

چکیده
GeoAI یا هوش مصنوعی جغرافیایی، به موضوعی پرطرفدار و مرزی برای تجزیه و تحلیل فضایی در جغرافیا تبدیل شده است. اگرچه پیشرفت های زیادی در کاوش در ادغام هوش مصنوعی و جغرافیا انجام شده است، هنوز تعریف روشنی از GeoAI، دامنه تحقیقات آن، یا بحث گسترده ای در مورد اینکه چگونه راه های جدیدی برای حل مسئله در علوم اجتماعی و زیست محیطی را قادر می سازد وجود ندارد. این مقاله مروری جامع از تحقیقات GeoAI مورد استفاده در تجزیه و تحلیل تصویر در مقیاس بزرگ و مبنای روششناختی آن، آخرین پیشرفتها در کاربردهای مکانی و مزایای نسبی نسبت به روشهای سنتی ارائه میکند. ما این بررسی از تحقیقات GeoAI را بر اساس انواع مختلف تصویر یا دادههای ساختاریافته، از جمله تصاویر ماهوارهای و هواپیماهای بدون سرنشین، نماهای خیابان، و دادههای ژئو-علمی سازماندهی میکنیم. و همچنین کاربردهای آنها در انواع تحلیل تصویر و وظایف بینایی ماشین. در حالی که برنامه های کاربردی مختلف تمایل به استفاده از انواع مختلف داده ها و مدل ها دارند، ما شش نقطه قوت اصلی تحقیقات GeoAI را خلاصه کردیم، از جمله (1) امکان تجزیه و تحلیل در مقیاس بزرگ. (2) اتوماسیون؛ (3) دقت بالا؛ (4) حساسیت در تشخیص تغییرات ظریف.
(5) تحمل نویز در داده ها. و (6) پیشرفت سریع تکنولوژیکی. از آنجایی که GeoAI یک زمینه به سرعت در حال توسعه باقی می ماند، ما همچنین شکاف های دانش فعلی را توصیف می کنیم و جهت گیری های تحقیقاتی آینده را مورد بحث قرار می دهیم. (4) حساسیت در تشخیص تغییرات ظریف. (5) تحمل نویز در داده ها. و (6) پیشرفت سریع تکنولوژیکی. از آنجایی که GeoAI یک زمینه به سرعت در حال توسعه باقی می ماند، ما همچنین شکاف های دانش فعلی را توصیف می کنیم و جهت گیری های تحقیقاتی آینده را مورد بحث قرار می دهیم. (4) حساسیت در تشخیص تغییرات ظریف. (5) تحمل نویز در داده ها. و (6) پیشرفت سریع تکنولوژیکی. از آنجایی که GeoAI یک زمینه به سرعت در حال توسعه باقی می ماند، ما همچنین شکاف های دانش فعلی را توصیف می کنیم و جهت گیری های تحقیقاتی آینده را مورد بحث قرار می دهیم.
کلید واژه ها:
هوش مصنوعی ؛ یادگیری عمیق ؛ سی ان ان ; ترانسفورماتور ; LSTM
1. مقدمه
GeoAI یا هوش مصنوعی جغرافیایی، یک حوزه تحقیقاتی هیجان انگیز است که هوش مصنوعی را برای پشتیبانی از حل مشکلات جغرافیایی به روشهای نوآورانه اعمال و گسترش میدهد. تحقیقات در زمینه هوش مصنوعی، که از علم کامپیوتر نشات میگیرد، بر توسعه سیستمهای رایانهای برای به دست آوردن هوش ماشینی متمرکز است تا از نحوه درک، استدلال و تعامل انسان با جهان و با یکدیگر تقلید کند [ 1 ]]. اگرچه حوزه هوش مصنوعی در دهههای گذشته بالا و پایینهایی را تجربه کرده است، اما اخیراً به دلیل پیشرفتهای چشمگیر در یادگیری عمیق (ماشین)، قدرت محاسباتی بسیار در دسترس و نیازهای مبرم برای استخراج و درک کلان داده، شتاب فوقالعادهای به دست آورده است. بدون شک، هوش مصنوعی به دلیل اهمیت زیادی که در تقویت اقتصاد ملی، تضمین امنیت داخلی، ارائه واکنش سریع اضطراری و توانمندسازی نیروی کار رقابتی دارد، به رقابت فضایی جدید در قرن بیست و یکم تبدیل شده است. فن آوری های هوش مصنوعی به طور گسترده در صنعت و علم [ 2 ]، به ویژه در شیمی [ 3 ]، ریاضیات [ 4 ]، علوم پزشکی [ 5 ]، روانشناسی [ 6 ]، علوم اعصاب [ 7 ] استفاده می شود.]، نجوم [ 8 ] و فراتر از آن.
روند رو به رشد تحقیقاتی که از هوش مصنوعی استفاده میکنند به جغرافیا ختم نمیشود. در واقع جغرافی یکی از رشته هایی است که از هوش مصنوعی در روزهای اول استفاده جدی کرده است. به دلیل ماهیت میان رشته ای دستور کار تحقیقاتی خود، جغرافیا از مزیت طبیعی پذیرش نظریه ها، روش ها و ابزارهای جدید از سایر رشته ها برخوردار است. در دهه 1990، Openshaw و Openshaw [ 9] کتابی با عنوان «هوش مصنوعی در جغرافیا» منتشر کرد که تکنیکها و روشهای هوش مصنوعی مانند سیستمهای خبره، شبکههای عصبی، سیستم فازی و محاسبات تکاملی را معرفی میکرد که در آن زمان پیشرفتهتر بودند. کاربرد آنها در جغرافیا علاوه بر تبدیل شدن به مرجع برجسته هوش مصنوعی در جغرافیا، بحث و انتقاد در مورد ترکیب این دو زمینه و ویژگی های علمی هوش مصنوعی را نیز برانگیخت [ 10 ]]. اگرچه برخی از نگرانیها، مانند تفسیرپذیری هوش مصنوعی و فقدان «نظریه»، امروزه نیز معتبر هستند، تحقیقات هوش مصنوعی در سالهای اخیر به قدری پیشرفت کرده است که از مدلسازی منطق رسمی به کاوش در یادگیری عمیقتر مبتنی بر دادهها تکامل یافته است. چشم انداز تحقیقاتی مبتنی بر، که به عنوان روشی قدرتمند برای تجزیه و تحلیل داده های بزرگ روزافزون تقاضای بالایی دارد.
جغرافیا در حال تبدیل شدن به یک حوزه علم داده های بزرگ است. در حوزه جغرافیای فیزیکی، سیستمهای رصد جهانی، مانند ماهوارههای عملیاتی، که نظارت مستمر بر محیط، جو، اقیانوس و سایر اجزای سیستم زمین را فراهم میکنند، در حال تولید مقادیر زیادی از تصاویر سنجش از دور در مکانهای زمانی و مکانی بالا یا بسیار بالا هستند. و وضوح طیفی. سیستمهای شبکه حسگر توزیعشده مستقر در شهرها همچنین دادههای بیدرنگ درباره وضعیت زیرساختهای فیزیکی و حرکت افراد، وسایل نقلیه و سایر اجزای پویا یک شهر (هوشمند) جمعآوری میکنند [ 11 ].]. برای کاربردهای اجتماعی، استفاده رایج از رسانههای اجتماعی مبتنی بر مکان، دستگاههای دستی مجهز به GPS، پلتفرمهای مختلف اطلاعات جغرافیایی داوطلبانه (VGI) و سایر «حسگرهای اجتماعی» به ایجاد اطلاعات گسترده در مورد تحرک انسان، افکار عمومی و ردپای دیجیتالی مردم در مقیاس این مجموعه دادهها علاوه بر حجم زیاد، دارای قالبهای مختلفی هستند، از دادههای جغرافیایی-علمی ساختیافته گرفته تا ابردادههای نیمه ساختاریافته تا پستهای رسانههای اجتماعی بدون ساختار. این منابع مکانی در حال افزایش ارزش افزوده ای را برای تحقیقات موجود فراهم می کند و به ما امکان می دهد به سؤالات در مقیاسی پاسخ دهیم که قبلاً ممکن نبود. با این حال، چالشهای مهمی را برای روشهای تحلیلی سنتی که برای مدیریت مجموعه دادههای کوچک با کیفیت خوب طراحی شدهاند، ایجاد میکند [ 12 ].]. برای استفاده کامل از ارزش علمی دادههای بزرگ جغرافیایی، جغرافیدانان شروع به تغییر چرخ دندهها به سمت جغرافیای دادهمحور کردند، که بر هوش مصنوعی و یادگیری ماشینی تکیه میکند تا امکان کشف دانش جدید زمینفضایی را فراهم کند.
اصطلاح GeoAI برای اولین بار در کنفرانس ACM SIGSPATIAL در سال 2017 ابداع شد [ 13 ]. سپس به سرعت توسط شرکتهای با فناوری پیشرفته مانند مایکروسافت و Esri برای ارجاع به راهحلهای سازمانی خود که هوش موقعیت مکانی و هوش مصنوعی را ترکیب میکردند، پذیرفته شد. محققان اغلب از این اصطلاح زمانی استفاده می کنند که تحقیقات آنها شامل داده کاوی، یادگیری ماشینی و یادگیری عمیق است، پیشرفت اخیر در هوش مصنوعی. در اینجا ما GeoAI را به عنوان یک منطقه تحقیقاتی فرا رشته ای جدید تعریف می کنیم که از هوش مصنوعی برای تجزیه و تحلیل مبتنی بر مکان با استفاده از داده های مکانی (بزرگ) بهره برداری و توسعه می دهد. شکل 1نمای بزرگی از GeoAI را به تصویر می کشد. این پژوهش هوش مصنوعی را با جغرافیا، که علم مکان و فضا است، ادغام می کند. اگر بپذیریم که هوش مصنوعی در مورد توسعه هوش ماشینی است که می تواند مانند انسان ها استدلال کند، GeoAI، که پیوند هوش مصنوعی و جغرافیا است، هدفش توسعه نسل بعدی ماشین هایی است که توانایی انجام استدلال مکانی و تجزیه و تحلیل مبتنی بر مکان را دارند. مانند انسان ها، با کمک داده های بزرگ جغرافیایی. تحت چتر هوش مصنوعی، یادگیری ماشینی و سایر الگوریتمهای مبتنی بر داده، که میتوانند از حجم عظیمی از دادهها بدون برنامهریزی صریح استخراج و یاد بگیرند، به فناوری تبدیل شدهاند. و یادگیری عمیق، به عنوان زیر مجموعه ای از یادگیری ماشین، نشاندهنده پیشرفتی است که یادگیری ماشین را از معماری کم عمق به عمیق ارتقا میدهد و امکان مدلسازی و استخراج الگوهای پیچیده را از طریق استفاده از شبکههای عصبی مصنوعی فراهم میکند. برای ادغام بهتر هوش مصنوعی و جغرافیا و ایجاد GeoAI به عنوان یک رشته تحقیقاتی که ماندگار خواهد بود، نیاز به پیوند قوی بین این دو زمینه وجود دارد. جغرافیا با راهنمایی نظریه های تثبیت شده، مانند قانون اول جغرافیای توبلر، دیدگاه منحصر به فردی برای درک جهان و جامعه ارائه می دهد.14 ] و قانون دوم جغرافیا [ 15 ]. این نظریهها و اصول، قابلیتهای هوش مصنوعی فعلی را به سمت روشها و راهحلهای GeoAI صریح فضایی گسترش میدهند [ 16 ، 17 ] تا هوش مصنوعی بتواند بهدرستی با حوزه جغرافیایی سازگار شود. قلمرو تحقیقاتی آن نیز می تواند با ادغام با دانش مکانی و تفکر فضایی بزرگ شود.
درست مانند هر موضوع نوظهوری که در چندین رشته قرار دارد، توسعه GeoAI سه مرحله را طی کرده است: (1) وارد کردن ساده هوش مصنوعی به جغرافیا. در این مرحله، تحقیقات بیشتر اکتشافی است و شامل استفاده مستقیم از روشهای هوش مصنوعی موجود توسط کاربردهای مکانی میشود. هدف واقعاً آزمایش امکان سنجی در ترکیب این دو زمینه است. (2) انطباق هوش مصنوعی از طریق بهبود روش شناختی. این مرحله چالشهای بکارگیری و تطبیق هوش مصنوعی را برای کمک به حل بهتر انواع مختلف مشکلات جغرافیایی شناسایی میکند. (3) صادراتهوش مصنوعی الهام گرفته از جغرافیا به علوم کامپیوتر و سایر زمینه ها بازگشت. در این مرحله، ما دانش عمیقی در مورد نحوه عملکرد هوش مصنوعی و نحوه استفاده از آن به دست خواهیم آورد و با تزریق اصول فضایی، مانند همبستگی خودکار فضایی و ناهمگنی فضایی، بر ساخت مدلهای هوش مصنوعی جدید تمرکز خواهیم کرد. -هوش مصنوعی هدف که می تواند توسط بسیاری از رشته ها اتخاذ شود. فاز 2 و فاز 3 شالوده نظری و روش شناختی GeoAI را خواهند ساخت.
همچنین مهم است که دامنه روش شناختی GeoAI را تشخیص دهیم. امروزه محققان اغلب از GeoAI زمانی استفاده می کنند که مطالعات جغرافیایی آنها از داده کاوی، یادگیری ماشینی و سایر روش های سنتی هوش مصنوعی استفاده می کند. تجزیه و تحلیل رگرسیون و دیگر روشهای یادگیری ماشین کم عمق برای چندین دهه وجود داشتهاند، اما این تکنیکهای یادگیری ماشین عمیق، مانند شبکه عصبی کانولوشن (CNN) است که مورد توجه محققان هوش مصنوعی قرار گرفته و باعث رشد جامعه GeoAI شده است. بنابراین، در حالی که تعریف گستردهای از تکنیکهای GeoAI باید شامل روشهای سنتیتر هوش مصنوعی و یادگیری ماشین باشد، عناصر اصلی آن باید یادگیری عمیق و دیگر پیشرفتهای اخیر در هوش مصنوعی باشد که در آن مراحل مهم یادگیری، مانند انتخاب ویژگیها، بهجای دستی انجام میشوند. . علاوه بر این،
هدف این مقاله بررسی روشها و کاربردهای مهم در GeoAI است. ما ابتدا تکنیکهای کلیدی هوش مصنوعی از جمله شبکههای عصبی پیشخور، CNN، شبکههای عصبی بازگشتی (RNN)، شبکههای عصبی حافظه بلندمدت و کوتاهمدت (LSTM) و مدلهای ترانسفورماتور را بررسی کردیم. این مدلها برخی از محبوبترین مدلهای شبکه عصبی را نشان میدهند که بر تحقیقات مدرن هوش مصنوعی تسلط دارند. ما بررسی را پیرامون استفاده از دادههای مکانی سازماندهی میکنیم. از آنجایی که ادبیات GeoAI به سرعت در حال رشد است، هر موضوعی را نمی توان در یک مقاله پوشش داد. برای اطمینان از عمق و وسعت این بررسی، ما به کارهای پیشگامانه در هوش مصنوعی و یادگیری عمیق و کارهای اساسی که نشان دهنده مهم ترین نقاط عطف در گسترش و به کارگیری هوش مصنوعی در حوزه جغرافیایی هستند، اولویت می دهیم. ما همچنین بررسی خود را بر روی تحقیقاتی متمرکز کردیم که از تکنیکهای جدید یادگیری ماشین، بهویژه یادگیری عمیق استفاده میکنند، در حالی که برای تجزیه و تحلیل مقایسهای، روشهای یادگیری ماشینی کم عمق را لمس میکنند. ما امیدواریم که این مقاله به عنوان یک مقاله جهتدهنده اساسی برای GeoAI باشد که پیشرفت تحقیقات GeoAI، به ویژه در وظایف تجزیه و تحلیل تصویر جغرافیایی و بینایی ماشین را خلاصه میکند.
یادآوری این مقاله به شرح زیر سازماندهی شده است: بخش 2 به طور خلاصه انواع مختلف داده های بزرگ جغرافیایی، به ویژه داده های ساختاری و تصویری را شرح می دهد. بخش 3 روش شناسی رایج در تحقیقات GeoAI را معرفی می کند. بخش 4 برنامه های مختلفی را که GeoAI فعال می کند بررسی می کند. بخش 5 مقاله را خلاصه می کند و راه های پیش رو برای این حوزه تحقیقاتی هیجان انگیز را مورد بحث قرار می دهد.
2. داده های بزرگ جغرافیایی برای تجزیه و تحلیل تصویر و نقشه برداری
-
تصاویر سنجش از دور
تصاویر سنجش از دور یکی از مهمترین و پرکاربردترین منابع داده در جغرافیا است. این شامل اطلاعات استخراج شده از سطح زمین است و نه تنها ویژگی های ساخته شده توسط انسان، بلکه ویژگی های طبیعی را نیز در بر می گیرد. پیشرفتهای اخیر در مقیاس بزرگ رصد زمین و وسایل نقلیه هوانوردی بدون سرنشین (UAV) منجر به مزایای زیادی برای استفاده از تصاویر سنجش از دور، مانند تصاویر ماهوارهای و هواپیماهای بدون سرنشین، برای پشتیبانی از برنامههای کاربردی در مقیاسهای مختلف جغرافیایی میشود [ 18 ].
-
سرویس تماشای خیابان گوگل
در دسترس بودن اخیر تصاویر سطح خیابان از شرکتهای با فناوری پیشرفته، مانند Google و Tencent، به روشی مفید برای استخراج اطلاعات درباره جهان بدون قدم گذاشتن در آن تبدیل شده است [ 19 ]. برخلاف تصاویر سنجش از دور، دادههای نمای خیابان مشاهدات انسان محور بیشتری را ارائه میدهند که نه تنها محیط فیزیکی بلکه محیط اجتماعی را نیز در بر میگیرد [ 20 ]، و همچنین سایر اطلاعات دقیق مرتبط با شهرها، مانند تحرک انسانی و اجتماعی-اقتصادی. روندها [ 21 ]. با تولید بیشتر و بیشتر تصاویر نمای خیابان و توسعه تکنیک های یادگیری ماشینی، داده های تصویر خیابانی به طور فزاینده ای مورد استفاده قرار می گیرند.
-
داده های ژئو-علمی
مطالعه پدیده های فیزیکی زمین برای وضعیت انسان مهم است. از درک تا پیشبینی، به عنوان مثال، آب و هوا و سیل، تا نظارت بر محیطزیست، تحقیقات جغرافیایی نه تنها افراد را از قرار گرفتن در معرض رویدادهای شدید محافظت میکند، بلکه توسعه پایدار جامعه را نیز تضمین میکند. به طور کلی دو نوع داده در تحقیقات سیستم های زمین استفاده می شود: داده های حسگر و داده های شبیه سازی. داده های حسگر، مانند دما و رطوبت، به دلیل پیشرفت در فناوری سخت افزار به طور گسترده ای در دسترس قرار گرفتند [ 16 ، 22 ]]. از سوی دیگر، داده های شبیه سازی خروجی مدل هایی هستند که اطلاعات مربوط به جو زمین، اقیانوس ها و سایر سیستم ها را جذب می کنند. هر دو نوع داده ساختاری هستند، اما با تصاویر طبیعی متفاوت هستند و بنابراین منجر به چالش های منحصر به فردی می شوند. به عنوان مثال، آنها معمولا ابعاد بالا و در مقادیر عظیم هستند. اندازه آنها می تواند در سطوح ترا تا پتا بایت با ده ها متغیر ژئوفیزیکی یا محیطی باشد، در حالی که یک مجموعه داده تصویر معمولی معمولاً در مقیاس گیگابایت است و فقط سه کانال (RGB) دارد. علاوه بر این، حسگرهای مختلف ممکن است وضوح مکانی و زمانی متفاوتی داشته باشند که چالشهای یکپارچهسازی دادهها را افزایش میدهد. برای مقابله با این چالش ها، مطالعات مختلفی با کاربردهای مختلف توسعه یافته است.
نقشه های توپوگرافی حاوی جزئیات ریزدانه و نمایش کمی از سطح زمین و ویژگی های آن، طبیعی و مصنوعی است. در چنین نقشهای، ویژگیها برچسبگذاری میشوند و تغییرات ارتفاعی مشروح میشوند. نقشههای توپوگرافی چندین عنصر را ادغام میکنند (مثلاً ویژگیهای متمایز شده بر اساس رنگ و نمادها، برچسبهایی برای نام ویژگی، و خطوط خطوطی که تغییرات زمین را نشان میدهند) برای ارائه یک دید جامع در مورد زمین. سازمان زمین شناسی ایالات متحده برای ایجاد نقشه توپوگرافی به نام US Topo که کل ایالات متحده را پوشش می دهد، به خوبی شناخته شده است [ 23 ].
در مقایسه با استفاده از سایر مجموعه داده ها، نقشه برداری توپوگرافی اغلب تمرکز اصلی دولت است، مانند سازمان زمین شناسی ایالات متحده (USGS). یوزری و همکاران [ 24 ] یک بررسی کامل از برنامه های GeoAI مرتبط در نقشه برداری توپوگرافی ارائه کرده است، بنابراین ما بر بررسی برنامه با استفاده از تصاویر سنجش از راه دور، تصاویر نمای خیابان، و داده های علم زمین تمرکز خواهیم کرد.
3. روش شناسی
در این بررسی، ما مقالات را بر اساس استفاده از دادهها به سه نوع دستهبندی کردیم: تصاویر سنجش از دور، تصاویر نمای خیابان و دادههای علم زمین. هر کدام ویژگی ها و روال های پردازش خاص خود را دارند، بنابراین تکنیک ها و روش های مربوطه متفاوت است. بر اساس ویژگیهای دادهها، ما استراتژیهای مختلفی را برای انتخاب و بررسی ادبیات اتخاذ کردیم. تصاویر سنجش از دور از دهه 1960 یا قبل از آن مورد استفاده قرار گرفته است، از این رو، تکنیک های مختلفی قبل از یادگیری ماشین و GeoAI تبدیل به تکنیک های رایج شده است، توسعه یافته و برای چنین داده هایی به کار گرفته شده است، که منجر به حجم وسیعی از آثار در حوزه تحلیل تصویر سنجش از دور می شود. برای انجام این بررسی، انتشارات مربوطه را بر اساس وظایفشان دسته بندی کردیم، به عنوان مثال، طبقه بندی تصویر و تقسیم بندی اشیا. علاوه بر معرفی برنامه های کاربردی (مثلا طبقهبندی کاربری زمین) از هر کار، ما همچنین استفاده از روشهای مرسوم و روشهای پیشرفتهتر GeoAI/یادگیری عمیق را توصیف میکنیم، و همچنین تفاوتهای آنها را در یک جدول خلاصه میکنیم. برای روشهای مرسوم، ما انتشاراتی را با تعداد بالا نقل قول از Google Scholar انتخاب کردیم (~40 مقاله برتر با استفاده از کلمات کلیدی جستجو، مانند «طبقهبندی تصاویر سنجش از دور») در هر حوزه کاری برگردانده شدند. برای روشهای یادگیری عمیق، ما انتشارات موفقیتآمیز را از نظر توسعه مدل جدید در علوم رایانه بر اساس بهترین دانش و تعداد استناد از Google Scholar انتخاب کردیم. کاربرد روش های یادگیری عمیق در تجزیه و تحلیل تصویر سنجش از دور در ادبیات جدیدتر (2019-2022) مورد بررسی قرار می گیرد تا مخاطبان را از پیشرفت های اخیر در این زمینه آگاه نگه دارد. ما همچنین استفاده از روشهای مرسوم و روشهای پیشرفتهتر GeoAI/یادگیری عمیق را شرح میدهیم، و همچنین تفاوتهای آنها را در یک جدول خلاصه میکنیم. برای روشهای مرسوم، ما انتشاراتی را با تعداد بالا نقل قول از Google Scholar انتخاب کردیم (~40 مقاله برتر با استفاده از کلمات کلیدی جستجو، مانند «طبقهبندی تصاویر سنجش از دور») در هر حوزه کاری برگردانده شدند. برای روشهای یادگیری عمیق، ما انتشارات موفقیتآمیز را از نظر توسعه مدل جدید در علوم رایانه بر اساس بهترین دانش و تعداد استناد از Google Scholar انتخاب کردیم. کاربرد روش های یادگیری عمیق در تجزیه و تحلیل تصویر سنجش از دور در ادبیات جدیدتر (2019-2022) مورد بررسی قرار می گیرد تا مخاطبان را از پیشرفت های اخیر در این زمینه آگاه نگه دارد. ما همچنین استفاده از روشهای مرسوم و روشهای پیشرفتهتر GeoAI/یادگیری عمیق را شرح میدهیم، و همچنین تفاوتهای آنها را در یک جدول خلاصه میکنیم. برای روشهای مرسوم، ما انتشاراتی را با تعداد بالا نقل قول از Google Scholar انتخاب کردیم (~40 مقاله برتر با استفاده از کلمات کلیدی جستجو، مانند «طبقهبندی تصاویر سنجش از دور») در هر حوزه کاری برگردانده شدند. برای روشهای یادگیری عمیق، ما انتشارات موفقیتآمیز را از نظر توسعه مدل جدید در علوم رایانه بر اساس بهترین دانش و تعداد استناد از Google Scholar انتخاب کردیم. کاربرد روش های یادگیری عمیق در تجزیه و تحلیل تصویر سنجش از دور در ادبیات جدیدتر (2019-2022) مورد بررسی قرار می گیرد تا مخاطبان را از پیشرفت های اخیر در این زمینه آگاه نگه دارد. و همچنین تفاوت های آنها را در یک جدول خلاصه کنید. برای روشهای مرسوم، ما انتشاراتی را با تعداد بالا نقل قول از Google Scholar انتخاب کردیم (~40 مقاله برتر با استفاده از کلمات کلیدی جستجو، مانند «طبقهبندی تصاویر سنجش از دور») در هر حوزه کاری برگردانده شدند. برای روشهای یادگیری عمیق، ما انتشارات موفقیتآمیز را از نظر توسعه مدل جدید در علوم رایانه بر اساس بهترین دانش و تعداد استناد از Google Scholar انتخاب کردیم. کاربرد روش های یادگیری عمیق در تجزیه و تحلیل تصویر سنجش از دور در ادبیات جدیدتر (2019-2022) مورد بررسی قرار می گیرد تا مخاطبان را از پیشرفت های اخیر در این زمینه آگاه نگه دارد. و همچنین تفاوت های آنها را در یک جدول خلاصه کنید. برای روشهای مرسوم، ما انتشاراتی را با تعداد بالا نقل قول از Google Scholar انتخاب کردیم (~40 مقاله برتر با استفاده از کلمات کلیدی جستجو، مانند «طبقهبندی تصاویر سنجش از دور») در هر حوزه کاری برگردانده شدند. برای روشهای یادگیری عمیق، ما انتشارات موفقیتآمیز را از نظر توسعه مدل جدید در علوم رایانه بر اساس بهترین دانش و تعداد استناد از Google Scholar انتخاب کردیم. کاربرد روش های یادگیری عمیق در تجزیه و تحلیل تصویر سنجش از دور در ادبیات جدیدتر (2019-2022) مورد بررسی قرار می گیرد تا مخاطبان را از پیشرفت های اخیر در این زمینه آگاه نگه دارد. مانند “طبقه بندی تصاویر سنجش از دور”) در هر ناحیه کاری. برای روشهای یادگیری عمیق، ما انتشارات موفقیتآمیز را از نظر توسعه مدل جدید در علوم رایانه بر اساس بهترین دانش و تعداد استناد از Google Scholar انتخاب کردیم. کاربرد روش های یادگیری عمیق در تجزیه و تحلیل تصویر سنجش از دور در ادبیات جدیدتر (2019-2022) مورد بررسی قرار می گیرد تا مخاطبان را از پیشرفت های اخیر در این زمینه آگاه نگه دارد. مانند “طبقه بندی تصاویر سنجش از دور”) در هر ناحیه کاری. برای روشهای یادگیری عمیق، ما انتشارات موفقیتآمیز را از نظر توسعه مدل جدید در علوم رایانه بر اساس بهترین دانش و تعداد استناد از Google Scholar انتخاب کردیم. کاربرد روش های یادگیری عمیق در تجزیه و تحلیل تصویر سنجش از دور در ادبیات جدیدتر (2019-2022) مورد بررسی قرار می گیرد تا مخاطبان را از پیشرفت های اخیر در این زمینه آگاه نگه دارد.
