

خلاصه
کلید واژه ها:
وای فای ؛ RTT _ موقعیت یابی داخلی ؛ شناسایی LOS ; کالیبراسیون برد ; الگوریتم LS
1. معرفی
- (1)
-
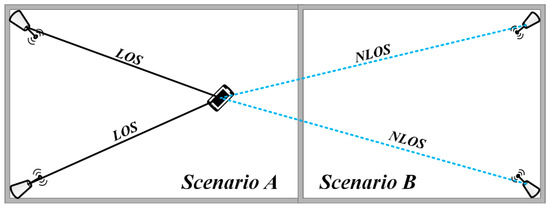
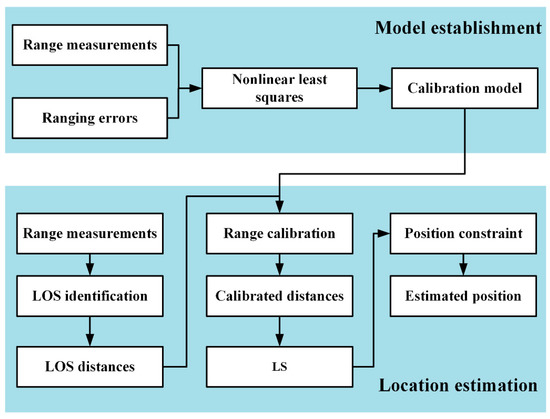
ما یک روش شناسایی NLOS و LOS را بر اساس تشخیص سناریو پیشنهاد میکنیم. در رویکرد شناسایی NLOS و LOS پیشنهادی، سناریوی موقعیتیابی فعلی باید شناسایی شود، و سپس فاصله اندازهگیری LOS با سناریوی شناساییشده به دست میآید، که از تأثیر فواصل NLOS بر دقت موقعیتیابی جلوگیری میکند.
- (2)
-
یک روش تشخیص سناریو بر اساس GPR برای تشخیص صحنه موقعیت یابی پیشنهاد شده است که نیازی به جمع آوری داده های آموزشی ندارد و از فواصل واقعی بین گوشی های هوشمند و نقاط دسترسی (APs) به عنوان داده های آموزشی استفاده می کند.
- (3)
-
یک مدل کالیبراسیون برد آسان برای اصلاح اندازهگیری برد در شرایط LOS ایجاد شده است و موقعیت تلفن هوشمند با این فواصل کالیبره شده تخمین زده میشود. سپس، با اطلاعات موقعیت سناریوی موقعیت یابی، موقعیت تخمین زده شده فراتر از سناریو مهار می شود تا اطمینان حاصل شود که در صحنه موقعیت یابی قرار دارد.
2. کارهای مرتبط
3. روش ها
3.1. وای فای RTT
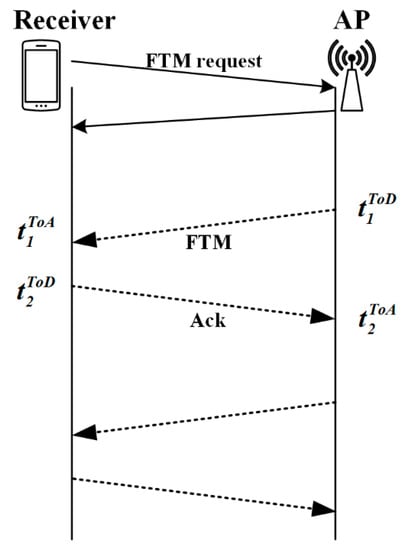
با توجه به اینکه سیستم عامل اندروید دارای RTT API می باشد، بنابراین گوشی هوشمند می تواند زمان پرواز سیگنال را بر اساس اندازه گیری RTT بدست آورد که به صورت زیر قابل محاسبه است:
جایی که تیمنToA (من=1، 2)و تیمنToD (من=1، 2)به ترتیب اندازه گیری ith ToA و ith ToD را نشان می دهد. تیoافزمان مبارزه سیگنال از AP به تلفن هوشمند است. تلفن هوشمند می تواند همزمان به چندین AP متصل شود و فواصل اندازه گیری شده را تا آنها بدست آورد.
سرعت امواج الکترومغناطیسی با سرعت نور برابر است. بنابراین، محدوده بین فرستنده و گوشی هوشمند با تخمین زده می شود تیoافو سرعت نور همانطور که در رابطه (2) نشان داده شده است.
جایی که جنشان دهنده سرعت نور و دrتیتیفاصله اندازه گیری است که بر اساس زمان پرواز و سرعت سیگنال محاسبه می شود.
