتایج مشتق شده در این تحقیق را تکه تکه کرده است.
منابع
- اش، تی. تیل، م. شنک، ا. راث، ا. مولر، آ. Dech, S. ترسیم ردپای شهری از داده های TerraSAR-X با تجزیه و تحلیل مشخصات لکه و اطلاعات شدت. IEEE Trans. Geosci. Remote Sens. 2009 , 48 , 905-916. [ Google Scholar ] [ CrossRef ]
- اش، تی. هلدنز، دبلیو. هیرنر، الف. ردپای جهانی شهری. در سنجش از دور شهری ؛ Weng, Q., Quattrochi, D., Gamba, PE, Eds. CRC Press: بوکا راتون، فلوریدا، ایالات متحده آمریکا، 2018؛ صص 34-43. [ Google Scholar ]
- دونگ، پی. Chen, Q. (Eds.) LiDAR Remote Sensing and Applications ; CRC Press: بوکا راتون، فلوریدا، ایالات متحده آمریکا، 2018؛ 246p. [ Google Scholar ]
- لدوچ، تی. مورو، جی. Billen, R. (Eds.) Usage, Usability, and Utility of 3D City Models ; EDP Sciences: Nantes, France, 2012; پ. 320. [ Google Scholar ]
- بیلن، آر. Cutting-Decelle، AF; مارینا، او. د آلمیدا، جی پی; کالیونی، ام. فالکت، جی. لدوچ، تی. مترال، سی. مورو، جی. پرت، جی. و همکاران مدلهای سه بعدی شهر و اطلاعات شهری: مسائل و دیدگاههای کنونی . EDP Sciences: Les Ulis، فرانسه، 2014; صص 1-118. [ Google Scholar ]
- جولین، آ. جعلمه، ک. ویرتانن، جی.-پی. پوکه، م. یلیپولی، ج. واجا، م. Hyyppä، J.; Hyyppä, H. مشخص کردن پروژههای مدلسازی سه بعدی شهر: به سوی یک سیستم هماهنگ هماهنگ. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 55. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- بیلجکی، اف. استوتر، جی. لدوکس، اچ. زلاتانوا، اس. Çöltekin، A. کاربردهای مدل های سه بعدی شهر: بررسی وضعیت هنر. ISPRS Int. J. Geo-Inf. 2015 ، 4 ، 2842-2889. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کوستریکوف، اس.وی. نیمتس، LM; سهیدا، کی. نیمتس، کالیفرنیا؛ Morar, C. Geoinformation Approach to the Urban Geographic System Research (مطالعات موردی منطقه خارکف). 2018. در دسترس آنلاین: https://periodicals.karazin.ua/geoeco/article/view/12429 (در 15 ژوئن 2020 قابل دسترسی است).
- کوستریکوف، سنجش از دور شهری SV با LiDAR برای اجرای مفهوم شهر هوشمند. 2019. در دسترس آنلاین: https://www.readcube.com/articles/10.26565%2F2410-7360-2019-50-08 (در 16 ژوئن 2020 قابل دسترسی است).
- بیلن، آر. زکی، سی. سرویرس، ام. مورو، جی. هالوت، پی. توسعه هستی شناسی فضا: کاربرد در مدل سازی سه بعدی شهر. در کاربرد، قابلیت استفاده و کاربرد مدل های سه بعدی شهر ؛ Leduc, T., Moreau, G., Billen, R., Eds. EDP Sciences: Nantes, France, 2012; صص 1-14. [ Google Scholar ]
- Brenner, C. به سوی تولید تمام اتوماتیک مدل های شهری. بین المللی قوس. فتوگرام Remote Sens. 2000 , 33 , 1-8. [ Google Scholar ]
- زو، س. هو، م. ژانگ، ی. Du, Z. تحقیق و تمرین در مدلسازی سه بعدی شهر. ژئو اسپات. Inf. علمی 2009 ، 12 ، 18-24. [ Google Scholar ] [ CrossRef ]
- یین، ایکس. ونکا، پی. رازدان، ع. تولید مدل های ساختمان سه بعدی از نقشه های معماری: یک بررسی. محاسبات IEEE. نمودار. Appl. 2009 ، 29 ، 20-30. [ Google Scholar ] [ CrossRef ]
- Kolbe، TH در حال ارائه و مبادله مدل های سه بعدی شهر با CityGML. 2009. موجود به صورت آنلاین: https://link.springer.com/chapter/10.1007/978-3-540-87395-2_2، (در 15 ژوئن 2020 قابل دسترسی است).
- گوتز، ام. Zipf، A. به سمت تعریف چارچوبی برای استخراج خودکار مدلهای 3D CityGML از اطلاعات جغرافیایی داوطلبانه. بین المللی J. 3-D Inf. مدل. 2012 ، 1 ، 1-16. [ Google Scholar ] [ CrossRef ]
- کنسرسیوم فضایی باز زبان نشانه گذاری جغرافیای شهر OGC (CityGML) کدگذاری استاندارد 2.0.0 ; کنسرسیوم فضایی باز: Wayland، MA، ایالات متحده آمریکا، 2012. [ Google Scholar ]
- شیلینگ، آ. بولینگ، جی. Nagel, C. استفاده از glTF برای استریم مدلهای شهر سه بعدی CityGML. 2016. موجود آنلاین: https://dl.acm.org/doi/10.1145/2945292. (در 17 مه 2020 قابل دسترسی است).