دومین حوزه متمرکز بررسی، تصاویر نمای خیابان است که استفاده از آن در مقایسه با تصاویر سنجش از دور سابقه نسبتاً کوتاهی دارد. تکنیکهای جمعآوری تصاویر نمای خیابان در سال 2001 آغاز شد و دادهها در حدود سال 2010 برای تحقیق در دسترس قرار گرفتند. از آنجایی که شکل جدیدی از دادهها است، مطالعات کمتری در این زمینه نسبت به تصاویر سنجش از دور وجود دارد. تحقیقاتی که میتوانند از تصاویر نمای خیابان سود ببرند، معمولاً شامل فعالیتهای انسانی و تجزیه و تحلیل محیط شهری میشوند که معمولاً به مصاحبههای حضوری یا معاینات در محل نیاز دارند. تصاویر نمای خیابان راه جدیدی برای به دست آوردن اطلاعات در مقیاس بزرگ ارائه می دهد و GeoAI و یادگیری عمیق استخراج خودکار اطلاعات را از چنین داده هایی برای کاهش تلاش انسان و امکان تجزیه و تحلیل در مقیاس بزرگ امکان پذیر می کند. در اینجا، ما بررسی خود را بر اساس برنامه ها دسته بندی می کنیم (به عنوان مثال، کمی سازی ویژگی های همسایگی) و بحث کنید که چگونه GeoAI و یادگیری عمیق می توانند از چنین برنامه هایی پشتیبانی کنند. از آنجایی که جدیدترین تحقیقات در این زمینه پس از سال 2017 منتشر شده است، ما محدوده زمانی را هنگام انجام بررسی مشخص نکردیم.
سومین حوزه تمرکز شامل برنامه های کاربردی GeoAI داده های علم زمین است. در مقایسه با دادههای دو دسته دیگر، دادههای زمینعلمی ساختار بسیار پیچیدهتری دارند و زمانی که دادهها از حوزههای مختلف علوم زمین میآیند، ناهمگن هستند. به همین دلیل، روشهای مورد استفاده برای تجزیه و تحلیل چنین دادههایی نیز واریانسهای زیادی را نشان میدهند، حتی اگر وظایف یکسانی را در برنامههای مختلف انجام دهند. بنابراین، ما انتشارات را بر اساس برنامه های کاربردی دامنه دسته بندی کردیم. به طور سنتی، دانشمندان به شدت به مدلهای مبتنی بر فیزیک برای درک پدیدههای ژئوفیزیکی با استفاده از دادههای ژئو-علمی تکیه میکنند. به این ترتیب، داده ها بسیار ساختار یافته هستند و می توانند به عنوان داده های نوع تصویر نمایش داده شوند. در سالهای اخیر، GeoAI و یادگیری عمیق برای به دست آوردن بینش های جدید از این داده ها به کار گرفته شده اند و آنها به عنوان یک رویکرد مکمل برای مدل های مبتنی بر فیزیک مورد استفاده قرار می گیرند. بررسی رویکردها یا ابزارهای سنتی بر اساس محبوبیت و پذیرش گسترده آنها در مطالعه و پیشبینی در مقیاس بزرگ است و بررسی برنامههای جدیدتر یادگیری عمیق برای مقاصد مقایسه ارائه شده است.
4. بررسی روشهای رایج شبکه عصبی: از یادگیری ماشینی کم عمق تا یادگیری عمیق
در این بخش، روشهای رایج و پرکاربرد هوش مصنوعی، بهویژه مدلهای یادگیری عمیق را بررسی میکنیم. پنج معماری اصلی شبکه عصبی، از جمله شبکه عصبی کاملا متصل (FCN) [ 25 ]، که یک جزء اساسی در بسیاری از معماریهای شبکه عصبی مبتنی بر یادگیری عمیق است، معرفی شدهاند. شبکه عصبی کانولوشنال (CNN) [ 17 ] برای مشکلات فضایی. مدل شبکه عصبی بازگشتی (RNN) [ 26 ] و LSTM (حافظه بلند مدت، کوتاه مدت) شبکه عصبی [ 26 ، 27 ] برای توالی زمانی. و همچنین مدل های ترانسفورماتور [ 28]، که به طور فزاینده ای برای کارهای تجزیه و تحلیل بینایی و تصویر استفاده می شود. این روش ها همچنین به عنوان پایه ای برای توسعه دستور کار تحقیقاتی برای توسعه روش شناختی در GeoAI عمل می کنند.
4.1. شبکه عصبی کاملاً متصل (FCN)
مدلهای شبکه عصبی مصنوعی سنتی پایه و اساس معماریهای شبکه عصبی پیشرفته هستند. به عنوان مثال، شبکه عصبی پیشخور ( شکل 2الف) شامل قرار دادن نورون های مصنوعی است که هر کدام یک ویژگی یا یک گره پنهان را در چندین لایه نشان می دهند. هر نورون در لایه قبلی با هر نورون لایه بعدی ارتباط دارد. این نوع شبکه عصبی، شبکه عصبی کاملا متصل نیز نامیده می شود و قادر است روابط غیر خطی بین ورودی و خروجی را شناسایی کند. با این حال، آنها از دو محدودیت عمده رنج می برند: (1) نیاز به تعریف دستی تعداد گره های ورودی، یا متغیرهای مستقل، که همچنین ویژگی های مهمی هستند که به طبقه بندی نهایی کمک می کنند و (2) به دست آوردن یک قابلیت پیش بینی خوب، شبکه باید چندین لایه شبکه عصبی را روی هم بگذارد تا یک رابطه پیچیده و غیرخطی بین متغیر مستقل (ورودی) و متغیر وابسته (خروجی) یاد بگیرد. فرآیند یادگیری برای چنین شبکه پیچیده ای اغلب از نظر محاسباتی بسیار فشرده است و با استفاده از آن، همگرایی بر روی یک راه حل بهینه دشوار است. برای مقابله با این چالش ها، مدل های شبکه عصبی با پردازش موازی جدیدتری توسعه یافته اند که یکی از آنها CNN است. توجه داشته باشید که مدلهای سنتی، بهویژه شبکههای عصبی کاملاً متصل، یک جزء ضروری در بسیاری از معماریهای یادگیری عمیق برای طبقهبندی باقی میمانند. استخراج ویژگی های دستی با پردازش خودکار که توسط مدل های جدیدتر به دست آمده است جایگزین می شود. و CNN یکی از آنهاست. توجه داشته باشید که مدلهای سنتی، بهویژه شبکههای عصبی کاملاً متصل، یک جزء ضروری در بسیاری از معماریهای یادگیری عمیق برای طبقهبندی باقی میمانند. استخراج ویژگی های دستی با پردازش خودکار که توسط مدل های جدیدتر به دست آمده است جایگزین می شود. و CNN یکی از آنهاست. توجه داشته باشید که مدلهای سنتی، بهویژه شبکههای عصبی کاملاً متصل، یک جزء ضروری در بسیاری از معماریهای یادگیری عمیق برای طبقهبندی باقی میمانند. استخراج ویژگی های دستی با پردازش خودکار که توسط مدل های جدیدتر به دست آمده است جایگزین می شود. و CNN یکی از آنهاست.
4.2. شبکه عصبی کانولوشنال (CNN)
CNN یک پیشرفت در هوش مصنوعی است که یادگیری ماشینی را با داده های بزرگ و محاسبات موازی امکان پذیر می کند. ظهور CNN ( شکل 2ب) وابستگی متقابل بالا بین نورون های مصنوعی در یک FCN را با اعمال یک عملیات کانولوشن حل می کند، که از یک پنجره کشویی برای محاسبه حاصل ضرب نقطه بین بخش های مختلف (در پنجره کشویی) داده های ورودی و فیلتر کانولوشن با اندازه یکسان استفاده می کند. نتیجه نقشه ویژگی نامیده می شود و ابعاد آن به طراحی فیلتر کانولوشن بستگی دارد. یک لایه کانولوشن اغلب با یک لایه max-pooling متصل میشود، که نمونهبرداری پایین را انجام میدهد تا حداکثر مقدار را در زیرمنطقههای 2 در 2 غیر همپوشانی در نقشه ویژگی انتخاب کند. این عملیات تضمین می کند که ویژگی برجسته حفظ می شود. در عین حال، اندازه نقشه ویژگی را کاهش می دهد و در نتیجه هزینه محاسبات را کاهش می دهد. پس از انباشتن چندین لایه CNN، سپس ویژگیهای سطح پایینی که در چند لایه اول استخراج میشوند، میتوانند به صورت معنایی ترکیب شوند تا ویژگیهای سطح بالا را ایجاد کنند که بهتر میتوانند یک شی را از دیگران تشخیص دهند. CNN را می توان به عنوان یک استخراج کننده ویژگی های همه منظوره مشاهده کرد.
بسته به انواع مختلف دادههایی که یک CNN میتواند بگیرد، میتوان آنها را بهعنوان یکبعدی CNN، 2D CNN، یا 3D CNN دستهبندی کرد. CNN 1D یک فیلتر یک بعدی را اعمال می کند که در امتداد فضای برداری 1 بعدی می لغزد. بنابراین برای پردازش داده های متوالی، مانند متن زبان طبیعی یا بخش صوتی مناسب است. در مقایسه، CNN 2 بعدی فیلتری را با اندازه x × y n اعمال می کند، که در آن x و y ابعاد فیلتر کانولوشن دو بعدی و n تعداد فیلترهای اعمال شده برای استخراج ویژگی های مختلف، به عنوان مثال، لبه های افقی و لبه های عمودی فیلتر دوبعدی فقط در حوزه فضایی اسلاید می کند. هنگامی که دادههای دو بعدی (تصویر) را به دادههای حجمی سهبعدی گسترش میدهید، مانند کلیپهای ویدیویی که در آنها بعد z سوم بعد زمانی است، فیلتر بهطور متناظر به صورت سهبعدی است و در تمام جهات x، y، و z اسلاید میشود.
پس از استخراج ویژگی، مدل را می توان برای کاربردهای مختلف بیشتر گسترش داد. برای پردازش تصویر و بینایی کامپیوتری، مدل را می توان به یک لایه کاملاً متصل برای طبقه بندی سطح تصویر یا به یک شبکه پیشنهادی منطقه برای تشخیص یا تقسیم بندی اشیا متصل کرد. برای پردازش زبان طبیعی (NLP)، اسناد متنی را می توان به عنوان ماتریس های فراوانی کلمه نشان داد و تبدیل کرد و سپس CNN را می توان برای مدل سازی موضوع و سایر وظایف تجزیه و تحلیل متن، مانند اندازه گیری شباهت معنایی، مورد استفاده قرار داد. برای پردازش دادههای سهبعدی با ویژگیهای فضا و زمان، یا دادههای LiDAR سه بعدی که اشیاء سهبعدی را به تصویر میکشند، میتوان از CNN سه بعدی برای تشخیص حرکت یا تشخیص اشیاء سه بعدی استفاده کرد. به دلیل توانایی برجسته آن در استخراج ویژگی های متمایز و استراتژی جدید آن در تقسیم عملیات جهانی به چندین عملیات محلی، یک CNN عملکرد بسیار بهبود یافته ای در دقت و کارایی در مقایسه با شبکه های عصبی سنتی به دست می آورد. بنابراین به یک بلوک ساختمانی برای بسیاری از مدل های یادگیری عمیق تبدیل می شود.
4.3. شبکه عصبی مکرر (RNN)
در حالی که CNN ها کاربرد گسترده ای پیدا کرده اند، به ویژه در بینایی کامپیوتری و پردازش تصویر، آنها در انواع مشکلاتی که می توانند حل کنند محدود هستند. از آنجا که یک CNN معمولی یک ورودی با اندازه ثابت می گیرد و یک خروجی با اندازه ثابت ایجاد می کند، نمی تواند یک سری از داده ها را با وابستگی متقابل بین مجموعه داده ها در برش های زمانی مختلف پردازش کند. برای این منظور، RNN توسعه داده شده است تا یک حالت پنهان را اضافه کند تا زمینه بین ورودی و خروجی قبلی را ثبت کند. به عبارت دیگر، خروجی نه تنها تابعی با ورودی در “زمان” i است (اگر وابستگی سری ورودی ها را زمان در نظر بگیریم)، همچنین به اطلاعات زمینه ای ارائه شده توسط حالت پنهان در زمان i بستگی دارد. 1. شکل 2c یک معماری معمولی از یک RNN را نشان می دهد. همانطور که در شکل 2 a با دو گره خروجی نشان داده شده است، هر گره حالت پنهان از یک NN پیشروی استفاده می کند. در مثال در شکل 2 c، RNN شامل زنجیره ای از سه حالت پنهان است ( h (0) یک حالت پنهان از پیش تعریف شده است). این بدان معناست که در طول آموزش، RNN یاد خواهد گرفت که بر اساس ورودی فعلی خود و حالت پنهان به خاطر سپردن اطلاعات متنی از دو حالت قبلی، تصمیم بگیرد.
مشابه CNN 2 بعدی، که از فیلتر یکسانی برای انجام کانولوشن در مناطق فرعی مختلف داده های دو بعدی استفاده می کند، RNN نیز از وزن های مشابه در < استفاده می کند. دبلیوایکسدبلیوایکس، دبلیوyدبلیو�، دبلیوساعتدبلیوساعت> برای محاسبه در همه حالات تکرار شونده. معماری یک RNN را می توان با توجه به نیازهای برنامه های مختلف تغییر داد. به عنوان مثال، یک مدل یک به چند (یک ورودی، بسیاری از خروجی ها) می تواند برای یادگیری عنوان از یک تصویر استفاده شود. یک مدل چند به یک می تواند برای طبقه بندی کنش از یک کلیپ ویدیویی استفاده شود. و از مدل چند به چند می توان برای ترجمه زبان استفاده کرد. در نهایت، یک مدل RNN یک به یک به یک شبکه عصبی پیشخور سادهسازی میشود. با افزودن اتصالات دوطرفه بین گره های ورودی، پنهان و خروجی، می توان یک RNN دو جهته ایجاد کرد تا زمینه را نه تنها از حالت های قبلی بلکه از حالت های آینده نیز بگیرد.
یک مدل RNN همچنین میتواند با افزایش طول زنجیره حالتهای پنهان با افزودن عمق به انتقال بین لایههای ورودی به پنهان، پنهان به پنهان و پنهان به خروجی به یک RNN عمیق تبدیل شود [ 29 ]. به طور کلی تشخیص داده شده است که یک RNN عمیق بهتر از یک RNN کم عمق عمل می کند زیرا توانایی یک RNN عمیق برای گرفتن وابستگی های متقابل طولانی مدت در سری ورودی دارد.
4.4. حافظه بلند مدت کوتاه مدت (LSTM)
RNN عمیق می تواند حافظه بلند مدت را ضبط کند و RNN کم عمق حافظه کوتاه مدت را در سری ورودی ضبط می کند. با این حال، حافظه ای که آنها می توانند ضبط کنند فقط در یک طول ثابت است. این توانایی RNN را برای ثبت پویا وقایع با ریتمهای زمانی متفاوت محدود میکند و بر دقت پیشبینی آن تأثیر منفی میگذارد. مدل های LSTM برای رفع این محدودیت توسعه داده شده اند. همانطور که از نامش پیداست، LSTM این توانایی را دارد که به طور انعطاف پذیر تعیین کند که آیا و چه زمانی حافظه کوتاه مدت یا حافظه بلند مدت در تصمیم گیری اهمیت بیشتری دارد. این امر با معرفی یک حالت سلولی علاوه بر حالت های پنهان در RNN های معمولی به دست می آید. حالت های سلولی حافظه بلند مدت را در مورد الگوهای رویداد حفظ می کنند و حالت های پنهان حاوی حافظه کوتاه مدت هستند ( شکل 2)د). برای تعیین اینکه کدام قسمت از حافظه باید در نظر گرفته شود تا تشخیص الگوی زمانی دقیقتر انجام شود، LSTM همچنین سه گیت را معرفی میکند: یک دروازه ورودی، یک دروازه فراموشی و یک دروازه خروجی. دروازه ورودی مقدار اطلاعات ورودی از حالت قبلی را که باید در یک فرآیند آموزشی تکراری به حالت فعلی برود را تعیین می کند. به عبارت دیگر، میزان استفاده از اطلاعات جدید را تعیین می کند. یک دروازه فراموش تصمیم می گیرد که کدام قسمت از حافظه اهمیت کمتری دارد و بنابراین باید فراموش شود. و دروازه خروجی تصمیم میگیرد که چگونه اطلاعات به دست آمده جدید را با اطلاعات فیلتر شده از حافظه ترکیب کند تا یک پیشبینی دقیق در مورد وضعیت آینده ایجاد کند.
LSTM به دلیل توانایی اش در گرفتن وابستگی های طولانی مدت، به طور گسترده برای پیش بینی توالی زمانی استفاده شده است. به عنوان مثال، یک سری زمانی از تصاویر ماهوارهای میتواند به عنوان ورودی LSTM باشد و مدل پیشبینی میکند که چگونه کاربری و پوشش زمین در آینده تغییر خواهد کرد [ 30 ]. بسته به کاربرد، ورودی LSTM میتواند دادههای توالی زمانی اصلی یا یک توالی ویژگی استخراج شده با استفاده از مدلهای CNN ذکر شده در بالا باشد. یکی از کاربردهای جالب LSTM در تجزیه و تحلیل تصویر، استفاده از آن برای تشخیص اشیا است [ 31]. اگرچه یک تصویر منفرد حاوی واریانس زمانی نیست، تصویر دو بعدی را می توان با ترتیب اسکن، مانند پرایم ردیف، به داده های توالی 1 بعدی سریال تبدیل کرد. در یک برنامه تشخیص اشیاء، اگرچه اشیاء دوبعدی پس از سریالسازی به قطعات تقسیم میشوند، LSTM میتواند دنبالههای 1 بعدی متعلق به همان شی را “پیوند” کند و به دلیل توانایی آن در گرفتن وابستگی طولانی مدت، پیشبینیهای مناسبی انجام دهد. . هنگامی که LSTM در ترکیب با توابع هدف جدید، مانند CTC (طبقه بندی زمانی ارتباطی) استفاده می شود، می تواند به جای برچسب در هر فریم، روی یک برچسب ضعیف پیش بینی کند [ 27 ]. این به طور قابل توجهی هزینه برچسب گذاری را کاهش می دهد و قابلیت استفاده از چنین مدل هایی را در تجزیه و تحلیل داده محور افزایش می دهد.
LSTM همچنین می تواند برای پردازش اسناد متنی برای پیش بینی توالی متن پیش رو یا انجام تقسیم بندی گفتار استفاده شود. با این حال، این برنامه ها تمرکز این مقاله نیستند.
4.5. تبدیل کننده
یکی دیگر از معماری بسیار هیجان انگیز شبکه عصبی، ترانسفورماتور است که توسط تیم هوش مصنوعی گوگل در سال 2017 توسعه یافت [ 28 ]]. این مبتنی بر معماری رمزگذار و رمزگشا است و توانایی تبدیل یک دنباله ورودی به یک دنباله خروجی را دارد. این به عنوان یادگیری توالی به دنباله نیز شناخته می شود. ترانسفورماتورها به طور فزاینده ای در پردازش زبان طبیعی، ترجمه ماشینی، پاسخگویی به سوالات و وظایف مربوط به پردازش داده های متوالی استفاده شده اند. متفاوت از سایر مدلهای پردازش دادههای متوالی، مانند RNN، یک مدل ترانسفورماتور حاوی ماژولهای تکراری نیست، به این معنی که دادههای ورودی نیازی به پردازش متوالی ندارند، در عوض میتوانند به صورت دستهای پردازش شوند. یک مفهوم اصلی که این پردازش دسته ای یا موازی را امکان پذیر می کند مکانیسم توجه است. هنگامی که یک توالی ورودی داده می شود، به عنوان مثال، دنباله ای از کلمات، ماژول توجه به خود ابتدا همبستگی بین همه جفت کلمات را استخراج می کند. برای یک کلمه معین، این به معنای محاسبه وزن برای دانستن اینکه چگونه این کلمه تحت تأثیر همه کلمات دیگر در دنباله است. این وزن ها در محاسبات زیر برای ایجاد یک بردار با ابعاد بالا برای نمایش هر کلمه (عنصر) در دنباله ورودی گنجانده می شوند. این به عنوان پیشرفت رمزگذاری نیز شناخته می شود. به جای استفاده مستقیم از داده های خام به عنوان ورودی، رمزگذار ابتدا تعبیه ورودی را انجام می دهد تا عناصر دنباله ورودی را به صورت عددی نمایش دهد. علاوه بر این، یک رمزگذاری موقعیتی معرفی شده است تا موقعیت هر عنصر را در دنباله ورودی به ماژول توجه به خود اطلاع دهد. یک لایه پیشخور به ماژول خودتوجهی برای ترجمه ابعاد بردار کدگذاری شده متصل میشود، بنابراین با لایه رمزگذار یا رمزگشای بعدی سازگاری بیشتری دارد.
رمزگشا ( شکل 2ه) دارای معماری مشابه معماری رمزگذار است. دنباله خروجی را به عنوان ورودی می گیرد (در طول فرآیند آموزش) و هم کدگذاری موقعیت و هم جاسازی را در بالای دنباله انجام می دهد. سپس بردارهای تعبیه شده به ماژول توجه ارسال می شوند. در اینجا، ماژول توجه، توجه پنهان نامیده می شود، زیرا محاسبه مقادیر توجه بر اساس همه عناصر دیگر در دنباله نیست. درعوض، از آنجایی که رمزگشا برای پیشبینی عنصر بعدی در دنباله استفاده میشود، محاسبه توجه برای هر عنصر، تنها عناصری را که قبل از آن قرار میگیرند به دنباله میبرد نه همه عناصر موجود در دنباله. بنابراین به این ماژول توجه به خود پوشانده می گویند. علاوه بر این ماژول، رمزگشا همچنین یک ماژول توجه متقاطع را معرفی می کند که توالی ورودی تعبیه شده و توالی خروجی از قبل پیش بینی شده را می گیرد تا به طور مشترک در مورد عنصر آینده پیش بینی کند. پیشبینیها میتوانند برچسبهای منفرد یا چندگانه برای یک مشکل طبقهبندی باشند (یعنی برای پیشبینی اینکه گوینده کیست، با توجه به یک توالی گفتار)، همچنین میتواند یک بردار طول غیر ثابت برای ترجمه ماشینی باشد (یعنی از یک زبان به دیگری، یا از گفتار به متن).
علاوه بر کاربردها در پردازش زبان طبیعی، مدلهای ترانسفورماتور به طور فزایندهای برای تجزیه و تحلیل تصویر و سایر وظایف بینایی ماشین استفاده میشوند. CNN توجه خود را بر روی یک پنجره محلی کوچکتر (معروف به یک میدان پذیرنده کوچکتر) از طریق شبکه عصبی کانولوشنال خود متمرکز می کند. در مقایسه، ترانسفورماتورها می توانند به صورت دینامیکی اندازه یک میدان گیرنده را تعیین کنند و می توانند عملکردی مشابه یا حتی بهتر از CNN داشته باشند [ 32 ]. در سالهای اخیر، Vision Transformers (ViTs) به عنوان “Roaring 20s” در نظر گرفته شدهاند و از مدلهای CNN به عنوان پیشرفتهترین مدلهای طبقهبندی تصویر پیشی میگیرند. با این حال، برای وظایف چالش برانگیزتر تجزیه و تحلیل تصویر، مانند تشخیص اشیا و تقسیم بندی معنایی، CNN ها هنوز عملکرد مطلوب تری نسبت به ترانسفورماتورها نشان می دهند [ 33 ]].
به طور خلاصه، توسعه انقلابی مدلهای جدید شبکه عصبی، به ویژه CNN، و مدلهای LSTM و ترانسفورماتور، مزایای منحصر به فردی در پردازش دادههای توالی و/یا تصویر دارند. بنابراین، هر کدام نقش مهمی در کاربردهای دامنه ایفا می کنند. سایر مدلهای یادگیری ماشین، مانند یادگیری تقویتی عمیق، شبکه متخاصم مولد (GAN) و یادگیری خود نظارت، الگوریتمهای سطح بالایی هستند که بر اساس این ساختارهای شبکه عصبی بنیادی ساخته شدهاند و کاربردهای آنها برای وظایف تصویر و بینایی در ادامه بررسی خواهد شد. بخش بعدی
5. برنامه های کاربردی
5.1. تحلیل تصویر سنجش از دور
برای استخراج اطلاعات از تصاویر، رویکردهای سنتی اغلب از تکنیکهای پردازش تصویر، مانند تشخیص لبه [ 34 ، 35 ]، و استخراج ویژگیهای دست ساز، مانند SIFT (تبدیل ویژگی ثابت مقیاس) [ 36 ]، HOG (هیستوگرام جهتدار ) استفاده میکنند. گرادیان) [ 37 ]، و BoW (کیف کلمات) [ 38 ]. این روش ها به دانش قبلی یا بیشتر نیاز دارند و ممکن است با سناریوهای کاربردی مختلف سازگار نباشند. اخیراً، CNN به دلیل توانایی برتر آن در یادگیری بازنمایی مستقیماً از تصاویر اصلی با دانش قبلی کم یا بدون دانش، ثابت کرده است که یک توصیفگر ویژگی قوی است [ 39 ]]. بسیاری از کارهای پیشرفته فعلی، CNN را به عنوان استخراج کننده ویژگی، به عنوان مثال، برای تشخیص اشیا [ 40 ] و تقسیم بندی معنایی [ 41 ] پذیرفته اند. با این حال، بیشتر این کار از تصاویر صحنه طبیعی گرفته شده از یک دوربین نوری استفاده میکند و چالشهای بیشتری در زمانی که مدلها برای تصاویر سنجش از دور اعمال میشوند، وجود دارد. به عنوان مثال، چنین دادههایی فقط نمای سقف از اشیاء مورد نظر را ارائه میدهند، و پوشش منطقه بزرگ است، اما اشیاء معمولا کوچک هستند. بنابراین، اطلاعات موجود در مورد اشیاء محدود است، به غیر از مسائل مربوط به چرخش، مقیاس، پسزمینه پیچیده و انسداد شی-پسزمینه. بنابراین، هنگام استفاده از مدلهای یادگیری عمیق با تصاویر سنجش از دور، اغلب به گسترش و سفارشیسازی نیاز است.