3.2. الگوریتم حداقل مربع
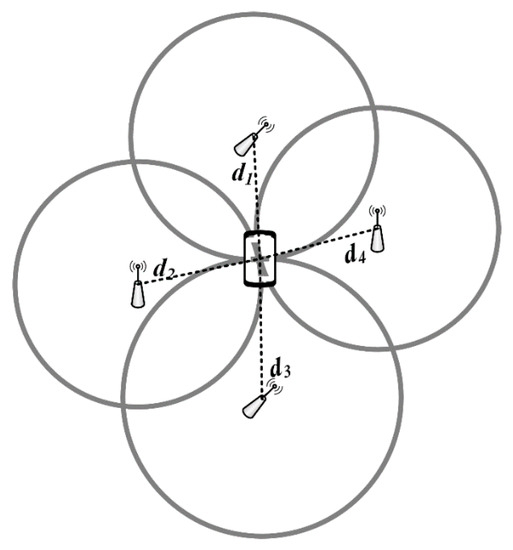
هنگامی که فواصل اندازه گیری بین چند فرستنده و تلفن هوشمند جمع آوری شد، معادله را می توان به صورت زیر ایجاد کرد. از هر فاصله اندازه گیری می توان برای تولید معادلات یک دایره استفاده کرد.
جایی که (ایکسمن، Yمن) {من=1، 2،⋯،n}و (ایکس، y)نشان دهنده موقعیت ith AP و گوشی هوشمند، به ترتیب، nتعداد AP است، و دمن {من=1، 2،⋯،n}فاصله اندازه گیری شده بین گوشی هوشمند و ith AP است. برای حل موقعیت نقطه تقاطع، معادله باید با کم کردن آخرین فرمول ساده شود و معادله ساده شده به صورت بیان شود.
معادله (4) را می توان با شکل ساده تری بیان کرد، همانطور که در رابطه (5) نشان داده شده است.
جایی که آو ببه ترتیب n -1 در 2 ماتریس و n -1 بردار ستون بعدی هستند وایکسموقعیت تخمینی است که می تواند به صورت نشان داده شود [ایکس، y]تی. ماتریکس آو بردار برا می توان با رابطه (6) نشان داد.
در نهایت، نتیجه موقعیت یابی بر اساس الگوریتم LS را می توان به صورت بیان کرد
4. روش شناسایی NLOS و LOS
4.1. سناریو، NLOS و تعریف LOS
4.2. روش شناسایی NLOS و LOS بر اساس تشخیص سناریو
این مقاله از GPR برای ساخت یک مدل تشخیص سناریو استفاده میکند که هدف آن شناسایی سیگنالهای NLOS و LOS است. مزیت مهم روش تشخیص سناریو بر اساس GPR عدم نیاز به جمع آوری داده های آموزشی است. در این مقاله از موقعیت APها برای بدست آوردن موقعیت برخی از نقاط مربوط به سناریوهای مختلف و محاسبه فاصله واقعی بین آنها و APها استفاده می کنیم و این فواصل واقعی به عنوان داده های ورودی آموزش GPR در نظر گرفته می شود که می توان آن را بیان کرد. مانند ایکس{ایکس1، ایکس2،⋯،ایکساس}، و شاخص های سناریوی مربوطه، داده های خروجی برای آموزش هستند که می توانند به صورت بیان شوند Y{y1، y2،⋯،yاس}. بین داده های ورودی و خروجی باید نقشه ای به شرح زیر وجود داشته باشد:
جایی که γنویز گاوسی با میانگین و واریانس صفر است، δ2، یعنی γ~ن(0،δ2). استعداد داده های آموزشی را نشان می دهد.
GPR یک مدل ناپارامتریک است. هدف آن استفاده از فرآیند گاوسی قبل برای انجام تحلیل رگرسیون بر روی داده ها و ایجاد رابطه نگاشت برای تابع هدف است. در GPR، فرآیند گاوسی مجموعهای از متغیرهای تصادفی است که تابع توزیع گاوسی مشترک هستند، که توسط یک تابع میانگین و تابع کوواریانس تعیین میشود، همانطور که در رابطه (9) نشان داده شده است:
جایی که f(ایکس)نشان دهنده فرآیند گاوسی است، متر(ایکس)تابع میانگینی است که بدون از دست دادن کلیت، صفر دیده می شود، E(·)عملگر انتظار را نشان می دهد، ک(ایکس،ایکس)ماتریس کوواریانس است و ک(ایکسمن،ایکسj)تابع کوواریانس است.
تابع هسته در این کار در رابطه (13) که یک تابع هسته گاوسی است بیان شده است. فراپارامترها δfو لبه ترتیب محدوده انحراف استاندارد و مقیاس طول را نشان می دهد و ایکسمنمجموعه ای از فواصل واقعی بین نقطه ith و AP است. این مقاله فاصله اقلیدسی را برای محاسبه انتخاب کرد ک(ایکسمن،ایکسj)، که توسط “ایکسمن-ایکسj”.