- بیلجکی، اف. لدوکس، اچ. Stoter، JE نسل مدلهای شهر سه بعدی چند-LOD در CityGML با موتور مدلسازی رویهای Random3Dcity. در مجموعه مقالات اولین کنفرانس بین المللی داده های هوشمند و شهرهای هوشمند، 30 UDMS، اسپلیت، کرواسی، 7 تا 9 سپتامبر 2016. [ Google Scholar ] [ CrossRef ]
- ونگ، کیو. کواتروچی، دی. Gamba, PE (Eds.) سنجش از دور شهری ; CRC Press: بوکا راتون، فلوریدا، ایالات متحده آمریکا، 2018؛ پ. 387. [ Google Scholar ]
- هالا، اچ. برنر، سی. استخراج ساختمان ها و درختان در محیط های شهری. ISPRS J. Photogramm. Remote Sens. 1999 , 54 , 130-137. [ Google Scholar ] [ CrossRef ]
- ماس، HG; Vosselman, G. دو الگوریتم برای استخراج مدل های ساختمان از داده های ارتفاع سنجی لیزری خام. ISPRS J. Photogramm. Remote Sens. 1999 ، 54 ، 153-163. [ Google Scholar ] [ CrossRef ]
- اسکن لیزری هوابرد: وضعیت فعلی و انتظارات آتی آکرمن، اف. ISPRS J. Photogramm. Remote Sens. 1999 ، 54 ، 64-67. [ Google Scholar ] [ CrossRef ]
- الکشر، AF; جیمز، اس بی بازسازی ساختمان های سه بعدی از داده های لیدار. طاق ISPRS. 2002 ، 34 ، 102-107. [ Google Scholar ]
- پو، اس. Vosselman، G. بازسازی مبتنی بر دانش مدلهای ساختمان از دادههای اسکن لیزری زمینی. ISPRS J. Photogramm. Remote Sens. 2009 ، 64 ، 575-584. [ Google Scholar ] [ CrossRef ]
- هالا، ن. Kada, M. به روز رسانی در مورد بازسازی خودکار سه بعدی ساختمان. ISPRS J. Photogramm. Remote Sens. 2010 , 65 , 570-580. [ Google Scholar ] [ CrossRef ]
- Wang, R. مدل سازی ساختمان سه بعدی با استفاده از تصاویر و LiDAR: یک بررسی. بین المللی J. Image Data Fusion 2013 ، 4 ، 273-292. [ Google Scholar ] [ CrossRef ]
- Yan، WY; شاکر، ا. الاشماوی، N. طبقه بندی پوشش زمین شهری با استفاده از داده های هوابرد LiDAR: یک بررسی. سنسور از راه دور محیط. 2015 ، 158 ، 295-310. [ Google Scholar ] [ CrossRef ]
- آهوکاس، ای. کارتینن، اچ. Hyyppä, J. ارزیابی کیفیت دادههای اسکنر لیزری هوابرد. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2003 ، 34 ، 1-7. [ Google Scholar ]
- دورنینگر، پی. Pfeifer, N. یک رویکرد سه بعدی خودکار جامع برای استخراج، بازسازی و تنظیم ساختمان از ابرهای نقاط اسکن لیزری موجود در هوا. Sensors 2008 , 8 , 7323-7343. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لافارژ، اف. مالت، سی. ایجاد مدلهای شهر در مقیاس بزرگ از ابرهای نقطه سه بعدی: رویکردی قوی با نمایش ترکیبی. بین المللی جی. کامپیوتر. Vis. 2012 ، 99 ، 69-85. [ Google Scholar ] [ CrossRef ]
- تئو، TA; تشخیص تغییر مبتنی بر شی، TY Lidar و تعیین نوع تغییر در مناطق شهری. بین المللی J. Remote Sens. 2012 ، 34 ، 968-981. [ Google Scholar ] [ CrossRef ]
- اندرس، NS; Seijmonsbergen، AC; Bouten، W. تشخیص تغییرات ژئومورفولوژیکی با استفاده از استخراج ویژگی مبتنی بر شی از دادههای چند زمانی LiDAR. IEEE Geosci. از راه دور. سنس لت. 2013 ، 10 ، 1587-1591. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فاولر، RA; سامبرگ، ا. سیل، MJ; گریوز، تی جی توپوگرافی و لیدار زمینی. In Digital Elevation Model Technologies and Applications: The DEM Users Manual , 2nd ed.; Maune، DF، Ed. ASPRS: Bethesda، MD، ایالات متحده آمریکا، 2007; صص 199-252. [ Google Scholar ]