در مرحله بعد، ما یک سری برنامه کاربردی را معرفی می کنیم که از GeoAI و یادگیری عمیق برای تصاویر سنجش از دور استفاده می کنند. جدول 1 این کاربردها، روش های مورد استفاده و محدودیت های رویکردهای سنتی را خلاصه می کند.
-
طبقه بندی در سطح تصویر
طبقهبندی سطح تصویر شامل پیشبینی محتوا در یک تصویر سنجش از راه دور با یک یا چند برچسب است. این همچنین به عنوان طبقه بندی چند برچسبی (MLC) شناخته می شود. MLC را می توان برای پیش بینی کاربری زمین یا انواع پوشش زمین در یک تصویر سنجش از راه دور استفاده کرد، همچنین می توان از آن برای پیش بینی ویژگی ها، اعم از طبیعی یا ساخت دست انسان، برای طبقه بندی انواع مختلف تصاویر استفاده کرد. در حوزه بینایی کامپیوتر، این یک موضوع بسیار محبوب بوده است و یک حوزه کاربردی اصلی برای CNN بوده است. مجموعه داده های تصویری در مقیاس بزرگ، مانند ImageNet، برای ارائه معیاری برای ارزیابی عملکرد مدل های مختلف یادگیری عمیق [ 42 ] توسعه یافته است.]. در چند سال گذشته شاهد اصلاح مداوم مدلهای CNN برای استفاده برای MLC، بهویژه با تصاویر سنجش از دور بودهایم. مثالها عبارتند از (1) کار پیشگامانه در AlexNet [ 43 ] که با پنج لایه کانولوشن برای استخراج خودکار ویژگیهای مهم تصویر برای پشتیبانی از طبقهبندی تصویر طراحی شده است، و (2) VGG [ 44 ]، که دهها لایه کانولوشن را برای ایجاد پشته میکند. یک CNN عمیق علاوه بر ماژول کانولوشنال، پیشرفت دیگری در CNN، ماژول آغازین است که فیلترهای کانولوشنال را در اندازه های مختلف برای استخراج ویژگی ها در مقیاس های متعدد اعمال می کند [ 45 ]. علاوه بر این، فعال سازی یادگیری باقیمانده در ResNet [ 46] اجازه می دهد تا اطلاعات مفید از لایه های کم عمق نه تنها به لایه بعدی بلافاصله بلکه به لایه های بسیار عمیق تر منتقل شود. این پیشرفت از مشکلات اشباع مدل و بیش از حد برازش که CNN سنتی با آن مواجه می شود، جلوگیری می کند. اگرچه تکنیکهای بهینهسازی مختلف، مانند اتصال متراکم و تنظیم دقیق، برای بهبود بیشتر عملکرد مدل اعمال میشوند [ 47 ، 48 ، 49 ، 50 ]، آنها بر اساس این بلوکهای ساختمانی و پیشرفتهای نقطه عطف این مدلهای CNN هستند.
در تجزیه و تحلیل تصویر سنجش از دور، CNN ها و ترکیب آنها با سایر مدل های یادگیری ماشینی برای پشتیبانی از MLC مورد استفاده قرار می گیرند. کومار و همکاران [ 51 ] 15 مدل CNN را مقایسه کرد و دریافت که معماری های مبتنی بر Inception به بهترین عملکرد در MLC تصاویر سنجش از راه دور دست می یابند. در این مطالعه از مجموعه داده کاربری UC-Merced استفاده شده است [ 52 ]. چندین مدل CNN نیز راهحلهایی را با استفاده از مدلهای شبکه عصبی گراف (GNN) برای طبقهبندی تصویر در مجموعه دادههای مشابه شکست دادند [ 53 ]. این مدلها از یادگیری انتقال بهره میبرند، که شامل آموزش مدلها در مجموعه داده محبوب ImageNet برای یادگیری نحوه استخراج ویژگیهای برجسته تصویر و تنظیم دقیق آنها بر اساس تصاویر سنجش از راه دور در وظایف داده شده است. کار اخیر لی و همکاران. [54 ] همچنین نشان میدهد که استفاده ترکیبی از CNN با GNN علاوه بر این میتواند روابط فضایی-توپولوژیکی را ثبت کند، و بنابراین به یک مدل طبقهبندی تصویر قدرتمندتر کمک میکند.
-
تشخیص اشیا
هدف تشخیص اشیاء شناسایی وجود اشیا از نظر کلاسها و مکانهای جعبه مرزی (BBOX) در یک تصویر است. به طور کلی دو نوع آشکارساز شی وجود دارد: مبتنی بر منطقه و مبتنی بر رگرسیون. مدلهای مبتنی بر منطقه، تشخیص شی را به عنوان یک مشکل طبقهبندی در نظر میگیرند و آن را به سه مرحله تقسیم میکنند: پیشنهاد منطقه، استخراج ویژگی و طبقهبندی. مطالعات یادگیری عمیق مربوطه شامل OverFeat [ 55 ]، Faster R-CNN [ 56 ]، R-FCN [ 57 ]، FPN [ 58 ] و RetinaNet [ 59 ] است.]. مدلهای مبتنی بر رگرسیون مستقیماً پیکسلهای تصویر را به مختصات جعبه مرزی و احتمالات کلاس شی نگاشت میکنند. در مقایسه با چارچوبهای مبتنی بر منطقه، آنها در زمان مدیریت و هماهنگی پردازش دادهها بین اجزای متعدد صرفهجویی میکنند و در برنامههای بلادرنگ مطلوب هستند. برخی از مدل های محبوب از این نوع عبارتند از YOLO [ 60 ، 61 ، 62 ، 63 ]، SSD [ 64 ]، RefineDet [ 65 ] و M2Det [ 66 ].
تشخیص اشیا می تواند طیف وسیعی از کاربردها را در حوزه های علوم اجتماعی و محیطی پیدا کند. می توان از آن برای شناسایی ویژگی های طبیعی و ساخت انسان از تصاویر سنجش از دور برای حمایت از مدیریت محیطی [ 67 ]، برنامه ریزی شهری [ 68 ]، عملیات جستجو و نجات [ 69 ] و بازرسی شرایط زندگی جوامع محروم [ 70 ] استفاده کرد. همچنین کاربردهایی در حوزه هوانوردی پیدا کرده است که در آن تصاویر ماهوارهای برای شناسایی هواپیماهایی که میتوانند به ردیابی فعالیتهای هوایی کمک کنند، و همچنین سایر عوامل محیطی، مانند آلودگی هوا و صوتی ناشی از ترافیک مذکور، استفاده میشود [ 71 ]. CapsNet [ 72] چارچوبی است که امکان تشخیص خودکار اهداف را در تصاویر سنجش از دور برای کاربردهای نظامی فراهم می کند. لی و هسو [ 73 ] R-CNN سریعتر [ 56 ] را گسترش می دهند تا شناسایی ویژگی طبیعی از تصاویر سنجش از راه دور را فعال کند. نویسندگان عملکرد چندین مدل CNN عمیق را ارزیابی کردند و دریافتند که مدلهای بسیار پیچیده و عمیق CNN همیشه بهترین دقت تشخیص را ارائه نمیدهند. در عوض، مدلهای CNN باید با دقت با توجه به ویژگیهای دادههای آموزشی و پیچیدگی اشیا و صحنههای پسزمینه طراحی شوند. مسائل و استراتژیهای دیگری که ممکن است عملکرد تشخیص شی را بهبود بخشد، مانند تشخیص حساس به چرخش [ 74 ، 75 ، 76 ، 77 ، 78 ]، 79 ]، ارتقای کیفیت پیشنهاد [ 80 ، 81 ، 82 ، 83 ]، یادگیری با نظارت ضعیف [ 27 ، 84 ، 85 ، 86 ، 87 ]، تشخیص اشیا چند منبعی [ 88 ، 89 ]، و تشخیص شی در زمان واقعی [ 90 ، 91 ، 92 ] نیز در سالهای اخیر به طور فزاینده ای مورد مطالعه قرار گرفته است [ 93 ].
-
تقسیم بندی معنایی
تقسیم بندی معنایی شامل طبقه بندی پیکسل های تصویر منفرد به یک کلاس خاص است که منجر به تقسیم کل تصویر به مناطق متفاوت معنایی می شود که اشیا یا کلاس های مختلف را نشان می دهد. همچنین نوعی طبقه بندی در سطح پیکسل است. چندین روش برای پشتیبانی از تقسیم بندی معنایی توسعه داده شده است. به عنوان مثال، تقسیمبندی مبتنی بر ناحیه [ 94 ، 95 ] پیکسلها را بر اساس برخی مقادیر آستانه به کلاسهای مختلف جدا میکند. تقسیم بندی مبتنی بر لبه [ 96 ، 97 ] مرز اشیاء را با تشخیص لبه هایی که ناپیوستگی بافت محلی ظاهر می شود، تعریف می کند. تقسیم بندی مبتنی بر خوشه [ 98 ، 99] پیکسل ها را بر اساس معیارهای خاصی مانند شباهت در رنگ یا بافت به خوشه ها تقسیم می کند. روشهای تقسیمبندی مبتنی بر شبکه عصبی اخیر هیجان جدیدی را برای این تحقیق به ارمغان میآورد. این مدلها یک نگاشت تصویر به تصویر از پیکسلها به کلاسها را یاد میگیرند، که با نگاشت تصویر به برچسب، مانند طبقهبندی سطح تصویر، متفاوت است. از آنجایی که به تجزیه و تحلیل دانه بندی دقیق تصویر نیاز دارد، تقسیم بندی معنایی نیز یک کار وقت گیر و چالش برانگیز در تجزیه و تحلیل تصویر است. برای دستیابی به این هدف، اکثر مدلهای مبتنی بر شبکه عصبی از معماری رمزگذار/رمزگشا مانند U-Net [ 100 ]، FCN [ 101 ]، SegNet [ 102 ]، DeepLab [ 103 ، 104 ، 105 ]، AdaptSeg Net استفاده میکنند. [106 ]، Fast-SCNN [ 107 ]، HANet [ 108 ]، Panoptic-deeplab [ 109 ]، SegFormer [ 110 ]، یا Lawin+ [ 111 ]. رمزگذار استخراج ویژگی را از طریق CNN انجام می دهد و یک نمایش انتزاعی (که نقشه ویژگی نیز نامیده می شود) از تصویر اصلی استخراج می کند. رمزگشا این نقشه های ویژگی را به عنوان ورودی می گیرد و برای ایجاد یک ماسک تقسیم بندی معنایی، deconvolution را انجام می دهد.
تقسیم بندی معنایی اغلب در تحقیقات مکانی برای شناسایی مناطق مهم در یک تصویر استفاده می شود. به عنوان مثال، Zarco-Tejada و همکاران. [ 112 ] یک مدل تقسیمبندی تصویر را برای جداسازی محصولات از پسزمینه برای انجام کشاورزی دقیق ایجاد کرد. تحلیل کاربری و پوشش زمین انواع پوشش زمین و توزیع آنها را در یک صحنه تصویر شناسایی می کند. اتوماسیون چنین تحلیلی برای درک تکامل شهرنشینی، جنگل زدایی و سایر تغییرات شهری و محیطی بسیار مفید است. مطالعات زیادی برای رسیدگی به چالش های تقسیم بندی با تصاویر سنجش از دور انجام شده است. به عنوان مثال، Kampffmeyer و همکاران. [ 113] استراتژیهای پیشنهادی مانند آموزش مبتنی بر وصله و افزایش دادهها را برای حل مسئله اشیاء کوچک که در وظایف تقسیمبندی نادیده گرفته میشوند تا به دقت پیشبینی کلی بهتری دست یابند. فیتوکا و همکاران [ 114 ] یک مدل تقسیمبندی را برای استفاده از تصاویر سنجش از دور برای نقشهبرداری اکوسیستمهای تالاب جهانی برای مدیریت منابع آب و تعامل آنها با سایر اجزای سیستم زمین ایجاد کرد. مهاجرانی و سعید [ 115 ] از تقسیمبندی تصویر برای شناسایی و حذف ابرها و سایههای ابر از روی تصاویر برای کاهش خطا در تحلیلهای بیوفیزیکی و جوی استفاده کردند.
استخراج جاده و تخمین عرض جاده یکی دیگر از چالش های جالبی است که با استفاده از تقسیم بندی قابل حل است. ایده این است که تصاویر سنجش از راه دور را با تصاویر تک چشمی گرفته شده در سطح خیابان و سایر دادههای جغرافیایی ترکیب کنیم تا یک مجموعه داده زیرساختی اساسی برای تحقیقات حملونقل ایجاد کنیم [ 116 ]. همچنین تکنیکهایی برای تقویت تقسیمبندی تصویر برای دستیابی به پردازش بلادرنگ [ 117 ، 118 ]، استفاده موفقیتآمیز از دادههای چند طیفی [ 119 ، 120 ، 121 ]، و تشخیص نمونههای شی کوچک [ 122 ، 123 ، 124 ] توسعه یافته است. ، 125 ].
-
تخمین ارتفاع/عمق جسم سه بعدی از تصاویر دوبعدی
درک هندسه سه بعدی اجسام در تصاویر سنجش از دور یک تکنیک مهم برای پشتیبانی از تحقیقات مختلف است، مانند مدل سازی سه بعدی [ 126 ]، شهرهای هوشمند [ 127 ] و مهندسی اقیانوس [ 128 ].]. به طور کلی، دو نوع اطلاعات را می توان از تصاویر سنجش از دور در مورد یک شی سه بعدی استخراج کرد: ارتفاع و عمق. داده های LiDAR و داده های مدل سطح دیجیتال مشتق شده از آن (DSM) می تواند از تولید نقشه ارتفاع یا عمق برای ارائه چنین اطلاعاتی پشتیبانی کند. با این حال، استخراج داده های LiDAR اغلب گران است، بنابراین دستیابی به پوشش جهانی دشوار است. در مقایسه، توسعه ماهواره ها اجازه داده است که تصاویر سنجش از دور به یک جایگزین قابل دستیابی و کم هزینه در سطح جهانی تبدیل شوند. به طور کلی دو روش در زمینه بینایی کامپیوتری برای استخراج ارتفاع/عمق از تصاویر دو بعدی وجود دارد: تخمین تک چشمی و تطبیق استریو. هدف از تخمین تک چشمی ترسیم بافت تصویر به یک مقدار ارتفاع/عمق دنیای واقعی از یک تصویر واحد است. از آنجایی که عمق/ارتفاع یک مکان خاص نه تنها به ویژگی های محلی بلکه به محیط اطراف آن مربوط می شود، یک مدل گرافیکی احتمالی اغلب برای مدل سازی چنین روابطی استفاده می شود. به عنوان مثال، ساکسنا و همکاران. [129 ] از یک مدل میدان تصادفی مارکوف (MRF) برای ترسیم ویژگی های ظاهری مربوط به یک نقطه معین به یک مقدار ارتفاع استفاده کرد. ویژگی ها همچنین می توانند اشکال مختلفی داشته باشند، مانند ویژگی های دست ساز [ 129 ]، برچسب های معنایی [ 130 ، 131 ، 132 ، 133 ، 134 ]، و ویژگی های استخراج شده توسط CNN [ 135 ، 136 ، 137 ، 138 ]. ایگن و همکاران [ 139 ] از دو CNN برای استخراج اطلاعات از دیدگاه های جهانی و محلی استفاده کرد و بعداً آنها را با تخمین ساختار عمق جهانی و اصلاح آن با ویژگی های محلی ترکیب کرد. این کار بعداً توسط Eigen و Fergus بهبود یافت [ 140] برای پیش بینی اطلاعات عمق با استفاده از ویژگی های تصویر چند مقیاسی استخراج شده از CNN. D-Net [ 141 ] یک شبکه تعمیم یافته جدید است که ویژگی های محلی و جهانی را با وضوح های مختلف جمع آوری می کند و به بدست آوردن نقشه های عمقی از تصاویر RGB تک چشمی کمک می کند.
در تطبیق استریو، یک مدل ارتفاع/عمق را با استفاده از مثلثسازی از دو تصویر متوالی محاسبه میکند و وظیفه کلیدی یافتن نقاط متناظر دو تصویر است. Scharstein و Szeliski [ 142 ] مجموعه ای از الگوریتم های مکاتبات استریو دو فریمی را بررسی کردند. آنها همچنین یک بستر آزمایشی برای ارزیابی الگوریتمهای استریو ارائه کردند. تکنیکهای یادگیری ماشین نیز در کیس استریو به کار گرفته شدهاند و این اغلب با رفع نیاز به تراز دقیق دوربین به نتایج بهتری منجر میشود [ 143 , 144 , 145]. برای تخمین ارتفاع/عمق، تصاویری که از راه دور و از میدان دید کامپیوتری اندازه گیری می شوند، ویژگی های متفاوتی دارند و چالش های مختلفی را ارائه می دهند. به عنوان مثال، تصاویر سنجش از راه دور اغلب املایی هستند و حاوی اطلاعات متنی محدودی هستند. همچنین، آنها معمولا وضوح فضایی محدود و پوشش منطقه بزرگی دارند، اما اهداف پیشبینی ارتفاع/عمق کوچک هستند. برای پرداختن به این مسائل، Srivastava و همکاران. [ 146 ] یک تابع از دست دادن مشترک در CNN ایجاد کرد که از دست دادن برچسبگذاری معنایی و از دست دادن رگرسیون را برای استفاده بهتر از اطلاعات پیکسلی برای پیشبینی دقیق ترکیب میکند. مو و زو [ 135] یک شبکه عصبی دکانولوشنال را پیشنهاد کرد و از دادههای DSM برای نظارت بر فرآیند آموزش برای کاهش تلاش دستی عظیم برای تولید ماسکهای معنایی استفاده کرد. اخیراً، رویکردهای جدیدتر، مانند تطبیق بلوک های نیمه جهانی، برای مقابله با وظایف چالش برانگیزتر، مانند تطبیق مناطق حاوی توده های آبی، که تشخیص دقیق نابرابری برای آنها به دلیل عدم وجود بافت در تصاویر دشوار است، توسعه یافته است [ 147 ]. ].
-
وضوح تصویر فوق العاده
کیفیت تصاویر یک نگرانی مهم در بسیاری از کاربردها است، مانند تصویربرداری پزشکی [ 148 ، 149 ]، سنجش از دور [ 150 ]، و سایر وظایف بینایی از تصاویر نوری [ 151 ، 152 ]]. با این حال، تصاویر با وضوح بالا همیشه در دسترس نیستند، به ویژه آنهایی که برای استفاده عمومی هستند و یک منطقه جغرافیایی بزرگ را پوشش می دهند، تا حدی به دلیل هزینه بالای جمع آوری داده ها. بنابراین، وضوح فوق العاده، که به بازسازی تصاویر با وضوح بالا (HR) از یک یا مجموعه ای از تصاویر با وضوح پایین (LR) اشاره دارد، یک تکنیک کلیدی برای رسیدگی به این موضوع بوده است. روش های سنتی با وضوح فوق العاده را می توان به انواع مختلفی طبقه بندی کرد، به عنوان مثال، بصری ترین روش مبتنی بر درون یابی است. اور و گراس [ 153 ] از قضیه نمونه برداری چند کانالی تعمیم یافته [ 154 ] برای ارائه راه حلی برای به دست آوردن تصاویر HR از مجموعه تصاویر LR با جابجایی فضایی K استفاده کردند. سایر روشهای درونیابی عبارتند از تکرار پیشفرض (IBP) [ 155، 156 ] و طرح ریزی بر روی مجموعه های محدب (POCS) [ 157 ، 158 ]. نوع دیگر به مدلهای آماری برای یادگیری آماری تابع نگاشت از تصاویر LR به تصاویر HR بر اساس جفتهای پچ LR-HR وابسته است [ 159 ، 160 ]. برخی دیگر بر اساس مدل های احتمال ساخته شده اند، مانند نظریه بیزی یا میدان تصادفی مارکوف [ 161 ، 162 ، 163 ، 164 ]. برخی از روش های وضوح فوق العاده به روشی متفاوت از حوزه تصویر عمل می کنند. به عنوان مثال، تصاویر به یک حوزه فرکانس تبدیل می شوند، بازسازی می شوند و به تصاویر تبدیل می شوند [ 165 ، 166 ، 167]. تبدیل توسط تکنیک های خاصی مانند تبدیل فوریه (FT) یا تبدیل موجک (WT) انجام می شود.
اخیراً، توسعه یادگیری عمیق کمک زیادی به تحقیقات با وضوح تصویر فوق العاده کرده است. کار مرتبط از روشهای مبتنی بر CNN [ 168 ، 169 ] یا روشهای مبتنی بر شبکه متخاصم مولد (GAN) [ 170 ] استفاده کرده است. دونگ و همکاران [ 168 ] از CNN برای نقشه برداری بین جفت تصویر LR/HR استفاده کرد. ابتدا، تصاویر LR با استفاده از درون یابی دو مکعبی تا وضوح هدف نمونه برداری می شوند. سپس، نگاشت غیرخطی بین جفت های تصویر LR/HR توسط سه لایه کانولوشن شبیه سازی می شود که به ترتیب بیانگر استخراج ویژگی، نگاشت غیرخطی و بازسازی است. بسیاری از راه حل های مشابه مبتنی بر CNN نیز پیشنهاد شده اند [ 169 ، 171 ، 172 ، 173، 174 ، 175 ] و در ساختارهای شبکه، توابع از دست دادن و سایر پیکربندی های مدل متفاوت هستند. لدیگ و همکاران [ 170] یک روش وضوح تصویر فوق العاده مبتنی بر GAN را برای رسیدگی به مسئله تولید تصاویر کمتر واقعی توسط توابع از دست دادن معمول پیشنهاد کرد. در یک CNN معمولی، میانگین مربعات خطا (MSE) اغلب به عنوان تابع ضرر برای اندازه گیری تفاوت بین خروجی و حقیقت زمین استفاده می شود. به حداقل رساندن این تلفات همچنین معیار ارزیابی برای یک کار با وضوح فوق العاده – نسبت سیگنال به نویز اوج (PSNR) را به حداکثر می رساند. با این حال، تصاویر بازسازی شده ممکن است بیش از حد صاف باشند، زیرا از دست دادن میانگین تفاوت های پیکسلی است. برای پرداختن به این موضوع، نویسندگان یک از دست دادن ادراکی را پیشنهاد کردند که GAN را تشویق میکند تا یک تصویر واقعی واقعی ایجاد کند که به سختی توسط متمایزکننده قابل تشخیص است. علاوه بر تصاویر پانکروماتیک (PANs)، برخورد با تصاویر فراطیفی (HSIs) به دلیل مشکلات جمعآوری HR HSI چالشبرانگیزتر است. از این رو،176 , 177 , 178 , 179 , 180 ] نیز گزارش شده است. در سالهای اخیر، رویکردهایی مانند EfficientNet [ 181 ] برای بهبود تصاویر مدل ارتفاعی دیجیتال (DEM) از LR به HR با افزایش وضوح تا 16 برابر بدون نیاز به اطلاعات اضافی پیشنهاد شدهاند. کوین و همکاران [ 182 ] یک شبکه گرادیان عمیق بدون نظارت (UDGN) را برای مدلسازی اطلاعات تکرارشونده درون یک تصویر پیشنهاد کرد و از آن برای تولید تصاویر با وضوح بالاتر استفاده کرد.
-
ردیابی اشیا
ردیابی اشیا یک کار چالش برانگیز و پیچیده است. این شامل تخمین موقعیت و وسعت یک شی در حین حرکت در یک صحنه است. برنامههای کاربردی در بسیاری از زمینهها از ردیابی شی استفاده میکنند، مانند ردیابی وسیله نقلیه [ 183 ، 184 ]، نظارت خودکار [ 185 ، 186 ]، نمایهسازی ویدیویی [ 187 ، 188 ]، و تعامل انسان و رایانه [ 189 ، 190 ]. چالش های زیادی برای ردیابی اشیاء وجود دارد [ 191]، برای مثال، حرکت ناگهانی جسم، حرکت دوربین و تغییر ظاهر. بنابراین، محدودیتهایی مانند سرعت ثابت معمولاً برای سادهسازی کار هنگام توسعه الگوریتمهای جدید اضافه میشوند. به طور کلی، سه مرحله ردیابی شی را تشکیل می دهند: تشخیص شی، انتخاب ویژگی شی، و ردیابی حرکت [ 192 ]. تشخیص اشیا، اهداف را در هر فریم ویدیویی یا زمانی که در ویدیو ظاهر میشوند، شناسایی میکند [ 56 ، 193 ]. پس از شناسایی هدف، یک ویژگی منحصر به فرد هدف برای ردیابی انتخاب می شود [ 194 ، 195 ]. در نهایت، یک الگوریتم ردیابی مسیر هدف را هنگام حرکت تخمین میزند [ 196 ، 197 ، 198]. روشهای موجود در روشهای انتخاب ویژگی شی و مدلسازی حرکت متفاوت هستند [ 191 ].