شاخص سناریوی پیش بینی y∗و شاخص سناریوی آموزشی Yیک توزیع گاوسی چند متغیره را بطور مشترک به صورت زیر دنبال کنید:
جایی که ایکس∗و ایکسبه ترتیب داده های آزمون و داده های آموزشی هستند. توزیع پسین پ(y∗|Y)را می توان به صورت بیان کرد
4.3. محدودیت موقعیت بر اساس تشخیص سناریو
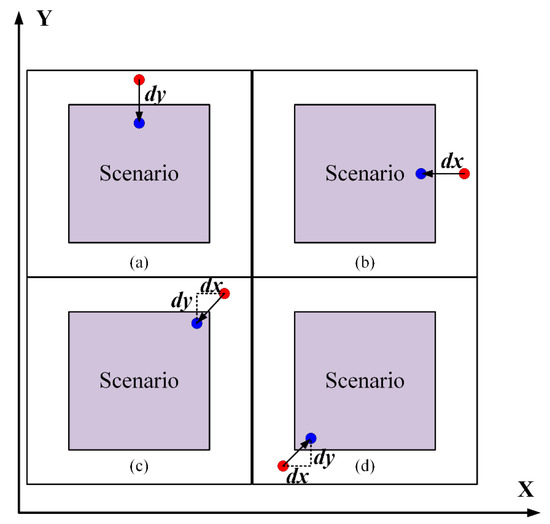
روش محدودیت موقعیت در رابطه (16) نشان داده شده است.
جایی که ( ایکسپ،yپ) موقعیت فراتر از سناریوی مکان را نشان می دهد، (مترمنnایکس، مترمنnY)و (مترآایکسایکس، مترآایکسY)به ترتیب حداکثر و حداقل موقعیت سناریوی موقعیت یابی و دایکسو دyمقادیر اصلاحی هستند که هر دو در این مقاله 0.2 متر هستند که ضخامت دیواره است.
5. الگوریتم محلی سازی داخلی
5.1. مدل کالیبراسیون برد برای فاصله LOS
این مقاله از برازش حداقل مربعات غیرخطی برای ایجاد مدل کالیبراسیون برد برای فاصله LOS استفاده کرد. به منظور ایجاد مدل کالیبراسیون محدوده، ابتدا یک تابع چند جمله ای غیرخطی ساختیم که نشان دهنده رابطه نگاشت بین خطای محدوده و فاصله اندازه گیری است، همانطور که در رابطه (17) نشان داده شده است. فاصله کالیبره شده باید مجموع خطای پیش بینی شده و فاصله اصلی باشد، همانطور که در رابطه (18) نشان داده شده است.
جایی که هو دrتیتیخطای محدوده و اندازه گیری دامنه هستند، [ج1، ج2،ج3،ج4]پارامترهای مدل ناشناخته هستند و دجفاصله کالیبره شده است.
هدف برازش حداقل مربعات غیرخطی یافتن گروهی از پارامترها است که می تواند مجموع مربعات باقیمانده مدل را با توجه به داده های شناخته شده به حداقل برساند. هو دrتیتی. حداقل مجموع مجذورهای باقیمانده را می توان با رابطه (19) ارائه کرد.
جایی که سمجموع مربع های باقیمانده را نشان می دهد، مترمنn(·)نشان دهنده حداقل مقدار و ماندازه داده های ورودی و خروجی است. راه حل پارامترهای مدل با برازش حداقل مربعات غیرخطی یک رویکرد تکراری است. پارامترهای مدل بهینه را می توان در فرآیند تکراری بی وقفه حل کرد.
