

خلاصه
این کار مجموعه ابزارهایی را توصیف میکند که در چارچوب پروژه H2020 مشاهده و نظارت بر تهدیدات زیرساختهای راهآهن (MOMIT) توسعه یافته، آزمایش شده و تولید شدهاند. این پروژه که در سال 2019 به پایان رسید، با هدف نشان دادن اینکه چگونه استفاده از تکنیکهای مختلف سنجش از دور میتواند به بهبود نظارت بر زیرساختهای راهآهن مانند خطوط یا پلها و در نتیجه، بهبود تشخیص ناپایداریهای زمین و تسهیل مدیریت آنها کمک کند. . چندین خط کار توسط MOMIT باز شد، اما نویسندگان این کار تلاش خود را در طراحی ابزارهایی برای کمک به تشخیص و شناسایی حرکات زمین با استفاده از دادههای تداخل سنجی رادار دیافراگم مصنوعی (InSAR) متمرکز کردند. خروجی اصلی این فعالیت مجموعهای از ابزارها بود که میتوانستند مناطقی را که دارای برچسب مناطق تغییر شکل فعال (ADA) هستند، با بالاترین نرخ تغییر شکل شناسایی کرده و آنها را به یک فرآیند زمینشناسی یا انسانزایی متصل کند. ADAtools نامی است که به مجموعه ابزارهای فوق الذکر داده شده است. شرح این ابزارها شامل تعریف اهداف، ورودی ها و خروجی های آنها و همچنین جزئیات نحوه بررسی صحت برنامه ها و معیارهایی است که عملکرد آنها را نشان می دهد. ADAtools شامل برنامه های زیر است: ADAfinder، los2hv، ADAclassifier و THEXfinder. مجموعه ابزار برای تجزیه و تحلیل و تفسیر نتایج InSAR هدف گذاری شده است. اطلاعات جانبی از فرآیند تفسیر و طبقه بندی نیمه خودکار پشتیبانی می کند.
کلید واژه ها:
ابزار نرم افزاری ؛ اتوماسیون فرآیند ؛ تجزیه و تحلیل تغییر شکل زمین ; طبقه بندی تغییر شکل زمین ; InSAR
1. معرفی
پروژه مشاهده و پایش چند مقیاسی تهدیدات زیرساخت راه آهن (MOMIT) (نگاه کنید به [ 1] برای جزئیات) با هدف توسعه و نشان دادن استفاده جدیدی از تکنیک های سنجش از دور برای نظارت بر زیرساخت های راه آهن است. هدف راه حل های MOMIT پشتیبانی از فرآیندهای نگهداری و پیشگیری در چرخه حیات مدیریت زیرساخت است. مفهوم کلی زیربنای MOMIT، نشان دادن مزایایی است که دادههای رصد زمین و سنجش از دور برای نظارت بر شبکههای راهآهن هم از نظر زیرساخت و هم از نظر محیط اطراف، که در آن فعالیتها و پدیدههای تأثیرگذار بر زیرساختها وجود دارد، به ارمغان میآورد. MOMIT از تکنیکهای پیشرفته در زمینههای سنجش از دور مبتنی بر فضا و سیستمهای هواپیمای خلبانی از راه دور (RPAS) برای انجام انواع مختلف تجزیه و تحلیل به لطف طیف گستردهای از حسگرهایی که ممکن است به آنها مجهز شوند، استفاده میکند.
برای دستیابی به اهداف خود، شش نمایشگر که نشان میدهند چگونه این دادهها و تکنیکها ممکن است به چنین اهدافی کمک کنند، ساخته شدهاند، یعنی:
-
حرکات زمینی در نزدیکی زیرساخت.
-
فعالیت های هیدرولیک در نزدیکی مسیرها.
-
نظارت جهانی برای مخاطرات طبیعی
-
نظارت بر سیستم الکتریکی
-
نظارت بر سازه های مهندسی عمران
-
نظارت بر ایمنی
بخش ژئوماتیک مرکز فناوری مخابرات کاتالونیا (CTTC) ساخت برخی از اجزای ادغام اولین نمایشگر را بر عهده گرفت که اهداف آن در [ 1 ] به تفصیل آمده است. دانشگاه آلیکانته (UA) عمدتاً روش مورد استفاده در اولین نمایشگر را تعریف کرد، از CTTC در تنظیم نرم افزار پشتیبانی کرد و ابزارهای توسعه یافته در چندین مطالعه موردی را به کار برد. بیشترین هدف مرتبط با کار ارائه شده در اینجا، معرفی ADAtools، مجموعه ای از اجزای نرم افزاری است که با هدف شناسایی و تفسیر مناطق تغییر شکل فعال (ADA) با استفاده از نقشه های جابجایی ایجاد شده با استفاده از روش تداخل سنجی پراکنده پایدار (PSI) می باشد.
چندین رویکرد PSI در بیست سال گذشته توسعه یافته است. بررسی آنها در [ 2 ] ارائه شده است. مفهوم اصلی پشت تکنیکهای PSI جمعآوری مجموعهای از چندین تصویر رادار دیافراگم مصنوعی (SAR) برای یک منطقه، با زوایای اکتساب بسیار مشابه است. این تصاویر بعداً برای شناسایی به اصطلاح پراکندههای پایدار (PS) پردازش میشوند که ساختارهای مصنوعی و طبیعی هستند که انسجام تداخل سنجی را در طول زمان نشان میدهند. از طریق پردازش پیشرفته داده، می توان سری زمانی جابجایی (TS) PS شناسایی شده را تعیین کرد. نتایج PSI برای چندین کاربرد در مقیاس های کاری مختلف، از پردازش گسترده در سطح ملی استفاده شده است [ 3 ، 4 ]] به نظارت بر زیرساخت های واحد [ 5 ، 6 ، 7 ]. PSI به طور گسترده ای به عنوان ابزاری قابل اعتماد برای اندازه گیری دقیق انواع مخاطرات زمینی، از جمله رانش زمین [ 8 ، 9 ، 10 ]، فرونشست طبیعی و انسانی [ 11 ، 12 ، 13 ]، فروچاله ها [ 14 ، 15 ، 16 ]، زمین لرزه پذیرفته شده است. [ 17 ، 18 ، 19 ] و آتشفشان ها [ 20 ، 21 ، 22]. امروزه، افزایش تعداد برنامه های کاربردی PSI و تمایل به پردازش مناطق وسیع با میلیون ها نقطه اندازه گیری، نیازمند تعریف ابزارهای نیمه اتوماتیک و خودکار قابل اعتماد برای سهولت تجزیه و تحلیل و تفسیر نتایج PSI است [ 23 ، 24 ].
این مقاله به طور عمیق مجموعهای از ابزارها را برای تجزیه و تحلیل دادههای PSI و تفسیر توسعهیافته در CTTC، به اصطلاح ADAtools، توصیف میکند. این بسته از 4 ماژول تشکیل شده است، یعنی ADAfinder، ADAclassifier، THEXfinder و los2hv [ 25]. هدف اصلی چنین کاربردهایی استخراج نیمه خودکار و تفسیر اولیه مناطق تحت تأثیر تغییر شکل شناسایی شده توسط تکنیک PSI است. هدف، به روز رسانی و ارزیابی فعالیت پدیده های مرتبط با خطرات زمین (فعالیت آتشفشانی، رانش زمین، یا فرونشست زمین، در میان سایر پدیده ها) یا فعالیت های انسانی در یک منطقه معین است. اولین مورد، ADAfinder، ابزاری است که به تشخیص ADA اختصاص یافته است که از نقشه جابجایی مشتق شده از PSI استخراج شده است. ADAclassifier و THEXfinder یک قدم فراتر از ADAfinder می روند و سعی می کنند نوع فرآیند تغییر شکلی را که توسط ADA انجام می شود طبقه بندی کنند و سعی دارند به این سوال پاسخ دهند: آیا فرآیند تغییر شکل شناسایی شده یک لغزش زمین، یک فروچاله یا چیز دیگری است؟ سرانجام، los2hv مولفه های افقی و عمودی شرق-غرب حرکت اندازه گیری شده در امتداد خط دید ماهواره (LOS) را محاسبه می کند. مولفه افقی شرقی-غربی حرکت نیز یکی از ورودی های ADAclassifier است.
در نهایت، اما نه کمتر، شایان ذکر است که اگرچه توسعه این ابزارها با انگیزه نیازهای پروژه MOMIT بوده است، اما کاربردهایی که در بخشهای بعدی توضیح داده میشوند به این هدف محدود نمیشوند. برعکس، اینها ممکن است برای ردیابی فرآیندهای تغییر شکلی که در هر جایی اتفاق میافتد استفاده شوند، همانطور که در موارد استفاده واقعی پیشنهاد شده در بخش 7 نشان داده شده است .
2. ابزارهای ADA
چهار ابزار ارائه شده در این مقاله بر متدولوژی های از قبل موجود متکی هستند، به عنوان مثال، این برنامه ها مجموعه ای از رویه هایی را که قبلاً وجود داشته و به صورت دستی، گام به گام، با استفاده از ابزارهای سیستم اطلاعات جغرافیایی (GIS) اجرا شده اند، خودکار کرده اند.
در مورد ADAfinder، روش انجام شناسایی و ارزیابی ADA در [ 26 و 27 ارائه شده است.] به ترتیب در سال 2017 و 2019. در این آثار، نویسندگان به طور مفصل روش شناسایی مناطق تغییر شکل فعال و ارزیابی کیفیت آنها را توضیح می دهند. ورودی مجموعه ای از پراکنده کننده های پایدار (PS؛ یا “نقاط”) است که منطقه مورد تجزیه و تحلیل را پوشش می دهد. سپس هر ADA بر اساس مکان و چگالی PS، بسته به برخی آستانه ها به عنوان حداقل تعداد نقاط ایجاد کننده یک ADA یا ناحیه نفوذ هر PS، تعریف می شود. یک شاخص کیفیت توصیف کننده سطح نویز و ثبات سری زمانی جابجایی PS که هر ADA را تشکیل می دهد نیز محاسبه می شود. مفهوم ADA برای تخمین خطرات مرتبط با خطرات زمین (عمدتا رانش زمین) در محیط های مختلف اروپایی مورد استفاده قرار گرفته است (نگاه کنید به [ 28 ، 29 ، 30 ]]). شایان ذکر است که استخراج ADA بر محدودیت های ذاتی تکنیک PSI غلبه نمی کند: ADAfinder آنچه را که تکنیک PSI می تواند تشخیص دهد استخراج می کند. به عنوان مثال، عدم وجود ADA لزوماً به معنای عدم تغییر شکل نیست. این می تواند عدم وجود تغییر شکل و همچنین یک حرکت غیرقابل تشخیص به دلیل هندسه نامطلوب [ 31 ] یا عدم وجود اطلاعات برای انسجام کم (منطقه پر سر و صدا) باشد.
ADAclassifier و THEXfinder بر متدولوژی توسعه یافته توسط UA تکیه می کنند که تحت تحقیق مداوم است. اگرچه به اندازه کافی بالغ است که خودکار شود، که فرآیند آزمایش را آسان می کند و به بهبود خود روش کمک می کند. وظیفه ADAclassifier و THEXfinder شناسایی نوع فرآیند زمین شناسی یا انسان زایی است که باعث حضور ADA می شود. تا شش پدیده مختلف (به بخش 2.2 مراجعه کنید ) برای به دست آوردن تخمینی از علل ایجاد تغییر شکل زمین بررسی می شود. اینها رانش زمین، فروچاله ها، فرونشست، سکونتگاه های سازنده، خاک های گسترده و پدیده های حرارتی هستند. ADAclassifier از چهار مورد اول مراقبت می کند، در حالی که THEXfinder مسئول دو مورد آخر است. برای جزئیات بیشتر در مورد روش شناسی که این دو ابزار بر آن تکیه دارند، رجوع کنید به [ 32].
در نهایت، los2hv مؤلفه های افقی و عمودی شرق-غرب جابجایی زمین را که با PSI در امتداد LOS ماهواره اندازه گیری می شود، محاسبه می کند (مولفه افقی یکی از ورودی های مورد نیاز ADAclassifier است). los2hv برای به دست آوردن یک نتیجه متوسط برای هر یک از کاشیهای بهدستآمده، مجموعهای از ناحیه مورد نظر را انجام میدهد. چنین رویکردی به این معنی است که غلبه بر الزام سختگیرانه مبنی بر اینکه داده های مدارهای صعودی و نزولی برای انجام چنین تجزیه حرکت ضروری هستند. در نظر گرفتن PS در یک کاشی به عنوان یک نقطه درشت تر، به دست آوردن یک مقدار متوسط اما همچنان مفید برای اهداف ADAclassifier امکان پذیر است. بخش 2.3 و [ 32 را ببینید] برای توضیح دقیق این ابزار. همانطور که در بالا گفته شد، رویه های فوق معمولاً بر استفاده زیاد از ابزارهای GIS و تخصص اپراتور متکی است. تعداد مراحلی که این رویهها شامل آنها میشود باعث میشود آنها فرآیندهایی زمانبر و مستعد خطا داشته باشند که مستلزم نیاز به پرسنل واجد شرایط است.
اهداف بسته ADAtools عبارتند از: (1) خودکارسازی رویههای مربوطه و محدود کردن خطاهای انسانی غیرضروری. (2) کاهش زمان مورد نیاز برای شناسایی و پیش طبقهبندی ADA، در نتیجه راه را برای بهروزرسانیها و تحلیلهای مکرر باز میکند. و (3) برای کاهش تخصص مورد نیاز برای به دست آوردن چنین نتایج، امکان ادغام فرآیند در یک گردش کار تولید نیمه خودکار، در صورت لزوم.