در زمینه سنجش از راه دور، ردیابی اشیا به دلیل اشیاء با وضوح پایین در ناحیه هدف، چرخش اشیا و انسداد پسزمینه شی حتی چالشبرانگیزتر است. کارهای مربوط به این چالش ها شامل [ 183 ، 184 ، 192 ، 199 ، 200 ، 201 ] است. برای حل مسئله وضوح هدف پایین، Du et al. [ 199 ] یک ردیاب مبتنی بر جریان نوری را پیشنهاد کرد. یک جریان نوری تغییرات در روشنایی تصویر را در حوزه مکانی-زمانی نشان می دهد. بنابراین، اطلاعاتی در مورد حرکت یک جسم ارائه می دهد. برای دستیابی به این هدف، ابتدا یک میدان جریان نوری بین دو فریم با روش لوکاس-کاناد [ 202 ] محاسبه شد.]. سپس نتیجه با سیستم رنگی HSV (Hue, Saturation, Value) ادغام شد تا میدان جریان نوری را به یک تصویر رنگی تبدیل کند. در نهایت، از تصویر مشتق شده برای به دست آوردن موقعیت هدف پیش بینی شده استفاده شد. این روش به فریم های متعدد گسترش یافته است تا موقعیت هدف را با دقت بیشتری تعیین کند. بی و همکاران [ 183 ] از یک تکنیک یادگیری عمیق برای پرداختن به همان موضوع استفاده کرد. ابتدا، در طول آموزش، یک مدل CNN با نمونههای منفی تقویتشده آموزش داده شد تا شبکه را متمایزتر کند. نمونه های منفی توسط شبکه های متخاصم مولد حداقل مربعات (LSGANs) [ 203 ] تولید شدند.]. سپس، یک ماژول برجسته در مدل CNN ادغام شد تا قدرت نمایش آن را بهبود بخشد، که برای هدفی با تغییرات سریع و پویا مفید است. در نهایت، یک مدل تخصیص وزن محلی برای فیلتر کردن نمونههای منفی با وزن بالا برای افزایش کارایی مدل اتخاذ شد. روشهای دیگری مانند فیلتر همبستگی چرخشی (RACF) [ 204 ] نیز برای تخمین چرخش جسم در یک تصویر سنجش از راه دور و متعاقباً تشخیص تغییر در اندازههای جعبه مرزی ناشی از چرخش ایجاد شدهاند.
-
تشخیص تغییر
تشخیص تغییر فرآیند شناسایی مناطقی است که تغییراتی را با تجزیه و تحلیل مشترک دو یا چند تصویر ثبت شده تجربه کردهاند [ 205 ]، خواه این تغییر ناشی از بلایای طبیعی باشد یا گسترش شهری. تشخیص تغییر کاربردهای بسیار مهمی در تحلیل کاربری و پوشش زمین، ارزیابی جنگل زدایی و برآورد خسارت دارد. به طور معمول، قبل از تشخیص تغییرات، چند مرحله مهم پیش پردازش تصویر، مانند ثبت هندسی [ 206 ، 207 ]، تصحیح رادیومتریک [ 208 ]، و حذف نویز [ 209 ، 210 ] وجود دارد که باید برای کاهش مصنوعات ناخواسته انجام شود. برای تشخیص تغییر، مطالعات قبلی [ 211 ،212 ] از پردازش تصویر، تجزیه و تحلیل آماری، یا تکنیک های استخراج ویژگی برای تشخیص تفاوت بین تصاویر استفاده کرد. برای مثال، تفاوت تصویر [ 213 ، 214 ، 215 ] پرکاربردترین روش است. با تفریق دو تصویر ثبت شده، یک توزیع تفاوت ایجاد می کند و یک آستانه مناسب بین پیکسل های تغییر و بدون تغییر پیدا می کند. رویکردهای دیگر، مانند سهمیه بندی تصویر [ 216 ]، رگرسیون تصویر [ 217 ]، PCA (تحلیل مؤلفه اصلی) [ 218 ، 219 ]، و تحلیل برداری تغییر [ 220 ، 221 ] نیز به خوبی توسعه یافته اند.
کار اخیر شروع به استفاده از تکنیک های هوش مصنوعی [ 222 ، 223 ، 224 ] و یادگیری عمیق [ 225 ، 226 ، 227 ، 228 ، 229 ، 230 ، 231 ] برای انجام تشخیص تغییر کرده است. برای مثال، سان و همکاران. [ 224] روشی را برای بهینهسازی مکانی یک متغیر k در الگوریتم k-نزدیکترین همسایه (kNN) برای پیشبینی درصد پوشش گیاهی (PVC) پیشنهاد کرد. به جای یافتن یک مقدار k بهینه جهانی، یک k بهینه محلی از مکانی به مکان دیگر شناسایی شد. نرخ تغییر واریانس PVC تخمین زده شده در یک پیکسل معین با تغییر k در الگوریتم kNN بر اساس مکان پیکسل محاسبه شد. در مرحله بعد، یک k بهینه محلی انتخاب شد به طوری که منحنی نرخ تغییر واریانس در این مقدار پایدار می شود. وانگ و همکاران [ 231 ] از یک شبکه تشخیص شیء، Faster R-CNN [ 56 ] استفاده کرد]، برای تشخیص تغییر. نویسندگان دو شبکه مختلف را پیشنهاد کردند، یکی با هدف تشخیص از یک تصویر واحد ادغام شده از دو تصویر ثبت شده و دیگری تشخیص تفاوت دو تصویر را انجام می دهد. از آنجایی که نتایج تشخیص سریعتر R-CNN نواحی جعبه محدود هستند، یک مدل مار [ 232 ] بیشتر برای بخشبندی منطقه تغییر دقیق اعمال میشود. شاخص تشابه ساختاری (SSIM) [ 233] معیاری است که برای پیش بینی کیفیت درک شده پخش تلویزیونی و تصاویر سینمایی از طریق مقایسه تصاویر پخش شده و دریافتی با یکدیگر از نظر شباهت استفاده می شود. هر چه شباهت بیشتر باشد کیفیت پخش بهتر است. تصاویر (در دو مُهر زمانی مختلف) را می توان از طریق این شاخص قرار داد تا مشخص شود که چقدر شبیه (یا ناهمسان) هستند و از این رو می توان میزان تغییر را تعیین کرد.
-
پیش بینی
پیشبینی فرآیندی است که از مدلهای آماری بر روی مشاهدات گذشته و حال برای پیشبینی آینده استفاده میکند. مدلهای پیشبینی کلاسیک شامل میانگینهای متحرک، هموارسازی نمایی، رگرسیون خطی، مدلهای احتمال، شبکههای عصبی و تغییرات آنها هستند. مشاهدات می تواند از منابع مختلف و در یک حوزه مکانی یا زمانی یا هر دو باشد. نمونههایی در زمینههای متعددی مانند پیشبینی آبوهوا، خشکسالی، استفاده از زمین و فروش یافت میشوند، که در آن پیشبینی میتواند نجاتبخش باشد یا منافع اجتماعی-اقتصادی داشته باشد. در حالی که پیشبینی مزایایی به همراه دارد، بر دادههای تاریخی تکیه میکند که ممکن است به دلیل محدودیتهای منابع یا محیطی فاقد آن باشند. خوشبختانه، سنجش از دور فرصتی برای مشاهدات طولانی مدت و در مقیاس بزرگ فراهم می کند که می تواند در مدل های عددی برای پیش بینی و پیش بینی ادغام شود. با این حال، به طور کلی، تصاویر سنجش از راه دور معمولا به طور مستقیم در یک مدل پیش بینی استفاده نمی شود. در عوض، پارامترها یا شاخص های مشتق شده [234 ، 235 ، 236 ] محاسبه شده از این تصاویر اغلب استفاده می شود. شاخص یک نتیجه جبری و آماری از داده های چند طیفی است و می تواند در سناریوهای مختلف اعمال شود. برای مثال، شاخص تفاوت نرمال شده گیاهی (NDVI)، دمای سطح زمین (LST) و شاخص وضعیت دمای گیاهی (VTCI) [ 236 ، 237 ] شاخص هایی از شرایط پوشش گیاهی یا رطوبت هستند و می توانند برای پایش خشکسالی استفاده شوند [ 238 ، 239 ]. , 240 , 241 , 242 ].
اخیراً، محققان شروع به بررسی کاربرد تکنیک های یادگیری عمیق برای پیش بینی داده های توالی زمانی کرده اند [ 243 ، 244 ، 245 ، 246 ، 247 ، 248 ، 249 ، 250 ]. از آنجایی که چنین پیشبینیهایی شامل پیشبینی زمانی است، مدلی که میتواند دادههای توالی را مدیریت کند، اغلب اتخاذ میشود، مانند مدلهای شبکه باور عمیق (DBN) [ 251 ] یا مدلهای حافظه کوتاهمدت بلند مدت (LSTM) [ 252 ]. به عنوان مثال، چن و همکاران. [ 245 ] DBNها را برای پیشبینی کوتاهمدت خشکسالی با استفاده از دادههای بارش اعمال کرد. پورنیما و پوشپالاتا [ 248] از همان داده ها با LSTM برای پیش بینی های بلندمدت بارندگی استفاده کرد. کاربرد دیگری که مستقیماً از تصاویر سنجش از دور برای پیشبینی استفاده میکند، پیشبینی نوسانات سطح دریاچه است [ 253 ]. کاربردهایی مانند اینها پدیده های هیدرولوژیکی محوری را دنبال می کنند، به عنوان مثال، خشکسالی، که پیامدهای اجتماعی و اقتصادی شدیدی دارند. پیش بینی محتوای آب تاج در برنج [ 254 ] با استفاده از یک شبکه عصبی مصنوعی که تصاویر حرارتی و مرئی را ادغام می کند نیز یکی از برنامه های پیش بینی جالب است. اخیراً، مدلهای ترانسفورماتور بهطور فزایندهای بهعنوان ابزاری برای پیشبینی سریهای زمانی با استفاده از سنجش از دور یا سایر دادههای مکانی استفاده میشوند [ 250 ].
5.2. برنامه ها از تصاویر نمای خیابان استفاده می کنند
به عنوان شکل جدیدی از داده ها، تصاویر نمای خیابان نمایشی مجازی از محیط اطراف ما ارائه می دهند. با توجه به افزایش در دسترس بودن این دادههای تصویری ریز، تصاویر نمای خیابان برای تعیین کمیت ویژگیهای محله، محاسبه عوامل نمای آسمان، تشخیص تغییرات محله، شناسایی درک انسان از مکانها، کشف منحصربهفرد بودن مکانها و پیشبینی فعالیتهای انسانی اتخاذ شدهاند. جدول 2 این کاربردها، روش های مورد استفاده برای تجزیه و تحلیل تصاویر نمای خیابان و محدودیت های رویکردهای سنتی را خلاصه می کند.
-
کمی سازی املاک محله
از آنجایی که دادههای سطح خیابان نماهای تصویری را از دیدگاههای انسانی ارائه میکنند، میتوان از آنها برای استنباط ویژگیهای اجتماعی و محیطی مختلف یک منطقه شهری استفاده کرد [ 255 ، 256 ، 257 ، 258 ، 259 ، 260 ، 261 ]. گبرو و همکاران [ 255 ] آمار جمعیت شناختی را بر اساس توزیع همه وسایل نقلیه موتوری که در محله های خاص در ایالات متحده با آنها مواجه می شوند، تخمین زدند. آنها تا 50 میلیون تصویر نمای خیابان را از 200 شهر نمونه برداری کردند و یک مدل قطعه تغییر شکل پذیر (DPM) [ 262 ] را برای شناسایی خودروها اعمال کردند. یک شبکه عصبی کانولوشنال (CNN) [ 43 ، 263] همچنین برای طبقه بندی 22 میلیون وسیله نقلیه از تصاویر نمای خیابان بر اساس ساخت، مدل، سال و در مجموع 88 ویژگی مربوط به خودرو استفاده شد که بیشتر برای آموزش مدل ها برای پیش بینی وضعیت اجتماعی-اقتصادی مورد استفاده قرار گرفت. مثال دیگر پیشبینی خطر تصادف رانندگی با استفاده از ویژگیهای قابل مشاهده از ساختمانهای مسکونی است. Kita و Kidziński [ 257 ] 20000 رکورد را از یک مجموعه داده بیمه بررسی کردند و نمای خیابان گوگل (GSV) را برای آدرس های فهرست شده در این سوابق جمع آوری کردند. آنها ساختمان های مسکونی را بر اساس سن، نوع و شرایط آنها حاشیه نویسی کردند و این متغیرها را در یک مدل خطی تعمیم یافته (GLM) اعمال کردند [ 264 ، 265] برای بررسی اینکه آیا آنها به پیش بینی بهتر خطر تصادف برای ساکنان کمک می کنند یا خیر. نتایج نشاندهنده بهبود قابل توجه مدلهای مورد استفاده شرکتهای بیمه برای مدلسازی ریسک حادثه بود. از تصاویر نمای خیابان نیز می توان برای مطالعه ارتباط بین فضای سبز در یک محله و اثرات اجتماعی و اقتصادی آن استفاده کرد [ 266 ].
-
محاسبه فاکتورهای نمای آسمان
ضریب نمای آسمان (SVF) [ 267 ] نشان دهنده نسبت بین آسمان مرئی و نیمکره پوشاننده یک مکان تحلیل شده است. این به طور گسترده ای در زمینه های مختلف، مانند مدیریت شهری، ژئومورفولوژی و مدل سازی آب و هوا استفاده می شود [ 268 ، 269 ، 270 ، 271 ]. به طور کلی، سه نوع روش محاسبه SVF وجود دارد [ 272 ]. اولی یک اندازه گیری مستقیم از عکس های چشم ماهی است [ 273 ، 274 ]. دقیق است اما نیاز به کار در محل دارد. روش دوم مبتنی بر شبیه سازی است، که در آن یک مدل سطح سه بعدی ساخته می شود و SVF ها بر اساس این مدل محاسبه می شوند [ 275 ، 276]. این روش بر شبیه سازی دقیق متکی است، اما بدست آوردن پارامترهای دقیق در صحنه های پیچیده دشوار است. آخرین روش بر اساس تصاویر نمای خیابان است. محققان از منابع تصویر عمومی نمای خیابان، مانند GSV، و تصاویر پروژه برای ترکیب عکس های چشم ماهی در مکان های مشخص استفاده می کنند [ 277 ، 278 ، 279 ، 280 ]. با توجه به توسعه سریع خدمات نمای خیابان، این روش با هزینه نسبتا کم استفاده می شود، زیرا تصاویر بیشتر مکان ها به راحتی در دسترس هستند. از این رو، کاربرد روزافزونی داشته و به یک منبع داده اصلی برای استخراج ویژگی های نمای آسمان تبدیل شده است.
میدل و همکاران [ 270 ] روشی برای محاسبه SVFها از تصاویر GSV ایجاد کرد. نویسندگان تصاویر را از یک منطقه معین بازیابی کردند و آنها را با طرح ریزی متساوی الاضلاع در نمای نیمکره ای (عکس های چشم ماهی) سنتز کردند. ترکیبی از یک فیلتر Sobel اصلاح شده [ 281 ] و الگوریتم تشخیص مبتنی بر لبه پر از سیل [ 282 ] بر روی تصاویر پردازش شده برای تشخیص ناحیه آسمان قابل مشاهده اعمال شد. سپس SVFها در هر مکان با استفاده از ابزارهای پیاده سازی شده توسط [ 280 ] محاسبه شدند. SVF های مشتق شده را می توان بیشتر در کاربردهای مختلف استفاده کرد، مانند ارزیابی منطقه آب و هوای محلی و تخمین مدت زمان خورشید [ 270 ]]. علاوه بر SVF، ویژگیهای نمای صحنههای مختلف طبیعی مانند درختان و ساختمانها نیز در مطالعات شهری-محیطی حائز اهمیت است. گونگ و همکاران [ 272 ] از یک الگوریتم یادگیری عمیق برای استخراج همزمان سه ویژگی خیابان (آسمان، درختان و ساختمانها) در یک محیط شهری با تراکم بالا برای محاسبه عوامل دید آنها استفاده کرد. نویسندگان 33544 تصویر پانوراما را در هنگ کنگ از GSV و تصاویر بخش را با شبکه تجزیه صحنه هرمی (PSPNet) [ 283 ] نمونه برداری کردند. این شبکه هر پیکسل در تصویر را به دسته هایی مانند آسمان، درختان و ساختمان ها اختصاص می دهد. سپس، تصاویر پانورامای بخشبندی شده به تصاویر چشم ماهی [ 278 ] نمایش داده میشوند. از آنجایی که هر تصویر بخشهایی از دستههای مربوطه را ارائه میکند، یک روش عکاسی کلاسیک ساده [284 ] برای محاسبه عوامل دید مختلف استفاده شد. اخیرا شاتا و همکاران. [ 285 ] همبستگی بین فاکتور نمای آسمان و مشخصات حرارتی میدان پردیس دانشگاهی خشک را برای مطالعه تأثیرات بر ساکنان دانشگاه تعیین کرد. تخمین فاکتور نمای آسمان همچنین یک تکنیک کلیدی برای درک اثرات جزیره گرمایی شهری و چگونگی کمک عوامل مختلف منظر به افزایش دمای سطح زمین در شهرها (به ویژه بیابان) برای توسعه استراتژی های کاهش برای گرمای شدید است [ 286 ].
-
نظارت بر تغییر محله
در GSV، گوگل پایگاه داده تصاویر نمای خیابان خود را به طور منظم به روز می کند. بنابراین، علاوه بر امکان دسترسی به یک تصویر GSV واحد از یک ملک، مطالعاتی وجود دارد که از چندین تصویر GSV برای تشخیص تغییرات قابل مشاهده در نمای بیرونی خواص (یعنی مسکن) در طول زمان استفاده می کند. برای نظارت بر تغییرات محله، برخی از محققان داده ها را از مصاحبه های حضوری، پرسشنامه های پستی، یا نظرسنجی های ادراک بصری جمع آوری کرده اند [ 287 ، 288 ، 289 ، 290 ، 291 ]. نظرسنجیها را میتوان سفارشی کرد، بنابراین جزئیات عمیق و ریز هستند. با این حال، این روش ممکن است منجر به سوگیری انسان یا پوشش تنها یک منطقه جغرافیایی کوچک شود. محققان دیگر از پایگاه داده GSV استفاده کرده اند اما تصاویر را به صورت دستی بررسی کرده اند [292 , 293 , 294 , 295 ]. این تلاشها را در محل کاهش میدهد، اما افزایش مقیاس در این مطالعات دشوار است. اخیراً، به لطف پیشرفتهای یادگیری ماشین و بینایی رایانه، محققان میتوانند به طور خودکار محیط را در یک مرکز شهری بزرگ با مقادیر عظیمی از دادههای اجتماعی و زیستمحیطی ممیزی کنند. به عنوان مثال، نایک و همکاران. [ 296 ] از یک روش بینایی رایانه ای برای تعیین کمیت بهبودهای فیزیکی محله ها با تصاویر سری زمانی و سطح خیابان استفاده کرد. آنها تصاویری را از پنج شهر ایالات متحده نمونه برداری کردند و درک ایمنی را با استریت اسکور که در نایک و همکاران معرفی شده است، محاسبه کردند. [ 297 ]. Streetscore شامل (1) بخشبندی تصاویر به چندین دسته، مانند ساختمانها و درختان است [ 298]، (2) استخراج ویژگی ها از هر منطقه تقسیم شده [ 299 ، 300 ]، و (3) پیش بینی امتیاز یک خیابان بر حسب لذت محیطی آن [ 301 ]. تفاوت در امتیازات در یک مکان معین اما با مهرهای زمانی متفاوت می تواند برای اندازه گیری بهبود فیزیکی محیط استفاده شود. نمرات با رتبهبندیهای ایجاد شده توسط انسان همبستگی قوی دارند. مثال دیگر تشخیص اصیل سازی در یک منطقه شهری است [ 302]. نویسندگان یک سی ان ان سیامی (SCNN) را پیشنهاد کردند تا تشخیص دهد که آیا یک ویژگی فردی بین دو نقطه زمانی ارتقا یافته است یا خیر. ورودیها دو تصویر GSV از یک ویژگی در مُهرهای زمانی مختلف هستند و خروجی طبقهبندی نتیجهای است که نشان میدهد آیا ویژگی ارتقا یافته است یا خیر.
-
شناسایی ادراکات انسان از مکان ها
کمی کردن رابطه بین ادراکات انسانی و محیطهای متناظر در بسیاری از زمینهها، مانند هوش مکانی، و علوم شناختی و رفتاری [ 303 ] بسیار مورد توجه بوده است. مطالعات اولیه معمولاً از ارتباطات مستقیم یا غیرمستقیم برای بررسی ادراکات انسانی استفاده می کردند [ 304 ، 305 ، 306 ]. این ممکن است منجر به تعصب انسانی شود و به سختی می توان آن را برای مطالعه مناطق جغرافیایی (شهری) بزرگ به کار برد. ظهور فنآوریهای جدید، مانند یادگیری عمیق، و خدمات ابری مرتبط با زمین، مانند Flickr و GSV، روشها و منابع داده پیشرفتهای را برای تجزیه و تحلیل در مقیاس بزرگ حس انسان در مورد محیط فراهم میکند. به عنوان مثال، کانگ و همکاران. [ 307] احساسات انسانی را از بیش از 2 میلیون چهره که از بیش از 6 میلیون عکس شناسایی شده بود استخراج کرد و سپس احساسات را با عوامل محیطی مرتبط کرد. آنها ابتدا با استفاده از اطلاعات برچسب گذاری شده جغرافیایی توسط Flickers API بر روی سایت های گردشگری معروف و ویژگی های جغرافیایی مربوطه از Google Maps API و عکس های Flickr تمرکز کردند. سپس، آنها از DBSCAN [ 308 ] برای ساختن خوشههای فضایی برای نمایش مناطق داغ فعالیتهای انسانی استفاده کردند و بیشتر از تشخیص احساسات چهره ++ ( https://www.faceplusplus.com/emotion-recognition/ ) استفاده کردند.، در 1 مارس 2022 مشاهده شد) برای استخراج احساسات انسان بر اساس حالات چهره آنها. بر اساس نتایج، نویسندگان توانستند رابطه بین شرایط محیطی و تغییرات در احساسات انسان را شناسایی کنند. این کار مطالعه را به مقیاس جهانی بر اساس داده های جمع سپاری و تکنیک های یادگیری عمیق گسترش می دهد. روش شناسی های مشابه نیز در آثار مختلف ظاهر می شود [ 297 ، 309 ، 310 ]. این تحقیق به مکان هایی فراتر از سایت های توریستی با خدمات GSV گسترش یافته است. ژانگ و همکاران [ 303 ] یک شبکه عصبی پیچیده عمیق (DCNN) را برای پیشبینی ادراک انسان در مناطق شهری جدید از تصاویر GSV پیشنهاد کرد. یک مدل DCNN با مجموعه دادههای پالس مکانهای MIT [ 311] برای استخراج ویژگیهای تصویر و پیشبینی ادراکات انسانی با تابع پایه شعاعی (RBF) هسته SVM [ 312 ]. برای شناسایی رابطه بین عناصر بصری حساس یک مکان و یک ادراک داده شده، یک سری از تحلیلهای آماری، از جمله تقسیمبندی تصاویر به نمونههای شی و تحلیل رگرسیون چند متغیره، برای شناسایی همبستگی بین دستههای شی تقسیمبندی شده و ادراک انسان انجام شد. با عبور از 4 میلیارد دستگاه تلفن همراه در سال 2020 و افزایش پیش بینی شده به 18 میلیارد دستگاه در 5 سال آینده، بهترین روش برای تشخیص و نظارت بر احساسات انسان، استفاده از دستگاه های لبه، به عنوان مثال، حسگرهای اینترنت اشیا خواهد بود. همچنین، با افزایش حجم داده ها، محاسبات لبه برای تشخیص احساسات [ 313] استفاده از CNN “روی لبه” نیز به یک رویکرد بسیار کارآمد تبدیل شده است.
-
کاوش منحصر به فرد بودن شخصیت و مکان
درک ناهماهنگی بصری و ناهمگونی مکانهای مختلف از نظر فعالیتهای انسانی و عوامل اجتماعی-اقتصادی مهم است. مطالعات اولیه برای درک مکان عمدتاً بر اساس نظرسنجی ها و مصاحبه های اجتماعی بود [ 314 ، 315 ]. اخیراً، در دسترس بودن تصاویر خیابانی در مقیاس بزرگ، مانند GSV، و توسعه تکنیکهای بینایی رایانهای، توانایی درک معنایی خودکار صحنه تصویر و وضعیت فیزیکی، محیطی و اجتماعی مکان مربوطه را به همراه دارد. ژانگ و همکاران [ 316] چارچوبی را پیشنهاد کرد که مفهوم مکان را از نظر مکان رسمیت می بخشد. چارچوب شامل دو جزء، هستی شناسی صحنه خیابان و توصیفگر نمای خیابان است. در هستی شناسی نمای خیابان، یک شبکه یادگیری عمیق، PSPNet [ 283 ]، برای تقسیم معنایی تصویر نمای خیابان به 150 دسته از 64 ویژگی که مبانی صحنه های خیابان را نشان می دهد، استفاده شد. برای توصیف کمی نمای خیابان، یک ماتریس بصری خیابان و توصیفگر بصری خیابان از نتایج هستیشناسی صحنه تولید شد. سپس از این دو مقدار برای بررسی تنوع عناصر خیابان برای یک خیابان یا مقایسه دو خیابان مختلف استفاده شد. مثال دیگر تخمین اطلاعات جغرافیایی از یک تصویر در مقیاس جهانی است. ویاند و همکاران [ 317] یک مدل مبتنی بر CNN با 91 میلیون عکس برای پیشبینی مکان تصویر پیشنهاد کرد. برای افزایش امکانسنجی مدل، آنها سطح زمین را بر اساس یک توزیع عکس تقسیمبندی کردند به طوری که مناطق پرجمعیت توسط سلولهای دانهریز ریزتر و مناطق پرجمعیت توسط سلولهای گرانول درشتتر پوشانده شدند. این کار با ادغام حافظه بلند مدت کوتاه مدت (LSTM) در تجزیه و تحلیل گسترش می یابد زیرا عکس ها به طور طبیعی در توالی رخ می دهند. به این ترتیب، مدل میتواند همبستگیهای جغرافیایی بین عکسها را به اشتراک بگذارد و دقت پیشبینی مکانهایی را که یک تصویر گرفته میشود، بهبود بخشد. ژائو و همکاران [ 318] از جعبههای مرزبندی ساختمان شناساییشده از تصاویر استفاده کرد و این زمینه را در مدل CNN برای پیشبینی برچسب دقیقتر توصیفکننده عملکرد ساختمان (مثلاً مسکونی، تجاری یا تفریحی) قرار داد. یکی دیگر از جنبه های شخصیتی یک مکان، میزان فعالیت مجرمانه ای است که شاهد آن است. مقاله تحقیقاتی جالب امیرزمان و همکاران. [ 319 ] مدلی را پیشنهاد کرد که از تصاویر نمای خیابان تکمیلشده توسط روایتهای پلیس منطقه برای طبقهبندی محلهها به عنوان مناطق جرم و جنایت بالا/کم استفاده میکند.