5.2. الگوریتم محلی سازی داخلی بر اساس شناسایی LOS و کالیبراسیون محدوده
6. آزمایش کنید
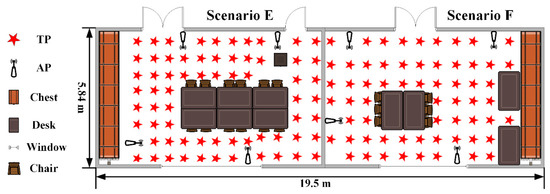
6.1. محیط تجربی
6.2. ساخت مدل کالیبراسیون محدوده
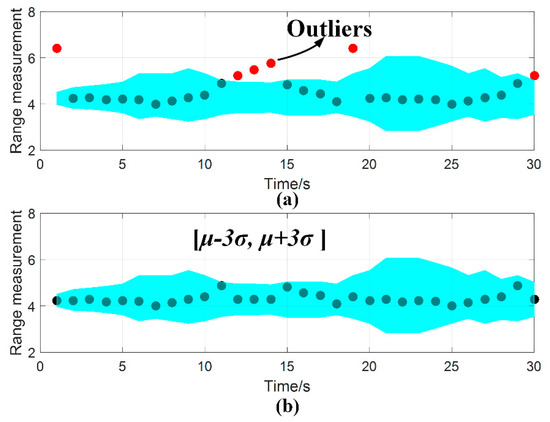
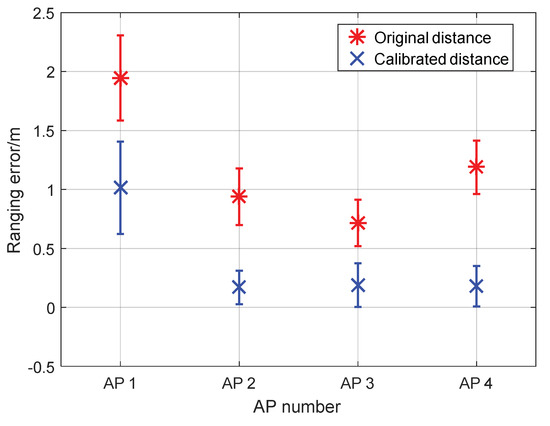
میانگین اندازه گیری های برد پردازش شده در هر فاصله به عنوان فاصله اندازه گیری نهایی در نظر گرفته شد که به عنوان داده های ورودی مدل در نظر گرفته شد. خطاهای دامنه با اندازه گیری فواصل و فاصله واقعی محاسبه و به عنوان داده های خروجی مدل مشاهده شد. سپس، برازش حداقل مربعات غیرخطی برای ایجاد رابطه نگاشت بین اندازهگیری دامنه و خطای محدوده، که راهحل بهینه پارامترهای مدل ارائهشده در رابطه (17) بود، استفاده شد. پارامترهای مدل [-0.0084، 0.0721، -0.0973، 1.0427] بودند، و مدل کالیبراسیون محدوده در این مقاله می تواند به صورت زیر بیان شود:
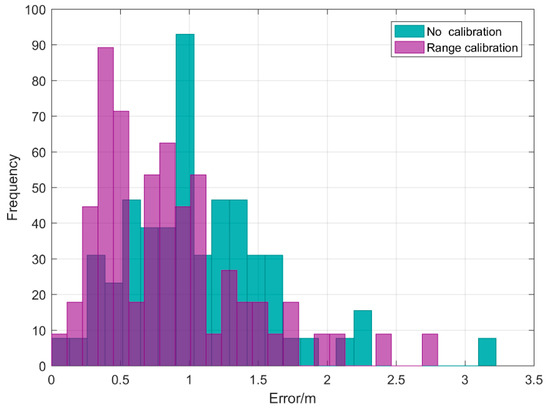
6.3. اثر مدل کالیبراسیون محدوده
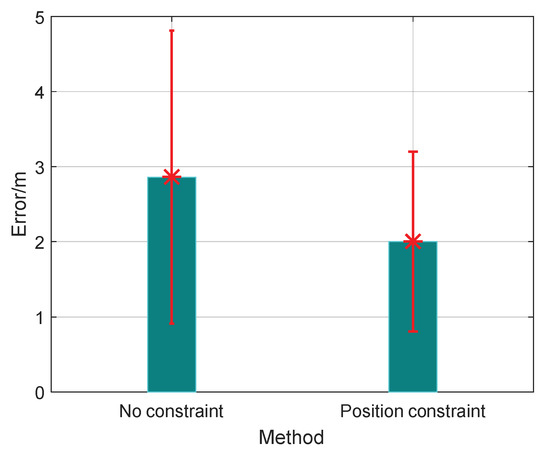
6.4. اثر محدودیت موقعیت
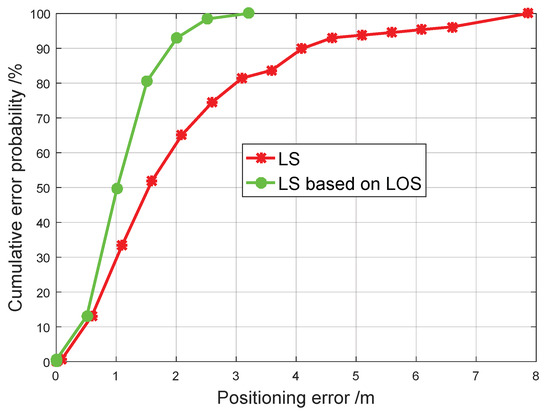
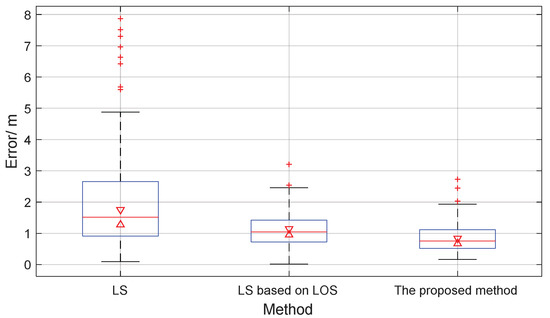
6.5. الگوریتم محلی سازی داخلی بر اساس شناسایی LOS و کالیبراسیون محدوده
7. نتیجه گیری
منابع
- محمود، ح. تریپاتی، ن. Tipdecho، T. سوئیچینگ بدون درز بین سیستم موقعیت یابی داخلی مبتنی بر GNSS و WLAN برای موقعیت یابی همه جا حاضر. علوم زمین آگاه کردن. 2014 ، 8 ، 221-231. [ Google Scholar ] [ CrossRef ]
- Olesen، DM ارزیابی عملکرد و بهبود موقعیت یابی GPS/BDS در فضای داخلی. Adv. Space Res. 2017 ، 59 ، 870-876. [ Google Scholar ]
- موسی، ع. Nugraha، GD; هان، اچ. چوی، دی. سئو، اس. Kim, J. یک روش تشخیص NLOS مبتنی بر درخت تصمیم برای بهبود دقت ردیابی مکان داخلی UWB. بین المللی J. Commun. سیستم 2019 , 32 . [ Google Scholar ] [ CrossRef ]
- یو، ک. ون، ک. لی، ی. ژانگ، اس. ژانگ، ک. یک الگوریتم جدید کاهش NLOS برای محلیسازی UWB در محیطهای سخت داخلی. IEEE Trans. وه تکنولوژی 2019 ، 68 ، 686-699. [ Google Scholar ] [ CrossRef ]
- چن، ال. پی، ال. کوسنیمی، اچ. چن، ی. کروگر، تی. Chen, R. Bayesian Fusion برای موقعیت یابی داخلی با استفاده از اثر انگشت بلوتوث. سیم. پارس اشتراک. 2013 ، 70 ، 1735-1745. [ Google Scholar ] [ CrossRef ]
- توپاک، اف. پکریکلی، MK; Tanyer، AM ارزیابی قابلیت زیست فناوری بلوتوث فناوری کم انرژی برای محلی سازی داخلی. جی. کامپیوتر. مدنی مهندس 2018 , 32 . [ Google Scholar ] [ CrossRef ]
- ژانگ، جی. لیو، ی. پاتون، جی. Periaswamy، SCG; Roppel, T. BFVP: الگوریتم محلی سازی تگ UHF RFID احتمالی با استفاده از فیلتر بیزی و مدل RFID توان متغیر. IEEE Trans. الکترون صنعتی 2018 ، 65 ، 8250–8259. [ Google Scholar ] [ CrossRef ]