2.1. ADAfinder
این نرم افزار، بر اساس روش توضیح داده شده در [ 26 ]، برای شناسایی مناطق اصلی که در آن جابجایی توسط پردازش PSI اندازه گیری شده است، فشرده کردن اطلاعات موجود در نقشه تغییر شکل ورودی و ارزیابی کیفیت اطلاعات سری زمانی استفاده می شود. یعنی نویز مکانی-زمانی) هر ADA. علاوه بر این، ADAfinder دارای گزینه ای برای فیلتر کردن نقشه جابجایی ورودی از PS جدا شده یا بالقوه است. ما برای جزئیات بیشتر در مورد ارزیابی کیفیت و روشهای فیلتر بیرونی به [ 26 ] مراجعه میکنیم. این ابزار اجازه می دهد تا میزان مدیریت داده ها از نظر فضای سخت افزاری و زمان محاسباتی کاهش یابد.
به عنوان ورودی، ADAfinder به موارد زیر نیاز دارد:
-
یک شکل فایل ESRI حاوی PS که توسط الگوریتم تشخیص استفاده خواهد شد. علاوه بر مختصات آنها، ADAfinder به برخی ویژگی ها برای تعریف PS نیاز دارد. سرعت متوسط آنها بر حسب میلیمتر در سال، و سریهای زمانی تغییر شکل که حرکات انجام شده توسط آنها را اندازهگیری میکند، بیان میشود.
-
به صورت اختیاری، کاربر می تواند یک چند ضلعی برای تغییر اندازه ناحیه مورد نظر آپلود کند. تمام PS در شکل فایل ورودی زمانی در نظر گرفته می شوند که چنین چند ضلعی ارائه نشده باشد.
-
مجموعه ای از پارامترهای تعریف شده توسط روش توصیف شده در [ 26 ] ( شکل 1 ).
خروجی ها دو شکل فایل ESRI هستند که اولی حاوی چند ضلعی است که مرزهای ADA را مشخص می کند. دوم شامل مجموعه ای از PS فیلتر شده. برای آنچه که مربوط به خروجی PS است، ADAfinder امکان انتخاب بین دو گزینه مختلف را بسته به نیازهای کاربر فراهم می کند. خروجی می تواند شامل تمام PS های فیلتر شده منطقه مورد نظر یا فقط موارد موجود در ADA استخراج شده باشد.
شکل 1 نسخه رابط کاربری گرافیکی (GUI) ابزار ADAfinder را نشان می دهد. توجه داشته باشید که برخی از مقادیر ارائه شده توسط کاربر قبلاً تنظیم شده اند. دلیل آن این است که ابزار یک فایل گزینه های پیش فرض را بارگیری می کند ( برای جزئیات در مورد فایل های گزینه ها به بخش 3.3 مراجعه کنید) که دو هدف را دنبال می کند: ارائه نکاتی به کاربر در مورد مقادیر برخی از پارامترها و صرفه جویی در زمان صرف شده برای تایپ بسیاری از آنها هنگام کار در همان پروژه فایل گزینههای پیشفرض ممکن است توسط کاربر تغییر داده شود تا پیشفرضها را در هر زمان به تنظیمات برگزیده خود تنظیم کند. در نهایت، کاربر میتواند مجموعهای از گزینههای متفاوت از گزینههای موجود در پیشفرض را در یک فایل گزینههای جداگانه ذخیره کند که بعداً ممکن است به تعداد دفعات مورد نیاز بارگیری شود.
شایان ذکر است که شکل فایل ADA خروجی در میان ویژگیهای خود، نتایج ارزیابی کیفیت TS جابجایی PS را از نظر نویز مکانی و زمانی، بر اساس تحلیل آماری ساده TS در هر ADA، شامل میشود [ 3 ]. چنین ارزیابی با یک طبقه بندی چهار سطحی از قابلیت اطمینان TS از ADA استخراج شده نشان داده می شود، که در آن 1 به معنای “بسیار قابل اعتماد”، 2 به معنای “قابل اعتماد” است، اما تجزیه و تحلیل TS پیشنهاد شده است، 3 به معنای “نه چندان قابل اعتماد” است، به عنوان مثال، تجزیه و تحلیل عمیق تر از TS ضروری است، و 4 به معنای “غیر قابل اعتماد” است. شکل 2 مقداری ADA را نشان می دهد. رنگهای آنها چهار سطح ذکر شده را ترسیم میکنند.
برای توضیح دقیق ابزار ADAfinder، لطفاً به راهنمای کاربر آن [ 33 ] مراجعه کنید.
2.2. ADAclassifier و THEXfinder
این ابزارها سعی می کنند نوع(های) فرآیند(های) تغییر شکل(های) تغییر شکلی که توسط زمین انجام می شود را تعیین کنند.
تا شش نوع مختلف از پدیده های تغییر شکل شناسایی شده است. مواردی که توسط ADAclassifier مورد تجزیه و تحلیل قرار گرفته اند عبارتند از رانش زمین، فروچاله، فرونشست زمین، و سکونتگاه های سازنده یا تحکیم. THEXfinder از شناسایی فرآیندهای تغییر شکل ناشی از خاک های گسترده و اثرات دما مراقبت می کند. یک الگوریتم (یا روش فرعی) متفاوت برای هر یک از این موارد ابداع شده است. شکل 3 گردش کار الگوریتم های پیاده سازی شده توسط ADAclassifier برای شناسایی چهار پدیده فوق را نشان می دهد.
ADAclassifier و THEXfinder به تعداد قابل توجهی ورودی نیاز دارند. برای ADAclassifier اینها عبارتند از:
-
فایل های ADA و PS ایجاد شده توسط ADAfinder (به بخش 2.1 مراجعه کنید ). به بیان دقیق، این فایل ها نیازی به ایجاد توسط ADAfinder ندارند. هر ابزار یا فرآیند دستی دیگری که ADA را شناسایی می کند ممکن است به جای آن استفاده شود. با این حال، مجموعه ای از ویژگی های موجود در جدول ویژگی های shapefiles باید با ویژگی های مورد نیاز ADAclassifier مطابقت داشته باشد – ویژگی هایی که ADAfinder در خروجی خود گنجانده است.
-
یک مدل زمین دیجیتال (DTM)، برای محاسبه شیب ها.
-
مجموعه ای از نقشه های برداری چند ضلعی (موجودی از این پس،) به شکل فایل های شکل ESRI، برای بررسی اینکه آیا یک ADA قبلاً به عنوان متعلق به هر یک از چهار فرآیند تغییر شکل ذکر شده در بالا فهرست شده است. موجودی های مورد نیاز برای زمین لغزش ها، فروچاله ها، فرونشست زمین و زیرساخت ها هستند. یک نقشه زمین شناسی (نقشه برداری چندضلعی دیگر) نیز مورد نیاز است. در این مورد آخر، یک فایل نقشه خواندنی که نحوه ساختار موجودی را تعریف میکند نیز مورد نیاز است تا به ویژگیهایی اشاره کند که نوع خاک پوشانده شده توسط هر چند ضلعی در موجودی را نشان میدهد. برای توضیحات مفصل در مورد به اصطلاح فایل های نقشه خواندن، بخش 3.4 را ببینید .
-
یک شکل فایل ESRI (چند ضلعی) که مؤلفه افقی حرکت را برای منطقه مورد مطالعه ذخیره می کند. این خروجی los2hv است ( برای جزئیات به بخش 2.3 مراجعه کنید).
-
مجموعه پارامترها – معمولاً آستانه ها – مورد نیاز الگوریتم های مختلف مسئول فرآیندهای طبقه بندی باید ارائه شوند. نمونههایی از این پارامترها شیبها، ضرایب تعیین برای بیان اینکه آیا برخی از بررسیهای آماری مثبت هستند یا حداقل درصد همپوشانی یک ADA و چند ضلعیها در برخی از موجودی برای در نظر گرفتن اینکه آنها متقاطع هستند، هستند. این آستانه ها به صورت Th1 تا Th11 در شکل 3 ظاهر می شوند .
خروجی ADAclassifier یک فایل دیگر با ADA است که در آن جدول مشخصه به چهار فیلد اضافی اضافه شده است. هر یک از آنها احتمال تعلق ADA به فرآیند تغییر شکل مربوطه را بیان می کند. این به این دلیل است که همه الگوریتمهای تشخیص برای هر ADA اعمال میشوند. در نتیجه، و اگرچه میتوان آن را ناسازگار در نظر گرفت، برخی از ADA ممکن است در بیش از یک فرآیند تغییر شکل بهعنوان موارد مثبت طبقهبندی شوند. این به دلیل این واقعیت است که طبقهبندیکننده ADA در حال انجام محتملترین تحلیل علت است.
چهار سطح از قطعیت با این روش تعریف میشود: «یک X است»، «میتواند X باشد»، «X نیست» و «نمیتوان بررسی کرد آیا X است یا خیر»، جایی که «X» مخفف آن است. هر یک از چهار فرآیند تشخیص تغییر شکل اجرا شده توسط ADAclassifier. به عنوان مثال، هنگامی که در مورد زمین لغزش صحبت می شود، “it is a landslide” یکی از مقادیر ویژگی مربوطه خواهد بود.
توجه داشته باشید که یکی از چهار مقدار “نمیتواند بررسی کند که X است یا خیر”. این به این دلیل است که ADAclassifier ممکن است تصمیم بگیرد که یک یا چند مورد از چهار فرآیند تشخیص را به دلیل کمبود داده اعمال نکند. همانطور که در بالا ذکر شد، تعداد قابل توجهی ورودی مورد نیاز است. فقط فایل های موجودی در حال حاضر به پنج عدد می رسد. با در نظر گرفتن DTM و اجزای افقی حرکت، به راحتی می توان متوجه شد که در بسیاری از موارد مجموعه کامل فایل ها در دسترس نخواهد بود.
برای محدود کردن این مشکل رایج، ADAclassifier تقریباً هر فایل ورودی را اختیاری میکند (این شامل DTM، موجودیها و مؤلفههای افقی میشود). هر بار که برنامه اجرا میشود، وابستگیهای هر زیر الگوریتم را تجزیه و تحلیل میکند و تصمیم میگیرد که کدام یک از آنها میتواند به عنوان تابعی از ورودیهای ارائهشده توسط کاربر اجرا شود. در نتیجه، لازم است مقدار «نمیتوان بررسی کرد آیا X است» را به عنوان یکی از خروجیهای احتمالی هر فرآیند طبقهبندی اضافه کرد.
توجه داشته باشید که این رفتار ابزار را بسیار انعطافپذیرتر میکند: در حالی که تشخیص چهار فرآیند تغییر شکل را در یک برنامه متمرکز میکند، ممکن است تنها برای بررسی تنها یکی از اینها استفاده شود، فقط مجموعه دادههای موجود را برای فرآیند تغییر شکل هدف فراهم میکند.
شکل 4 و شکل 5 رابط کاربری گرافیکی ابزار ADAclassifier را نشان می دهد. اولی تب گزینه ها را نشان می دهد که در آن مجموعه آستانه های کنترل کننده برنامه تنظیم شده است. در مورد دوم، فهرست فایلهای (عمدتا اختیاری) ممکن است مورد قدردانی قرار گیرد.
همانطور که با ADAfinder (و همچنین با los2hv) اتفاق می افتد، ممکن است کاربر یک فایل گزینه های پیش فرض را برای بارگذاری مجموعه ای از مقادیر آستانه از پیش تعریف شده تنظیم کند. همچنین امکان ذخیره/بارگیری فایل های آپشن ایجاد شده توسط کاربر وجود دارد. ابزار ADAclassifier به طور کامل در راهنمای کاربر [ 34 ] توضیح داده شده است.
THEXfinder، دومین ابزار طبقهبندی، مانند ADAclassifier کار نمیکند. ADAclassifier خروجی ADAfinder را به عنوان ورودی می گیرد، یعنی با ADA که قبلاً شناسایی شده اند سروکار دارد. از اینجا شروع می شود، بررسی می کند که آیا این ADA با یک یا چند فرآیند تغییر شکل مطابقت دارند یا خیر.
برعکس، THEXfinder هر دو کار را انجام می دهد، یعنی: (الف) شناسایی خود ADA (در نتیجه ADAfinder را نادیده می گیرد). و بعداً (ب) انجام بررسی هایی که هدف آن طبقه بندی چنین ADA به عنوان خاک های گسترده یا اثرات حرارتی است.
در واقع، نسخه اول مجموعه ابزار، THEXfinder را به عنوان یک ابزار مجزا شامل نمی شد. در عوض، ADAclassifier مسئول تشخیص نه چهار پدیده فعلی، بلکه کل مجموعه شش پدیده تغییر شکل، از جمله دو موردی است که THEXfinder اکنون مسئول آن است. در دسترس بودن اولین نسخه ADAclassifier تلاش برای طبقهبندی ADA بسیار سریعتر را امکانپذیر کرد، بنابراین نتایج را آسانتر به دست آورد. به دلیل این فراوانی دادههای خروجی، مشخص شد که مکانیسم شناسایی ADA مورد استفاده توسط ADAfinder زمانی که پدیدههای ردیابی خاکهای گسترده یا اثرات حرارتی باشند، مناسب نبود. بنابراین، تشخیص این پدیده ها از ADAclassifier حذف شد و THEXfinder ایجاد شد. پیاده سازی مکانیزم تشخیص مناسب برای این نوع ADA همراه با خود الگوریتم های طبقه بندی. این بدان معنی است که THEXfinder ADA را در یک فرآیند واحد شناسایی و طبقه بندی می کند.
ورودی های THEXfinder به شرح زیر است:
-
مجموعه اصلی فایلهای PS و همچنین فایل نقشه خواندنی که ساختار فایل PSI را تعریف میکند (به بخش 3.4 مراجعه کنید ). توجه داشته باشید که در این مورد، ابزار از مجموعه داده های اصلی PSI شروع می شود، نه از ADA. بحث بالا را ببینید.
-
یک چند ضلعی اختیاری که ناحیه مورد نظر را تعریف می کند (شکل فایل).
-
شکل فایلهای اختیاری ESRI که زیرساختها (ساختمانها، پلها و غیره) و فهرستهای زمینشناسی را نشان میدهند. در مورد نقشه زمین شناسی، فایل خواندن نقشه اضافی نیز مورد نیاز است.
-
پارامترهای (آستانه) کنترل کننده رفتار برنامه.