-
پیش بینی فعالیت های انسانی
درک فعالیتهای انسانی و تحرک با جزئیات بیشتر مکانی و زمانی برای برنامهریزی شهری، ارزیابی سیاستها و تجزیه و تحلیل اثرات بهداشتی و زیستمحیطی برای ساکنان تصمیمات مختلف طراحی و سیاست بسیار مهم است [ 320 ، 321 ، 322 ]. مطالعات قبلی اغلب بر دادههای جمعآوریشده از نظرسنجیهای خانگی، مصاحبههای شخصی یا پرسشنامه تکیه میکردند. این داده ها بینش خوبی در مورد الگوهای شخصی ارائه می دهند. با این حال، جمع آوری آنها در سطوح منطقه ای تا ملی به منابع قابل توجهی نیاز دارد و به روز رسانی آنها دشوار است. در سال های اخیر، منابع داده های بزرگ در حال ظهور، مانند داده های تلفن همراه [ 323 ، 324 ، 325 ] و عکس های دارای برچسب جغرافیایی [ 326، 327 ]، فرصت های جدیدی را برای توسعه رویکردهای مقرون به صرفه برای به دست آوردن درک عمیق از الگوهای فعالیت انسانی فراهم کرده اند. به عنوان مثال، Calabrese و همکاران. [ 323 ] روشی را برای استفاده از داده های تلفن همراه برای تحقیقات حمل و نقل پیشنهاد کرد. نویسندگان روشهای آماری را بر روی دادهها برای تخمین ویژگیها، مانند سفرهای شخصی، مکانهای منزل، و دیگر توقفها در روال روزانه فرد اعمال کردند. علاوه بر داده های تلفن و عکس، تصاویر GSV منبع داده دیگری هستند که حتی سازگارتر، مقرون به صرفه تر و مقیاس پذیرتر هستند. مطالعات اخیر [ 320 ، 328 ، 329 ، 330] که از تصاویر GSV استفاده کرده اند، پتانسیل بزرگ داده ها را برای تجزیه و تحلیل مقایسه ای در مقیاس بزرگ نشان داده اند. به عنوان مثال، گوئل و همکاران. [ 328 ] 2000 تصویر GSV از 34 شهر برای پیش بینی الگوهای سفر در سطح شهر جمع آوری کرد. تصاویر ابتدا به هفت دسته عملکرد، به عنوان مثال، پیاده روی، دوچرخه سواری و اتوبوس طبقه بندی شدند. یک مدل رگرسیون چند متغیره برای پیشبینی اقدامات رسمی از توابع جاده شناساییشده از تصاویر GSV استفاده شد. همچنین میتوان با استفاده از تصاویر سنجش از راه دور برای غلبه بر عدم دسترسی به دادههای موقعیتیابی تلفن همراه به دلیل نگرانیهای امنیتی و حریم خصوصی، فعالیتهای انسانی را به طور قابل اعتمادی ترسیم کرد [ 331 ].
5.3. GeoAI برای تجزیه و تحلیل داده های علمی
در سال های اخیر، هوش مصنوعی و یادگیری عمیق نیز به طور فزاینده ای برای درک شرایط در حال تغییر سیستم های زمین به کار گرفته شده اند. رایششتاین و همکاران [ 332 ] پنج چالش عمده را برای پذیرش موفقیت آمیز رویکردهای یادگیری عمیق در زمین و سایر حوزه های علوم زمین شناسایی کرد. آنها قابل تفسیر، سازگاری فیزیکی، داده های پیچیده، برچسب های محدود و تقاضای محاسباتی هستند. برای مقابله با این چالش ها، مطالعات مختلفی با کاربردهای مختلف توسعه یافته است. در جدول 3 ، کاربردهای انواع مختلف داده های علم زمین و همچنین روش های سنتی و جدید (GeoAI و یادگیری عمیق) را در تجزیه و تحلیل آنها خلاصه می کنیم.
-
بارش در حال حاضر
بارش اکنون به هدف ارائه پیشبینی کوتاهمدت (برای دورههای حداکثر 6 ساعت) از شدت بارندگی در یک منطقه محلی اشاره دارد [ 333 ]. توجه قابل توجهی را به خود جلب کرده است زیرا به نیازهای مهم اجتماعی و اقتصادی می پردازد، به عنوان مثال، ارائه راهنمایی های ایمنی برای ترافیک (رانندگان، خلبانان) و ایجاد هشدارهای اضطراری برای رویدادهای خطرناک (سیل، حاشیه زمین). با این حال، پخش به موقع، دقیق و با وضوح بالا بارش اکنون به دلیل پیچیدگی های جو و فرآیندهای گردش پویای آن چالش برانگیز است [ 334 ]. به طور کلی، دو نوع رویکرد بارش اکنون وجود دارد: روش مبتنی بر پیشبینی آب و هوای عددی (NWP) و روش مبتنی بر نقشه پژواک راداری. روش مبتنی بر NWP [ 334 ،335 ] یک شبیه سازی پیچیده بر اساس معادلات فیزیکی جو می سازد، به عنوان مثال، چگونه هوا حرکت می کند و چگونه تبادل گرما. عملکرد شبیه سازی به شدت به منابع محاسباتی و پارامترهای از پیش تعریف شده، مانند شرایط اولیه و مرزی، تقریب ها و روش های عددی متکی است [ 335]. در مقابل، روش مبتنی بر نقشه پژواک راداری به دلیل تقاضای محاسباتی نسبتاً کم، سرعت سریع و دقت بالا در مقیاس زمانی Nowcasting، روز به روز محبوبتر میشود. برای روش مبتنی بر نقشه پژواک رادار، هر نقشه به یک تصویر تبدیل میشود و به الگوریتم/مدل پیشبینی وارد میشود. الگوریتم/مدل یاد می گیرد که تصاویر پژواک رادار آینده را از توالی تصویر ورودی برون یابی کند. دو عامل در فرآیند یادگیری دخیل هستند: همبستگی مکانی و زمانی پژواک های رادار. همبستگی فضایی نشان دهنده تغییر شکل شکل است در حالی که همبستگی زمانی نشان دهنده الگوهای حرکت است. بنابراین، پخش کنونی بارش مشابه مشکل پیشبینی حرکت از ویدئوها است که در آن ورودی و خروجی هر دو دنبالههای مکانی-زمانی هستند و مدل ساختار مکانی-زمانی دادهها را برای تولید دنباله آینده ضبط میکند.
مطالعات اولیه [ 336 ، 337 ، 338 ] از تکنیکهای جریان نوری برای تخمین جهت باد از دو یا چند نقشه پژواک راداری برای پیشبینی حرکت میدان بارش استفاده کردند. با این حال، چندین نقص در روش های مبتنی بر جریان نوری وجود دارد. تخمین باد و مراحل برون یابی پژواک رادار از هم جدا شده اند، بنابراین تخمین را نمی توان از نتیجه پژواک رادار بهینه کرد. علاوه بر این، الگوریتم به پارامترهای از پیش تعریف شده نیاز دارد و نمی تواند به طور خودکار توسط مقادیر انبوه داده های پژواک راداری بهینه شود. اخیراً مدلهای مبتنی بر یادگیری عمیق [ 339 ، 340 ، 341] برای رفع عیوب توسط آموزش نظارت شده سرتاسر توسعه داده شده اند، که در آن خطاها از طریق همه مؤلفه ها منتشر می شوند و پارامترها از داده ها یاد می گیرند. معمولاً سه معماری مبتنی بر یادگیری عمیق برای پخش بارش یا پیشبینی ویدیویی وجود دارد: مدلهای مبتنی بر CNN، RNN و CNN+RNN+. برای مدلهای مبتنی بر CNN، فریمها یا بهعنوان کانالهای مختلف در یک شبکه دو بعدی CNN [ 339 ، 340 ] یا به عنوان عمق در یک شبکه سهبعدی CNN [ 342 ] در نظر گرفته میشوند. برای مدل های مبتنی بر RNN، Ranzato و همکاران. [ 341] اولین مدل زبان را برای پیش بینی فریم ویدیوی بعدی ساخت. نویسندگان هر فریم را به تکههایی تقسیم کردند، آنها را با هسته ۱×۱ پیچیده و هر وصله را با الگوریتم خوشهبندی k-means کدگذاری کردند. سپس مدل پچ را در مرحله بعدی پیش بینی می کند.
سریواستاوا و همکاران [ 343 ] همچنین یک شبکه رمزگذار-رمزگشا LSTM برای پیشبینی فریمهای متعدد پیش رو پیشنهاد کرد. اگرچه هر دو مدل مبتنی بر CNN و مبتنی بر RNN میتوانند مشکل پیشبینی توالی مکانی-زمانی را حل کنند، اما به طور کامل دینامیک زمانی یا همبستگیهای مکانی را در نظر نمیگیرند. شی و همکاران با استفاده از RNN برای دینامیک زمانی و CNN برای همبستگی های فضایی. [ 344 ] دو شبکه را با هم ادغام کرد و ConvLSTM را پیشنهاد کرد. نویسندگان لایههای کاملاً متصل در LSTM را با عملیات کانولوشنی جایگزین کردند تا از همبستگیهای فضایی در هر فریم بهرهبرداری کنند. این کار نقطه عطفی برای پیش بینی فضایی و زمانی و مبنایی برای رویکردهای مختلف بعدی شد. به عنوان مثال، ConvLSTM با فیلترهای پویا استفاده می شود [ 345]، با یک مکانیسم حافظه جدید [ 346 ، 347 ] بهینه شده برای تغییر مکان [ 348 ]، با پیچیدگی سه بعدی [ 349 ]، و با مکانیسم توجه [ 350 ]. همه این مطالعات دادههای حوزه فضایی-زمانی را مدلسازی میکنند، با این حال، مطالعاتی نیز وجود دارد که بر روی طرح فضایی یک تصویر و دینامیک زمانی متناظر به طور جداگانه تمرکز دارند [ 351 ، 352 ].
-
تشخیص رویدادهای آب و هوایی شدید
شناسایی رویدادهای آب و هوایی شدید، مانند طوفان های استوایی و جبهه های آب و هوایی، برای آماده سازی و واکنش در برابر بلایا مهم است، زیرا ممکن است اثرات اقتصادی قابل توجهی [ 353 ] و خطری برای سلامتی انسان داشته باشد [ 354 ]. مطالعات اولیه [ 355 ، 356] اغلب وقوع رویدادها را زمانی که مقادیر متغیرهای مرتبط با یک آستانه ذهنی تعریف شده توسط متخصصان حوزه مقایسه میکنند، تعریف میکنند. با این حال، این اولین چالش را به همراه دارد، روشهای مختلف ممکن است مقادیر آستانه متفاوتی را برای متغیرهای یکسان اتخاذ کنند که منجر به ارزیابی متناقض از همان دادهها میشود. خوشبختانه، یادگیری عمیق ماشین را قادر میسازد تا به طور خودکار استخراج ویژگیهای متمایز و ضبط توزیعهای پیچیده دادهای را که یک رویداد را بدون نیاز به مهندسی ویژگیهای دستساز تعریف میکنند، ثبت کند. لی و همکاران [ 357] اولین مدل طبقه بندی رویدادهای آب و هوایی CNN را توسعه داد. نویسندگان متغیرهای فضایی مربوطه، به عنوان مثال، فشار، دما، و بارش را با هم در تکههای تصویری کنار هم قرار دادند و آنها را توسط CNN به عنوان یک مشکل طبقهبندی الگوی بصری برای تشخیص رویدادهای شدید آب و هوایی پردازش کردند. Racah و همکاران به جای طبقه بندی تصویر تک فریم زمانی. [ 358 ] یک مدل CNN برای محلی سازی چند طبقه ای از پدیده ها و رویدادهای ژئوفیزیکی توسعه داد. نویسندگان یک شبکه کانولوشن رمزگذار-رمزگشا سه بعدی را با داده های سه بعدی 16 متغیری (ارتفاع، عرض و زمان) اتخاذ کردند و آموزش دادند. نتایج نشان داد که مدل های سه بعدی بهتر از مدل های دو بعدی خود عمل می کنند. این تحقیق همچنین نشان میدهد که تکامل زمانی رویدادهای آب و هوایی یک عامل مهم برای تشخیص دقیق مدل و محلیسازی رویداد است.
ژانگ و همکاران [ 359 ] همچنین از اطلاعات زمانی استفاده کرد و یک مجموعه داده سه بعدی مشابه را برای پخش هم اکنون شروع و رشد رویدادهای آب و هوایی ساخت. یک چالش این است که چگونه می توان به طور موثر از حجم عظیمی از داده های متنوع استفاده کرد. ابزارهای مدرن می توانند 10 تا 100 ثانیه از داده های چند متغیره مانند دما و فشار را از یک منطقه جمع آوری کنند. این کار متخصصان انسانی و ماشینها را در موقعیتی چالش برانگیز برای پردازش و ارزیابی کمی مجموعه داده بزرگ قرار میدهد. برای مقابله با این چالش، محاسبات موازی رایج ترین راه برای سرعت بخشیدن به آموزش و استقرار مدل است. با این حال، عملکرد نه تنها به تعداد کل گرهها، بلکه به نحوه توزیع و ادغام دادهها در گرهها بستگی دارد. کورث و همکاران [ 360 ، 361] مجموعه ای از پیشرفت ها را در خوشه محاسباتی و خط لوله داده، مانند I/O (ورودی/خروجی)، مرحله بندی داده و شبکه پیاده سازی کرد. نویسندگان با موفقیت آموزش را از یک گره محاسباتی به 9600 گره [ 360 ] و خط لوله داده را به 27360 GPU [ 361 ] افزایش دادند. با افزایش حجم داده ها، کیفیت داده های آموزشی عامل مهم دیگری می شود که بر عملکرد مدل تأثیر می گذارد، به ویژه برای مدل های یادگیری عمیق که در آن عملکرد به شدت با مقدار و کیفیت داده های آموزشی موجود در ارتباط است. حقیقت اصلی تشخیص رویدادهای آب و هوایی اغلب از ابزارهای شبیه سازی سنتی، به عنوان مثال، TECA (یک ابزار موازی برای تجزیه و تحلیل آب و هوای شدید) [ 355 ] ناشی می شود.]. این ابزارها با پیروی از ترکیب معینی از معیارهای ارائه شده توسط متخصصان انسانی، پیش بینی هایی را ایجاد می کنند. با این حال، ممکن است خطاهایی در نتایج رخ دهد و در نتیجه مدلها از آن خطاها درس بگیرند. برای پرداختن به این موضوع، روشهای مختلفی از جمله یادگیری نیمه نظارتی [ 358 ]، پالایش برچسبگذاری [ 362 ] و تحلیل مجدد دادههای جوی [ 363 ، 364 ] توسعه یافت.
-
تشخیص زلزله و انتخاب فاز
یک سیستم تشخیص زلزله شامل چندین ایستگاه لرزه نگاری محلی و جهانی است. در هر ایستگاه، حرکت زمین به طور مداوم ثبت می شود و این شامل سیگنال های زلزله و غیرزلزله و همچنین صداها می شود. به طور کلی دو روش برای تشخیص و مکان یابی زلزله وجود دارد: بر اساس برداشت و بر اساس شکل موج. برای روش مبتنی بر انتخاب، گردش کار شامل چندین مرحله است، از جمله تشخیص/انتخاب فاز، تداعی فاز و مکان رویداد. در مرحله تشخیص/ برداشت فاز، وجود امواج لرزه ای از سیگنال های ثبت شده شناسایی می شود. زمان رسیدن امواج لرزه ای مختلف (امواج P و امواج S) در یک سیگنال زلزله اندازه گیری می شود. در مرحله تداعی، امواج در ایستگاه های مختلف با هم جمع می شوند تا مشخص شود که آیا زمان مشاهده آنها با زمان سفر از منبع زمین لرزه فرضی مطابقت دارد یا خیر. در نهایت، در مرحله مکان یابی رویداد، از نتیجه مرتبط برای تعیین ویژگی های زلزله، مانند مکان و بزرگی استفاده می شود.
مطالعات اولیه از ویژگیهای دست ساز مانند تغییرات دامنه، انرژی و سایر ویژگیهای آماری برای تشخیص و انتخاب فاز استفاده میکردند [ 365 ، 366 ، 367 ]. برای ارتباط فاز، روشها شامل پیشبینی زمان سفر [ 368 ، 369 ، 370 ]، استراتژیهای گروهبندی [ 371 ]، نظریه احتمال بیزی [ 372 ] و الگوریتمهای خوشهبندی [ 373 ] است. برای مکان یابی رویداد، توربر [ 374 ] و لومکس و همکاران. [ 375] روشهای متناظری مانند یک الگوریتم خطی و یک الگوریتم وارونگی جهانی را توسعه داد. بر خلاف روش برداشت چند مرحله ای، روش مبتنی بر شکل موج زلزله ها را در یک مرحله شناسایی، انتخاب، مرتبط و مکان یابی می کند. برخی از روشها، مانند تطبیق الگو [ 376 ، 377 ] و پسپروژه [ 378 ، 379 ]]، از انرژی شکل موج یا انسجام چندین ایستگاه بهره برداری می کند. به طور کلی، روش مبتنی بر چیدن دقت کمتری دارد زیرا ممکن است برخی از سیگنالهای ضعیف در مرحله تشخیص/انتخاب فیلتر شوند. در نتیجه، قادر به بهره برداری از ویژگی های اطلاعاتی بالقوه در ایستگاه های مختلف نیست. از سوی دیگر، روش مبتنی بر شکل موج به اطلاعات قبلی نیاز دارد و به دلیل جستجوی جامع مکانهای بالقوه، از نظر محاسباتی گران است.
اخیراً روشهای مبتنی بر یادگیری عمیق برای تشخیص زلزله مورد استفاده قرار گرفتهاند. پرول و همکاران [ 380 ] اولین CNN را برای تشخیص و مکان یابی زلزله توسعه داد. نویسندگان سیگنال های شکل موج را در تصاویر 2 بعدی CNN مانند وارد می کنند تا یک کار طبقه بندی را انجام دهند. خروجی منطقه جغرافیایی از پیش تعریف شده مربوطه را نشان می دهد که منشاء زمین لرزه است. یک استراتژی مشابه در مرحله تشخیص/انتخاب CNN برای طبقه بندی امواج ورودی [ 381 ، 382 ، 383 ، 384 ] اعمال شد. ژو و همکاران [ 385 ] بیشتر CNN را با RNN به عنوان یک آشکارساز دو مرحله ای ترکیب کرد. مرحله اول CNN برای فیلتر کردن نویز و مرحله دوم RNN برای انتخاب فاز استفاده شد. موسوی و همکاران [ 386] یک شبکه چند مرحله ای با CNN، RNN و یک مدل ترانسفورماتور برای طبقه بندی وجود زلزله، امواج P و امواج S به طور جداگانه پیشنهاد کرد. در مورد فاز ارتباط، مک بریتی [ 387 ] یک CNN را آموزش داد تا یک طبقه بندی باینری انجام دهد که آیا دو شکل موج بین دو ایستگاه از یک منبع مشترک هستند یا خیر. به طور متفاوت، راس و همکاران. [ 388 ] از یک RNN برای تطبیق دو شکل موج برای دستیابی به دقت پیشرفته در مرتبط ساختن فازهای زلزله با رویدادهایی که ممکن است تقریباً پشت سر هم به یکدیگر رخ دهند، استفاده کرد. علاوه بر تمام کارهای فوق، زو و همکاران. [ 389] یک شبکه چند وظیفه ای برای انجام تشخیص/انتخاب فاز و مکان یابی رویداد در همان شبکه پیشنهاد کرد. شبکه ابتدا ویژگی های منحصر به فردی را از شکل موج های ورودی ثبت شده در هر ایستگاه استخراج می کند. سپس این ویژگی توسط دو شبکه فرعی برای برداشت امواج و برای جمعآوری ویژگیهای ایستگاههای مختلف برای شناسایی رویدادهای زلزله پردازش میشود. چنین مدل مبتنی بر یادگیری عمیق جدید قادر به پردازش و ترکیب اطلاعات عظیم از چندین حسگر است و از روشهای سنتی انتخاب فاز بهتر عمل میکند و به عملکرد در سطح تحلیلگر دست مییابد.
-
مدل سازی گسترش آتش سوزی
آتشسوزیهای جنگلی منجر به تلفات جانی و میلیاردها دلار خسارت به زیرساختها شده است [ 390 ]. ارزیابی ملی آب و هوای ایالات متحده به روند افزایش فرکانس، مدت و تأثیر آتش سوزی بر اقتصاد و سلامت انسان اشاره می کند [ 391 ]. در عین حال، مبارزه با آتشسوزیهای جنگلی بسیار پیچیده است، زیرا شامل در نظر گرفتن بسیاری از ویژگیهای فیزیکی متفاوت از مکان است. مدلسازی آتشسوزی میتواند گسترش آتشسوزی را برای کمک به درک و پیشبینی رفتار آن شبیهسازی کند. این امر ایمنی آتش نشانان را افزایش می دهد، خطرات عمومی را کاهش می دهد و به برنامه ریزی شهری بلندمدت کمک می کند. مدلهای کنونی گسترش آتشسوزی عمدتاً مبتنی بر فیزیک هستند و پیشبینیهای رشد ریاضی را ارائه میکنند [ 392 ، 393 ، 394، 395 ]. شبیه سازی ها تاثیر متغیرهای فیزیکی مرتبط را در بر می گیرد. اینها را می توان بر اساس پیچیدگی، مفروضات و اجزای درگیر در چندین سطح طبقه بندی کرد [ 396 ]. برای مثال، برخی شبیهسازیها تنها از بادهای ثابت استفاده میکنند در حالی که برخی دیگر مشاهدات مداوم باد را امکانپذیر میسازند. علاوه بر پیچیدگی، دو دسته اصلی از روش های پیاده سازی وجود دارد: مبتنی بر سلول [ 397 ، 398 ، 399 ] و مبتنی بر برداری [ 400 ، 401 ، 402]. روش مبتنی بر سلول، تکامل آتش را با تعامل بین سلولهای پیوسته شبیهسازی میکند، در حالی که روش مبتنی بر بردار، جبهه آتش را به صراحت با تعداد معینی از نقاط تعریف میکند. برخی از محققان رویکردهای مبتنی بر هوش مصنوعی را برای پیشبینی منطقهای که قرار است سوزانده شود یا اندازه آتش را پیشبینی کردهاند [ 403 ، 404 ، 405 ]. برای مثال، کاستلی و همکاران. [ 404 ] منطقه سوخته را با استفاده از داده های مشخصه جنگل و داده های هواشناسی با برنامه ریزی ژنتیکی پیش بینی کرد.
اخیراً، یادگیری ماشین/یادگیری عمیق در مدلسازی گسترش آتشسوزی استفاده شده است، زیرا دادههای شبیهسازی آتشسوزی برای تصاویر و همه دادههای شبکهبندی شده، مانند پارامترهای سوخت و نقشههای ارتفاعی مشابه هستند [ 406 ]. برخلاف رویکردهای قبلی مبتنی بر هوش مصنوعی، یک روش مبتنی بر یادگیری عمیق نه تنها کل منطقه سوخته شده را تخمین می زند، بلکه تکامل فضایی جبهه آتش را در طول زمان نیز تخمین می زند. گاناپاتی سوبرامانیان و کراولی [ 407] یک روش مبتنی بر یادگیری تقویتی عمیق را پیشنهاد کرد که در آن عامل هوش مصنوعی آتش است و وظیفه آن شبیه سازی گسترش در سراسر منطقه است. در مورد CNN، تفاوت بین مطالعات مختلف در نحوه ادغام داده های غیر تصویری، مانند آب و هوا و سرعت باد، در مدل است. چگونه آنها این داده ها را به داده های شبکه ای شبیه تصویر تبدیل می کنند [ 408 ]; چگونه ورودی اسکالر را می گیرند و الحاق ویژگی ها را انجام می دهند [ 409 ]; یا اینکه چگونه از مدل های نمودار برای شبیه سازی گسترش آتش سوزی استفاده می کنند [ 410 ]. رادکه و همکاران [ 408] CNN را با استراتژی های جمع آوری داده ها از سیستم های اطلاعات جغرافیایی (GIS) ترکیب کرد. این مدل با توجه به محیط اولیه آتش سوزی، ویژگی های مکان (تصاویر سنجش از راه دور، DEM)، و داده های جوی (مثلاً فشار و دما) به عنوان ورودی، پیش بینی می کند که مناطق اطراف آتش سوزی در طول 24 ساعت بعدی بسوزد. داده های جوی به داده های تصویری تبدیل می شوند و توسط یک شبکه دو بعدی CNN پردازش می شوند. آلر و همکاران [ 409 ] در عوض همان داده ها را فقط به عنوان ورودی های اسکالر پردازش کرد. اسکالر ورودی توسط یک شبکه عصبی کاملاً متصل به ویژگیهای 1024 بعدی پردازش شد و بعداً با ویژگیهای 1024 بعدی دیگر از تصویر ورودی پردازش شده توسط عملیات کانولوشنال الحاق شد.
-
شناسایی و ردیابی گرداب اقیانوسی در مقیاس متوسط
گرداب های اقیانوسی جریان های اقیانوسی هستند که جریان های دایره ای ایجاد می کنند. گرداب های اقیانوسی با قطری بین 10 تا 500 کیلومتر و طول عمر از روز تا ماه به عنوان گرداب های مقیاس متوسط شناخته می شوند [ 411 ]. آنها دارای گردابه های منسجم و ساختارهای مارپیچی سه بعدی هستند. به دلیل ساختار عمودی و انرژی جنبشی قوی، گردابهای مقیاس متوسط نقش عمدهای در انرژی اقیانوس و انتقال مواد مغذی، به عنوان مثال، گرما، نمک و کربن دارند [ 412 ]. همچنین نشان داده شده است که گردابهای در مقیاس متوسط بر بادهای نزدیک به سطح، ابرها، بارندگی [ 413 ] و اکوسیستم های دریایی در مناطق مجاور تأثیر می گذارند [ 414 ، 415 ]]. بنابراین، شناسایی و ردیابی گردابههای مقیاس متوسط از علاقه علمی زیادی برخوردار است. بر اساس جهت چرخش، گرداب ها را می توان با دو نوع شرایط جوی مرتبط کرد: سیکلون ها (در نیمکره شمالی) و پادسیکلون ها. این نوع گردابهای مقیاس متوسط منجر به دادههای متفاوتی از ماهوارهها میشوند، مانند آنهایی که مربوط به ناهنجاریهای سطح دریا (SLAs) هستند. گرداب های سیکلونیک باعث کاهش SLA و افزایش تراکم زیرسطحی می شوند در حالی که گرداب های ضد سیکلون باعث افزایش SLA و فرورفتگی در تراکم زیرسطحی می شوند. بنابراین، این ویژگیها شناسایی گردابهای مقیاس متوسط را از دادههای ماهوارهای امکانپذیر میسازد. دادههای ماهوارهای مشابه شامل دمای سطح دریا (SST)، غلظت کلروفیل (CHL)، ارتفاع سطح دریا (SSH) و رادار دهانه مصنوعی (SAR) است.