- سان، دبلیو. ژو، ام. یو، اچ. تانگ، اچ. Lin, A. تقویت اثر انگشت برای محلی سازی WiFi داخلی بر اساس رگرسیون فرآیند گاوسی. IEEE Trans. وه تکنولوژی 2018 ، 67 ، 10896-10905. [ Google Scholar ] [ CrossRef ]
- آهنگ، X. فن، X. شیانگ، سی. بله، س. لیو، ال. وانگ، ز. او، X. یانگ، ن. Fang, G. چارچوب محلی سازی داخلی مبتنی بر شبکه عصبی کانولوشنال جدید با اثر انگشت WiFi. دسترسی IEEE 2019 ، 7 ، 110698–110709. [ Google Scholar ] [ CrossRef ]
- ژانگ، دی. یانگ، LT; حداقل، سی. ژائو، اس. گوو، ام. یین، زی. سیستم های مکان یابی بلادرنگ با استفاده از RFID فعال برای اینترنت اشیا. سیستم IEEE J. 2017 ، 10 ، 1226-1235. [ Google Scholar ] [ CrossRef ]
- خو، اچ. دینگ، ی. لی، پی. وانگ، آر. Li، Y. یک الگوریتم موقعیت یابی داخلی RFID بر اساس احتمال بیزی و K-نزدیکترین همسایه. Sensors 2017 ، 17 ، 1806. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- شیائو، آ. رویزی، سی. درن، ال. یوجین، سی. Dewen, W. یک سیستم موقعیت یابی داخلی بر اساس اشیاء ساکن در صحنه های داخلی بزرگ با استفاده از دوربین گوشی های هوشمند. Sensors 2018 , 18 , 2229. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- خیام، MO; نورالرحیم، م. لی، ایکس. ریتز، سی. Guan، YL; طراحی SS از شکلهای موج چیرپ برای موقعیتیابی آلتراسونیک با دسترسی چندگانه در فضای داخلی. IEEE Sens. J. 2018 , 18 , 6375–6390. [ Google Scholar ] [ CrossRef ]
- چن، جی. او، جی. پنگ، ا. ژنگ، ال. Shi, J. یک سیستم محلی سازی داخلی INS/WiFi بر اساس حداقل مربعات وزنی. Sensors 2018 , 18 , 1458. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- Rizos, C. یک روش حل ابهام عدد صحیح برای ادغام GPS/شبهدولیت/INS. جی. جئود. 2005 ، 79 ، 242-255. [ Google Scholar ]
- لی، ایکس. ژانگ، پی. هوانگ، جی. ژانگ، Q. ژائو، کیو. تجزیه و تحلیل عملکرد موقعیت یابی سودولیت داخلی بر اساس فیلتر کالمن بدون بو. راه حل GPS. 2019 ، 23 . [ Google Scholar ] [ CrossRef ]
- جون، اچ. روش کالیبراسیون دقیق موقعیتهای کاذب در سیستمهای ناوبری داخلی. محاسبه کنید. ریاضی. Appl. 2003 ، 46 ، 1711-1724. [ Google Scholar ]
- ممکن است.؛ دو، ز. جیانگ، کیو. Hou, Z. Basmag: یک سیستم محلی سازی مبتنی بر HMM بهینه شده با استفاده از الگوریتم تطبیق دنباله های عقب با بهره برداری از اطلاعات ژئومغناطیسی. IEEE Sens. J. 2016 , 16 , 7472–7482. [ Google Scholar ] [ CrossRef ]
- Zhou، Z. الگوریتم موقعیت یابی داخلی با استفاده از ارتباطات نور مرئی دیود ساطع کننده نور. انتخاب کنید مهندس 2012 ، 51 ، 5009. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- فیلوننکو، وی. کالن، سی. Carswell, J. بررسی موقعیت یابی اولتراسونیک در تلفن های همراه. در مجموعه مقالات کنفرانس بین المللی 2010 در مورد موقعیت یابی داخلی و ناوبری داخلی، زوریخ، سوئیس، 15 تا 17 سپتامبر 2010. [ Google Scholar ]