- کائو، ال. Coops، NC; اینس، جی ال. دای، جی اس؛ روآن، اچ. او، G. طبقهبندی گونههای درختی در جنگلهای نیمه گرمسیری با استفاده از دادههای LiDAR شکل تمام موج با ردپای کوچک. بین المللی J. Appl. زمین Obs. 2016 ، 49 ، 39-51. [ Google Scholar ] [ CrossRef ]
- کادا، م. مک کینلی، L. بازسازی ساختمان سه بعدی از LiDAR بر اساس رویکرد تجزیه سلولی. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2009 ، 38 ، 47-52. [ Google Scholar ]
- لی، ام. نان، ال. اسمیت، ن. Wonka, P. بازسازی مدل های انبوه ساختمان از تصاویر uav. محاسبه کنید. نمودار. 2016 ، 54 ، 84-93. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لاندا، جی. Prochazka, D. موجودی خودکار جاده با استفاده از LiDAR. Procedia Econ. مالی 2014 ، 12 ، 363-370. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آلهارتی، ا. فیلتر Bethel، J. Heuristic و استخراج ویژگی های سه بعدی از داده های LiDAR. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2002 ، 34 ، 23-28. [ Google Scholar ]
- سیتول، جی. ووسلمن، جی. فیلتر کردن داده های اسکنر لیزری هوابرد بر اساس ابرهای نقطه تقسیم شده. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2005 ، 34 ، 66-71. [ Google Scholar ]
- شان، جی. Sampath، A. استخراج ساختمان از ابرهای نقطهای LiDAR سه بعدی بر اساس تکنیکهای خوشهبندی. در محدوده لیزری توپوگرافی و اسکن: اصول و پردازش ; Shan, J., Toth, CK, Eds. CRC Press: Boca Raton، FL، USA، 2008; صص 423-446. [ Google Scholar ] [ CrossRef ]
- لافارژ، اف. دسکامبز، ایکس. زروبیا، ج. Pierrot-Deseilligny، M. استخراج خودکار ساختمان از DEM ها با استفاده از رویکرد شی و کاربرد در مدل سازی سه بعدی شهر. J. Photogramm. Remote Sens. 2008 , 63 , 365-381. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- چن، سی. لی، ی. لی، دبلیو. دای، اچ. الگوریتم طبقه بندی سلسله مراتبی چند وضوحی برای فیلتر کردن داده های LiDAR موجود در هوا. J. Photogramm. Remote Sens. 2013 , 82 , 1-9. [ Google Scholar ] [ CrossRef ]
- واینمن، ام. اشمیت، آ. مالت، سی. هینز، اس. روتنشتاینر، اف. Jutzi، B. طبقهبندی متنی دادههای ابر نقطهای با بهرهبرداری از همسایگیهای سه بعدی فردی. ISPRS Int. ان فتوگرام حسگر از راه دور اسپات. Inf. علمی 2015 ، 2 ، 271-278. [ Google Scholar ]
- دالنر، جی. Buchholz, J. مدلسازی مستمر سطح جزئیات ساختمانها در مدلهای سه بعدی شهر. 2005. در دسترس آنلاین: https://dl.acm.org/doi/10.1145/1097064.1097089 (در 10 مارس 2020 قابل دسترسی است).
- مولر، پی. ونکا، پ. هیگلر، اس. اولمر، ا. مدل سازی رویه ای ساختمان ها Gool، LV. 2006. در دسترس آنلاین: https://dl.acm.org/doi/10.1145/1141911.1141931 (در 3 ژوئیه 2020 قابل دسترسی است).
- Brenner, C. بازسازی ساختمان از تصاویر و اسکن لیزری. بین المللی J. Appl. زمین Obs. 2005 ، 6 ، 187-198. [ Google Scholar ] [ CrossRef ]
- لین، اچ. گائو، جی. ژو، ی. لو، جی. بله، م. Zhang، C. تجزیه معنایی و بازسازی صحنه های مسکونی از داده های LiDAR. ACM Trans. نمودار. 2013 ، 32 ، 61-66. [ Google Scholar ] [ CrossRef ]
- نمای کلی سزیوم، GS 3D-Tiles/3D-Tiles. در دسترس آنلاین: https://github.com/CesiumGS/3d-tiles/blob/master/3d-tiles-overview.pdf (در 18 ژوئیه 2020 قابل دسترسی است).
- گرین، آی. گروانگ، سی. ویلا، I. تبدیل تجسم شهر به بعد سوم با ابرهای نقطه ای، کاشی های سه بعدی و Deck.gl. 2019. در دسترس آنلاین: https://eng.uber.com/3d-tiles-loadersgl/ (در 19 ژوئیه 2020 قابل دسترسی است).