مطالعات اولیه تشخیص گردابی در مقیاس متوسط را می توان به دو دسته تقسیم کرد: روش های مبتنی بر پارامترهای فیزیکی یا مبتنی بر هندسی. روش مبتنی بر پارامتر فیزیکی نیاز به یک آستانه از پیش تعریف شده برای منطقه هدف دارد، به عنوان مثال، همانطور که توسط روش پارامتر Okubo-Weiss (W) [ 416 ، 417 ] تعیین می شود. پارامتر W تغییر شکل و چرخش را در یک نقطه سیال معین اندازه گیری می کند. یک گردابی در مقیاس متوسط بر اساس پارامتر W محاسبه شده و یک آستانه از پیش تعریف شده [ 418 ، 419 ، 420 ] تعریف می شود. یکی دیگر از کاربردهای روش مبتنی بر پارامتر فیزیکی، تحلیل/فیلتر کردن موجک است [ 421 ، 422]. از سوی دیگر، روش مبتنی بر هندسی، گردابها را بر اساس ویژگیهای هندسی واضح، به عنوان مثال، سادهسازی زاویه سیمپیچ [ 423 ، 424 ] شناسایی میکند. برخی از مطالعات [ 425 ، 426 ] ترکیبی از دو روش را پیشنهاد کردند. در مورد مسائل، روش مبتنی بر پارامتر فیزیکی در تعمیم محدود است زیرا آستانه اغلب مختص منطقه است، در حالی که روش مبتنی بر هندسی نمی تواند به راحتی گرداب ها را بدون ویژگی های هندسی واضح تشخیص دهد.
کشف گرداب اقیانوس مبتنی بر یادگیری عمیق اخیر هر دو مشکل را با آموزش با داده ها در مناطق مختلف و استخراج ویژگی های سطح بالا کاهش می دهد. این مطالعات را می توان بر اساس کار انجام شده به انواع مختلفی دسته بندی کرد. نوع اول طبقه بندی است. جورج و همکاران [ 427 ] شارهای گرمای گردابی را از داده های SSH طبقه بندی کرد. نویسندگان رویکردهای مختلف، از جمله رگرسیون خطی، SVM [ 428 ]، VGG [ 44 ] و ResNet [ 46 ] را مقایسه کردند و دریافتند که CNN ها به طور قابل توجهی از سایر تکنیک های داده محور بهتر عمل می کنند. نوع بعدی تشخیص اشیا است. دوو و همکاران [ 429 ] OEDNet (شبکه تشخیص گرداب اقیانوس) را پیشنهاد کرد که بر اساس RetinaNet است [ 59 ]]، برای شناسایی مراکز گردابی از دادههای SLA و آنها از یک الگوریتم خطوط بسته [ 430 ] برای تولید نواحی گردابی استفاده کردند. آخرین نوع، تقسیم بندی معنایی است. این متداول ترین روش مورد استفاده است زیرا مستقیماً خروجی مورد نظر را بدون مراحل اضافی تولید می کند. مطالعات مربوط به استفاده از آن شامل [ 431 ، 432 ، 433 ، 434 ، 435 ] است. Lguensat و همکاران [ 432 ] U-Net [ 100 ] را برای طبقه بندی هر پیکسل به غیر گردابی، گردابی ضد گردابی، یا گردابی گردابی از نقشه های SSH اتخاذ کرد. خو و همکاران هر دو [ 434 ] و لیو و همکاران. [ 433 ] از PSPNet استفاده کرد [ 283] برای شناسایی گرداب ها از داده های مشتق شده از ماهواره. اگرچه این مطالعات شبکه های مختلفی را اتخاذ می کنند، اکثر آنها ویژگی های چند مقیاسی را از ورودی ترکیب می کنند، به عنوان مثال، عملیات هرم فضایی [ 436 ] در PSPNet و FPN [ 58 ] در RetinaNet. این مطالعات عمدتاً بر ادغام در سطح داده تکیه دارند. تحقیقات آینده می تواند از همجوشی در سطح ویژگی و استفاده از داده های چند منبع برای بهبود تشخیص گرداب اقیانوس بهره برداری کند [ 89 ].
6. بحث ها و جهت گیری های تحقیقاتی آینده
در این مقاله، پیشرفتهای اخیر هوش مصنوعی در جغرافیا و ظهور منطقه هیجانانگیز فرا رشتهای GeoAI را بررسی کردیم. ما همچنین مدلهای اصلی شبکه عصبی، از جمله مدلهای شبکه عصبی کاملاً متصل سنتی و ساختارهای عمیقتر جدیدتر CNN، RNN، LSTM و مدلهای ترانسفورماتور را بررسی کردیم. پیشرفت پیشرفت این مدلهای یادگیری عمیق، هوش مصنوعی را برای مطالعات جغرافیایی مناسبتر میکند، که اغلب شامل پردازش حجم زیادی از دادهها و الگوکاوی در مقیاسهای محلی، منطقهای و جهانی است. از آنجایی که پرداختن به تک تک موضوعات این حوزه به سرعت در حال رشد با حجم عظیم ادبیات موجود بسیار دشوار است، ما بررسی خود را بر روی برنامه های GeoAI با استفاده از تصویر و سایر داده های ساختاریافته، به ویژه تصاویر سنجش از دور، تصاویر نمای خیابان و داده های علم زمین متمرکز کردیم. . ما روشهای سنتی و کلاسیک را در هر حوزه کاربردی لمس کردیم، اما به تحقیقات مبتنی بر یادگیری عمیق اخیر اهمیت بیشتری دادیم. در حالی که چالشهای روشهای سنتی در کاربردهای مختلف هنگام تجزیه و تحلیل انواع دادههای مکانی (ساختیافته) متفاوت است، ما از طریق بررسی خود دریافتیم که رویکردهای GeoAI و یادگیری عمیق نقاط قوت عمدهای را برای اهداف زیر ارائه میکنند: (1)تجزیه و تحلیل در مقیاس بزرگ . توانایی GeoAI و رویکردهای یادگیری عمیق برای پردازش داده های بزرگ مکانی و زمانی، آن را از رویکردهای سنتی که برای تجزیه و تحلیل داده های کوچک طراحی شده اند متمایز می کند. این مزیت مدلهای GeoAI را قویتر میکند و نتایج به دست آمده از چنین مدلهایی را نسبت به مدلهای سنتی، که بر روی دادههایی که فقط یک منطقه جغرافیایی کوچک را پوشش میدهند، «آموزش دادهشده» قابل تعمیمتر است. (2) اتوماسیون. استخراج خودکار ویژگی یکی از جنبههای کلیدی GeoAI است که قادر است عوامل محرک (یعنی متغیرهای مستقل) یک رویداد یا پدیده (یعنی متغیرهای وابسته) را مستقیماً از دادههای خام یاد بگیرد. رویکردهای سنتی، از جمله یادگیری ماشینی کم عمق، به تحلیلگر نیاز دارد که متغیرهای مستقل را به صورت دستی تعریف کند. فهرست ناقصی از متغیرهای پذیرفته شده در تحلیل ممکن است ما را از دستیابی به درک جامعی از مسئله تحقیق باز دارد. GeoAI و مدل های یادگیری عمیق با اکتشافات در یک الگوی تحقیقاتی جدید مبتنی بر داده بر این مشکل غلبه می کنند. فرآیند استخراج ویژگی تسهیل شده با اتوماسیون همچنین به یک مدل GeoAI اجازه می دهد تا دانش هیجان انگیز و ناشناخته قبلی را کشف کند. (3) دقت بالاتر. از آنجایی که مدلهای GeoAI میتوانند روابط پیچیده بین متغیرهای وابسته و مستقل را به تصویر بکشند، نتایج تحلیلی، بهویژه زمانی که مدل برای پیشبینی استفاده میشود، معمولاً دقیقتر از روشهای سنتی است، که ممکن است فقط قادر به گرفتن یک خطی یا غیرخطی ساده باشند. رابطه بین متغیرها (4) حساسیت در تشخیص تغییرات ظریف . دقت بالاتر مدلهای GeoAI و توانایی آنها در تشخیص الگوهای پنهان، مزایایی نسبت به رویکردهای سنتی در ثبت تغییرات جزئی در رویدادهای (دینامیک) و تشخیص تفاوتهای ظریف بین رویدادهای مشابه دارد. (5) تحمل نویز در داده ها. بسیاری از رویکردهای آماری سنتی، مانند رگرسیون، برای استفاده در دادههای کوچک و با کیفیت مناسب طراحی شدهاند. مدلهای GeoAI، که میتوانند به طور همزمان مقادیر عظیمی از دادهها را در فرآیند تصمیمگیری خود در نظر بگیرند، در تقطیر ارتباطهای مهم با حضور نویز بهتر هستند. (6) پیشرفت سریع فناوری . توسعه سریع در این زمینه، همانطور که با افزایش تصاعدی نشریات مرتبط با تحقیقات شاهد بود، نشان دهنده شناخت قوی جامعه از ارزش علمی GeoAI است.
از آنجایی که ما در حال عبور از مرحله ” واردات ” در چارچوب پیشنهادی “واردات-انطباق-صادرات” GeoAI هستیم، توسعه تحقیقات بیشتر در مورد تطبیق دامنه حیاتی است.. در این مقاله ما طیف گسترده ای از تحقیقات را که در این مقوله قرار می گیرند، مرور کرده ایم، از جمله انطباق تجزیه و تحلیل مبتنی بر تصویر و یادگیری عمیق برای تجزیه و تحلیل کاربری و پوشش زمین، پیش بینی آب و هوا و خشکسالی، کمی سازی ویژگی های محله و نظارت بر محله. تغییرات، و همچنین شناسایی درک انسان از مکان ها و پیش بینی فعالیت های انسانی. کاربردهای دامنه همچنین شامل تشخیص رویدادهای شدید آب و هوایی، مدلسازی گسترش آتشسوزی، شناسایی و ردیابی گردابههای اقیانوسی در مقیاس متوسط به سمت یک الگوی تحقیقاتی علمی سیستم زمین مبتنی بر دادهمحور است.
این پیشرفتها ما را به مرحله « صادرات » هدایت میکند ، زمانی که دانش حوزه جغرافیایی و اصول فضایی به طور فشرده برای هدایت طراحی مدلهای هوش مصنوعی بهتری که میتوانند در سایر حوزههای علمی مورد استفاده قرار گیرند، استفاده شود و دامنه و تأثیر GeoAI را بیشتر کند [ 437 ]. به عنوان مثال، اخیراً تحقیقات ابتکاری GeoAI را مشاهده کردهایم که یادگیری وزندار جغرافیایی را در مدلهای شبکه عصبی ادغام میکند، به طوری که به جای استخراج یک مقدار یکنواخت، پارامتر آموختهشده میتواند از مکانی به مکان دیگر متفاوت باشد [ 438 ]. کاری مانند این نیاز مهم برای “تفکر محلی” [ 439 ] در تحقیقات GeoAI را برطرف می کند. همچنین تحقیقاتی مانند تحقیقات لی و همکاران. [ 27]، با ایجاد استراتژی برای یادگیری از شمارش، با چالش دستیابی به داده های آموزشی با کیفیت بالا در تجزیه و تحلیل تصویر و زمین مقابله می کند. نویسندگان از قانون اول توبلر به عنوان اصل برای تبدیل تصاویر دو بعدی به داده های توالی 1 بعدی استفاده می کنند تا بتوان پیوستگی فضایی در داده های اصلی را تا حداکثر میزان حفظ کرد. آنها سپس یک مدل LSTM پیشرفته را توسعه دادند که میتواند دنباله 1 بعدی را بگیرد و بدون نیاز به برچسبهای جعبه مرزی مورد استفاده در مدلهای عمومی تشخیص اشیا برای دستیابی به پیشبینی با دقت بالا با نظارت ضعیف، محلیسازی شی را انجام دهد. تحقیقات از این نوع به نیاز حیاتی برای تفکر فضایی میپردازد [ 440]. تحقیقات آتی که نشاندهنده یکپارچگی عمیق بین جغرافیا و هوش مصنوعی است، که میتواند به حل بهتر مسائل جغرافیایی و مشکلات عمومی هوش مصنوعی کمک کند، کمک قابلتوجهی به ایجاد پایههای نظری و روششناختی GeoAI و گسترش تأثیر آن فراتر از جغرافیا خواهد کرد.
دیگر نگرانیهای شناخته شده شامل ساخت مجموعه دادههای معیار GeoAI، مدلهای قوی و قابل توضیح، ترکیب و پردازش مجموعههای دادههای جغرافیایی چند منبعی، و فعال کردن تحقیقات GeoAI مبتنی بر دانش [ 17 ، 437 ، 441 ، 442]. در سال های اخیر، توجه فزاینده ای به مسائل اخلاقی در تحقیقات GeoAI شده است. از آنجایی که دادههای مکانی به طور بالقوه حاوی اطلاعات شخصی هستند که میتواند برای نفوذ به حریم خصوصی فرد، به عنوان مثال، با پیشبینی رفتار سفر و مکانهای خانه و محل کار استفاده شود. از این رو، محافظت از داده های مکانی در برابر سوء استفاده و توسعه مدل های GeoAI قوی با افزایش شفافیت و تصمیم گیری بی طرفانه نه تنها برای محققان GeoAI و کاربران آن، بلکه برای عموم نیز حیاتی است [ 443 ]. به این ترتیب، ما میتوانیم به عنوان یک جامعه با هم همکاری کنیم تا در توسعه یک اکوسیستم GeoAI سالم و پایدار به نفع کل جامعه مشارکت کنیم [ 12 ]]. در این راستا، ما امیدواریم که محققانی که قصد دستیابی به اهداف فوق را در کار خود دارند، بتوانند به این مقاله مروری برای شناسایی ادبیات مهم و مرتبط GeoAI برای شروع تحقیقات خود مراجعه کنند. ما همچنین امیدواریم که این مقاله به یک نقطه بازرسی مهم برای زمینه GeoAI تبدیل شود و کاربردهای عمیق تر GeoAI را در حوزه های زیست محیطی و علوم اجتماعی تشویق کند.
منابع
- راسل، اس جی. Norvig, P. Artificial Intelligence: A Modern Approach ; پیرسون: هوبوکن، نیوجرسی، ایالات متحده آمریکا، 2016. [ Google Scholar ]
- آپنزلر، تی. انقلاب هوش مصنوعی در علم. Science 2017 ، 357 ، 16-17. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- ژو، ز. کرنز، اس. لی، ال. زارع، RN; رایلی، ص. بهینه سازی مولکول ها از طریق یادگیری تقویتی عمیق. علمی جمهوری 2019 ، 9 ، 10752. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- هان، جی. جنتزن، ا. Weinan، E. حل معادلات دیفرانسیل جزئی با ابعاد بالا با استفاده از یادگیری عمیق. Proc. Natl. آکادمی علمی ایالات متحده آمریکا 2018 ، 115 ، 8505–8510. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- ریو، جی. کیم، HU; Lee, SY Deep Learning پیش بینی تداخلات دارو-دارو و دارو-غذا را بهبود می بخشد. Proc. Natl. آکادمی علمی USA 2018 ، 115 ، E4304–E4311. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- یارکونی، ت. Westfall, J. انتخاب پیشبینی در مقابل تبیین در روانشناسی: درسهایی از یادگیری ماشین. چشم انداز روانی علمی 2017 ، 12 ، 1100-1122. [ Google Scholar ] [ CrossRef ]
- سنگ مرمر، ق. وین، جی. کوردینگ، KP به سوی ادغام یادگیری عمیق و علوم اعصاب. جلو. محاسبه کنید. نوروسک. 2016 ، 10 ، 94. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لانوس، اف. ما، س. لی، ن. Collett، TE; لی، سی.-ال. روانبخش، س. ماندلبام، آر. Póczos, B. CMU DeepLens: یادگیری عمیق برای یافتن لنزهای قوی مبتنی بر تصویر کهکشان-کهکشان. دوشنبه نه. آر.آسترون. Soc. 2018 ، 473 ، 3895–3906. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- اپن شاو، اس. Openshaw, C. Artificial Intelligence in Geography ; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1997; شابک 0-471-96991-5. [ Google Scholar ]
- Couclelis، H. ژئومحاسبات و فضا. محیط زیست طرح. B طرح. دس 1998 ، 25 ، 41-47. [ Google Scholar ] [ CrossRef ]
- لی، دبلیو. باتی، م. Goodchild، MF زمان واقعی GIS برای شهرهای هوشمند. بین المللی جی. جئوگر. Inf. علمی 2020 ، 34 ، 311-324. [ Google Scholar ] [ CrossRef ]
- لی، دبلیو. Arundel، ST GeoAI و آینده تجزیه و تحلیل فضایی. در تفکر جدید درباره GIS ; Li, B., Shi, X., Lin, H., Zhu, AX, Eds. Springer: سنگاپور، 2022. [ Google Scholar ]
- مائو، اچ. هو، ی. کار، بی. گائو، اس. گزارش کارگاه آموزشی McKenzie, G. GeoAI 2017: اولین کارگاه بین المللی ACM SIGSPATIAL در GeoAI: @AI and Deep Learning for Geographic Knowledge Discovery: Redondo Beach, CA, USA-7 نوامبر 2016. ACM Sigspatial Spec. 2017 ، 9 ، 25. [ Google Scholar ] [ CrossRef ]
- Tobler, WR یک فیلم کامپیوتری شبیه سازی رشد شهری در منطقه دیترویت. اقتصاد Geogr. 1970 ، 46 ، 234-240. [ Google Scholar ] [ CrossRef ]
- Goodchild، MF اعتبار و سودمندی قوانین در علم اطلاعات جغرافیایی و جغرافیا. ان دانشیار صبح. Geogr. 2004 ، 94 ، 300-303. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یانوویچ، ک. گائو، اس. مک کنزی، جی. هو، ی. Bhaduri، B. GeoAI: تکنیکهای هوش مصنوعی صریح فضایی برای کشف دانش جغرافیایی و فراتر از آن. بین المللی جی. جئوگر. Inf. علمی 2020 ، 34 ، 625-636. [ Google Scholar ] [ CrossRef ]
- Li، W. GeoAI و یادگیری عمیق. در دایره المعارف بین المللی جغرافیا: مردم، زمین، محیط زیست و فناوری ؛ ریچاردسون، دی.، اد. John Wiley & Sons, Ltd.: Chichester, UK, 2021. [ Google Scholar ]
- ژانگ، ال. ژانگ، ال. Du, B. یادگیری عمیق برای داده های سنجش از دور: یک آموزش فنی در مورد وضعیت هنر. IEEE Geosci. سنسور از راه دور Mag. 2016 ، 4 ، 22-40. [ Google Scholar ] [ CrossRef ]
- آنگلوف، دی. دولونگ، سی. فیلیپ، دی. فروه، سی. لافون، اس. لیون، آر. اوگال، ا. وینسنت، ال. ویور، جی. نمای خیابان گوگل: ثبت جهان در سطح خیابان. کامپیوتر 2010 ، 43 ، 32-38. [ Google Scholar ] [ CrossRef ]
- لیو، ی. لیو، ایکس. گائو، اس. گونگ، ال. کانگ، سی. ژی، ی. چی، جی. شی، ال. حس اجتماعی: رویکردی جدید برای درک محیط های اجتماعی-اقتصادی ما. ان دانشیار صبح. Geogr. 2015 ، 105 ، 512-530. [ Google Scholar ] [ CrossRef ]
- ژانگ، اف. وو، ال. زو، دی. لیو، ی. حس اجتماعی از تصویرسازی سطح خیابان: مطالعه موردی در یادگیری الگوهای تحرک شهری فضایی-زمانی. ISPRS J. Photogramm. Remote Sens. 2019 ، 153 ، 48–58. [ Google Scholar ] [ CrossRef ]
- Sui, D. فرصت ها و موانع برای Open GIS. ترانس. GIS 2014 ، 18 ، 1-24. [ Google Scholar ] [ CrossRef ]
- آروندل، ST; Thiem، PT; Constance، EW استخراج خودکار خطوط هیدروگرافیک اصلاح شده برای ایالات متحده محدود: سازمان زمین شناسی ایالات متحده محصول Topo ایالات متحده. کارتوگر. Geogr. Inf. علمی 2018 ، 45 ، 31-55. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یوزری، EL; آروندل، ST; ریش تراش، ای. استانیسلاوسکی، ال. تیم، پی. Varanka، D. GeoAI در سازمان زمین شناسی ایالات متحده برای نقشه برداری توپوگرافی. ترانس. GIS 2021 ، 26 ، 25-40. [ Google Scholar ] [ CrossRef ]
- لی، دبلیو. راسکین، آر. Goodchild، اندازهگیری تشابه معنایی MF بر اساس دانش کاوی: یک رویکرد شبکه عصبی مصنوعی. بین المللی جی. جئوگر. Inf. علمی 2012 ، 26 ، 1415-1435. [ Google Scholar ] [ CrossRef ]
- Sherstinsky، A. مبانی شبکه عصبی بازگشتی (RNN) و شبکه حافظه کوتاه مدت بلند مدت (LSTM). فیزیک D پدیده غیرخطی. 2020 ، 404 ، 132306. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- لی، دبلیو. Hsu، C.-Y.; قانون اول Hu، M. Tobler در GeoAI: یک مدل یادگیری عمیق فضایی صریح برای تشخیص ویژگی های زمین تحت نظارت ضعیف. ان صبح. دانشیار Geogr. 2021 ، 111 ، 1887-1905. [ Google Scholar ] [ CrossRef ]
- واسوانی، ع. Shazeer, N. پارمار، ن. Uszkoreit، J. جونز، ال. گومز، AN; قیصر، Ł. Polosukhin، I. توجه تمام چیزی است که شما نیاز دارید. Adv. عصبی Inf. روند. سیستم 2017 30 . _ در دسترس آنلاین: https://proceedings.neurips.cc/paper/2017 (در 1 مارس 2022 قابل دسترسی است).
- پاسکانو، آر. گلچهره، سی. چو، ک. Bengio، Y. نحوه ساخت شبکه های عصبی عمیق بازگشتی. arXiv 2013 ، arXiv:1312.6026. [ Google Scholar ]
- شرلی، EF; کومار، الف. تشخیص و پیشبینی تغییرات کاربری و پوشش زمین با استفاده از یادگیری عمیق. در نرم افزار و شبکه های ارتباطی ; Springer: برلین/هایدلبرگ، آلمان، 2021؛ صص 359-367. [ Google Scholar ]
- Hsu، C.-Y.; لی، دبلیو. یادگیری از شمارش: استفاده از طبقهبندی زمانی برای محلیسازی و تشخیص اشیاء تحت نظارت ضعیف. در مجموعه مقالات سی و یکمین کنفرانس بینایی ماشین بریتانیا 2020، BMVC 2020، رویداد مجازی، بریتانیا، 7 تا 10 سپتامبر 2020؛ انتشارات BMVA: لندن، بریتانیا، 2020. [ Google Scholar ]
- دوسوویتسکی، آ. بیر، ال. کولسنیکوف، آ. وایسنبورن، دی. ژای، ایکس. Unterthiner، T. دهقانی، م. مایندرر، م. هیگلد، جی. Gelly، S. یک تصویر ارزش 16×16 کلمه دارد: ترانسفورماتورها برای تشخیص تصویر در مقیاس. arXiv 2020 ، arXiv:2010.11929. [ Google Scholar ]
- لیو، ز. مائو، اچ. وو، سی.-ای. فایختنهوفر، سی. دارل، تی. Xie, S. A ConvNet برای سال 2020. arXiv 2020 ، arXiv:2201.03545. [ Google Scholar ]
- توزی، ر. لوپس، آ. Bousquet, P. یک آشکارساز لبه آماری و هندسی برای تصاویر SAR. IEEE Trans. Geosci. Remote Sens. 1988 , 26 , 764-773. [ Google Scholar ] [ CrossRef ]
- علی، م. Clausi, D. استفاده از آشکارساز لبه Canny برای استخراج ویژگی و بهبود تصاویر سنجش از دور. در IGARSS 2001: Scanning the Present and Resolving the Future، مجموعه مقالات سمپوزیوم بین المللی زمین شناسی و سنجش از دور IEEE 2001 (شماره گربه 01CH37217)، سیدنی، NSW، استرالیا، 9-13 جولای 2001 ؛ IEEE: نیویورک، نیویورک، ایالات متحده آمریکا، 2001; جلد 5، ص 2298–2300. [ Google Scholar ]
- Lowe, G. Sift-the Scale Feature Invariant Transform. بین المللی J. 2004 , 2 , 2. [ Google Scholar ]
- دلال، ن. Triggs، B. هیستوگرام گرادیان های جهت یافته برای تشخیص انسان. در مجموعه مقالات کنفرانس IEEE Computer Society در سال 2005 در مورد دید رایانه و تشخیص الگو (CVPR’05)، سن دیگو، CA، ایالات متحده آمریکا، 20-25 ژوئن 2005; IEEE: نیویورک، نیویورک، ایالات متحده آمریکا، 2005; جلد 1، ص 886–893. [ Google Scholar ]
- فی فی، ال. پرونا، پی. یک مدل سلسله مراتبی بیزی برای یادگیری دسته بندی های صحنه طبیعی. در مجموعه مقالات کنفرانس IEEE Computer Society در سال 2005 در مورد دید رایانه و تشخیص الگو (CVPR’05)، سن دیگو، CA، ایالات متحده آمریکا، 20-25 ژوئن 2005; IEEE: نیویورک، نیویورک، ایالات متحده آمریکا، 2005; جلد 2، ص 524–531. [ Google Scholar ]
- LeCun، Y.; بنژیو، ی. هینتون، جی. یادگیری عمیق. طبیعت 2015 ، 521 ، 436-444. [ Google Scholar ] [ CrossRef ]
- او، ک. گیوکسری، جی. دلار، پی. Girshick, R. Mask R-CNN. در مجموعه مقالات کنفرانس بین المللی IEEE در بینایی کامپیوتر، ونیز، ایتالیا، 22 تا 29 اکتبر 2017؛ صفحات 2961-2969. [ Google Scholar ]
- چن، ک. فو، ک. یان، م. گائو، ایکس. سان، ایکس. وی، ایکس. تقسیم بندی معنایی تصاویر هوایی با شبکه های عصبی پیچیده. IEEE Geosci. سنسور از راه دور Lett. 2018 ، 15 ، 173-177. [ Google Scholar ] [ CrossRef ]
- دنگ، ج. دونگ، دبلیو. سوچر، آر. لی، ال.-جی. لی، ک. Fei-Fei, L. ImageNet: A Large-Scale Hierarchical Image Database ; IEEE: نیویورک، نیویورک، ایالات متحده آمریکا، 2009; ص 248-255. [ Google Scholar ]
- کریژفسکی، آ. سوتسکور، آی. هینتون، GE ImageNet طبقه بندی با شبکه های عصبی پیچیده عمیق. Adv. عصبی Inf. روند. سیستم 2012 ، 25 ، 1097-1105. [ Google Scholar ] [ CrossRef ]
- سیمونیان، ک. زیسرمن، الف. شبکه های پیچیده بسیار عمیق برای تشخیص تصویر در مقیاس بزرگ. arXiv 2014 ، arXiv:1409.1556. [ Google Scholar ]
- میلتون-بارکر، A. Inception V3 Deep Convolutional Architecture برای طبقه بندی لوسمی حاد میلوئید/لنفوبلاستیک. Intel.com 2019. در دسترس آنلاین: https://www.intel.com/content/www/us/en/developer/articles/technical/inception-v3-deep-convolutional-architecture-for-classifying-acute-myeloidlymphoblastic.html (دسترسی در 1 مارس 2022).