حداکثر چهار فایل خروجی وجود دارد، دو فایل برای تجزیه و تحلیل خاک های گسترده و دو فایل دیگر برای مورد انبساط حرارتی. هر مجموعه شامل یک فایل با ADA و یک فایل دیگر با نقاط داخل این ADA است.
از نقطه نظر ساختاری، فایل های خروجی با ADA تقریباً مشابه فایل های ایجاد شده توسط ADAclassifier هستند. عملاً کل مجموعه صفات یکسان است. تنها تفاوت این است که ADAclassifier شامل مجموعه ای از چهار فیلد برای بیان احتمال مطابقت یک ADA با هر یک از فرآیندهای تغییر شکل آزمایش شده است، در حالی که فایل های ایجاد شده توسط THEXfinder فقط شامل یکی از این فیلدها در هر فایل هستند. این به این دلیل است که فایل های ADA ایجاد شده توسط THEXfinder تنها با یک فرآیند تغییر شکل منفرد مطابقت دارند.
در همان خطی که ADAclassifier، THEXfinder تنها زمانی که تمام فایلهای ورودی مورد نیاز برای انجام آن وجود دارد، سعی میکند بررسی کند که آیا یک ADA با فرآیند تغییر شکل مطابقت دارد یا خیر. به همین دلیل است که اکثر فایل های ورودی (و خروجی) اختیاری هستند و این ابزار را انعطاف پذیرتر می کند.
شکل 6 و شکل 7 رابط برنامه THEXfinder را نشان می دهد.
2.3. Los2hv
ابزار los2hv برای محاسبه اجزای افقی و عمودی مجزای شرقی-غربی جابجایی زمین که با PSI در امتداد LOS ماهواره اندازه گیری شده است، هدف قرار می گیرد. این مؤلفهها ورودیهایی هستند که ADAclassifier برای اجرای برخی از الگوریتمهای طبقهبندی که پیادهسازی میکند، مورد نیاز است. هر دو مجموعه داده صعودی و نزولی مورد نیاز است.
این ابزار به دلایل سازگاری، شکل فایل های ESRI را می پذیرد (ورودی) و (خروجی) را تولید می کند. در خروجی، los2hv دو فایل ایجاد می کند تا به ترتیب اجزای افقی و عمودی شرق-غرب حرکت را همانطور که در امتداد LOS مشاهده می شود ذخیره کند. باید روشن شود که جابجایی های شمال-جنوب محاسبه نمی شوند زیرا، به دلیل جهت تقریباً مدار شمال-جنوب ماهواره های SAR، InSAR به این جزء جابجایی حساس نیست [ 35 ]. قابل ذکر است که این محدودیت به جای ابزار los2hv با خود اطلاعات InSAR مرتبط است.
شکل 8 رابط کاربری گرافیکی los2hv را نشان می دهد. طبق معمول، مقادیر نشان داده شده از یک فایل گزینه های پیش فرض به دست می آیند. همچنین، کاربر ممکن است گزینه های خود را به راحتی ذخیره یا بارگذاری کند.
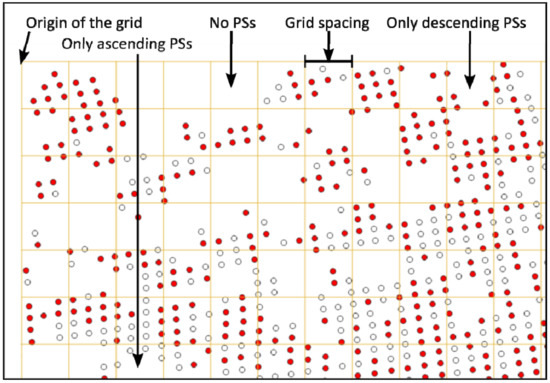
los2hv کل منطقه تحت پوشش PS موجود در دو فایل ورودی را انجام می دهد. اندازه Tesserae (فاصله شبکه) توسط کاربر تعیین می شود. در نتیجه، هر PS فقط به یکی از تسرای حاصل تعلق دارد.
ممکن است تسرایی وجود داشته باشد که در آنها: (1) هیچ PS وجود ندارد. (2) از فایل ورودی صعودی فقط PS وجود دارد. (3) فقط PS از فایل ورودی نزولی وجود دارد. و در نهایت (4) از هر دو فایل ورودی PS وجود دارد ( شکل 9 را ببینید ). برای آن تسراهای نوع (4)، حرکت زمین با استفاده از مقادیر تمام PS موجود در کاشی به طور میانگین محاسبه می شود. مقدار حاصل که در امتداد LOS اندازه گیری می شود، سپس طبق فرمول های شرح داده شده در [ 36 ] به مولفه های افقی و عمودی شرقی-غربی تبدیل می شود. مقدار مولفه های افقی و عمودی شرق-غرب حرکت زمین اکنون با کل منطقه تحت پوشش کاشی که نقاط درگیر در محاسبه قرار دارند مطابقت دارد.
این مقادیر در فایل های خروجی مربوطه ذخیره می شوند. توجه داشته باشید که کاربر ممکن است برای ذخیره نقاط (مرکز تسرا با داده) یا چند ضلعی (به طور دقیق تر، مربع ها، مرزهای تسرا) انتخاب کند. نوع دوم خروجی (مربع ها) همان خروجی است که توسط ADAclassifier استفاده می شود. خروجی مرکز برای هر هدف دیگری ارائه می شود.
لطفاً برای اطلاعات بیشتر به راهنمای کاربر کامل ابزار los2hv [ 37 ] مراجعه کنید.
3. پیاده سازی و ادغام
3.1. زبان انتخاب
مجموعه ابزار در C++ برای افزایش عملکرد پیاده سازی شده است. به عنوان مثال، ابزار ADAfinder هنگام کار با مجموعه داده های بزرگ ممکن است به مقدار معقولی از منابع نیاز داشته باشد ( برای جزئیات عملکرد کل مجموعه ابزار، بخش 5 را ببینید). بنابراین، استفاده از یک زبان کامپایل شده (نه تفسیر شده) اهمیت زیادی داشت. زبانهای محبوب دیگر، مانند پایتون، با وجود محبوبیت، دقیقاً به همین دلیل اجتناب شدهاند.
اگرچه با استفاده از کامپایلر C++ موجود در ویژوال استودیو مایکروسافت توسعه یافته است، اما اقدامات احتیاطی ویژه ای برای قابل حمل کردن کد منبع انجام شده است، به ویژه برای محبوب ترین کامپایلر C++ مورد استفاده در سیستم عامل لینوکس، gcc. استفاده از Qt (به زیر مراجعه کنید) نیز عاملی است که به قابل حمل بودن کد کمک می کند.
چندین کتابخانه منبع باز برای پیاده سازی مجموعه ابزار استفاده شد. اینها هستند:
-
Qt (نگاه کنید به [ 38 ]). اگرچه با چندین هدف مورد استفاده قرار گرفته است، اما هدف اصلی تضمین قابلیت حمل و نقل بود. از آنجایی که برنامه ها دارای رابط کاربری گرافیکی هستند، بسیار مهم است که چنین رابط کاربری گرافیکی با استفاده از یک کتابخانه قابل حمل ساخته شود تا از نیاز به نوشتن کدهای مختلف برای هر یک از پلتفرم هایی که این ابزارها در آنها هدف قرار می گیرند (حداقل ویندوز و لینوکس) اجتناب شود. Qt چارچوبی است که چنین قابلیت حمل را تضمین می کند. در واقع، توسعه برنامه های کاربردی چند پلتفرمی شعار آن است.
-
Shapelib. این کتابخانه ابزار بسیار مناسبی برای خواندن و نوشتن فایل های شکل ESRI است. برای جزئیات بیشتر به [ 39 ] مراجعه کنید.
-
کلیپر. کتابخانه ای در دسترس برای دلفی، سی، سی+++ و پایتون که برای برش دادن و جابجایی خطوط و چند ضلعی ها استفاده می شود. برای توضیح کامل این کتابخانه به [ 40 ] مراجعه کنید.
-
Dlib [ 41 ] و Eigen [ 42 ] برای پیادهسازی برخی از الگوریتمهای ریاضی مورد نیاز توسط تشخیص پردازششده شامل ADAclassifier و THEXfinder، مانند برازش منحنی یا صفحهای بودند.
3.2. سه تجسم
ابزارهای توصیف شده در این مقاله ممکن است در چندین محیط کاری کاملاً متفاوت استفاده شوند. به عنوان مثال، یک کاربر می تواند به طور مکرر از برنامه ADAfinder برای بازی با پارامترهای کنترل کننده الگوریتم استفاده کند و سپس تصمیم بگیرد که بهترین استراتژی برای شناسایی ADA در یک منطقه چیست. این به معنای استفاده از یک ابزار ارگونومیک است، جایی که تغییر چنین پارامترهایی باید بسیار آسان و ایمن باشد. در مقابل، هنگامی که چنین پارامترهایی یافت شد، ADAfinder می تواند به طور معمول، بدون دخالت انسانی، برای شناسایی ADA به عنوان یک مرحله دیگر در یک فرآیند دسته ای خودکار استفاده شود. در این حالت، پارامترها عمدتاً برای کل مجموعه داده یکسان خواهند بود و تنها باید تعداد کمی از آنها را تغییر داد. موقعیت های دیگری نیز وجود دارد که شناسایی ADA می تواند به عنوان بخشی از یک فرآیند بسیار بزرگتر دیده شود.
اینها دلایلی هستند که هر یک از برنامه های توضیح داده شده در بخش 2 در سه طعم یا تجسم مختلف موجود است:
-
به عنوان یک کلاس C++ (یکی برای هر برنامه) در یک کتابخانه. نرم افزار شخص ثالث (C++) که مایل به جاسازی منطق ADAfinder، ADAclassifier، THEXfinder، یا los2hv به عنوان یک جعبه سیاه است، فقط باید کلاس مربوطه را نمونه سازی کند. بنابراین، تعبیه منطق لازم برای شناسایی یا طبقهبندی ADA یا محاسبه اجزای افقی حرکت، تنها یک فراخوان رویه فاصله دارد. تنها مؤلفههای نرمافزار توسعهیافته در C++ میتوانند منطق را در کتابخانه یکپارچه کنند، زیرا هیچ پیوندی برای زبانهای دیگر ایجاد نشده است.
-
به عنوان یک ابزار خط فرمان. این امر امکان ادغام این ابزارها را در جریان های کاری دسته ای فراهم می کند، زیرا برای اجرای آنها نیازی به دخالت انسانی نیست. برای جزئیات مربوط به فایل های گزینه ها، مکانیسم مورد استفاده برای به دست آوردن اطلاعات کنترل کننده رفتار برنامه ها، به بخش 3.3 مراجعه کنید .
-
به عنوان یک برنامه دارای رابط کاربری گرافیکی. این طعم به دلیل سهولت استفاده از آن بهترین طعم برای آزمایش است. برنامه های مبتنی بر رابط کاربری گرافیکی، با این حال، نمی توانند در جریان کار دسته ای یکپارچه شوند.
همچنین نسخه های قابل اتصال از سه برنامه کاربردی برای ابزار Quantum GIS (QGIS) نسخه 2 وجود دارد. این افزونهها فقط نسخههای رابط کاربری گرافیکی مجموعه ابزار را فراخوانی میکنند، بنابراین از نیاز به خروج از محیط GIS هنگام اجرای هر یک از برنامههای آن اجتناب میکنند. ابزارها با استفاده از مقداری کد چسب نوشته شده در این مورد در پایتون به هم متصل می شوند. زیرا این انتخاب منحصر به فرد هنگام کار با QGIS است. توجه داشته باشید که به دلیل تغییراتی که بر نحوه ساخت این نوع نرم افزار برای آخرین نسخه این ابزار تأثیر می گذارد، افزونه ها هنوز به QGIS 3 منتقل نشده اند.
شایان ذکر است که نسخههای خط فرمان و رابط کاربری گرافیکی برنامهها فقط رابطهایی هستند که کلاسهای موجود در کتابخانه را فراخوانی میکنند که در واقع منطق ابزارها را پیادهسازی میکنند. این رویکرد امکان یک فرآیند تعمیر و نگهداری ساده را فراهم می کند. منطق فقط در یک مکان متمرکز است، مهم نیست که چگونه از این منطق استفاده می شود (کتابخانه، کنسول یا برنامه رابط کاربری گرافیکی). تغییر کلاس ها مستلزم به روز رسانی فوری در سه طعم هر برنامه است.
3.3. فایل های گزینه
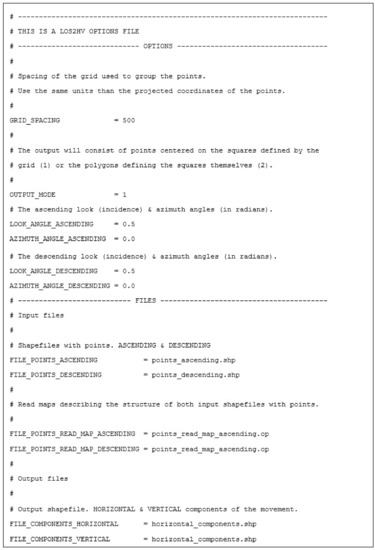
هر دو تجسم خط فرمان و رابط کاربری گرافیکی برنامه های کاربردی در مجموعه ابزار به فایل های گزینه برای بازیابی اطلاعات تعیین کننده نحوه رفتار متکی هستند. این شامل فایلهای ورودی یا خروجی و آستانههایی است که برخی شرایط را در میان دادههای دیگر کنترل میکنند. توجه داشته باشید که این برای ابزارهای مبتنی بر رابط کاربری گرافیکی نیز صادق است. در واقع، رابط کاربری گرافیکی تنها مکانیزمی است برای پر کردن شکافهای موجود در قالب فایل گزینه، به اصطلاح پیشفرضها .فایل ها. این امر طراحی کلاسهای پیادهسازی منطق را ساده میکند، زیرا فقط باید از یک رابط (فایل گزینه) مراقبت شود. تجسم خط فرمان سه ابزار دارای یک پارامتر است: نام فایل گزینه ها با پارامترهای برنامه. فایلهای گزینهای که توسط مجموعه ابزار استفاده میشود، فایلهای متنی ساده و بدون پیچیدگی هستند که شامل چندین برچسب و مقادیر میشود. نظرات برای روشن شدن هدف هر یک از این زوج ها ممکن است فقط با اضافه کردن یک کاراکتر “#” قبل از متن توصیفی درج شود. شکل 10 یک فایل گزینه واقعی و کاملاً توصیفی را نشان می دهد که برای کنترل برنامه los2hv استفاده می شود.