- چن، ی. شورج، ا. رجبی فرد، ع. صبری، اس. از IFC تا کاشی های سه بعدی: یک راه حل منبع باز یکپارچه برای تجسم BIM ها بر روی سزیم. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 393. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- دو، اس. ژانگ، ی. زو، ز. خو، اس. او، X. Chen, S. استخراج خودکار ساختمان از ترکیب دادههای LiDAR ویژگیهای مبتنی بر نقطه و شبکه. ISPRS J. Photogram. Remote Sens. 2017 , 130 , 294–307. [ Google Scholar ] [ CrossRef ]
- کوستریکوف، اس. پودلو، آر. Kostrikova، A. سه قابلیت کلیدی EOS LiDAR Tool برای مطالعات شهری. در مجموعه مقالات سی و نهمین کنفرانس آسیایی سنجش از دور (ACRS 2018): سنجش از راه دور باعث رونق می شود، کوالالامپور، مالزی، 15 تا 19 اکتبر 2018 ؛ AARS: توکیو، ژاپن؛ Curran Associates Inc.: Red Hook، نیویورک، ایالات متحده آمریکا، 2019؛ جلد 3، ص 1676–1685. [ Google Scholar ]
- کوستریکوف، اس. پودلو، آر. کوستریکووا، آ. Bubnov, D. مطالعه ویژگی های شهری با رویکرد چند منظوره برای پردازش داده LiDAR. در مجموعه مقالات رویداد مشترک سنجش از دور شهری JURSE 2019: روشهای جدید برای بررسی شهری از طریق سنجش از دور، وان، فرانسه، 22 تا 24 مه 2019. [ Google Scholar ] [ CrossRef ]
- کوستریکوف، اس.وی. بوبنوف، دی. Pudlo، مطالعات سه بعدی محیط شهری RA با استخراج خودکار ویژگی از ابرهای نقطه LiDAR. 2020. در دسترس آنلاین: https://www.researchgate.net/publication/342897712_Urban_Environment_3D_studies_by_Automated_Feature_Extraction_from_LiDAR_Point_Clouds (در 20 جولای 20).
- Opitz، DW; رائو، آر. Blundell، JS Automated 3-D استخراج ویژگی از زمینی و هوابرد Lidar. در کمیسیون ISPRS IV: پل زدن سنجش از دور و GIS، مجموعه مقالات اولین کنفرانس بین المللی تجزیه و تحلیل تصویر مبتنی بر شی، سالزبورگ، اتریش، 4-5 ژوئیه 2006 . ISPRS: سیدنی، NSW، استرالیا، 2006. [ Google Scholar ]
- لیو، ایکس. Zhang, Z. کاهش داده LIDAR برای تولید DEM کارآمد و با کیفیت. در مجموعه مقالات کنگره بیست و یکم انجمن بین المللی فتوگرامتری و سنجش از دور (ISPRS 2008)، پکن، چین، 3 تا 11 ژوئیه 2008. [ Google Scholar ]
- الکساندر، سی. اسمیت وویسی، اس. جارویس، سی. Tansey، K. یکپارچه سازی ردپای ساختمان و داده های ارتفاعی LiDAR برای طبقه بندی سازه های سقف و تجسم ساختمان ها. محاسبه کنید. محیط زیست سیستم شهری 2009 ، 33 ، 285-292. [ Google Scholar ] [ CrossRef ]
- سمپات، ع. شان، جی. تقسیمبندی و بازسازی سقفهای ساختمانهای چند وجهی از ابرهای نقطهای هوایی لیدار. IEEE Trans. Geosci. از راه دور. Sens. 2009 , 48 , 1554-1567. [ Google Scholar ] [ CrossRef ]
- یان، جی. جیانگ، دبلیو. Shan, J. یک راه حل جهانی برای بازسازی توپولوژیکی مدل های سقف ساختمان از ابرهای نقطه LiDAR در هوا. ISPRS Int. ان فتوگرام حسگر از راه دور اسپات. Inf. علمی 2016 ، 3 ، 379-386. [ Google Scholar ] [ CrossRef ]
- Quackenbush، LJ مروری بر تکنیکهای استخراج ویژگیهای خطی از تصاویر. فتوگرام مهندس از راه دور. Sens. 2004 , 70 , 1383-1392. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لینارس، اس. Picone, N. کاربرد سنجش از دور و مدل اتوماتای سلولی برای تحلیل و شبیهسازی تغییرات تراکم شهری. در سنجش از دور شهری ، ویرایش دوم؛ Weng, Q., Quattrochi, D., Gamba, PE, Eds. مطبوعات CRC: بوکا رانتون، فلوریدا، ایالات متحده آمریکا، 2018؛ صص 268-287. [ Google Scholar ]
- فلنر، سی. واجا، م. جااکولا، ا. کروکس، آ. کارتینن، اچ. کوکو، ا. کسوی، ای. هایپا، اچ. Hyyppä، J.; Alho, P. نقشه برداری بدون درز از کانال های رودخانه با وضوح بالا با استفاده از LiDAR موبایل و عکاسی با پهپاد. Remote Sens. 2013 , 5 , 6382–6407. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- حبیب، اف. ژای، ر. کیم، سی. تولید مدلهای ساختمانهای چندوجهی پیچیده با ادغام تصاویر استریو هوایی و دادههای لیدار. فتوگرام. مهندس Remote Sens. 2010 ، 76 ، 609-623. [ Google Scholar ] [ CrossRef ]