- Tan, KG Objects ردیابی در یک محیط خواننده متراکم با استفاده از شبکه های موقعیت یابی آنتن RFID. بین المللی جی. الکترون. 2009 ، 96 ، 1281-1307. [ Google Scholar ]
- پترسون، GD سیستم های موقعیت یابی UWB با دقت زیر میلی متری سنجش فشاری: رویکرد فضا-زمان. رقم. فرآیند سیگنال 2013 ، 23 ، 340-354. [ Google Scholar ]
- Han, SK یک سیستم موقعیت یابی ارتباط نور مرئی داخلی با استفاده از تکنیک تخصیص حامل RF. J. Lightwave Technol. 2013 ، 31 ، 134-144. [ Google Scholar ]
- الگوریتم محلیسازی نسبی شبهدولیت داخلی لیو، YQ با فیلتر کالمن. Acta Phys. گناه 2014 ، 63 ، 228402. [ Google Scholar ]
- هو، سی سی; Lee, R. سیستم موقعیت یابی داخلی در زمان واقعی بر اساس تخمین موقعیت مکانی دوتایی هرون RFID و تخمین مکان اینرسی-ناوبری IMU. در مجموعه مقالات سی و نهمین کنفرانس سالانه نرم افزار و برنامه های کامپیوتری IEEE 2015، تایچونگ، تایوان، 1 تا 5 ژوئیه 2015؛ ص 481-486. [ Google Scholar ]
- لیو، دی. تحقیق در مورد الگوریتم ترکیبی فیلتر کالمن و فیلتر ذرات در موقعیتیابی فیوژن IMU و UWB. اوباش Inf. سیستم 2018 , 2018 . [ Google Scholar ] [ CrossRef ]
- Schmalstieg, D. موقعیت یابی و ناوبری داخل ساختمان با دوربین تلفن. محاسبات فراگیر IEEE 2009 ، 8 ، 22-31. [ Google Scholar ]
- استریگل، الف. برآورد نزدیکی چهره به چهره با استفاده از بلوتوث در تلفن های هوشمند. IEEE Trans. اوباش محاسبه کنید. 2014 ، 13 ، 811-823. [ Google Scholar ]
- گائو، ی. الگوریتم فیلتر ذرات بهبود یافته برای موقعیت یابی ژئومغناطیسی داخلی. J. Sens. 2018 ، 2018 ، 1–9. [ Google Scholar ]
- ژوانگ، ی. سید، ز. لی، ی. El-Sheimy، N. ارزیابی دو سیستم موقعیتیابی WiFi بر اساس جمعسپاری خودکار دستگاههای دستی برای ناوبری داخلی. IEEE Trans. اوباش محاسبه کنید. 2016 ، 15 ، 1982-1995. [ Google Scholar ] [ CrossRef ]
- وانگ، پی. Luo, Y. تحقیق در مورد الگوریتم مکان داخلی WiFi بر اساس محدوده RSSI. در مجموعه مقالات چهارمین کنفرانس بینالمللی علوم اطلاعات و مهندسی کنترل (ICISCE) در سال 2017، چانگشا، چین، 21 تا 23 ژوئیه 2017؛ صفحات 1694-1698. [ Google Scholar ]
- زی، ی. وانگ، ی. نالاناتان، ا. وانگ، ال. یک روش محلیسازی داخلی K-نزدیکترین همسایه بهبودیافته بر اساس فاصله اسپیرمن. فرآیند سیگنال IEEE Lett. 2016 ، 23 ، 351-355. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کارلسون، اف. کارلسون، ام. برنهاردسون، بی. توفسون، اف. Persson، M. Sensor با استفاده از اندازهگیری سیگنال WiFi دو باند، موقعیتیابی داخلی را ترکیب کرد. در مجموعه مقالات کنفرانس کنترل اروپا 2015 (ECC)، لینز، آسترالیا، 15 تا 17 ژوئیه 2015؛ صفحات 1669-1672. [ Google Scholar ]