3.4. فایلهای شکل واقعی: فایلهای نقشه خواندن
شکل فایلهای ESRI، اگرچه استاندارد شدهاند، ممکن است شامل مجموعههای متغیری از ویژگیها باشند. حتی زمانی که یک shapefile مجموعه کاملی از ویژگیهای مورد نیاز یک ابزار را شامل میشود (مثلاً مختصات x و y و همچنین سرعت و سریهای زمانی تغییر شکل در مورد ADAfinder)، ممکن است در ستونهای مختلف ویژگی ظاهر شوند. .dbf) فایل. این معمولا به ارائه دهنده فایل ها بستگی دارد.
این تغییرپذیری ممکن است به یک مشکل جدی تبدیل شود، زیرا ماژول ورودی باید برای هر نوع شکل فایل برای پردازش تطبیق داده شود.
راه حل برای جلوگیری از این مشکل، «فایلهای نقشه خواندن» هستند که نحوه سازماندهی ویژگیهای مرتبط در یک فایل شیپ را تعریف میکنند. البته، ویژگیهای مورد نیاز ابزارها برای کارکرد صحیح باید همیشه در فایلها وجود داشته باشد، اما به لطف این فایلهای خواندنی نقشه، میتوان با تغییرات در موقعیتهایی که در آن ظاهر میشوند مقابله کرد.
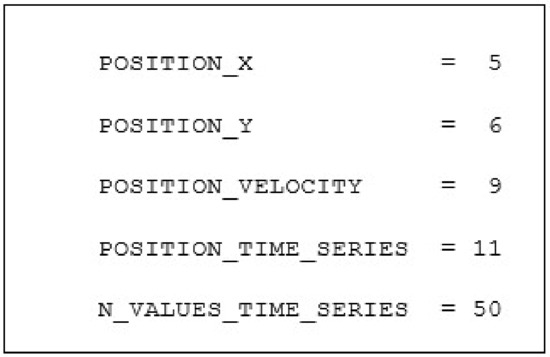
بنابراین، یک فایل نقشه خواندن فقط یک فایل گزینه اضافی است (به بخش 3.3 مراجعه کنید ) که در آن، با استفاده از جفت برچسب ها و مقادیر، موقعیت ویژگی هایی که هر ابزار بر آن تکیه دارد، مشخص می شود. شکل 11 نمونه ای از فایل نقشه خواندن ADAfinder برای ورودی PS است.
معنی جفت ها یا برچسب ها و مقادیر در شکل 11 به شرح زیر است:
-
مختصات x PS باید از ستون 5 در فایل dbf. خوانده شود،
-
ستونی که برای به دست آوردن مختصات y باید خوانده شود، ششمین ستون است،
-
سرعت را می توان در ستون شماره 9 یافت و در نهایت،
-
مجموعه مقادیر ساخت سری زمانی از ستون شماره 11 شروع می شود و در مجموع 50 عدد از این مقادیر وجود دارد.
بدیهی است که اگر یک شکل فایل با ورودی PS به شیوهای متفاوت سازماندهی شده باشد، مقادیر موجود در مثال بالا باید برای مطابقت با موقعیتهای واقعی که فیلدهای مورد علاقه در آن قرار دارند تغییر کنند.
توجه داشته باشید که چگونه چنین مکانیسم ساده ای مجموعه ابزار را بسیار انعطاف پذیرتر می کند و قادر به مقابله با مجموعه داده های واقعی است.
4. تضمین کیفیت
قبل از تحویل ابزارها به کنسرسیوم MOMIT، این ابزارها برای تضمین درستی کارکردشان یک فرآیند آزمایشی دقیق را طی کردند. توجه داشته باشید که هم یک برنامه آزمایشی و هم یک گزارش آزمایشی مربوط به کل مجموعه ابزار به ترتیب در [ 43 ، 44 ] توضیح داده شده است. در آنجا، جزئیات کامل در مورد چگونگی طراحی و انجام آزمایش ارائه شده است. با این حال، و به منظور کامل بودن، بخش های بعدی به طور خلاصه مرتبط ترین اقدامات انجام شده برای تضمین کیفیت کد را ارائه می دهد.
البته توجه داشته باشید که تست های توضیح داده شده در این بخش شامل THEXfinder به عنوان برنامه مستقلی که در حال حاضر است نمی شود. این به این دلیل است که فرآیند آزمایش قبل از تقسیم بندی ADA به دو قسمت انجام شد (به بخش 2.2 مراجعه کنید ). در نتیجه، فقط ADAclassifier و نه THEXfinder مورد آزمایش قرار گرفت.
این ظاهراً سؤالی را در مورد اعتبار آزمایشهای مربوط به ADAclassifier مطرح میکند، زیرا به طبقهبندی دو پدیده اضافی (انبساط، اثرات حرارتی) که نباید توسط این ابزار پیادهسازی شوند، توجه کرده است. مشکل ناشی از مکانیزمی است که توسط ADAfinder برای شناسایی ADA استفاده می شود. گفته شده است (به بخش 2.2 مراجعه کنید ) که چنین الگوریتمی برای یافتن ADA که نتیجه انبساط یا پدیده های حرارتی هستند مناسب نیست. بنابراین، اگر ADA متاثر از این پدیده ها نتواند به درستی توسط ADAfinder شناسایی شود، ADAclassifier نمی تواند به درستی آن ها را فهرست بندی کند.
اگرچه این اساساً درست است، اما آزمایشها برای ADAclassifier اعمال میشوند که آزمایشهای مصنوعی هستند (توضیح آزمایشهای ADAclassifier را در ادامه این بخش ببینید). داده ها به گونه ای تهیه شدند که با فرض اینکه ADA قبلاً به درستی شناسایی شده بود، می توان نتایج آزمایش شش نوع پدیده را پیش بینی کرد. در نتیجه، مشکل مربوط به شناسایی مناسب ADA، تستهای ADAclassifier را باطل نکرد. این باعث میشود که آزمایشهای الگوریتمهای خاص برای شناسایی انبساط و اثرات حرارتی معتبر باشند، زیرا اینها با استفاده از دادههای ورودی صحیح (هر چند مصنوعی) اجرا شدهاند. این به این معنی است که نتایجی که در آن لحظه صحیح در نظر گرفته شده بودند هنوز معتبر هستند، از جمله دو مورد خاص که اکنون THEXfinder مسئول آن است.
با این حال THEXfinder هنوز به طور کامل بررسی نشده است. از بحث بالا باید مشخص شود که الگوریتمهای خاص برای تشخیص انبساط یا اثرات حرارتی صحیح هستند، زیرا اینها به عنوان اجزای ADAclassifier بررسی شدهاند. با این وجود، روش استفاده شده توسط THEXfinder برای شناسایی (طبقه بندی) ADA هنوز به طور دقیق آزمایش نشده است. به همین دلیل است که نتایج عملکرد این ابزار در بخش 5 ارائه نشده است.
با بازگشت به خود آزمایشها، در مورد ADAfinder، زمانی که این ابزار توسعه یافت، یک روش دستی برای مدتی در محیطهای GIS استفاده میشد، بنابراین مجموعههای داده شامل ورودی و خروجی در دسترس بودند. بنابراین، آزمایشها اساساً شامل مقایسه نتایج روش دستی با نتایج ایجاد شده توسط ابزار بود.
مکانیزمی برای مقایسه سریع نتایج حاصل از راه حل های دستی و خودکار ابداع شد. از نقطه نظر عددی، اساساً شامل صادر کردن مقادیر مشخصهها برای بررسی هر دو خروجی (دستی و خودکار)، مرتبسازی آنها برای مطابقت آسان با ویژگیهای هر فایل و سپس محاسبه تفاوت مقادیر آنها بود که در همه موارد ، زیر آستانه تعیین شده توسط دقت معمولی 8 بایتی IEEE 754 دوبل (حدود پانزدهمین موقعیت اعشاری) بودند. این بدان معنی است که نتایج (به عنوان مثال، مختصات نقاط خروجی) معادل بودند.
برای بررسی صحت الگوریتم، دو نوع آزمون انجام شد. اولاً، مقادیر صفاتی که در سطح قطعیت قرار دارند برای برابری مطلق بررسی شدند، زیرا اینها با قدرهای اعداد صحیح (غیر ممیز) نشان داده شدند. سپس تعداد ADA و محتویات آنها نیز بررسی شد. این بدان معناست که هم الگوریتم دستی و هم الگوریتم خودکار باید تعداد یکسانی از ADA را شناسایی میکردند و مجموعه نقاط موجود در هر یک از آنها باید یکسان باشد. هر دو آزمون عددی و صحت به طور رضایت بخشی گذرانده شدند.
وضعیت ADAclassifier و los2hv متفاوت بود. هیچ نتیجه قبلی وجود نداشت، بنابراین هیچ مجموعه داده قابل اعتمادی برای مقایسه خروجی های آنها در دسترس نبود. بنابراین، رویکرد ایجاد مجموعه داده های مصنوعی برای هر دو برنامه بود. منطق پشت راه ایجاد این مجموعه داده ها، سازماندهی اطلاعات در الگوهای هندسی به راحتی قابل شناسایی بود، بنابراین، هنگامی که با هم ترکیب می شوند، ناحیه(هایی) که در آن نتایج مثبت به دست آمده بودند نیز قابل پیش بینی بودند.
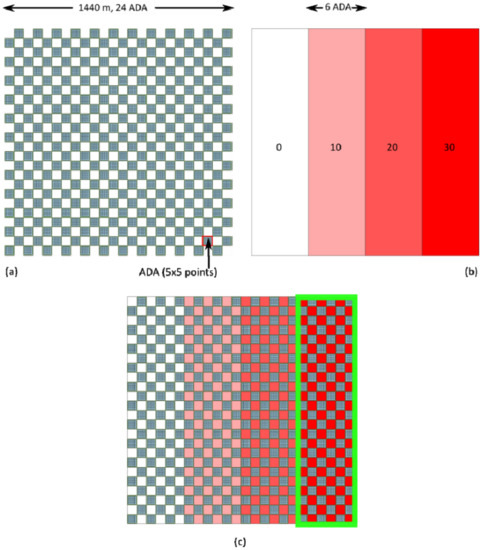
به عنوان مثال، و برای بررسی الگوریتم زمین لغزش در برنامه ADAclassifier، همه ADA به صورت چند ضلعی های مربع شکل یکسان حاوی یک شبکه منظم 5×5 PS ایجاد شدند. این ADA در یک الگوی شطرنجی 24×24 توزیع شده است ( شکل 12 a را ببینید). اجزای افقی حرکت در 4 نوار عمودی مجاور با پوشش 6×24 ADA توزیع شد. مقدار مشخصی برای هر یک از آنها تنظیم شد (به ترتیب از چپ به راست، 0، 10، 20 و 30 میلی متر در سال). این در شکل 12 ب نشان داده شده است. سایر الگوهای به راحتی قابل شناسایی برای بقیه فایل های ورودی استفاده شد. مانند مقادیر شیب ها در DTM.
سپس، برای مثال، اگر الگوریتم زمین لغزش تحمیل کند که مقدار مولفه افقی حرکت باید بالاتر از 25 میلیمتر در سال باشد، آنگاه فقط سمت راستترین ستون ساخته شده از 6×24 ADA این نیاز را برآورده میکند. این را می توان در شکل 12 ج مشاهده کرد که در آن ADA و اجزای افقی حرکت ( شکل 12 a,b) همپوشانی دارند.
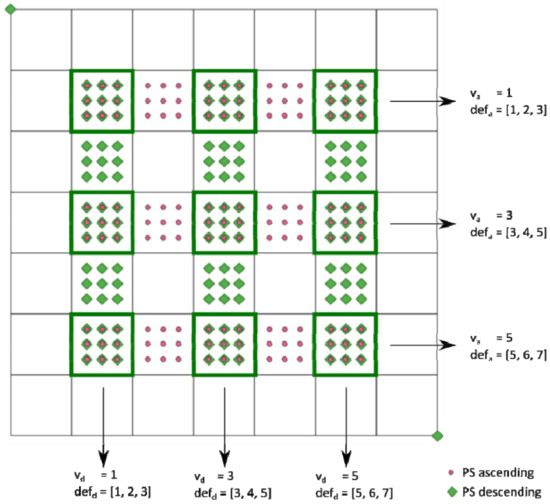
تنظیمات مشابهی برای بررسی برنامه los2hv استفاده شد. در این مورد، ناحیه مورد آزمایش با استفاده از یک شبکه 7 × 7 جداسازی شد. در آنجا، دو گروه از PS متعلق به مجموعه دادههای صعودی و نزولی در ردیفها و ستونهای متناوب مرتب شدند، بنابراین فقط در یک زیرمجموعه شناختهشده یا کاشیهای تعریفشده توسط صفحه شطرنجی PS که از هر دو مجموعه داده میآیند، مطابقت دارند. برای یک تصویر گرافیکی از این تنظیمات به شکل 13 مراجعه کنید . در آنجا، کاشیهایی که توسط یک مربع سبز احاطه شدهاند، تنها کاشیهایی هستند که هم دارای PS صعودی و هم نزولی هستند و بنابراین مکانهای منحصر به فردی هستند که اجزای افقی و عمودی حرکت را میتوان با los2hv محاسبه کرد.
مقادیر شناخته شده برای سرعت تنظیم شد ( v a و v d به ترتیب برای مجموعه داده های صعودی و نزولی، دوباره به شکل 13 نگاه کنید ) و سری های زمانی تغییر شکل (صعودی/نزولی) ( def a و def d ) برای هر PS اختصاص داده شد. این امر امکان محاسبه دستی (و به راحتی) نتایجی را که باید از los2hv انتظار داشت را ممکن ساخت و در نتیجه صحت آن را تأیید کرد.