- یوچم، ا. Hцfle، B. ویچمن، وی. روتزینگر، ام. Zipf، A. تقسیمبندی صفحه سقف در سطح منطقه در ابرهای نقطه LIDAR در هوا. محاسبه کنید. محیط زیست سیستم شهری 2012 ، 36 ، 54-64. [ Google Scholar ] [ CrossRef ]
- بورمن، دی. السبرگ، جی. لینگمن، ک. Niichter، A. تبدیل 3 بعدی هاف برای تشخیص هواپیما در ابرهای نقطه: بررسی و طراحی جدید انباشته. 3D Res. 2011 ، 2 ، 1-13. [ Google Scholar ] [ CrossRef ]
- هن، ا. گروگر، جی. استروه، وی. Plumer، V. مدل رانده بازسازی سقفها از ابرهای نقطهای سه بعدی LiDAR. ISPRS J. Photogramm. Remote Sens. 2013 ، 76 ، 17-29. [ Google Scholar ] [ CrossRef ]
- مالتزوس، ای. Ioannids، C. استخراج خودکار سقفهای ساختمان از دادههای هوابرد LiDAR با اعمال و توسعه تبدیل تصادفی سه بعدی Hough. در مجموعه مقالات کنگره XXIII ISPRS، پراگ، جمهوری چک، 12 تا 19 ژوئیه 2016. ص 209-221. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مالتزوس، ای. دولامیس، ا. دولامیس، ن. Ioannidis، C. استخراج ساختمان از داده های LiDAR با استفاده از شبکه های عصبی پیچیده عمیق. IEEE Geosci. از راه دور. سنس لت. 2018 ، 16 ، 155-159. [ Google Scholar ] [ CrossRef ]
- لافارژ، اف. دسکامبز، ایکس. زروبیا، ج. Pierrot-Deseilligny، M. رویکرد ساختاری برای بازسازی ساختمان از یک DSM واحد. IEEE Trans. الگوی مقعدی ماخ هوشمند 2010 ، 32 ، 135-147. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- فایفر، ن. Mandlburger، G. LiDAR فیلترینگ داده و تولید مدل زمین دیجیتال. In Topographic Laser Ranging and Scanning: Principles and Processing , 2nd ed.; Shan, J., Toth, CK, Eds. CRC Press: بوکا راتون، فلوریدا، ایالات متحده آمریکا، 2018؛ ص 456-490. [ Google Scholar ] [ CrossRef ]
- شان، جی. Sampath، A. تولید DEM شهری از داده های خام LiDAR: یک الگوریتم برچسب گذاری و عملکرد آن. فتوگرام مهندس Remote Sens. 2009 ، 75 ، 427-442. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پولات، ن. اویسال، م. Toprak، AS بررسی فرآیند تولید DEM بر اساس روشهای فیلتر کردن دادههای LiDAR، decimation و interpolation برای یک منطقه شهری. اندازه گیری 2015 ، 75 ، 50-56. [ Google Scholar ] [ CrossRef ]
- فریلند، تی. هیونگ، بی. برلی، دی وی؛ کلارک، جی. Knudby، A. استخراج خودکار ویژگی برای اکتشاف و تجزیه و تحلیل کارهای خاکی تاریخی از LiDAR هوایی در پادشاهی تونگا. J. Archaeol. علمی 2016 ، 69 ، 64-74. [ Google Scholar ] [ CrossRef ]
- Vosselman، G. فیلتر بر اساس شیب داده های ارتفاع سنجی لیزری. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2000 ، 33 ، 935-942. [ Google Scholar ]
- Liu, X. Airborne LiDAR برای نسل DEM: برخی مسائل مهم. Prog. فیزیک Geogr. 2008 ، 32 ، 31-49. [ Google Scholar ] [ CrossRef ]
- ژانگ، ک. ویتمن، دی. مقایسه سه الگوریتم برای فیلتر کردن دادههای LiDAR موجود در هوا. فتوگرام مهندس Remote Sens. 2005 ، 71 ، 313-324. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- منگ، ایکس. وانگ، ال. سیلوان-کاردناس، جی. Currit، N. یک الگوریتم چند جهته فیلتر زمین برای LIDAR در هوا. ISPRS J. Photogramm. Remote Sens. 2009 ، 64 ، 117-124. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- منگ، ایکس. وانگ، ال. Currit، N. تشخیص ساختمان مبتنی بر مورفولوژی از دادههای هوابرد Lidar. فتوگرام مهندس از راه دور. Sens. 2009 ، 75 ، 437-442. [ Google Scholar ] [ CrossRef ]