- یو، اف. جیانگ، م. لیانگ، جی. Qin، X. هو، م. پنگ، تی. Hu, X. گسترش بومی سازی فضای داخلی مبتنی بر RSS با استفاده از سیگنال WiFi 5G. در مجموعه مقالات کنفرانس بین المللی 2014 در زمینه هوش محاسباتی و شبکه های ارتباطی، بوپال، هند، 14 تا 16 نوامبر 2014. ص 510-514. [ Google Scholar ]
- Tewolde، GS; Kwon, J. محلی سازی کارآمد وای فای در فضای داخلی با استفاده از بهینه سازی ازدحام ذرات. در مجموعه مقالات پیشرفت در هوش ازدحام، چونگ کینگ، چین، 12-15 ژوئن 2011 . Springer: برلین/هایدلبرگ، آلمان، 2011; ص 203-211. [ Google Scholar ]
- وو، جی. Tseng، P. یک روش موقعیت یابی داخلی مبتنی بر شبکه عصبی عمیق با استفاده از اطلاعات وضعیت کانال. در مجموعه مقالات کنفرانس بین المللی محاسبات، شبکه و ارتباطات 2018 (ICNC)، مائوئی، HI، ایالات متحده آمریکا، 5 تا 8 مارس 2018؛ ص 290-294. [ Google Scholar ]
- لیو، دبلیو. چنگ، کیو. دنگ، ز. چن، اچ. فو، ایکس. ژنگ، ایکس. ژنگ، اس. چن، سی. وانگ، اس. بررسی سیستم های موقعیت یابی داخلی مبتنی بر CSI و پیشرفت های اخیر. در مجموعه مقالات کنفرانس بین المللی 2019 موقعیت یابی داخلی و ناوبری داخلی (IPIN)، پیزا، ایتالیا، 30 سپتامبر تا 3 اکتبر 2019؛ صص 1-8. [ Google Scholar ]
- ژانگ، ی. لی، دی. Wang, Y. روش موقعیتیابی غیرفعال داخلی با استفاده از اثر انگشت CSI بر اساس Adaboost. IEEE Sens. J. 2019 ، 19 ، 5792–5800. [ Google Scholar ] [ CrossRef ]
- Karegar, PA بیسیم انگشتنگاری موقعیتیابی داخلی با استفاده از روشهای خوشهبندی انتشار میل. سیم. شبکه 2018 ، 24 ، 2825-2833. [ Google Scholar ] [ CrossRef ]
- آمیزور، ی. شاتزبرگ، U. Banin، L. نسل بعدی سیستم موقعیت یابی داخلی بر اساس زمان پرواز WiFi. در مجموعه مقالات بیست و ششمین نشست فنی بینالمللی بخش ماهواره مؤسسه ناوبری (ION GNSS+ 2013)، نشویل، TN، ایالات متحده آمریکا، 16 تا 20 سپتامبر 2013. [Google Scholar ]
- بنین، ال. شاتزبرگ، U. Amizur، Y. WiFi FTM و Map Information Fusion برای موقعیت یابی دقیق. در مجموعه مقالات کنفرانس بین المللی 2016 در موقعیت یابی داخلی و ناوبری داخلی (IPIN)، آلکالا د هنارس، اسپانیا، 4 تا 7 اکتبر 2016. [ Google Scholar ]
- وانگ، ک. نیرمالاتاس، ا. لیم، سی. علامه، ک. لی، اچ. Skafidas, E. سیستم محلی سازی بی سیم نوری مادون قرمز داخلی با قابلیت تخمین توان نور پس زمینه. انتخاب کنید Express 2017 , 25 , 22923–22931. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- گوا، جی. چن، آر. بله، اف. پنگ، ایکس. لیو، ز. Pan, Y. محلیسازی گوشیهای هوشمند داخلی: یک رویکرد دامنهدار وایفای ترکیبی RTT-RSS. دسترسی IEEE 2019 ، 7 ، 176767–176781. [ Google Scholar ] [ CrossRef ]