5. ارزیابی عملکرد
تنها یکی از برنامههای توسعهیافته و آزمایششده، ADAfinder، بر رویهای متکی است که نتایج قبلی قبلاً برای آن وجود داشته است. بنابراین، این تنها مرجعی بود که مرجع عملکرد برای مقایسه در دسترس بود. از آنجایی که چنین رویه ای به صورت دستی اجرا شد (یک سری از مراحل انجام شده توسط یک اپراتور با استفاده از ابزارهای ارائه شده توسط GIS)، بهبود قابل توجهی در عملکرد به دلیل اتوماسیون انتظار می رفت.
هیچ مرجع عملکردی برای los2hv و ADAclassifier وجود نداشت ( بخش 4 توضیح می دهد که زمانی که آزمایش ها انجام شد، ADAclassifier تشخیص انبساط و اثرات حرارتی را انجام داد. اکنون، این دو الگوریتم به THEXfinder منتقل شده اند. این نشان می دهد که نتایج عملکرد داده شده است. برای ADAclassifier در [ 44 ]، در واقع، بدبینانه هستند، زیرا این شامل زمان مورد نیاز برای بررسی دو پدیده اضافی است که اکنون مسئولیت این ابزار نیست. بنابراین هیچ انتظار خاصی در مورد بهبود عملکرد وجود نداشت. همه آزمایش ها با استفاده از رایانه ای با ویژگی های زیر انجام شد: ویندوز 10 64 بیتی، Intel Core i5-5300U @ 2.3 گیگاهرتز، 2 هسته، 4 رشته، 8 گیگابایت رم، 500 گیگابایت هارد دیسک مغناطیسی (غیر SSD). میز 1عملکرد سه مورد از این ابزارها را نشان می دهد.
6. در دسترس بودن
اگرچه نویسندگان هنوز آماده ارائه مجموعهای از ابزارهایی نیستند که در اینجا به عنوان یک پروژه منبع باز توضیح داده شده است، اما میتوان نسخه رایگان و قابل اجرا (ویندوز) ADAfinder، ADAclassifier، THEXfinder و los2hv را کاملاً بر اساس تقاضا، مستقیماً از نویسندگان، برای اهداف تجاری و غیر تجاری. لطفا برای جزئیات بیشتر با اولین نویسنده این اثر تماس بگیرید.
7. موارد تست واقعی
در این بخش دو مطالعه موردی برای نشان دادن ابزارهای ارائه شده در بالا نشان داده شده است. متأسفانه THEXfinder در این مناطق اعمال نشده است، زیرا این ابزار هنوز به طور کامل آزمایش نشده است (به بخش 5 مراجعه کنید ). در آینده نزدیک، مقاله جدیدی با THEXfinder که در برخی از حوزه های مورد علاقه اعمال می شود، می پردازد.
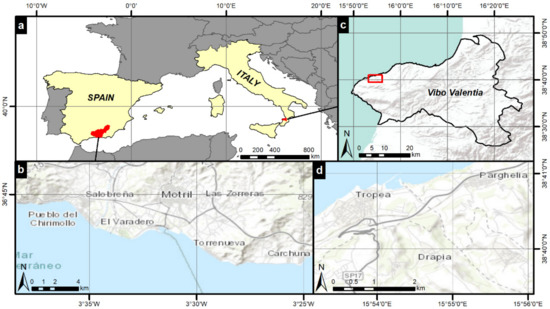
مورد اول که در چارچوب پروژه RISKCOAST (SOE3/P4/E0868) پردازش و مطالعه شده است، منطقه ای به مساحت حدود 100 کیلومتر مربع واقع در منطقه ساحلی استان گرانادا، در جنوب اسپانیا (اندلس) است. از جمله شهرهای Salobreña و Motril. برای این سایت آزمون تعداد محدودی از داده های کمکی برای تجزیه و تحلیل طبقه بندی در دسترس بود. منطقه دوم، که بیشتر اطلاعات اختیاری ADAclassifier برای آن در دسترس بود، در جنوب شرقی ایتالیا، بین Tropea و Zaccanopoli، در سواحل کالابریا در استان Vibo Valentia قرار دارد و 12 کیلومتر مربع امتداد دارد .
شکل 14 موقعیت این دو ناحیه آزمایشی را نشان می دهد.
7.1. جنوب اسپانیا
7.1.1. داده های ورودی
نقشه جابجایی مشتق شده از InSAR، که ورودی اصلی ADAfinder است، با استفاده از رویکرد PSIG با استفاده از ابزارهای پردازش توسعهیافته از بخش ژئوماتیک CTTC ایجاد شده است. پردازش اجازه می دهد تا سرعت سالانه و سری زمانی جابجایی تخمین زده شود. برای جزئیات بیشتر در مورد پردازش PSI به [ 45 ] مراجعه کنید. مجموعه ای از 138 تصویر به دست آمده توسط ماهواره های باند C Sentinel-1 (توسعه یافته توسط ESA برای برنامه کوپرنیک)، در هندسه صعودی و حالت اکتساب Wide Swath، با وضوح کامل پردازش شده است که دوره مارس 2015 تا سپتامبر 2018 را پوشش می دهد. وضوح داده های Sentinel-1 تقریباً 4 × 14 متر مربع استو نمونه گیری موقت 6 روز است. دادههای کمکی مورد استفاده برای طبقهبندی ADA عبارتند از: (1) مدل زمین دیجیتال پروژه PNOA-LIDAR (از مرکز ملی اطلاعات جغرافیایی؛ CNIG) با سلول وضوح 5 متر، (2) نقشه زمینشناسی از موسسه de Estadística y Cartografía de Andalucía، در مقیاس 1:400.000; (3) داده های کاداستر از اداره کل اسپانیا برای کاداستر برای انتخاب مناطق شهری و ساخت و ساز. و (4) پوشش زمین Corine 2018 برای تکمیل اطلاعات موجودی کاداستر در مورد ساختار و مناطق زیربنایی.
7.1.2. نتایج
شکل فایل ورودی (نقشه جابجایی PSI) برای ADAfinder شامل 61802 نقطه اندازه گیری شده است. از این نقشه تعداد کل 82 ADA استخراج شده است که 32 عدد QI = 1، 20 QI = 2، 13 QI = 3 و 17 QI = 4 دارند ( شکل 2 ). کلاس QI به کاربر اجازه می دهد تا سطح نویز (یعنی قابلیت اطمینان) سری زمانی جابجایی (TS) را در هر ADA استخراج شده به راحتی درک کند. بر اساس طبقه بندی QI، ما تصمیم گرفته ایم با انتخاب تنها ADA با قابلیت اطمینان بالاتر اطلاعات TS (QI برابر با 1 یا 2، در مجموع 53 ADA) برای طبقه بندی ADA، که در آن تصمیم گیری در مورد اینکه آیا ADA یک تسویه بالقوه است که بر اساس روند میانگین TS است. برای طبقه بندی خروجی ( شکل 15 زیر و جدول 2در صفحه 22)، می خواهیم تأکید کنیم که داده های کمکی بسیار کمی به عنوان ورودی انتخاب شده اند. به عنوان مثال، هیچ موجودی زمین لغزش یا فرونشست استفاده نشده است، و همچنین تجزیه افقی-عمودی در دسترس نبود (ما فقط با هندسه صعودی اکتساب کار کردهایم). به همین دلیل، برای هر دو پدیده زمین لغزش و فرونشست، تنها نتایجی که با عنوان “پتانسیل” برچسب گذاری شده اند حداکثر امکان پذیر خواهد بود. حداقل زاویه شیب برای لغزش بالقوه 5 درجه و حداکثر زاویه شیب برای نشست بالقوه 10 درجه تنظیم شده است. یادآوری می کنیم که شیب در نظر گرفته شده، مقدار شیب متوسط در ADA است. آستانه های شیب مختلف امکان طبقه بندی دوگانه ADA را فراهم می کند که در حد بین دو پدیده بالقوه است. علاوه بر این، یک ADA تنها در صورتی به عنوان نشست بالقوه طبقه بندی می شود که بر اساس سنگ شناسی چهارتایی باشد. برای آنچه مربوط به استقرار تحکیم ناشی از ساخت و سازهای جدید است، 6 ADA به دلیل روند نمایی معکوس واضح میانگین TS و تقاطع با چند ضلعی های مربوط به زیرساخت ها و مناطق شهری به عنوان نشست طبقه بندی شده اند. یک ADA به عنوان نشست بالقوه طبقه بندی شده است زیرا روند نمایی معکوس را ارائه می دهد، اما با هیچ چندضلعی از موجودی کاداستر تلاقی نمی کند. در میان سکونتگاه ADA، 5 مورد در راه آهن A-7 اخیراً ساخته شده و یکی در ساختمانی نزدیک به بندر موتریل قرار دارد. هر دو سازه بین سالهای 2014 و 2015 ساخته شدهاند. برای ADA طبقهبندی شده به عنوان زمین لغزشهای بالقوه، برخی از آنها ناپایداریهای شیب شناخته شدهای هستند که بر ساحل گرانادا تأثیر میگذارند. برای آنچه مربوط به استقرار تحکیم ناشی از ساخت و سازهای جدید است، 6 ADA به دلیل روند نمایی معکوس واضح میانگین TS و تقاطع با چند ضلعی های مربوط به زیرساخت ها و مناطق شهری به عنوان نشست طبقه بندی شده اند. یک ADA به عنوان نشست بالقوه طبقه بندی شده است زیرا روند نمایی معکوس را ارائه می دهد، اما با هیچ چندضلعی از موجودی کاداستر تلاقی نمی کند. در میان سکونتگاه ADA، 5 مورد در راه آهن A-7 اخیراً ساخته شده و یکی در ساختمانی نزدیک به بندر موتریل قرار دارد. هر دو سازه بین سالهای 2014 و 2015 ساخته شدهاند. برای ADA طبقهبندی شده به عنوان زمین لغزشهای بالقوه، برخی از آنها ناپایداریهای شیب شناخته شدهای هستند که بر ساحل گرانادا تأثیر میگذارند. برای آنچه مربوط به استقرار تحکیم ناشی از ساخت و سازهای جدید است، 6 ADA به دلیل روند نمایی معکوس واضح میانگین TS و تقاطع با چند ضلعی های مربوط به زیرساخت ها و مناطق شهری به عنوان نشست طبقه بندی شده اند. یک ADA به عنوان نشست بالقوه طبقه بندی شده است زیرا روند نمایی معکوس را ارائه می دهد، اما با هیچ چندضلعی از موجودی کاداستر تلاقی نمی کند. در میان سکونتگاه ADA، 5 مورد در راه آهن A-7 اخیراً ساخته شده و یکی در ساختمانی نزدیک به بندر موتریل قرار دارد. هر دو سازه بین سالهای 2014 و 2015 ساخته شدهاند. برای ADA طبقهبندی شده به عنوان زمین لغزشهای بالقوه، برخی از آنها ناپایداریهای شیب شناخته شدهای هستند که بر ساحل گرانادا تأثیر میگذارند. 6 ADA به دلیل روند نمایی معکوس واضح میانگین TS و تقاطع با چند ضلعی های مربوط به زیرساخت ها و مناطق شهری به عنوان نشست طبقه بندی شده اند. یک ADA به عنوان نشست بالقوه طبقه بندی شده است زیرا روند نمایی معکوس را ارائه می دهد، اما با هیچ چندضلعی از موجودی کاداستر تلاقی نمی کند. در میان سکونتگاه ADA، 5 مورد در راه آهن A-7 اخیراً ساخته شده و یکی در ساختمانی نزدیک به بندر موتریل قرار دارد. هر دو سازه بین سالهای 2014 و 2015 ساخته شدهاند. برای ADA طبقهبندی شده به عنوان زمین لغزشهای بالقوه، برخی از آنها ناپایداریهای شیب شناخته شدهای هستند که بر ساحل گرانادا تأثیر میگذارند. 6 ADA به دلیل روند نمایی معکوس واضح میانگین TS و تقاطع با چند ضلعی های مربوط به زیرساخت ها و مناطق شهری به عنوان نشست طبقه بندی شده اند. یک ADA به عنوان نشست بالقوه طبقه بندی شده است زیرا روند نمایی معکوس را ارائه می دهد، اما با هیچ چندضلعی از موجودی کاداستر تلاقی نمی کند. در میان سکونتگاه ADA، 5 مورد در راه آهن A-7 اخیراً ساخته شده و یکی در ساختمانی نزدیک به بندر موتریل قرار دارد. هر دو سازه بین سالهای 2014 و 2015 ساخته شدهاند. برای ADA طبقهبندی شده به عنوان زمین لغزشهای بالقوه، برخی از آنها ناپایداریهای شیب شناخته شدهای هستند که بر ساحل گرانادا تأثیر میگذارند. اما با هیچ چندضلعی از موجودی کاداستر تلاقی نمی کند. در میان سکونتگاه ADA، 5 مورد در راه آهن A-7 اخیراً ساخته شده و یکی در ساختمانی نزدیک به بندر موتریل قرار دارد. هر دو سازه بین سالهای 2014 و 2015 ساخته شدهاند. برای ADA طبقهبندی شده به عنوان زمین لغزشهای بالقوه، برخی از آنها ناپایداریهای شیب شناخته شدهای هستند که بر ساحل گرانادا تأثیر میگذارند. اما با هیچ چندضلعی از موجودی کاداستر تلاقی نمی کند. در میان سکونتگاه ADA، 5 مورد در راه آهن A-7 اخیراً ساخته شده و یکی در ساختمانی نزدیک به بندر موتریل قرار دارد. هر دو سازه بین سالهای 2014 و 2015 ساخته شدهاند. برای ADA طبقهبندی شده به عنوان زمین لغزشهای بالقوه، برخی از آنها ناپایداریهای شیب شناخته شدهای هستند که بر ساحل گرانادا تأثیر میگذارند.46 ، 47 ، 48 ]، در این منطقه آزمایشی حرکات مؤثر بر شهرنشینی لوس آلمندروس و آلفامار گنجانده شده است.