- چن، کیو. گونگ، پی. بالدوکی، دی. Xie, G. فیلتر کردن دادههای اسکن لیزری هوابرد با روشهای ریختشناسی. فتوگرام مهندس از راه دور. Sens. 2007 , 73 , 175-185. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- اندرسون، ES; تامپسون، جی. اثرات تراکم آستین، RE LiDAR و درون یاب خطی بر برآورد ارتفاع. بین المللی J. Remote Sens. 2015 ، 36 ، 3889-3900. [ Google Scholar ] [ CrossRef ]
- باندیوپادیای، م. ون آرت، یان؛ Cawse-Nicholson, K. طبقه بندی و استخراج درختان و ساختمان ها از صحنه های شهری با استفاده از LiDAR بازگشت گسسته و تصاویر رنگی هوایی. در مجموعه مقالات دفاع، امنیت و سنجش SPIE، بالتیمور، MD، ایالات متحده، 29 آوریل تا 3 مه 2013. جلد 8731، صص 05-1-05-9. [ Google Scholar ] [ CrossRef ]
- Magruder، LA; لی، HW; سودرلوند، ا. کلایمر; بایر، جی. Neuenschwander، AL استخراج ویژگی خودکار برای ابرهای نقطه سه بعدی. در مجموعه مقالات دفاع، امنیت و سنجش SPIE، بالتیمور، MD، ایالات متحده، 17 تا 21 آوریل 2016. [ Google Scholar ] [ CrossRef ]
- اوهوری، کالیفرنیا؛ بیلجکی، اف. کومار، ک. لدوکس، اچ. Stoter، J. مدلسازی شهرها و مناظر به صورت سه بعدی با CityGML. در مدل سازی اطلاعات ساختمان ; Springer: برلین/هایدلبرگ، آلمان، 2018; صص 199-215. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سینگ، پی. چوتیا، دی. Sudhakar, S. توسعه یک برنامه GIS مبتنی بر وب برای سیستم اطلاعات فضایی منابع طبیعی با استفاده از نرم افزار و استانداردهای منبع باز موثر. بین المللی جی. جئوگر. Inf. علمی 2012 ، 4 ، 261-266. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کوستریکوف، اس. واسیلیف، وی. پودلو، آر. Bubnov, D. تحقیق محیط شهری از طریق شبیه سازی آن توسط پردازش داده های لیدار. در مجموعه مقالات REGION-2019: استراتژی برای توسعه مطلوب، خارکف، اوکراین، 16 تا 18 اکتبر 2019؛ ص 34-37، به زبان اوکراینی با خلاصه انگلیسی. [ Google Scholar ]
- Beauont، P. لانگلی، پی. مگوایر، دیجی پورتالهای اطلاعات جغرافیایی – دیدگاه بریتانیا. محاسبه کنید. محیط زیست سیستم شهری 2005 ، 29 ، 49-69. [ Google Scholar ] [ CrossRef ]
- لی، جی. بهینه سازی زیرشاخه ها در ساختارهای داده های فضایی. در دسترس آنلاین: https://cesium.com/blog/2017/03/30/spatial-subdivision/ (دسترسی در 4 اوت 2020).
- سیگول، ز. دونو، اس. اوانگلاکوس، دی. مارا، م. مک گوایر، ام. Meyer, Q. Survey of Efficient Resents for Independent Unit Vectors. جی. کامپیوتر. نمودار. فنی 2014 ، 3 ، 1-30. در دسترس آنلاین: https://jcgt.org/published/ (در 1 اوت 2020 قابل دسترسی است).
- Cozzi, P. معرفی کاشی های سه بعدی. در دسترس آنلاین: https://cesium.com/blog/2015/08/10/introducing-3d-tiles/ (در 29 ژوئیه 2020 قابل دسترسی است).
- اسمیت، SK; Mandell, M. مقایسه روشهای برآورد جمعیت: واحد مسکن در مقابل جزء II، همبستگی نسبت و سوابق اداری. مربا. آمار دانشیار 1984 ، 79 ، 282-289. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Lo, CP جمعیت برآورد با استفاده از رگرسیون وزنی جغرافیایی. GIScience Remote. Sens. 2008 , 45 , 131-148. [ Google Scholar ] [ CrossRef ]
- دونگ، پی. رامش، س. نپالی، الف. ارزیابی برآورد جمعیت منطقه کوچک با استفاده از داده های LiDAR، Landsat TM و بسته. بین المللی J. Remote Sens. 2010 , 31 , 5571-5586. [ Google Scholar ] [ CrossRef ]
- MassGIS (دفتر اطلاعات جغرافیایی). داده های MassGIS: لایه های داده از سرشماری 2010 ایالات متحده. 2012. در دسترس آنلاین: https://docs.digital.mass.gov/dataset/massgis-data-datalayers-2010-us-census (در 5 فوریه 2020 قابل دسترسی است).
- MassGIS (دفتر اطلاعات جغرافیایی). داده های MassGIS: کاربری زمین (2005). 2009. در دسترس آنلاین: https://docs.digital.mass.gov/dataset/massgis-data-land-use-2005 (در 9 مارس 2020 قابل دسترسی است).