- ابراهیم، م. لیو، اچ. جواهر، ع. نگوین، وی. گروتسر، م. هوارد، آر. یو، بی. بای، اف. تأیید: ارزیابی دقت اندازهگیریهای زمان دقیق WiFi در یک پلتفرم باز. در مجموعه مقالات بیست و چهارمین کنفرانس بین المللی سالانه محاسبات و شبکه های سیار، دهلی نو، هند، 29 تا 31 اکتبر 2018؛ صص 417-427. [ Google Scholar ]
- هاشم، ا. یوسف، م. Harras, KA WiNar: محلیسازی زیر متری داخلی مبتنی بر RTT با استفاده از دستگاههای تجاری. در مجموعه مقالات کنفرانس بین المللی IEEE 2020 در مورد محاسبات و ارتباطات فراگیر (PerCom)، آستین، TX، ایالات متحده، 23 تا 27 مارس 2020؛ صص 1-10. [ Google Scholar ]
- دوورسکی، ن. بار-شالوم، او. بنین، ال. Amizur، Y. یک رویکرد یادگیری ماشینی برای محدوده RTT Wi-Fi. در مجموعه مقالات نشست فنی بین المللی موسسه ناوبری ION ITM 2019، Reston، VA، ایالات متحده آمریکا، 28 تا 31 ژانویه 2019. [ Google Scholar ]
- جنتنر، سی. اولمشنایدر، ام. کوئنر، آی. Dammann, A. WiFi-RTT Positioning Indoor. در مجموعه مقالات سمپوزیوم IEEE/ION 2020 Position, Location and Navigation Symposium (PLANS)، پورتلند، OR، ایالات متحده آمریکا، 20-23 آوریل 2020؛ ص 1029–1035. [ Google Scholar ]
- یو، ی. چن، آر. چن، ال. گوا، جی. بله، اف. Liu, Z. یک الگوریتم محاسبه مرده قوی بر اساس Wi-Fi FTM و حسگرهای متعدد. Remote Sens. 2019 , 11 , 504. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هان، ک. یو، اس ام; کیم، اس. محلیسازی فضای داخلی مبتنی بر تلفن هوشمند با استفاده از اندازهگیری زمانبندی دقیق Wi-Fi. در مجموعه مقالات کنفرانس بین المللی 2019 موقعیت یابی داخلی و ناوبری داخلی (IPIN)، پیزا، ایتالیا، 30 سپتامبر تا 3 اکتبر 2019؛ صص 1-5. [ Google Scholar ]
- پیش نویس استاندارد IEEE برای فناوری اطلاعات – ارتباطات و تبادل اطلاعات بین سیستمهای شبکههای محلی و شهری – الزامات خاص بخش 11: مشخصات کنترل دسترسی متوسط LAN بیسیم (MAC) و لایه فیزیکی (PHY). در IEEE P802.11-REVmc/D2.0، اکتبر 2013 ؛ IEEE: نیویورک، نیویورک، ایالات متحده آمریکا، 2013؛ صص 1–3237.
- شارپ، آی. Yu, K. الگوریتم موقعیت یابی حداقل مربعات پیشرفته برای موقعیت یابی داخلی. IEEE Trans. اوباش محاسبه کنید. 2013 ، 12 ، 1640-1650. [ Google Scholar ] [ CrossRef ]
- لی، ال. شی، ج. کانگ، ی. دوان، جی. Sun، P. یک تحقیق موقعیت یابی داخلی بر اساس روش حداقل مربعات مونت کارلو. در مجموعه مقالات موقعیت یابی همه جا حاضر، ناوبری داخلی و خدمات مبتنی بر مکان 2018 (UPINLBS)، ووهان، چین، 22 تا 23 مارس 2018؛ صص 1-6. [ Google Scholar ]


بدون دیدگاه