ما در نظر می گیریم که یک طبقه بندی چندگانه از همان ADA به کاربر نهایی اجازه می دهد بداند که حرکت شناسایی شده یک مورد پیچیده است. به عنوان مثال، ADA طبقه بندی شده به عنوان نشست بالقوه و زمین لغزش نیاز به تجزیه و تحلیل بیشتری دارد، زیرا می تواند یک حرکت زمین لغزش است که تثبیت شده است (باعث روند نمایی معکوس)، یا نشستی به دلیل ساخت و ساز هنوز موجودی نشده است.
7.2. جنوب شرقی ایتالیا
7.2.1. داده های ورودی
در این مورد، نقشه های تغییر شکل مشتق شده از InSAR با استفاده از رویکرد جفت پراکندگی پایدار (PSP، [ 49 ]) به دست آمد. پردازش شامل سه فریم نقشه نواری COSMO-SkyMed، یکی صعودی و دو فریم نزولی بود. تصاویر باند X COSMO-SkyMed Stripmap وضوح زمین 3×3 متر دارند. فریم صعودی از 71 تصویر تشکیل شده است که بین مارس 2013 و اکتبر 2018 با میانگین زاویه تابش 29 درجه به دست آمده است. اولین فریم نزولی از 29 تصویر تشکیل شده است که بین مارس 2017 و مارس 2019 با میانگین زاویه تابش 26 درجه به دست آمده است. فریم نزولی دوم از 94 تصویر تشکیل شده است که بین اکتبر 2011 و اکتبر 2018 با میانگین زاویه برخورد 29 درجه به دست آمده است.
به طور مکمل، یک مدل دیجیتال ارتفاع (DTM)، یک نقشه فهرست زمین لغزش، یک نقشه زمینشناسی و یک نقشه کاربری زمین در فرآیند طبقهبندی انجام شده توسط ADAclassifier ادغام شدهاند. DTM از وضوح سلول 5 متری منطقه کالابریا تشکیل شده است. نقشه زمین شناسی – مقیاس 1:25.000 – و نقشه فهرست زمین لغزش ایتالیا – پروژه IFFI – منطقه مورد مطالعه نیز استفاده شده است. در نهایت، پوشش زمین Corine، سطح IV برای نقشه برداری مناطق شهری استفاده شده است.
7.2.2. نتایج
در مجموع 38 و 133 ناحیه تغییر شکل فعال (ADA)، که همه آنها QI = 1 را نشان می دهند، به ترتیب برای مجموعه داده های InSAR صعودی و نزولی شناسایی شدند. اندازه های ADA از 51.4 تا 704.8 متر مربع متغیر است و عمدتاً در مناطق شهری و نقش برجسته های واقع در قسمت جنوب شرقی منطقه مورد تجزیه و تحلیل قرار دارند.
طبقه بندی ADA شناسایی شده با استفاده از مجموعه داده های صعودی و نزولی با استفاده از طبقه بندی ADA نشان می دهد که ADA به عنوان زیر طبقه بندی می شود: (1) زمین لغزش (42.7٪) و زمین لغزش بالقوه (15.2٪). (2) فرونشست زمین بالقوه (24.6%). و (3) تسویه حساب ادغام (8.8%). هیچ فروچاله بالقوه ای توسط ADAclassifier شناسایی نشد. جدول 2 نتایج به دست آمده را خلاصه می کند که در شکل 16 نشان داده شده است.
زمین لغزش ها عمدتاً در مناطقی با شیب مشخص قرار دارند که نقشه موجودی نشان دهنده وجود فرآیندهای گرانشی است. بسیاری از زمین لغزش ها (66 و 7، به ترتیب برای فریم های نزولی و صعودی) تایید شده اند، زیرا آنها پدیده های شناخته شده موجود در پایگاه داده IFFI هستند. به طور مکمل، 26 ADA (به ترتیب 20 و 6، برای قاب های نزولی و صعودی) زمین لغزش های بالقوه هستند زیرا در مناطقی با شیب های بالاتر از 10 درجه قرار می گیرند و/یا جابجایی های افقی غیر قابل اغماض را نشان می دهند. بررسی ادبیات تایید می کند که این منطقه به ویژه مستعد فرآیندهای هوازدگی، گسترش جانبی و رانش زمین است [ 50 ].
در مناطق شهری Tropea و Zaccanopoli، 42 منطقه احتمالی فرونشست (28 و 14، به ترتیب برای قاب های نزولی و صعودی) شناسایی شده است. این ADA در مناطق بسیار مسطح که از نظر زمین شناسی از رسوبات کواترنر تشکیل شده اند، قرار دارند. برخی از این ADA که به عنوان مناطق فرونشست طبقه بندی می شوند، می توانند به بهره برداری بیش از حد از منابع آب زیرزمینی، معمولی برای دشت های ساحلی منطقه کالابریا مربوط شوند [ 51 ، 52 ]. ADA طبقه بندی شده به عنوان سکونتگاه های ادغام شده عمدتاً در بندر و در برخی مکان های خاص منطقه شهری قرار دارند. این مناطق با یک تابع نمایی معکوس با ضریب تعیین مطابقت دارند ( r2) بالاتر از 0.8 و بنابراین احتمالاً با نشستهای پس از تثبیت دایکهای بندر و برخی از ساختمانهای اخیر مرتبط است.
8. بحث و نتیجه گیری
این کار مجموعه ای از ابزارهای یکپارچه شده توسط ADAfinder، losh2v، ADAclassifier و تا حدی THEXfinder را ارائه می دهد، زیرا این ابزار در زمان انتشار این اثر نمی تواند به طور کامل آزمایش شود. هدف این برنامه ها خودکارسازی شناسایی و طبقه بندی ADA است. همه آنها بر متدولوژی هایی تکیه می کنند که به طور کامل در موارد استفاده واقعی (تولید) قبل از تحقق آنها به عنوان ماژول های نرم افزاری استفاده شده است. اجرای آنها بر اساس تکنیک های به خوبی اثبات شده است. اگرچه ابزارها – نه روششناسیهای زیربنایی – در ابتدا برای ردیابی پدیدههای تغییر شکل زمین در نزدیکی زیرساختهای راهآهن تصور شدند، آنها ممکن است در هر زمینه دیگری استفاده شوند، همانطور که توسط نویسندگان دیگر ارائه شده است [ 28 ، 29 ، 30 ].
برنامهها با در نظر گرفتن جنبههایی مانند الگوریتمهای پیادهسازیشده، ورودیها، خروجیها یا نحوه استفاده از آنها (تجسمهای رابط کاربری گرافیکی یا کنسول، یا کلاسها در یک کتابخانه قابل جاسازی) به اندازه کافی با جزئیات کافی توضیح داده شدهاند. رویههای تضمین صحت، و همچنین عملکرد ADAfinder، los2hv، و ADAclassifier نیز مورد بحث قرار گرفتهاند.
توجه داشته باشید که، به ویژه در مورد ابزارهای طبقهبندی (ADAclassifier و THEXfinder)، توانایی این برنامهها برای کار با تعداد زیادی ورودی اختیاری (یعنی موجودیهای چند نوع) به درجه بالایی از انعطافپذیری منجر میشود. ابزارها را در موقعیتهای بسیار متنوعی که در محیطهای تولید واقعی معمول است، مفید میسازد. به عبارت دیگر، ADAclassifier می تواند نتایج را برای تنها یک پدیده تغییر شکل ارائه دهد یا بسته به تعداد ورودی های اختیاری ارائه شده، به چهار مورد از این موارد برسد. انعطافپذیری طبقهبندیکننده ADA در دو مورد استفاده نشان داده میشود (به بخش 7.1 و بخش 7.2 مراجعه کنید )، که در آن در دسترس بودن دادههای ورودی برای فرآیند طبقهبندی کاملاً متفاوت بود. وضعیت در مورد استفاده اسپانیایی (بخش 7.1 )، که در آن تنها تعداد کمی از داده های کمکی موجود است، متأسفانه از مورد ایتالیایی ( بخش 7.2 )، که تعداد قابل توجهی از منابع داده در دسترس بود، معمول تر است . واقعیتی که در اینجا باید به آن اشاره کرد این است که ADAclassifier (و THEXfinder) قادر به مقابله با این دو موقعیت شدید هستند.
شایان ذکر است که نتایج ارائه شده توسط این ابزارها تحت تأثیر اشکالات ذاتی تکنیک InSAR مورد استفاده به عنوان ورودی، مانند از دست دادن انسجام و حساسیت کم برای اندازهگیری جابجایی جهتهای شمال-جنوب است.
این واقعیت کمتر مهم نیست که خودکارسازی روشهای از پیش موجود با استفاده از ابزارهای قابل اعتماد ( بخش 4 )، زمان پاسخگویی خوبی را فراهم میکند ( بخش 5)) که ممکن است به طور کامل توسط کاربر از طریق مجموعه کاملی از پارامترهای قابل ویرایش کنترل شود و راه را برای تجزیه و تحلیل بهتر مناطق مورد علاقه هموار کند. هر منطقه متفاوت است، و بنابراین تنظیم پارامترهای کنترل کننده رفتار فرآیند برای به دست آوردن نتایج قابل اعتماد، وظیفه ای است که بستگی به این دارد که چنین مناطقی در کجا قرار دارند. اجتناب از فرآیندهای دستی مستعد خطا به لطف این ابزارهای خودکار، و داشتن نتایج در چند ثانیه یا چند دقیقه، ارزیابی اینکه آیا مجموعه پارامترهای آغازین مناسبترین هستند یا نه، بنابراین امکانپذیر و سریع است. -تکرار تست پس از آزمون تقریباً بدون هزینه و در نتیجه افزایش کیفیت نتایج. این تکنیکی است که در هنگام استفاده از رویه های دستی، به عنوان مثال، با تکیه بر محیط های GIS نیز استفاده می شود. از این رو،
در مورد موارد استفاده واقعی، نتایج بهدستآمده، کاربرد ابزارهای توسعهیافته برای شناسایی و طبقهبندی خودکار و موفقیتآمیز فرآیندهای زمینشناسی و ژئوتکنیکی مؤثر بر مناطق وسیعی از قلمرو را نشان میدهد. لغزشها، لغزشهای احتمالی، سکونتگاههای تحکیم و فرونشست زمین بالقوه در هر دو مکان آزمایشی با استفاده از ورودیهایی با ویژگیهای مختلف (به عنوان مثال، قطعنامههای InSAR و DTM، نقشههای موجودی، و نقشههای کاربری زمین) شناسایی شدهاند. بنابراین، امکان استفاده از داده های ورودی مختلف، تطبیق پذیری بالایی از ابزارهای پیشنهادی را نشان می دهد. علاوه بر این، این روش این مزیت را دارد که نتایج را می توان به صورت دوره ای با ترکیب مجموعه داده های جدید InSAR و اطلاعات جانبی به روز رسانی به روز کرد.
خروجیهای ارائهشده توسط ADAtools شامل مجموعهای از نقشهها است که میتواند برای مدیریت مخاطرات زمینشناسی در مدیریت زمین و برنامهریزی مورد توجه قرار گیرد.
علاوه بر این، ADAtools را می توان اولین گام به سوی ارضای نیاز به ابزارهای پس پردازش به دلیل استفاده روزافزون از داده های PSI در سطح منطقه ای، ملی و اروپایی در نظر گرفت [ 3 ]. ADAtools به ذینفعان مختلف اجازه می دهد تا یک انتخاب سریع و تفسیر اولیه از نقشه های تغییر شکل متشکل از میلیون ها / میلیاردها نقطه داشته باشند. این امر باعث کاهش حجم داده های مدیریت شده از نظر سخت افزار، فضا و زمان تجزیه و تحلیل می شود، بنابراین استفاده عملیاتی از نقشه های جابجایی PSI در مناطق وسیع افزایش می یابد. در پایان، شایان ذکر است که ADAtools ممکن است در صورت تقاضا، کاملاً رایگان، هم برای اهداف تجاری و هم برای اهداف غیرتجاری به دست آید (برای جزئیات به بخش 6 مراجعه کنید).
منابع
- کنسرسیوم MOMIT. صفحه اصلی | کنسرسیوم پروژه MOMIT. رصد و پایش چند مقیاسی تهدیدات زیرساخت راه آهن . در دسترس آنلاین: https://www.momit-project.eu/ (در 3 ژوئیه 2020 قابل دسترسی است).