- دولنر، جی. کلبه، تی. لیکه، اف. اسگوروس، تی. Teichmann، K. مدل شهر سه بعدی مجازی برلین – مدیریت، یکپارچه سازی و ارتباط اطلاعات پیچیده شهری. در مجموعه مقالات بیست و پنجمین سمپوزیوم بین المللی مدیریت داده های شهری UDMS، آلبورگ، دانمارک، 15 تا 17 مه 2006. [ Google Scholar ]
- Carrión، D. برآورد وضعیت انرژی ساختمانها برای شهر برلین با استفاده از مدلی که در مدل شهر سه بعدی شهر GML ارائه شده است. پایان نامه کارشناسی ارشد، دانشگاه فنی برلین، برلین، آلمان، 2010; پ. 178. [ Google Scholar ]
- کاریون، دی. لورنز، ا. Kolbe، T. برآورد وضعیت توانبخشی انرژی ساختمان ها برای شهر برلین با استفاده از یک مدل شهر سه بعدی ارائه شده در CityGML. در مجموعه مقالات کنفرانس ISPRS: کنفرانس بین المللی در زمینه اطلاعات جغرافیایی سه بعدی، برلین، آلمان، 3-4 نوامبر 2010. جلد XXXVIII-4/W15، صص 31-35. [ Google Scholar ]
- نوول، آر. شولت، سی. ایکر، یو. پیتروشکا، دی. Coors، V. مدل شهر سه بعدی مبتنی بر CityGML برای تشخیص انرژی و حمایت از سیاست انرژی شهری. در مجموعه مقالات سیزدهمین کنفرانس انجمن بین المللی شبیه سازی عملکرد ساختمان، Chambéry، فرانسه، 26-28 اوت 2013. ص 218-225. [ Google Scholar ]
- استزالکا، ا. ایکر، یو. کورز، وی. شوماخر، جی. مدلسازی تقاضای انرژی برای گرمایش در مقیاس شهر. در مجموعه مقالات چهارمین کنفرانس ملی IBPSA-USA، نیویورک، نیویورک، ایالات متحده آمریکا، 11-13 اوت 2010; صص 358-364. [ Google Scholar ]
- جافال، آی. اینارد، سی. Ghiaus, C. روش سریع برای پیشبینی تقاضای گرمایش ساختمان بر اساس طراحی آزمایشها. انرژی ساخت. 2009 ، 41 ، 669-677. [ Google Scholar ] [ CrossRef ]
- کارنیرو، سی. استخراج شاخصهای کیفیت محیطی شهری با استفاده از مدلهای سطح دیجیتال مبتنی بر LiDAR. Ph.D. پایان نامه، دانشکده پلی تکنیک فدرال لوزان، لوزان، سوئیس، 2011. [ Google Scholar ]
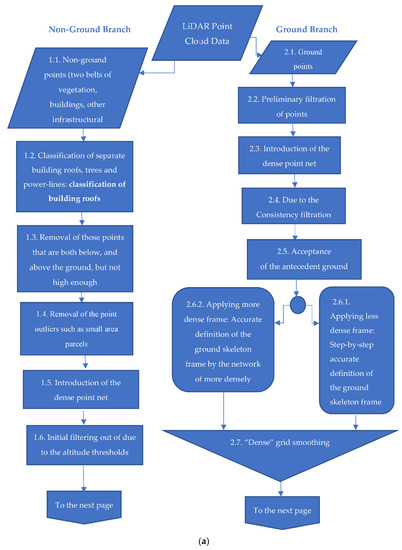
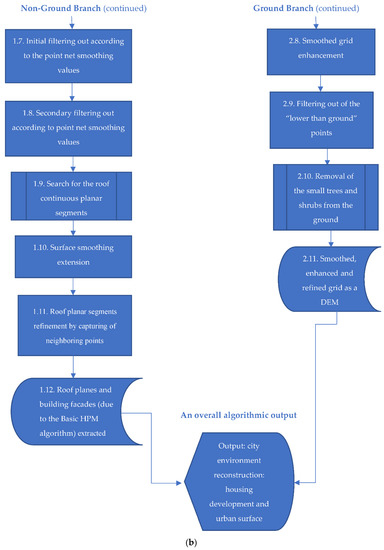
شکل 1. ( الف ) قسمت بالایی فلوچارت به دلیل راه حل الگوریتمی تولید مدل های ارتفاعی دیجیتال دو شاخه ای (DEM-G)/ استخراج ویژگی خودکار (AFE) در چارچوب های مدل سازی چند وجهی بالا (HPM). فقط داده های هوابرد لیدار (ALS) بر اساس این نمودار جریان پردازش می شوند. ( ب ) قسمت پایین فلوچارت به دلیل حل الگوریتمی دو شاخه ای DEM-G/AFE در چارچوب های HPM. فقط داده های ALS بر اساس این فلوچارت پردازش می شوند.

شکل 2. پارامترهای ورودی برای بلوک های طبقه بندی دوم و ششم شاخه زمین راه حل الگوریتمی دو شاخه ای DEM-G/AFE در چارچوب های HPM (شکل 1 ) .
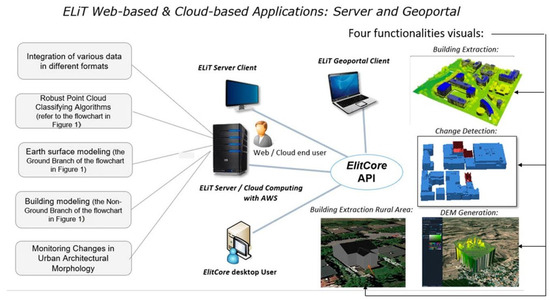
شکل 3. یک طرح کلی معماری از خانواده نرم افزار EOS LIDAR Tool ( ELiT ): دسکتاپ هسته ELiT ، سرور مبتنی بر وب ELiT و ژئوپورتال ELiT مبتنی بر ابر .