- او، ک. ژانگ، ایکس. رن، اس. Sun، J. یادگیری باقیمانده عمیق برای تشخیص تصویر. در مجموعه مقالات کنفرانس IEEE در مورد دید کامپیوتری و تشخیص الگو، لاس وگاس، NV، ایالات متحده، 27-30 ژوئن 2016. صص 770-778. [ Google Scholar ]
- دای، ز. لیو، اچ. لی، کیو. Tan, M. Coatnet: Marrying Convolution and Attention for All Sizes Data. Adv. عصبی Inf. روند. سیستم 2021 ، 34 ، 3965-3977. [ Google Scholar ]
- هوانگ، جی. لیو، ز. ون در ماتن، ال. واینبرگر، شبکههای کانولوشن با اتصال متراکم KQ. در مجموعه مقالات کنفرانس IEEE در مورد دید رایانه و تشخیص الگو، هونولولو، HI، ایالات متحده آمریکا، 21 تا 26 ژوئیه 2017؛ صص 4700–4708. [ Google Scholar ]
- لنگ، ز. تان، م. لیو، سی. Cubuk، ED; شی، ج. چنگ، اس. Anguelov، D. PolyLoss: دیدگاه بسط چند جمله ای توابع از دست دادن طبقه بندی. arXiv 2021 ، arXiv:2204.12511. [ Google Scholar ]
- فام، اچ. دای، ز. Xie، Q. Le, QV Meta Pseudo Labels. در مجموعه مقالات کنفرانس IEEE/CVF در مورد دید رایانه و تشخیص الگو، نشویل، TN، ایالات متحده، 20-25 ژوئن 2021؛ صص 11557–11568. [ Google Scholar ]
- کومار، ا. آبیشک، ک. کومار سینگ، ا. نورکار، پ. چاندان، م. بهیرود، س. پاتل، دی. Busnel، Y. طبقهبندی چند برچسبی تصاویر ماهوارهای سنجش از راه دور. ترانس. ظهور. مخابرات تکنولوژی 2021 , 32 , e3988. [ Google Scholar ] [ CrossRef ]
- یانگ، ی. Newsam، S. Bag-of-Visual-Words and Spatial Extensions for Spatial Extensions for Land-Use Classification. در مجموعه مقالات هجدهمین کنفرانس بین المللی SIGSPATIAL در مورد پیشرفت در سیستم های اطلاعات جغرافیایی، سن خوزه، کالیفرنیا، ایالات متحده آمریکا، 2 تا 5 نوامبر 2010. ص 270-279. [ Google Scholar ]
- خان، ن. چاودوری، یو. بانرجی، بی. Chaudhuri، S. Graph Convolutional Network for Multi-Label VHR Remote Sensing Scene Recognition. محاسبات عصبی 2019 ، 357 ، 36-46. [ Google Scholar ] [ CrossRef ]
- لی، ی. چن، آر. ژانگ، ی. ژانگ، ام. Chen, L. طبقهبندی صحنه تصویر سنجش از دور چند برچسبی با ترکیب یک شبکه عصبی کانولوشن و یک شبکه عصبی نمودار. Remote Sens. 2020 , 12 , 4003. [ Google Scholar ] [ CrossRef ]
- سرمانت، پ. ایگن، دی. ژانگ، ایکس. متیو، ام. فرگوس، آر. LeCun, Y. Overfeat: شناسایی یکپارچه، محلی سازی و شناسایی با استفاده از شبکه های کانولوشن. arXiv 2013 , arXiv:1312.6229. [ Google Scholar ]
- رن، اس. او، ک. گیرشیک، آر. Sun, J. Faster R-CNN: Towards towards realtime object detection with region proposal networks. Adv. عصبی Inf. روند. سیستم 2015 ، 28 . در دسترس آنلاین: https://arxiv.org/abs/1506.01497 (در 1 مارس 2022 قابل دسترسی است). [ CrossRef ][ نسخه سبز ]
- دای، جی. لی، ی. او، ک. Sun، J. R-FCN: تشخیص شیء از طریق شبکه های کاملاً پیچیده مبتنی بر منطقه. Adv. عصبی Inf. روند. سیستم 2016 , 29 . در دسترس آنلاین: https://arxiv.org/abs/1605.06409 (در 1 مارس 2022 قابل دسترسی است).
- لین، تی.-ای. دلار، پی. گیرشیک، آر. او، ک. حریهاران، بی. Belongie, S. ویژگی شبکه های هرمی برای تشخیص اشیا. در مجموعه مقالات کنفرانس IEEE در مورد دید رایانه و تشخیص الگو، هونولولو، HI، ایالات متحده آمریکا، 21 تا 26 ژوئیه 2017؛ IEEE Computer Society: Silver Spring, MD, USA, 2017; صص 2117–2125. [ Google Scholar ]
- لین، تی.-ای. گویال، پ. گیرشیک، آر. او، ک. Dollár، P. از دست دادن کانونی برای تشخیص اشیاء متراکم. در مجموعه مقالات کنفرانس بین المللی IEEE در بینایی کامپیوتر، ونیز، ایتالیا، 22 تا 29 اکتبر 2017؛ IEEE Computer Society: Silver Spring, MD, USA, 2017; صفحات 2980-2988. [ Google Scholar ]
- بوچکوفسکی، آ. وانگ، سی.-ای. Liao, H.-YM YOLOv4: سرعت و دقت بهینه تشخیص شی. arXiv 2020 ، arXiv:2004.10934. [ Google Scholar ]
- ردمون، جی. فرهادی، A. YOLOv3: یک پیشرفت افزایشی. arXiv 2018 , arXiv:1804.02767. [ Google Scholar ]
- ردمون، جی. فرهادی، A. YOLO9000: بهتر، سریعتر، قوی تر. در مجموعه مقالات کنفرانس IEEE در مورد دید رایانه و تشخیص الگو، هونولولو، HI، ایالات متحده آمریکا، 21 تا 26 ژوئیه 2017؛ IEEE Computer Society: Silver Spring, MD, USA, 2017; صص 7263-7271. [ Google Scholar ]
- ردمون، جی. دیووالا، س. گیرشیک، آر. فرهادی، الف. شما فقط یک بار نگاه می کنید: یکپارچه، تشخیص شی در زمان واقعی. در مجموعه مقالات کنفرانس IEEE در مورد دید کامپیوتری و تشخیص الگو، لاس وگاس، NV، ایالات متحده، 27-30 ژوئن 2016. IEEE Computer Society: Silver Spring, MD, USA, 2017; صص 779-788. [ Google Scholar ]
- لیو، دبلیو. آنگلوف، دی. ایرهان، د. سگدی، سی. رید، اس. فو، سی.-ای. برگ، AC SSD: آشکارساز مولتی باکس تک شات. در مجموعه مقالات کنفرانس اروپایی بینایی کامپیوتر، لاس وگاس، NV، ایالات متحده آمریکا، 27-30 ژوئن 2016. Springer: برلین/هایدلبرگ، آلمان، 2016; ص 21-37. [ Google Scholar ]
- ژانگ، اس. ون، ال. بیان، ایکس. لی، ز. Li، SZ شبکه عصبی پالایش تک شات برای تشخیص اشیا. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 23 ژوئن 2018؛ IEEE Computer Society: Silver Spring, MD, USA, 2017; صص 4203-4212. [ Google Scholar ]
- ژائو، کیو. شنگ، تی. وانگ، ی. تانگ، ز. چن، ی. کای، ال. Ling، H. M2det: آشکارساز شی تک شات بر اساس شبکه هرمی ویژگی چند سطحی. در مجموعه مقالات کنفرانس AAAI در مورد هوش مصنوعی، هونولولو، HI، ایالات متحده، 27 ژانویه تا 1 فوریه 2019؛ مطبوعات AAAI: پالو آلتو، کالیفرنیا، ایالات متحده آمریکا، 2019؛ جلد 33، ص 9259–9266. [ Google Scholar ]
- بارت، EC مقدمه ای بر سنجش از دور محیطی . Routledge: نیویورک، نیویورک، ایالات متحده آمریکا، 2013; شابک 0-203-76103-0. [ Google Scholar ]
- کاموسوکو، سی. اهمیت سنجش از دور و مدلسازی تغییر زمین برای مطالعات شهرنشینی. در توسعه شهری در آسیا و آفریقا ; Springer: برلین/هایدلبرگ، آلمان، 2017; صص 3-10. [ Google Scholar ]
- Bejiga, MB; زگادا، ا. نوفیج، ا. Melgani، F. یک رویکرد شبکه عصبی کانولوشن برای کمک به عملیات جستجو و نجات بهمن با تصاویر پهپاد. Remote Sens. 2017 , 9 , 100. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- توماشفسکی، بی. محمد، FA; حمد، ی. آگاهی از وضعیت پناهندگان: کمپ ها و فراتر از آن. Procedia Eng. 2015 ، 107 ، 41-53. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژو، ال. یان، اچ. شان، ی. ژنگ، سی. لیو، ی. زو، ایکس. Qiao، B. تشخیص هواپیما برای تصاویر سنجش از دور بر اساس شبکههای عصبی کانولوشنال عمیق. جی الکتر. محاسبه کنید. مهندس 2021 ، 2021 ، 4685644. [ Google Scholar ] [ CrossRef ]
- جاناکیرامایا، بی. کالیانی، گ. کارونا، ا. پراساد، ال. کریشنا، ام. تشخیص شی نظامی در دفاع با استفاده از شبکه های کپسول چند سطحی. محاسبات نرم. 2021 ، 1-15. [ Google Scholar ] [ CrossRef ]
- لی، دبلیو. Hsu، C.-Y. شناسایی خودکار ویژگی زمین از تصاویر سنجش از راه دور: رویکرد یادگیری عمیق. بین المللی جی. جئوگر. Inf. علمی 2020 ، 34 ، 637-660. [ Google Scholar ] [ CrossRef ]
- دینگ، جی. زو، ن. لانگ، ی. Xia، G.-S. Lu, Q. ترانسفورماتور RoI یادگیری برای تشخیص اجسام جهت دار در تصاویر هوایی. arXiv 2018 , arXiv:1812.00155. [ Google Scholar ]
- کیان، دبلیو. یانگ، ایکس. پنگ، اس. گوا، ی. Yan, J. یادگیری مدوله شده برای تشخیص اشیاء چرخشی. arXiv 2019 ، arXiv:1911.08299. [ Google Scholar ]
- ژانگ، ز. چن، ایکس. لیو، جی. Zhou، K. شبکه ویژگی چرخشی برای تشخیص اشیاء چند جهتی. arXiv 2019 ، arXiv:1903.09839. [ Google Scholar ]
- فو، ک. چانگ، ز. ژانگ، ی. خو، جی. ژانگ، ک. Sun، X. شبکه عصبی کانولوشنال و چند مقیاسی برای تشخیص اشیا در تصاویر سنجش از دور. ISPRS J. Photogramm. Remote Sens. 2020 , 161 , 294–308. [ Google Scholar ] [ CrossRef ]
- یانگ، ایکس. Yan, J. تشخیص شی دلخواه گرا با برچسب صاف دایره ای . Springer: برلین/هایدلبرگ، آلمان، 2020؛ صص 677-694. [ Google Scholar ]
- هان، جی. دینگ، جی. زو، ن. Xia، G.-S. Redet: یک آشکارساز معادل چرخش برای تشخیص اشیاء هوایی. در مجموعه مقالات کنفرانس IEEE/CVF در مورد دید رایانه و تشخیص الگو، نشویل، TN، ایالات متحده، 20-25 ژوئن 2021؛ انجمن کامپیوتر IEEE: Silver Spring, MD, USA, 2021; صص 2786-2795. [ Google Scholar ]
- لانگ، ی. گونگ، ی. شیائو، ز. لیو، کیو. محلیسازی دقیق شی در تصاویر سنجش از دور بر اساس شبکههای عصبی کانولوشنال. IEEE Trans. Geosci. Remote Sens. 2017 , 55 , 2486–2498. [ Google Scholar ] [ CrossRef ]
- ژونگ، ی. هان، ایکس. Zhang، L. تشخیص شی چند طبقه جغرافیایی بر اساس یک چارچوب متعادل کننده حساس به موقعیت برای تصاویر سنجش از دور با وضوح فضایی بالا. ISPRS J. Photogramm. Remote Sens. 2018 , 138 , 281–294. [ Google Scholar ] [ CrossRef ]
- چنگ، جی. یانگ، جی. گائو، دی. گوا، ال. Han, J. پیشنهادهای با کیفیت بالا برای تشخیص اشیاء تحت نظارت ضعیف. IEEE Trans. فرآیند تصویر 2020 ، 29 ، 5794-5804. [ Google Scholar ] [ CrossRef ]
- ژونگ، کیو. لی، سی. ژانگ، ی. زی، دی. یانگ، اس. Pu, S. Cascade Region Proposal and Global Context for Deep Object Detection. محاسبات عصبی 2020 ، 395 ، 170-177. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژو، پی. چنگ، جی. لیو، ز. اتوبوس.؛ Hu, X. تشخیص هدف با نظارت ضعیف در تصاویر سنجش از راه دور بر اساس ویژگیهای عمیق انتقال یافته و راهاندازی منفی. چند بعدی. سیستم فرآیند سیگنال 2016 ، 27 ، 925-944. [ Google Scholar ] [ CrossRef ]
- زنگ، ز. لیو، بی. فو، جی. چائو، اچ. Zhang، L. Wsod2: یادگیری تقطیر شیء از پایین به بالا و بالا به پایین برای تشخیص اشیاء تحت نظارت ضعیف. در مجموعه مقالات کنفرانس بین المللی IEEE/CVF در بینایی کامپیوتر، سئول، کره، 27 اکتبر تا 2 نوامبر 2019؛ IEEE Computer Society: Silver Spring، MD، ایالات متحده آمریکا، 2019؛ صص 8292-8300. [ Google Scholar ]
- رن، ز. یو، ز. یانگ، ایکس. لیو، M.-Y. لی، YJ; شوینگ، AG; کاوتز، جی. تشخیص اشیاء نظارت شده بر روی نمونه، متمرکز بر زمینه و حافظه کارآمد. در مجموعه مقالات کنفرانس IEEE/CVF 2020 در مورد دید رایانه و تشخیص الگو (CVPR)، سیاتل، WA، ایالات متحده آمریکا، 13 تا 19 ژوئن 2020؛ انجمن کامپیوتر IEEE: Silver Spring، MD، ایالات متحده آمریکا، 2020؛ صفحات 10595-10604. [ Google Scholar ]
- هوانگ، ز. زو، ی. کومار، BVKV; Huang, D. خود تقطیر جامع توجه برای تشخیص اشیاء تحت نظارت ضعیف. در مجموعه مقالات پیشرفتها در سیستمهای پردازش اطلاعات عصبی، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 30 نوامبر تا 3 دسامبر 1992. Larochelle, H., Ranzato, M., Hadsell, R., Balcan, MF, Lin, H., Eds. Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 2020. جلد 33، ص 16797–16807. [ Google Scholar ]
- زنگ، ی. ژوگه، ی. لو، اچ. ژانگ، ال. کیان، م. Yu, Y. نظارت ضعیف چند منبعی برای تشخیص برجسته بودن. در مجموعه مقالات کنفرانس IEEE/CVF در مورد دید کامپیوتری و تشخیص الگو، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 15 تا 20 ژوئن 2019؛ IEEE Computer Society: Silver Spring، MD، ایالات متحده آمریکا، 2019؛ ص 6074–6083. [ Google Scholar ]
- وانگ، اس. Li، W. GeoAI در تجزیه و تحلیل زمین: فعال کردن یادگیری عمیق چند منبعی و ترکیب داده ها برای تشخیص ویژگی های طبیعی. محاسبه کنید. محیط زیست سیستم شهری 2021 ، 90 ، 101715. [ Google Scholar ] [ CrossRef ]
- هوانگ، آر. پدیم، ج. Chen, C. YOLO-LITE: الگوریتم تشخیص شی در زمان واقعی برای رایانههای غیر GPU بهینه شده است. در مجموعه مقالات کنفرانس بینالمللی IEEE 2018 در مورد دادههای بزرگ (Big Data)، سیاتل، WA، ایالات متحده، 10-13 دسامبر 2018؛ IEEE: Silver Spring, MD, USA, 2018; صص 2503-2510. [ Google Scholar ]
- وانگ، RJ; لی، ایکس. Ling، CX Pelee: یک سیستم تشخیص شی در زمان واقعی در دستگاه های تلفن همراه. Adv. عصبی Inf. روند. سیستم 2018 , 31 . در دسترس آنلاین: https://www.semanticscholar.org/paper/Pelee%3A-A-Real-Time-Object-Detection-System-on-Wang-Li/919fa3a954a604d1679f3b591b60e40f0e6a050c (دسترسی در 21 مارس 2).
- جیانگ، ز. ژائو، ال. لی، اس. Jia, Y. روش تشخیص شی در زمان واقعی بر اساس YOLOv4-Tiny بهبود یافته. arXiv 2020 ، arXiv:2011.04244. [ Google Scholar ]
- لی، ک. وان، جی. چنگ، جی. منگ، ال. Han, J. تشخیص شیء در تصاویر سنجش از دور نوری: یک بررسی و یک معیار جدید. ISPRS J. Photogramm. Remote Sens. 2020 , 159 , 296–307. [ Google Scholar ] [ CrossRef ]
- بنداری، ع.ک. کومار، ا. سینگ، GK اصلاح شده مستعمره زنبورهای مصنوعی مبتنی بر آستانه محاسباتی کارآمد چندسطحی برای تقسیم بندی تصاویر ماهواره ای با استفاده از توابع کاپور، اوتسو و تسالیس. سیستم خبره Appl. 2015 ، 42 ، 1573-1601. [ Google Scholar ] [ CrossRef ]
- میتال، اچ. Saraswat، M. یک تقسیم بندی آستانه تصویر چند سطحی بهینه با استفاده از هیستوگرام دو بعدی و الگوریتم جستجوی گرانشی Kbest نمایی. مهندس Appl. آرتیف. هوشمند 2018 ، 71 ، 226-235. [ Google Scholar ] [ CrossRef ]
- الامری، اس.اس. کالیانکار، ن. خمیتکار، اس. تقسیم بندی تصویر با استفاده از تشخیص لبه. بین المللی جی. کامپیوتر. علمی مهندس 2010 ، 2 ، 804-807. [ Google Scholar ]
- متوکریشنان، ر. Radha، M. تکنیکهای تشخیص لبه برای تقسیمبندی تصویر. بین المللی جی. کامپیوتر. علمی Inf. تکنولوژی 2011 ، 3 ، 259. [ Google Scholar ] [ CrossRef ]
- بوز، اس. موکرجی، ا. چاکرابورتی، اس. سامانتا، س. Dey, N. تقسیم بندی تصویر موازی با استفاده از الگوریتم چند رشته ای و k-means. در مجموعه مقالات کنفرانس بین المللی IEEE 2013 در زمینه تحقیقات محاسباتی و هوش محاسباتی، Enathi، هند، 26-28 دسامبر 2013. IEEE: Silver Spring, MD, USA, 2013; صص 1-5. [ Google Scholar ]
- کاپور، اس. زیا، من. سینگال، سی. Nanda، SJ الگوریتم خوشهبندی خودکار مبتنی بر بهینهساز گرگ خاکستری برای تقسیمبندی تصاویر ماهوارهای. Procedia Comput. علمی 2017 ، 115 ، 415-422. [ Google Scholar ] [ CrossRef ]
- رونبرگر، او. فیشر، پی. Brox، T. U-Net: شبکه های کانولوشن برای تقسیم بندی تصویر زیست پزشکی. در مجموعه مقالات کنفرانس بین المللی محاسبات تصویر پزشکی و مداخله به کمک کامپیوتر، مونیخ، آلمان، 5 تا 9 اکتبر 2015. Springer: برلین/هایدلبرگ، آلمان، 2015; صص 234-241. [ Google Scholar ]
- لانگ، جی. شلهامر، ای. دارل، تی. شبکه های کاملاً پیچیده برای تقسیم بندی معنایی. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، بوستون، MA، ایالات متحده آمریکا، 7 تا 12 ژوئن 2015. IEEE Computer Society: Silver Spring, MD, USA, 2015; صص 3431–3440. [ Google Scholar ]
- بدرینارایانان، وی. کندال، ا. Cipolla، R. Segnet: معماری رمزگذار-رمزگشای پیچیده پیچیده برای تقسیمبندی تصویر. IEEE Trans. الگوی مقعدی ماخ هوشمند 2017 ، 39 ، 2481-2495. [ Google Scholar ] [ CrossRef ]
- چن، L.-C.; پاپاندرو، جی. کوکینوس، آی. مورفی، ک. Yuille، تقسیمبندی تصویر معنایی AL با شبکههای پیچیده عمیق و Crfهای کاملاً متصل. arXiv 2014 ، arXiv:1412.7062. [ Google Scholar ]
- چن، L.-C.; پاپاندرو، جی. کوکینوس، آی. مورفی، ک. Yuille، AL Deeplab: Semantic Segmentation with Deep Convolutional Nets، Atrous Convolution و Crfs کاملاً متصل. IEEE Trans. الگوی مقعدی ماخ هوشمند 2017 ، 40 ، 834-848. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- چن، L.-C.; پاپاندرو، جی. شروف، اف. Adam, H. Rethinking Convolution Atrous for Semantic Image Segmentation. arXiv 2017 , arXiv:1706.05587. [ Google Scholar ]
- Tsai، Y.-H. هونگ، دبلیو.-سی. شولتر، اس. سون، ک. یانگ، M.-H. چاندراکر، ام. یادگیری تطبیق فضای خروجی ساختاریافته برای تقسیم بندی معنایی. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 23 ژوئن 2018؛ IEEE Computer Society: Silver Spring, MD, USA, 2018; صص 7472-7481. [ Google Scholar ]
- پودل، RP; لیویکی، اس. Cipolla, R. Fast-SCNN: Fast Semantic Segmentation Network. arXiv 2019 ، arXiv:1902.04502. [ Google Scholar ]
- چوی، اس. کیم، جی تی؛ چو، جی. ماشینها نمیتوانند در آسمان پرواز کنند: بهبود بخشبندی صحنه شهری از طریق شبکههای توجه ارتفاع محور. در مجموعه مقالات کنفرانس IEEE/CVF در مورد بینایی کامپیوتری و تشخیص الگو، سیاتل، WA، ایالات متحده آمریکا، 13 تا 19 ژوئن 2020؛ انجمن کامپیوتر IEEE: Silver Spring، MD، ایالات متحده آمریکا، 2020؛ ص 9373–9383. [ Google Scholar ]
- چنگ، بی. کالینز، MD؛ زو، ی. لیو، تی. هوانگ، تی اس؛ آدم، اچ. چن، ال.-سی. Panoptic-Deeplab: یک پایه ساده، قوی و سریع برای تقسیم بندی پانوپتیک از پایین به بالا. در مجموعه مقالات کنفرانس IEEE/CVF در مورد بینایی کامپیوتری و تشخیص الگو، سیاتل، WA، ایالات متحده آمریکا، 13 تا 19 ژوئن 2020؛ انجمن کامپیوتر IEEE: Silver Spring، MD، ایالات متحده آمریکا، 2020؛ ص 12475–12485. [ Google Scholar ]
- زی، ای. وانگ، دبلیو. یو، ز. آناندکومار، ا. آلوارز، جی.ام. Luo, P. SegFormer: طراحی ساده و کارآمد برای تقسیم بندی معنایی با ترانسفورماتورها. Adv. عصبی Inf. روند. سیستم 2021 ، 34 ، 12077-12090. [ Google Scholar ]
- یان، اچ. ژانگ، سی. وو، ام. لاوین ترانسفورماتور: بهبود ترانسفورماتور تقسیم بندی معنایی با بازنمایی های چند مقیاسی از طریق پنجره بزرگ توجه. arXiv 2022 ، arXiv:2201.01615. [ Google Scholar ]
- Zarco-Tejada، PJ; گونزالس-دوگو، ام وی. Fereres، E. پایداری فصلی فلورسانس کلروفیل کمیتسازی شده از تصاویر ابرطیفی هوا بهعنوان شاخصی از فتوسنتز خالص در زمینه کشاورزی دقیق. سنسور از راه دور محیط. 2016 ، 179 ، 89-103. [ Google Scholar ] [ CrossRef ]
- کامپف مایر، ام. سالبرگ، A.-B. جنسن، R. تقسیم بندی معنایی اشیاء کوچک و مدل سازی عدم قطعیت در تصاویر سنجش از دور شهری با استفاده از شبکه های عصبی پیچیده عمیق. در مجموعه مقالات کنفرانس IEEE در کارگاه های آموزشی بینایی کامپیوتری و تشخیص الگو، لاس وگاس، NV، ایالات متحده، 27-30 ژوئن 2016. IEEE Computer Society: Silver Spring, MD, USA, 2016; صفحات 1-9. [ Google Scholar ]
- فیتوکا، ای. تومپولیدو، م. هاتزیوردانو، ال. آپوستولاکیس، ا. هوفر، آر. ویز، ک. Ververis، C. نقشه برداری و ارزیابی اکوسیستم های مرتبط با آب بر اساس تکنیک های سنجش از دور و تجزیه و تحلیل مکانی: مورد خدمات ملی SWOS سایت های یونانی رامسر و حوضه های آبریز آنها. سنسور از راه دور محیط. 2020 , 245 , 111795. [ Google Scholar ] [ CrossRef ]
- مهاجرانی، س. سعیدی، P. Cloud و Cloud Shadow Segmentation for Remote Sensing Images by Filtered Jaccard Loss Function and Parametric Augmentation. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2021 , 14 , 4254–4266. [ Google Scholar ] [ CrossRef ]
- گریلو، آ. کریلوف، ویرجینیا؛ موزر، جی. Serpico، استخراج جاده SB و تخمین عرض جاده از طریق تلفیق تصاویر نوری هوایی، دادههای مکانی، و تصاویر سطح خیابان. در مجموعه مقالات سمپوزیوم بین المللی علوم زمین و سنجش از دور IEEE 2021 IGARSS، بروکسل، بلژیک، 11 تا 16 ژوئیه 2021؛ IEEE: Silver Spring، MD، USA، 2021؛ ص 2413-2416. [ Google Scholar ]
- دوشی، ج. گارسیا، دی. ماسی، سی. لوئکا، پی. بورنشتاین، ن. بیرد، م. کوک، ام. Raj, D. FireNet: بخش بندی بیدرنگ محیط آتش از ویدیوی هوایی. arXiv 2019 ، arXiv:1910.06407. [ Google Scholar ]
- خوشبورش ماسوله، م. شاه حسینی، ر. یک روش یادگیری عمیق برای تقسیم بندی ابر و سایه ابری در زمان نزدیک از تصاویر Gaofen-1. محاسبه کنید. هوشمند نوروسک. 2020 ، 2020 ، 8811630. [ Google Scholar ] [ CrossRef ]
- اسکو، ال پی. نوگیرا، ک. مارکس راموس، AP; فایتا پینیرو، ام. فورویا، DEG; Gonçalves، WN; د کاسترو خورخه، لس آنجلس; مارکاتو جونیور، جی. دوس سانتوس، JA تقسیم بندی معنایی باغ مرکبات با استفاده از شبکه های عصبی عمیق و تصاویر مبتنی بر پهپاد چندطیفی. دقیق کشاورزی 2021 ، 22 ، 1171-1188. [ Google Scholar ] [ CrossRef ]
- پان، بی. شی، ز. خو، X. شی، تی. ژانگ، ن. Zhu، X. CoinNet: شبکه راهاندازی کپی برای تقسیمبندی معنایی تصاویر چندطیفی. IEEE Geosci. سنسور از راه دور Lett. 2018 ، 16 ، 816-820. [ Google Scholar ] [ CrossRef ]
- سارالی اوغلو، ای. Gungor، O. بخش بندی معنایی پوشش زمین از تصاویر ماهواره ای چندطیفی با وضوح بالا توسط شبکه عصبی کانولوشنال طیفی-فضایی. Geocarto Int. 2022 ، 37 ، 657-677. [ Google Scholar ] [ CrossRef ]
- هاماگوچی، آر. فوجیتا، ا. نموتو، ک. ایمایزومی، تی. Hikosaka، S. استفاده موثر از پیچش های گشاد شده برای قطعه بندی نمونه های اشیاء کوچک در تصاویر سنجش از دور. در مجموعه مقالات کنفرانس زمستانی IEEE 2018 در مورد کاربردهای بینایی کامپیوتری (WACV)، دریاچه تاهو، NV، ایالات متحده، 12 تا 15 مارس 2018؛ IEEE Computer Society: Silver Spring, MD, USA, 2018; ص 1442-1450. [ Google Scholar ]
- دونگ، آر. پان، X. Li, F. تقسیم بندی معنایی اشیاء کوچک مبتنی بر شبکه متراکم در تصاویر سنجش از دور شهری. دسترسی IEEE 2019 ، 7 ، 65347–65356. [ Google Scholar ] [ CrossRef ]
- تاکیکاوا، تی. آکونا، دی. جامپانی، وی. Fidler, S. Gated-SCNN: CNNs شکل دروازه ای برای تقسیم بندی معنایی. در مجموعه مقالات کنفرانس بین المللی IEEE/CVF در بینایی کامپیوتر، سئول، کره، 27 اکتبر تا 2 نوامبر 2019؛ IEEE Computer Society: Silver Spring، MD، ایالات متحده آمریکا، 2019؛ صص 5229–5238. [ Google Scholar ]
- لی، اچ. کیو، ک. چن، ال. می، ایکس. هونگ، ال. Tao, C. SCAttNet: شبکه تقسیم بندی معنایی با مکانیزم توجه فضایی و کانالی برای تصاویر سنجش از دور با وضوح بالا. IEEE Geosci. سنسور از راه دور Lett. 2020 ، 18 ، 905–909. [ Google Scholar ] [ CrossRef ]
- فن، اچ. کنگ، جی. Zhang, C. یک پلتفرم تعاملی برای مدلسازی ساختمان سه بعدی کم هزینه از داده های VGI با استفاده از شبکه عصبی کانولوشن. داده های بزرگ زمین 2021 ، 5 ، 49-65. [ Google Scholar ] [ CrossRef ]
- کوکس، اچ. پینهو، سی. سوزا، I. تصاویر ماهواره ای با وضوح بالا برای برنامه ریزی شهری. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2006 ، 36 ، 121-124. [ Google Scholar ]
- Leu، L.-G. چانگ، H.-W. سنجش از دور در تشخیص اعماق آب و بار بستر آبهای کم عمق و تغییرات آنها. اقیانوس. مهندس 2005 ، 32 ، 1174-1198. [ Google Scholar ] [ CrossRef ]
- ساکسنا، ا. چانگ، اس. Ng, A. عمق یادگیری از تصاویر تک چشمی منفرد. Adv. عصبی Inf. روند. سیستم 2005 ، 18 . در دسترس آنلاین: https://proceedings.neurips.cc/paper/2005/hash/17d8da815fa21c57af9829fb0a869602-Abstract.html (در 1 مارس 2022 قابل دسترسی است).