- کروستو، ام. مونسرات، او. کوواس-گونزالس، ام. دوانتری، ن. کریپا، ب. تداخل سنجی پراکنده پایدار: یک بررسی. ISPRS J. Photogramm. از راه دور. Sens. 2016 , 115 , 78-89. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کروستو، ام. سولاری، ال. مروز، م. بالاسیس-لوینسن، جی. کاساگلی، ن. فری، م. اوین، ا. Moldestadk، DA; بیتسون، ال. گرریری، ال. و همکاران تکامل DInSAR در سطح وسیع: از خدمات منطقه ای و ملی تا سرویس حرکت زمینی اروپا. Remote Sens. 2020 ، 12 ، 2043. [ Google Scholar ] [ CrossRef ]
- کوستانتینی، م. فرتی، ا. مینتی، ف. فالکو، اس. تریلو، اف. کلمبو، دی. نوالی، ف. مالواروسا، اف. مامون، سی. وکیولی، اف. و همکاران تجزیه و تحلیل تغییر شکلهای سطح در کل قلمرو ایتالیا با پردازش تداخل سنجی دادههای رادار ERS، Envisat و COSMO-SkyMed. سنسور از راه دور محیط. 2017 ، 202 ، 250-275. [ Google Scholar ] [ CrossRef ]
- میلیلو، پی. پریسین، دی. Salzer، JT; لوندگرن، پی. لاکاوا، جی. میلیلو، جی. Serio، C. نظارت بر سلامت ساختاری سد از فضا: بینشهای حاصل از تکنیکهای جدید InSAR و مدلسازی چند پارامتری اعمال شده در سد Pertusillo Basilicata، ایتالیا. بین المللی J. Appl. زمین Obs. Geoinf. 2016 ، 52 ، 221-229. [ Google Scholar ] [ CrossRef ]
- سلواکوماران، س. پلانک، اس. گیس، سی. روسی، سی. میدلتون، سی. نظارت از راه دور برای پیشبینی شکست آبشستگی پل با استفاده از تکنیکهای انباشتگی رادار دیافراگم مصنوعی تداخلسنجی (InSAR). بین المللی J. Appl. زمین Obs. Geoinf. 2018 ، 73 ، 463-470. [ Google Scholar ] [ CrossRef ]
- ریس-کارمونا، سی. بارا، ا. Galve، JP; مونسرات، او. پرز-پنا، JV; متئوس، آر.ام. نوتی، دی. روانو، پی. میلارز، آ. لوپز-وینیلس، جی. و همکاران Sentinel-1 DInSAR برای نظارت بر زمین لغزش های فعال در زیرساخت های بحرانی: مورد مخزن قوانین (جنوب اسپانیا). Remote Sens. 2020 , 12 , 809. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سولاری، ال. دل سولداتو، م. رسپینی، ف. بارا، ا. بیانچینی، اس. کنفورتو، پی. کاساگلی، ن. Crosetto، M. بررسی تداخل سنجی ماهواره ای برای تشخیص زمین لغزش در ایتالیا. Remote Sens. 2020 , 12 , 1351. [ Google Scholar ] [ CrossRef ]
- فراتینی، پ. کروستا، گیگابایت؛ روسینی، ام. Allievi, J. فعالیت و رفتار سینماتیکی زمین لغزش های عمیق از اندازه گیری نرخ جابجایی PS-InSAR. زمین لغزش 2018 ، 15 ، 1053-1070. [ Google Scholar ] [ CrossRef ]
- ژانگ، ی. منگ، ایکس. جردن، سی. نوولینو، آ. دایکسترا، تی. چن، جی. بررسی زمین لغزش های آهسته در منطقه ژوکو چین با استفاده از سری زمانی InSAR. زمین لغزش 2018 ، 15 ، 1299-1315. [ Google Scholar ] [ CrossRef ]
- چامپالینی، آ. سولاری، ال. جیانچینی، آر. گالانتی، ی. مورتی، اس. ارزیابی فرونشست ناشی از بار ساختمانهای طولانیمدت با استفاده از تکنیک InSAR و دادههای ژئوتکنیکی: مطالعه موردی یک پایانه بار (توسکانی، ایتالیا). بین المللی J. Appl. زمین Obs. Geoinf. 2019 ، 82 ، 101925. [ Google Scholar ] [ CrossRef ]
- ژو، سی. گونگ، اچ. ژانگ، ی. وارنر، TA; وانگ، سی. تکامل فضایی و زمانی فرونشست زمین در دشت پکن 2003-2015 با استفاده از تداخل سنجی پراکنده پایدار (PSI) با داده های SAR چند منبعی. Remote Sens. 2018 , 10 , 552. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- توسی، ال. لیو، سی دی; تیتینی، پ. Strozzi، T. فرونشست زمین در محیط های ساحلی: پیشرفت دانش در سرزمین ساحلی ونیز توسط TerraSAR-X. PSI. Remote Sens. 2018 , 10 , 1191. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Malinowska، AA; ویتکوفسکی، WT; هژمانوفسکی، آر. چانگ، ال. ون لیجن، FJ; نظارت بر وقوع فروچاله هانسن، RF بر روی معادن ذغال سنگ متروکه کم عمق با تداخل سنجی پراکنده پایدار مبتنی بر ماهواره. مهندس جئول 2019 ، 262 ، 105336. [ Google Scholar ] [ CrossRef ]
- ترون، آ. Engelbrecht, J. نقش رصد زمین، با تمرکز بر تداخل سنجی SAR، برای ارزیابی خطر فروچاله. Remote Sens. 2018 , 10 , 1506. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بائر، جی. میگن، ی. Nof، RN; راز، ای. لیاخوفسکی، وی. اندازهگیریهای Shalev، E. InSAR و مدلسازی ویسکوالاستیک فرونشست اولیه فروچاله: پیامدهایی برای تشکیل فروچاله، هشدار اولیه و خواص رسوب. جی. ژئوفیز. Res. زمین گشت و گذار. 2018 ، 123 ، 678-693. [ Google Scholar ] [ CrossRef ]
- چلونی، دی. دی نوولیس، وی. آلبانو، م. آنتونیلی، آ. آنزیدی، م. آتزوری، س. آوالونه، آ. بیگنامی، دی. بونانو، م. کالکاترا، اس. و همکاران مدل ژئودتیکی توالی زلزله ایتالیا مرکزی 2016 استنباط شده از داده های InSAR و GPS. ژئوفیز. Res. Lett. 2017 ، 44 ، 6778-6787. [ Google Scholar ] [ CrossRef ]
- مورو، ام. سارولی، م. استراموندو، اس. بیگنامی، سی. آلبانو، م. فالکوچی، ای. گوری، س. دوگلیونی، سی. پولکاری، م. تالینی، م. و همکاران بینش جدید در مورد پیش سازهای زلزله از InSAR. علمی 2017 ، 7 ، 1-11 . [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- نیش، جی. خو، سی. ون، ی. وانگ، اس. خو، جی. ژائو، ی. یی، L. زلزله 7.5 مگاواتی پالو 2018: یک رویداد گسیختگی فوق برشی محدود شده توسط InSAR و لرزه نگاری های منطقه ای باند پهن. Remote Sens. 2019 ، 11 ، 1330. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- دی تراگلیا، اف. نولسینی، تی. سولاری، ال. چامپالینی، آ. فرودلا، دبلیو. استری، دی. بندتو، آ. ریندی، ع. مارینی، ال. مونی، ن. و همکاران تغییر شکل دلتای گدازه به عنوان یک پروکسی برای ناپایداری شیب زیردریایی سیاره زمین. علمی Lett. 2018 ، 488 ، 46-58. [ Google Scholar ] [ CrossRef ]
- Schaefer، LN; دی تراگلیا، اف. شوسارد، ای. لو، ز. نولسینی، تی. Casagli، N. نظارت بر ناپایداری شیب آتشفشان با رادار دهانه مصنوعی: بررسی و دادههای جدید از آتشفشانهای Pacaya (گواتمالا) و Stromboli (ایتالیا). علوم زمین Rev. 2019 , 192 , 236-257. [ Google Scholar ] [ CrossRef ]
- آنانتراسیریچای، ن. بیگز، جی. آلبینو، اف. هیل، پی. Bull, D. کاربرد یادگیری ماشینی برای طبقه بندی تغییر شکل های آتشفشانی در داده های InSAR که به طور معمول تولید می شود. جی. ژئوفیز. Res. زمین 2018 ، 123 ، 6592–6606. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بیکن، م. چیخارت، آر. پاپکو، جی. بارلاک، ج. روناک، م. آدامیسین، پ. Perissin, D. remotIO: سرویس نظارت بر زیرساخت InSAR چند زمانی Sentinel-1 با بهروزرسانیهای خودکار و قابلیتهای داده کاوی. Remote Sens. 2020 , 12 , 1892. [ Google Scholar ] [ CrossRef ]
- رسپینی، ف. بیانچینی، اس. چامپالینی، آ. دل سولداتو، م. سولاری، ال. نوالی، ف. دل کونته، اس. روچی، آ. فرتی، ا. Casagli، N. نظارت مستمر، نیمه خودکار تغییر شکل زمین با استفاده از ماهواره های Sentinel-1. علمی Rep. 2018 , 8 , 1-11. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- ناوارو، جی. کوواس-گونزالس، ام. توماس، آر. بارا، ا. Crosetto، M. مجموعه ابزاری برای شناسایی و طبقه بندی مناطق تغییر شکل فعال با استفاده از داده های SAR تداخل سنجی. در مجموعه مقالات پنجمین کنفرانس بین المللی سیستم های اطلاعات جغرافیایی، نظریه، کاربردها و مدیریت (GISTAM 2019)، کرت، یونان، 3 تا 6 مه 2019. [ Google Scholar ]
- بارا، ا. سولاری، ال. بژار-پیزارو، م. مونتسرات، او. بیانچینی، اس. هررا، جی. کروستو، ام. سارو، آر. گونزالس-آلونسو، ای. متئوس، آر.ام. و همکاران روشی برای شناسایی و به روز رسانی مناطق تغییر شکل فعال بر اساس تصاویر Sentinel-1 SAR. Remote Sens. 2017 ، 9 ، 1002. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- توماس، آر. پاگان، جی. ناوارو، جی. کانو، م. پاستور، جی ال. ریکلمه، ا. کوواس-گونزالس، ام. کروستو، ام. بارا، ا. مونسرات، او. و همکاران شناسایی نیمه خودکار و پیش غربالگری فرآیندهای تغییر شکل زمین شناسی-ژئوتکنیکی با استفاده از مجموعه داده های تداخل سنجی پراکنده پایدار. Remote Sens. 2019 ، 11 ، 1675. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- سولاری، ال. بارا، ا. هررا، جی. بیانچینی، اس. مونسرات، او. بژار-پیزارو، م. کروستو، ام. سارو، آر. Moretti, S. تشخیص سریع حرکات زمین بر روی عناصر آسیب پذیر با استفاده از داده های Sentinel-1 InSAR. Geomat. نات. خطر خطرات 2018 ، 9 ، 152-174. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سولاری، ال. بیانچینی، اس. فرانچینی، آر. بارا، ا. مونسرات، او. توگاز، پ. برتولو، دی. کروستو، ام. Catani، F. داده های تداخل سنجی ماهواره ای برای ارزیابی شدت زمین لغزش در مناطق کوهستانی. بین المللی J. Appl. زمین Obs. Geoinf. 2020 , 87 , 102028. [ Google Scholar ] [ CrossRef ]
- اصلان، جی. فوملیس، م. راکولز، دی. دی میشل، م. برناردی، اس. Cakir، Z. نقشه برداری و پایش زمین لغزش با استفاده از تکنیک تداخل سنجی پراکنده پایدار (PSI) در کوه های آلپ فرانسه. Remote Sens. 2020 , 12 , 1305. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فرتی، ا. مونتی گوارنیری، آ. پراتی، سی. روکا، اف. Massonet, D. InSAR Principles-Guidelines for SAR Interferometry Processing and Interpretation, TM-19 ; انتشارات ESA: اوکلند، نیوزلند، 2007. [ Google Scholar ]
- توماس، آر. کانو، م. پاستور، جی ال. Riquelme, A. طبقه بندی خودکار مناطق تغییر شکل فعال. یادداشت فنی پروژه MOMIT 2018. در دسترس آنلاین: https://www.momit-project.eu/sites/default/files/2018-12/MOMIT_technical_note_%20Automatic%20classification%20of%20Active%20Deformation%20.pdf320Areas جولای 2020).
- ناوارو، جی. Cuevas، M. ADAfinder-ابزاری برای خودکارسازی تشخیص نواحی تغییر شکل فعال. نکته فنی پروژه MOMIT. در دسترس آنلاین: https://www.momit-project.eu/sites/default/files/2018-12/MOMIT_technical_note_ADAfinder%20documentation.pdf (در 3 ژوئیه 2020 قابل دسترسی است).
- ناوارو، جی. کوواس، ام. Crosetto, M. ADAclassifier-Classify ADAs Automatically. نکته فنی پروژه MOMIT. در دسترس آنلاین: https://www.momit-project.eu/sites/default/files/2018-12/MOMIT_technical_note_ADAClassifier%20documentation.pdf (در 3 ژوئیه 2020 قابل دسترسی است).
- او، ال. وو، ال. لیو، اس. وانگ، ز. سو، سی. لیو، اس.-ن. نقشه برداری دو بعدی میدان تغییر شکل سری های زمانی شیب بزرگ با جفت کردن DINSAR-SBAS با MAI-SBAS. Remote Sens. 2015 ، 7 ، 12440–12458. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- نوتی، دی. هررا، جی. بیانچینی، اس. میسینا، س. گارسیا داوالیلو، جی سی. Zucca، F. روشی برای بهبود تجزیه و تحلیل داده های PSI زمین لغزش. بین المللی J. Remote Sens. 2014 ، 35 ، 2186-2214. [ Google Scholar ] [ CrossRef ]
- ناوارو، جی. Cuevas, M. los2hv-محاسبه اجزای افقی و عمودی حرکت. نکته فنی پروژه MOMIT. در دسترس آنلاین: https://www.momit-project.eu/sites/default/files/2018-12/MOMIT_technical_note_los2hv%20documentation.pdf (در 3 ژوئیه 2020 قابل دسترسی است).
- شرکت Qt. Qt | توسعه نرم افزار چند پلتفرمی برای جاسازی شده و دسکتاپ. در دسترس آنلاین: https://www.qt.io/ (در 3 ژوئیه 2020 قابل دسترسی است).
- Warmerdam, F. Shapelib C Library. در دسترس آنلاین: https://shapelib.maptools.org/ (در 3 ژوئیه 2020 قابل دسترسی است).
- جانسون، ای. کلیپر – یک کتابخانه برش چند ضلعی رایگان نرم افزار منبع باز. در دسترس آنلاین: https://www.angusj.com/delphi/clipper.php (در 3 ژوئیه 2020 قابل دسترسی است).
- King, DE Dlib-ml: A Machine Learning Toolkit. جی. ماخ. فرا گرفتن. Res. 2010 ، 10 ، 1755-1758. [ Google Scholar ]
- Guennebaud، G. Benoît, J. Eigen v3. در دسترس آنلاین: https://eigen.tuxfamily.org (در 3 ژوئیه 2020 قابل دسترسی است).
- ناوارو، جی. کوواس، ام. Crosetto، M. SW برنامه آزمون اجزای پردازش داده. پروژه MOMIT قابل تحویل در دسترس آنلاین: https://www.momit-project.eu/sites/default/files/2018-12/MOMIT%20-%20D3.3%20-%20SW%20data%20processing%20components%20test%20plan.pdf (در 3 ژوئیه 2020 قابل دسترسی است).