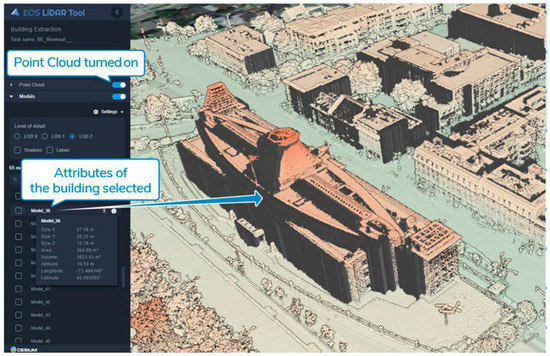
شکل 4. تجسم هر دو مدل ابر نقطه ای و HPM-building با ویژگی های آنها برای مرکز شهر مونترال، کبک، کانادا. تصویر از رابط وب سرور ELiT ارائه شده است .
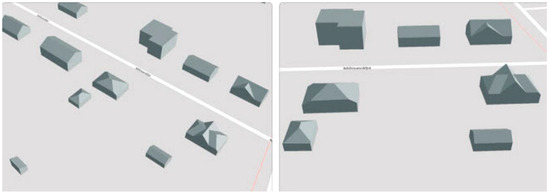
شکل 5. تجسم سقف های مسطح، شیروانی و شیبدار که متعلق به مجموعه ای از مدل های ساختمانی LPM تولید شده برای منطقه شهری در شهر تارتو، استونی است. تصویر از رابط وب سرور ELiT ارائه شده است . یک نقشه جهانی رایگان، نقشه خیابان باز (OSM) به عنوان نقشه جهانی جهانی، به عنوان پایه زمینی استفاده می شود.
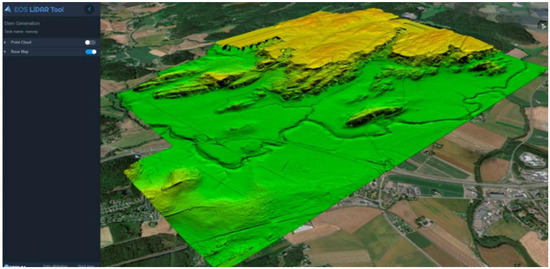
شکل 6. تجسم لندفرم های پس از یخبندان در نروژ. تصویر از رابط وب سرور ELiT ارائه شده است .
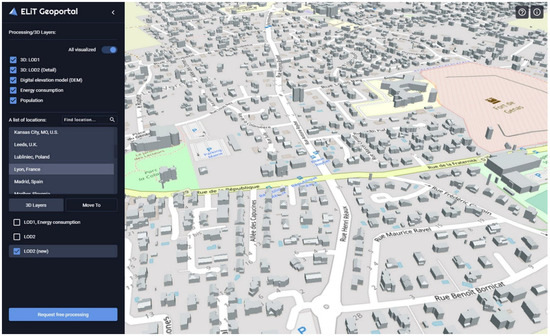
شکل 7. بخشی از یک منطقه شهری کامل از لیون، فرانسه که در Geoportal به عنوان مدل های 3D CityGML LOD2 ارائه شده است. OSM به عنوان پایه زمینی استفاده می شود.
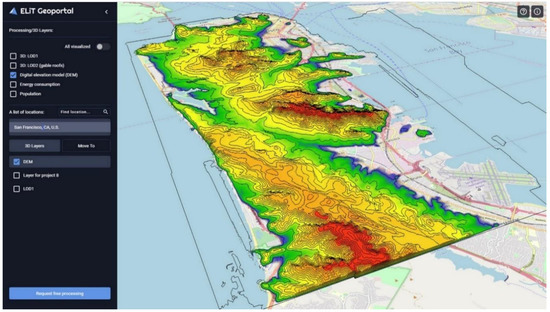
شکل 8. DEM منطقه شهری سانفرانسیسکو که بر اساس شاخه زمینی الگوریتم دو شاخه محاسبه شده است ( شکل 1 ). در EGP توسط Cesium Terrain Provider تجسم شده است.
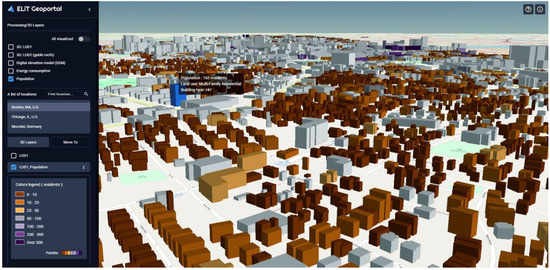
شکل 9. قطعه ای از یک منطقه شهری کامل از شهر بوستون، ماساچوست، ایالات متحده آمریکا، که در ژئوپورتال به عنوان مدل های 3D City GML LOD1 با استفاده از مورد استفاده پیاده سازی شده تخمین جمعیت با هندسه ساختمان ارائه شده است.

شکل 10. قطعه ای از یک منطقه شهری کامل از شهر مونستر، آلمان، که در ژئوپورتال به عنوان مدل های 3D City GML LOD1 با استفاده از مورد اجرا شده برآورد مصرف انرژی توسط ساختمان ها ارائه شده است.


بدون دیدگاه