- ناوارو، جی. توماس، آر. کوواس، ام. Crosetto، M. SW گزارش تست اجزای پردازش داده. پروژه MOMIT قابل تحویل در دسترس آنلاین: https://www.momit-project.eu/sites/default/files/2018-12/MOMIT%20-%20D3.4%20-%20SW%20data%20processing%20components%20test%20report_v1.0.1 .pdf (در 3 ژوئیه 2020 قابل دسترسی است).
- دوانتری، ن. کروستو، ام. مونسرات، او. کوواس-گونزالس، ام. کریپا، ب. رویکردی به تداخل سنجی پراکنده پایدار. Remote Sens. 2014 , 6 , 6662–6679. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- نوتی، دی. Galve، JP; متئوس، آر.ام. مونسرات، او. لاماس-فرناندز، اف. فرناندز-چاکون، اف. رولدان-گارسیا، FJ; پرز-پنا، JV; کروستو، ام. Azañón، JM فعال سازی مجدد زمین لغزش ساحلی ناشی از انسان. پایش با تکنیکهای PSInSAR و بررسی آسیبهای شهری (SE اسپانیا). زمین لغزش 2015 ، 12 ، 1007-1014. [ Google Scholar ] [ CrossRef ]
- Galve، JP; پرز-پنا، JV; آزانون، جی.ام. کلسون، دی. کالو، اف. ریس-کارمونا، سی. جبالوی، ا. روانو، پی. متئوس، آر.ام. نوتی، دی. و همکاران ارزیابی سرویس SBAS InSAR پلت فرم بهره برداری از خطر زمین (GEP) آژانس فضایی اروپا. Remote Sens. 2017 , 9 , 1291. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- چاکون، جی. آلامدا-هرناندز، پ. چاکون، ای. دلگادو، جی. الحمدونی، ر. فرناندز، پ. فرناندز، تی. گومز-لوپز، جی.ام. ایریگارای، سی. Jiménez-Perálvarez, J. و همکاران رانش زمین Calaiza در سواحل گرانادا (اندلس، اسپانیا). گاو نر مهندس جئول محیط زیست 2019 ، 78 ، 2107–2124. [ Google Scholar ] [ CrossRef ]
- کوستانتینی، م. فالکو، اس. مالواروسا، اف. مینتی، ف. تریلو، اف. Vecchioli، F. تداخل سنجی جفت پراکنده پایدار: رویکرد و کاربرد برای داده های COSMO-SkyMed SAR. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2014 , 7 , 2869–2879. [ Google Scholar ] [ CrossRef ]
- ایتو، اف. پری، اف. Fortunato، G. پدیده های گسترش جانبی و فرآیندهای هوازدگی از منطقه Tropea (کالابریا، جنوب ایتالیا). محیط زیست علوم زمین 2015 ، 73 ، 4595-4608. [ Google Scholar ] [ CrossRef ]
- بیانچینی، اس. Moretti, S. تجزیه و تحلیل فرونشست زمین اخیر در دشت سیبری (ایتالیا) با استفاده از روش های مبتنی بر تداخل سنجی SAR ماهواره ای. بین المللی J. Remote Sens. 2015 ، 36 ، 4550-4569. [ Google Scholar ] [ CrossRef ]
- رسپینی، ف. سیگنا، اف. Moretti، S. نقشه برداری چند زمانی از فرونشست زمین در مقیاس حوضه با بهره برداری از تداخل سنجی پراکنده پایدار: مطالعه موردی دشت Gioia Tauro (ایتالیا). J. Maps 2012 ، 8 ، 514-524. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
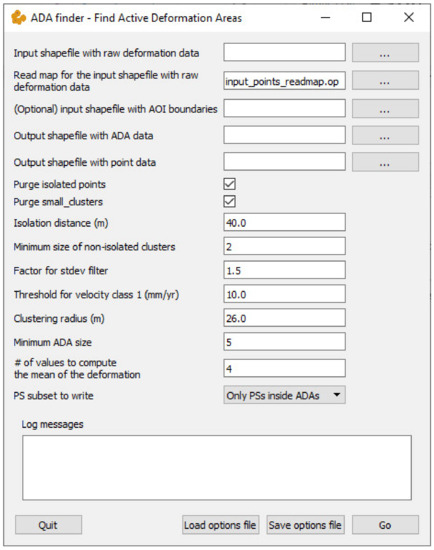
شکل 1. نسخه رابط کاربری گرافیکی (GUI) ابزار ADAfinder.
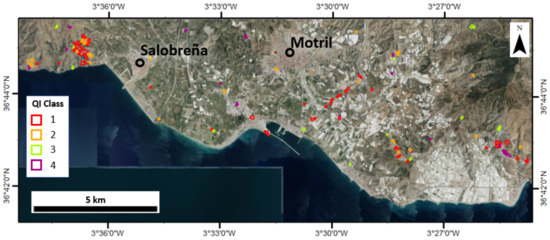
شکل 2. نمونه ای از خروجی ADAfinder در منطقه ساحلی گرانادا (S اسپانیا). رنگ ها برای نشان دادن کیفیت اطلاعات سری زمانی (TS) با توجه به ویژگی شاخص کیفیت در شکل فایل خروجی استفاده می شوند. قرمز: “بسیار قابل اعتماد”، نارنجی: “قابل اعتماد”، سبز آهکی: “نه چندان قابل اعتماد” و بنفش: “مطمئن نیست”.
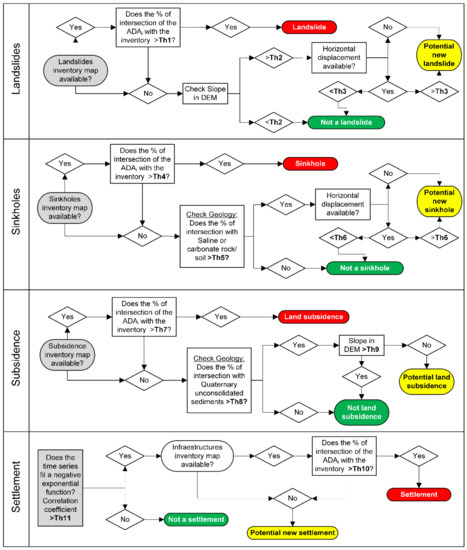
شکل 3. طرحی از الگوریتم های ADAclassifier، اصلاح شده از [ 4 ]. توجه داشته باشید که برچسبهای Th1-Th11 در نمودار با برخی از آستانههایی که به طور مفصل در راهنمای کاربر ADAclassifier توضیح داده شده است مطابقت دارد [ 34 ].
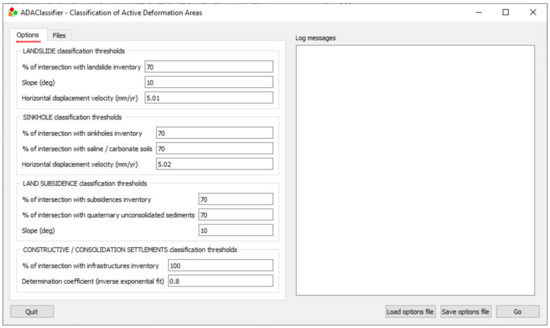
شکل 4. رابط کاربری گرافیکی ADAclassifier (برگه گزینه ها).
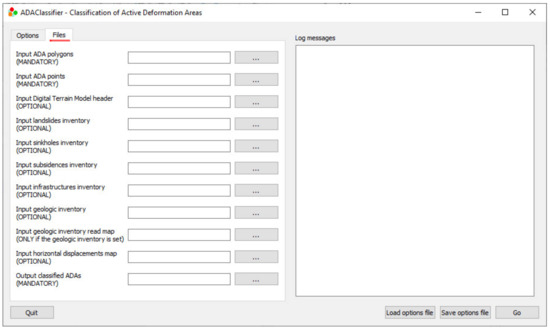
شکل 5. رابط کاربری گرافیکی ADAclassifier (برگه فایل).
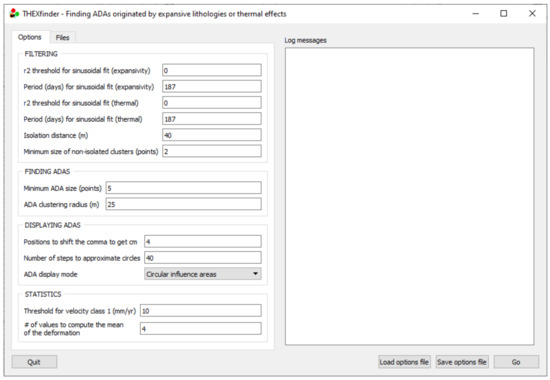
شکل 6. GUI THEXfinder (برگه گزینه ها).
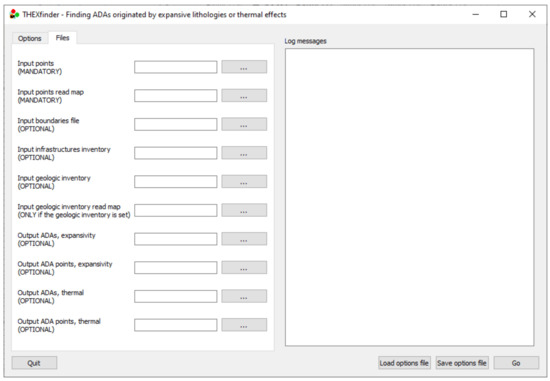
شکل 7. رابط کاربری گرافیکی THEXfinder (برگه فایل).
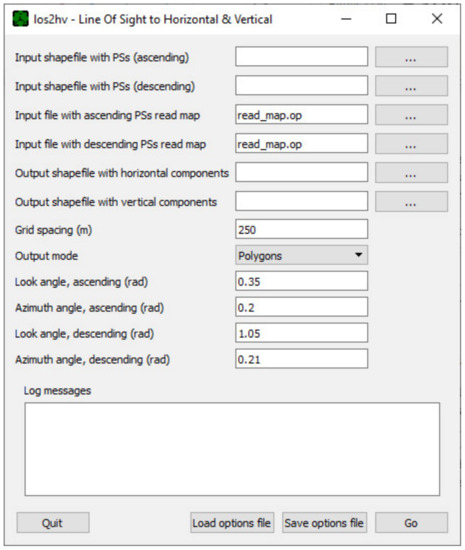
شکل 8. رابط کاربری گرافیکی los2hv.
شکل 9. los2v: تسرها و پراکنده های پایدار صعودی و نزولی (PS). نقاط سفید نشان دهنده PS در مدار صعودی است. رنگ قرمز PS را در مدار نزولی نشان می دهد. منبع: [ 25 ].
شکل 10. یک مثال واقعی از فایل گزینه های los2hv.
شکل 11. مثالی از یک فایل متنی ساده خواندن نقشه شکل فایل ورودی.
شکل 12. طبقه بندی کننده ADA: نمونه های داده مصنوعی. ( a ) الگوی شطرنجی را برای ADA نشان میدهد، در حالی که ( b ) نوارها را با مقادیر اجزای افقی حرکت نشان میدهد. مستطیل سبز در ( c ) ناحیهای را نشان میدهد که در آن باید نتایج مثبتی برای الگوریتم زمین لغزش انتظار داشت زیرا در آنجا شرایط تعیین شده توسط الگوریتمها برآورده میشود. منبع: [ 25 ].
شکل 13. مجموعه داده مصنوعی برای los2hv. کاشی های سبز تنها مواردی هستند که هم PS صعودی و هم نزولی وجود دارد، و بنابراین، مناطق منحصر به فردی هستند که اجزای افقی حرکت را می توان محاسبه کرد.
شکل 14. ( الف ) مکان موارد آزمایش واقعی در استان گرانادا (اسپانیا) و ویبو والنتیا (کالابریا، ایتالیا). ( ب ) جزئیات منطقه آزمایشی واقع در ساحل گرانادا. ( ج ) محل آزمایش Vibo Valentia. و ( د ) جزئیات منطقه آزمایشی Vibo Valentia.
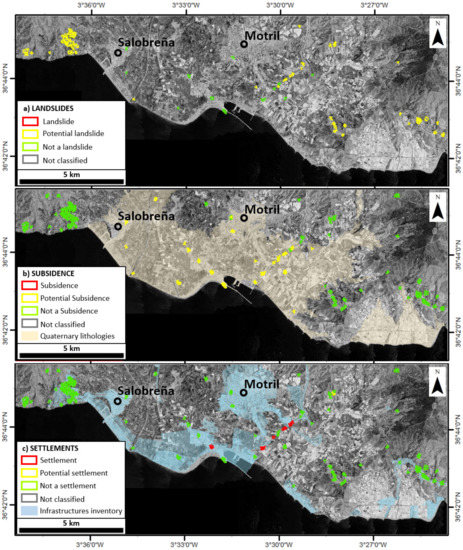
شکل 15. طبقه بندی ADA در منطقه مورد مطالعه واقع در جنوب اسپانیا (استان گرانادا، اندلس).
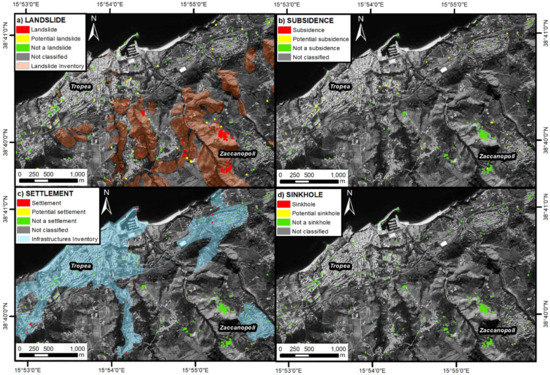
شکل 16. طبقه بندی مناطق تغییر شکل فعال (ADA) در منطقه مورد مطالعه Tropea-Zaccanopoli به عنوان: ( الف ) زمین لغزش. ( ب ) فرونشست؛ ( ج ) تسویه حساب های تلفیق. و ( د ) فروچاله ها.


بدون دیدگاه