- لیو، بی. گولد، اس. Koller, D. تخمین عمق تصویر تکی از برچسب های معنایی پیش بینی شده. در مجموعه مقالات کنفرانس IEEE Computer Society در سال 2010 در مورد دید رایانه و تشخیص الگو، سانفرانسیسکو، کالیفرنیا، ایالات متحده آمریکا، 13 تا 18 ژوئن 2010. IEEE Computer Society: Silver Spring, MD, USA, 2010; ص 1253-1260. [ Google Scholar ]
- لدیکی، ال. شی، ج. پولفیز، ام. بیرون کشیدن چیزها از چشم انداز. در مجموعه مقالات کنفرانس IEEE در مورد دید کامپیوتری و تشخیص الگو، کلمبوس، OH، ایالات متحده آمریکا، 23 تا 28 ژوئن 2014. IEEE Computer Society: Silver Spring, MD, USA, 2014; صص 89-96. [ Google Scholar ]
- کلینگنر، ام. ترموهلن، J.-A. میکولایچیک، جی. Fingscheidt, T. Self-Supervised Monocular Depth Estimation: Solving the Dynamic Object by Semantic Guidance . Springer: برلین/هایدلبرگ، آلمان، 2020؛ صص 582-600. [ Google Scholar ]
- لی، آر. او، X. ژو، دی. سو، اس. مائو، کیو. زو، ی. سان، ج. ژانگ، ی. عمق یادگیری از طریق اهرم معناشناسی: تخمین عمق تک چشمی خود نظارتی با راهنمایی معنایی ضمنی و صریح. arXiv 2021 ، arXiv:2102.06685. [ Google Scholar ]
- یونگ، اچ. پارک، ای. Yoo, S. افزایش بازنمایی با آگاهی از معنای ریز برای تخمین عمق تک چشمی خود نظارتی. در مجموعه مقالات کنفرانس بین المللی IEEE/CVF در بینایی کامپیوتر، مونترال، QC، کانادا، 10 تا 17 اکتبر 2021؛ انجمن کامپیوتر IEEE: Silver Spring, MD, USA, 2021; صص 12642–12652. [ Google Scholar ]
- مو، ال. Zhu, XX IM2HEIGHT: تخمین ارتفاع از تصاویر تک چشمی تک چشمی از طریق شبکه کاملاً باقیمانده کانولوشنال-دکانولوشن. arXiv 2018 ، arXiv:1802.10249. [ Google Scholar ]
- امینی امیرکلایی، ح. عارفی، اچ. برآورد مدلهای ارتفاع قبل و بعد از زلزله بر اساس سیانان از تصاویر تک نوری برای شناسایی ساختمانهای فروریخته. سنسور از راه دور Lett. 2019 ، 10 ، 679-688. [ Google Scholar ] [ CrossRef ]
- امیرکلایی، ح. عارفی، ح. برآورد ارتفاع از تصاویر هوایی منفرد با استفاده از شبکه رمزگذار-رمزگشای عمیق کانولوشن. ISPRS J. Photogramm. Remote Sens. 2019 ، 149 ، 50–66. [ Google Scholar ] [ CrossRef ]
- نیش، ز. چن، ایکس. چن، ی. Gool، LV به سمت تمرین خوب برای تخمین عمق تک چشمی مبتنی بر CNN. در مجموعه مقالات کنفرانس زمستانی IEEE/CVF در مورد کاربردهای بینایی رایانه، Snowmass Village، CO، ایالات متحده آمریکا، 1 تا 5 مارس 2020؛ انجمن کامپیوتر IEEE: Silver Spring، MD، ایالات متحده آمریکا، 2020؛ صص 1091–1100. [ Google Scholar ]
- ایگن، دی. پورش، سی. Fergus, R. پیش بینی نقشه عمق از یک تصویر واحد با استفاده از یک شبکه عمیق چند مقیاسی. Adv. عصبی Inf. روند. سیستم 2014 ، 27 ، 2366-2374. [ Google Scholar ]
- ایگن، دی. فرگوس، آر. پیشبینی عمق، نرمالهای سطحی و برچسبهای معنایی با یک معماری کانولوشنال چند مقیاسی رایج. در مجموعه مقالات کنفرانس بین المللی IEEE در بینایی کامپیوتر، سانتیاگو، شیلی، 7 تا 13 دسامبر 2015. IEEE Computer Society: Silver Spring, MD, USA, 2015; صص 2650–2658. [ Google Scholar ]
- تامپسون، جی ال. Phung، SL; Bouzerdoum, A. D-Net: یک شبکه عمیق تعمیم یافته و بهینه شده برای تخمین عمق تک چشمی. دسترسی IEEE 2021 ، 9 ، 134543–134555. [ Google Scholar ] [ CrossRef ]
- چارشتاین، دی. Szeliski, R. A Taxonomy and Evaluation of Dense Two-Frame Stereo Correspondence Algorithms. بین المللی جی. کامپیوتر. Vis. 2002 ، 47 ، 7-42. [ Google Scholar ] [ CrossRef ]
- Sinz، FH; Candela، JQ; باکیر، غ. راسموسن، CE; فرانتس، MO عمق یادگیری از استریو . Springer: برلین/هایدلبرگ، آلمان، 2004; صص 245-252. [ Google Scholar ]
- میمیشویچ، آر. کنراد، سی. استریوپسیس از طریق یادگیری عمیق. در مجموعه مقالات کارگاه آموزشی NIPS در مورد یادگیری عمیق، گرانادا، اسپانیا، 16 دسامبر 2011. Curran Associates Inc.: Red Hook، NY، USA، 2011; جلد 1، ص. 2. [ Google Scholar ]
- کوندا، ک. Memisevic، R. یادگیری بدون نظارت عمق و حرکت. arXiv 2013 ، arXiv:1312.3429. [ Google Scholar ]
- سریواستاوا، اس. ولپی، م. Tuia، D. تخمین ارتفاع مشترک و برچسب گذاری معنایی تصاویر هوایی تک چشمی با CNN. در مجموعه مقالات سمپوزیوم بین المللی زمین شناسی و سنجش از دور IEEE 2017 (IGARSS)، فورت ورث، تگزاس، ایالات متحده آمریکا، 23 تا 28 ژوئیه 2017؛ IEEE Computer Society: Silver Spring, MD, USA, 2017; صص 5173–5176. [ Google Scholar ]
- یانگ، دبلیو. لی، ایکس. یانگ، بی. Fu، Y. الگوریتم تطبیق استریو جدید برای تولید مدل سطح دیجیتال (DSM) در مناطق آبی. Remote Sens. 2020 , 12 , 870. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گرین اسپن، اچ. وضوح فوق العاده در تصویربرداری پزشکی. محاسبه کنید. J. 2009 ، 52 ، 43-63. [ Google Scholar ] [ CrossRef ]
- چن، ی. شی، اف. کریستودولو، AG; زی، ی. ژو، ز. لی، دی. رزولوشن فوق العاده کارآمد و دقیق MRI با استفاده از یک شبکه متخاصم مولد و شبکه سه بعدی چند سطحی با اتصال متراکم . Springer: برلین/هایدلبرگ، آلمان، 2018; ص 91-99. [ Google Scholar ]
- میلانفر، ص. تصویربرداری با وضوح فوق العاده ; CRC Press: بوکا راتون، فلوریدا، ایالات متحده آمریکا، 2017؛ شابک 1-4398-1931-9. [ Google Scholar ]
- دای، دی. وانگ، ی. چن، ی. Van Gool, L. آیا وضوح تصویر فوق العاده برای سایر وظایف بینایی مفید است؟ در مجموعه مقالات کنفرانس زمستانی IEEE 2016 در مورد کاربردهای بینایی کامپیوتری (WACV)، لیک پلاسید، نیویورک، ایالات متحده آمریکا، 7 تا 10 مارس 2016؛ IEEE Computer Society: Silver Spring, MD, USA, 2016; صفحات 1-9. [ Google Scholar ]
- حارث، م. شاخناروویچ، جی. Ukita, N. Resolution Super Task-Driven: تشخیص اشیا در تصاویر با وضوح پایین . Springer: برلین/هایدلبرگ، آلمان، 2021؛ صص 387-395. [ Google Scholar ]
- اور، اچ. Gross, D. وضوح بهبود یافته از تصاویر تغییر یافته Subpixel. نمودار CVGIP. فرآیند تصویر مدل ها 1992 ، 54 ، 181-186. [ Google Scholar ] [ CrossRef ]
- پاپولیس، A. گسترش نمونه گیری تعمیم یافته. IEEE Trans. سیستم مدار. 1977 ، 24 ، 652-654. [ Google Scholar ] [ CrossRef ]
- ایرانی، م. Peleg, S. بهبود وضوح با ثبت تصویر. نمودار CVGIP. فرآیند تصویر مدل ها 1991 ، 53 ، 231-239. [ Google Scholar ] [ CrossRef ]
- لی، اف. فریزر، دی. Jia, X. بهبود یافته IBP برای تصاویر سنجش از راه دور با وضوح فوق العاده. Geogr. Inf. علمی 2006 ، 12 ، 106-111. [ Google Scholar ] [ CrossRef ]
- آگوئنا، ام ال. Mascarenhas، ترکیب داده های تصویر چندطیفی ND با استفاده از POCS و وضوح فوق العاده. محاسبه کنید. Vis. تصویر زیر. 2006 ، 102 ، 178-187. [ Google Scholar ] [ CrossRef ]
- استارک، اچ. اسکویی، ص. بازیابی تصویر با وضوح بالا از آرایه های صفحه تصویر، با استفاده از پیش بینی های محدب. JOSA A 1989 ، 6 ، 1715-1726. [ Google Scholar ] [ CrossRef ]
- کیم، کی. Kwon, Y. وضوح فوق العاده تک تصویری با استفاده از رگرسیون پراکنده و تصویر طبیعی قبلی. IEEE Trans. الگوی مقعدی ماخ هوشمند 2010 ، 32 ، 1127-1133. [ Google Scholar ]
- یانگ، جی. رایت، جی. هوانگ، تی اس؛ Ma, Y. وضوح تصویر فوق العاده از طریق نمایش پراکنده. IEEE Trans. فرآیند تصویر 2010 ، 19 ، 2861-2873. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- تام، BC; Katsaggelos، AK بازسازی یک تصویر با وضوح بالا از تصاویر چندگانه تخریب شده و ثبت نادرست با وضوح پایین . SPIE: Bellingham, WA, USA, 1994; جلد 2308، ص 971–981. [ Google Scholar ]
- شولتز، RR; استیونسون، RL استخراج فریم های با وضوح بالا از توالی های ویدیویی. IEEE Trans. فرآیند تصویر 1996 ، 5 ، 996-1011. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- الاد، م. Feuer, A. Restoration Super Resolution of a Image Sequence: Adaptive Filtering Approach. IEEE Trans. فرآیند تصویر 1999 ، 8 ، 387-395. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- یوان، Q. یان، ال. لی، جی. Zhang، L. وضوح فوق العاده تصویر سنجش از دور از طریق مدل تغییرات کلی تطبیقی منطقه ای. در مجموعه مقالات سمپوزیوم IEEE Geoscience and Remote Sensing 2014، شهر کبک، QC، کانادا، 13 تا 18 ژوئیه 2014. IEEE Computer Society: Silver Spring, MD, USA, 2014; صص 3073–3076. [ Google Scholar ]
- ری، اس. الگوریتم بازسازی تصویر با وضوح بالا بر اساس تبدیل کسینوس گسسته کانگ، MG. انتخاب کنید مهندس 1999 ، 38 ، 1348-1356. [ Google Scholar ] [ CrossRef ]
- چان، RH; چان، TF; شن، ال. شن، Z. الگوریتم موجک برای بازسازی تصویر با وضوح بالا. SIAM J. Sci. محاسبه کنید. 2003 ، 24 ، 1408-1432. [ Google Scholar ] [ CrossRef ]
- نیلمانی، ر. چوی، اچ. Baraniuk، R. ForWaRD: Fourier-Wavelet Regularized Deconvolution for Ill-Conditioned Systems. IEEE Trans. فرآیند سیگنال 2004 ، 52 ، 418-433. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دونگ، سی. لوی، سی سی; او، ک. تانگ، ایکس. یادگیری یک شبکه کانولوشن عمیق برای وضوح تصویر فوق العاده . Springer: برلین/هایدلبرگ، آلمان، 2014; ص 184-199. [ Google Scholar ]
- دونگ، سی. لوی، سی سی; تانگ، ایکس. شتاب دادن به شبکه عصبی کانولوشنال با وضوح فوق العاده . Springer: برلین/هایدلبرگ، آلمان، 2016; صص 391-407. [ Google Scholar ]
- لدیگ، سی. تیس، ال. Huszár، F. کابالرو، جی. کانینگهام، ای. آکوستا، آ. آیتکن، آ. تجانی، ع. توتز، جی. Wang, Z. عکس واقعی تصویر تک تصویر با وضوح فوق العاده با استفاده از یک شبکه دشمن مولد. در مجموعه مقالات کنفرانس IEEE در مورد دید رایانه و تشخیص الگو، هونولولو، HI، ایالات متحده آمریکا، 21 تا 26 ژوئیه 2017؛ IEEE Computer Society: Silver Spring, MD, USA, 2017; صص 4681-4690. [ Google Scholar ]
- کیم، جی. لی، جی کی; لی، وضوح تصویر فوق العاده دقیق KM با استفاده از شبکه های کانولوشن بسیار عمیق. در مجموعه مقالات کنفرانس IEEE در مورد دید کامپیوتری و تشخیص الگو، لاس وگاس، NV، ایالات متحده، 27-30 ژوئن 2016. IEEE Computer Society: Silver Spring, MD, USA, 2016; صفحات 1646-1654. [ Google Scholar ]
- لای، دبلیو-اس. هوانگ، J.-B. آهوجا، ن. یانگ، ام.-اچ. شبکه های هرمی لاپلاسی عمیق برای وضوح فوق العاده سریع و دقیق. در مجموعه مقالات کنفرانس IEEE در مورد دید رایانه و تشخیص الگو، هونولولو، HI، ایالات متحده آمریکا، 21 تا 26 ژوئیه 2017؛ IEEE Computer Society: Silver Spring, MD, USA, 2017; صص 624-632. [ Google Scholar ]
- لیم، بی. پسران.؛ کیم، اچ. نه، س. Mu Lee, K. شبکه های عمیق باقیمانده پیشرفته برای وضوح تصویر تکی. در مجموعه مقالات کنفرانس IEEE در کارگاه های آموزشی بینایی رایانه و تشخیص الگو، هونولولو، HI، ایالات متحده آمریکا، 21 تا 26 ژوئیه 2017؛ IEEE Computer Society: Silver Spring, MD, USA, 2017; صص 136-144. [ Google Scholar ]
- مائو، X.-J. شن، سی. یانگ، ی.-بی. بازیابی تصویر با استفاده از رمزگذارهای خودکار کانولوشن با اتصالات پرش متقارن. arXiv 2016 , arXiv:1606.08921. [ Google Scholar ]
- چن، اچ. او، X. چینگ، ال. وو، ی. رن، سی. کلانتر، RE; زو، سی. وضوح تصویر تکی در دنیای واقعی: مروری کوتاه. Inf. فیوژن 2022 ، 79 ، 124-145. [ Google Scholar ] [ CrossRef ]
- فو، ی. ژانگ، تی. ژنگ، ی. ژانگ، دی. Huang, H. وضوح تصویر فراطیفی با هدایت RGB بهینه. در مجموعه مقالات کنفرانس IEEE/CVF در مورد دید کامپیوتری و تشخیص الگو، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 15 تا 20 ژوئن 2019؛ IEEE Computer Society: Silver Spring، MD، ایالات متحده آمریکا، 2019؛ صص 11661–11670. [ Google Scholar ]
- هان، X.-H. شی، بی. ژنگ، ی. SSF-CNN: همجوشی فضایی و طیفی با CNN برای وضوح تصویر فوق طیفی. در مجموعه مقالات بیست و پنجمین کنفرانس بین المللی IEEE در مورد پردازش تصویر (ICIP)، آتن، یونان، 7 تا 10 اکتبر 2018؛ IEEE Computer Society: Silver Spring, MD, USA, 2018; ص 2506-2510. [ Google Scholar ]
- جیانگ، جی. سان، اچ. لیو، ایکس. Ma، J. یادگیری فضایی-طبیعی قبل برای وضوح فوق العاده تصاویر فراطیفی. IEEE Trans. محاسبه کنید. تصویربرداری 2020 ، 6 ، 1082–1096. [ Google Scholar ] [ CrossRef ]
- Qu، Y. چی، اچ. کوان، سی. شبکه دیریکله پراکنده بدون نظارت برای وضوح تصویر فوق طیفی. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 23 ژوئن 2018؛ IEEE Computer Society: Silver Spring, MD, USA, 2018; صص 2511-2520. [ Google Scholar ]
- دونگ، دبلیو. ژو، سی. وو، اف. وو، جی. شی، جی. لی، ایکس. رزولوشن فوق العاده تصویر فراطیفی عمیق با هدایت مدل. IEEE Trans. فرآیند تصویر 2021 ، 30 ، 5754-5768. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Demiray، BZ; بنشین، م. Demir, I. DEM Super-Resolution با EfficientNetV2. arXiv 2021 ، arXiv:2109.09661. [ Google Scholar ]
- کین، ام. هو، ال. دو، ز. گائو، ی. کین، ال. ژانگ، اف. لیو، آر. دستیابی به منطقه دریاچه با وضوح بالاتر از تصاویر سنجش از دور از طریق روش یادگیری عمیق بدون نظارت. Remote Sens. 2020 ، 12 ، 1937. [ Google Scholar ] [ CrossRef ]
- بی، اف. لی، م. وانگ، ی. هوانگ، دی. ردیابی هدف سنجش از راه دور در ویدیوی هوایی پهپاد بر اساس MDnet ارتقا یافته برجسته. دسترسی IEEE 2019 ، 7 ، 76731–76740. [ Google Scholar ] [ CrossRef ]
- اوزکنت، بی. رنگ نکار، ا. هافمن، ام. ردیابی وسایل نقلیه هوایی با ترکیب تطبیقی نقشههای احتمال فراطیفی. در مجموعه مقالات کنفرانس IEEE در کارگاه های آموزشی بینایی رایانه و تشخیص الگو، هونولولو، HI، ایالات متحده آمریکا، 21 تا 26 ژوئیه 2017؛ IEEE Computer Society: Silver Spring, MD, USA, 2017; صص 39-48. [ Google Scholar ]
- هو، دبلیو. تان، تی. وانگ، ال. میبانک، اس. نظرسنجی در مورد نظارت بصری حرکت و رفتار اشیاء. IEEE Trans. سیستم مرد سایبرن. قسمت C Appl. Rev. 2004 , 34 , 334-352. [ Google Scholar ] [ CrossRef ]
- جاوید، او. شاه، ام. ردیابی و طبقه بندی اشیاء برای نظارت خودکار . Springer: برلین/هایدلبرگ، آلمان، 2002; صص 343-357. [ Google Scholar ]
- کورتنی، JD نمایه سازی خودکار ویدیو از طریق تجزیه و تحلیل حرکت شی. تشخیص الگو 1997 ، 30 ، 607-625. [ Google Scholar ] [ CrossRef ]
- لی، اس.-ای. کائو، اچ.-م. نمایه سازی ویدیو: رویکردی مبتنی بر حرکت شی و مسیر. در ذخیره سازی و بازیابی برای پایگاه های داده تصویر و ویدئو . SPIE: Bellingham, WA, USA, 1993; جلد 1908، صص 25-36. [ Google Scholar ]
- جیکوب، RJ; کارن، KS Eye Tracking در تحقیقات تعامل انسان و کامپیوتر و قابلیت استفاده: آماده ارائه وعدهها. در چشم ذهن ؛ الزویر: آمستردام، هلند، 2003; صص 573-605. [ Google Scholar ]
- ژانگ، ایکس. لیو، ایکس. یوان، اس.-م. لین، اس.-ف. سیستم کنترل مبتنی بر ردیابی چشم برای تعامل طبیعی انسان و رایانه. محاسبه کنید. هوشمند نوروسک. 2017 , 2017 , 5739301. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یلماز، ع. جاوید، او. شاه، ام. ردیابی شی: بررسی. کامپیوتر ACM. Surv. CSUR 2006 ، 38 ، 13-es. [ Google Scholar ] [ CrossRef ]
- منگ، ال. Kerekes، JP Object Tracking با استفاده از تصاویر ماهواره ای با وضوح بالا. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2012 ، 5 ، 146-152. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پاپاژورگیو، CP; اورن، ام. Poggio، T. چارچوب کلی برای تشخیص اشیا. در مجموعه مقالات ششمین کنفرانس بین المللی بینایی کامپیوتر (IEEE Cat. No.98CH36271)، بمبئی، هند، 7 ژانویه 1998; انجمن کامپیوتر IEEE: واشنگتن، دی سی، ایالات متحده آمریکا، 1998; صص 555-562. [ Google Scholar ]
- گرین اسپن، اچ. بلنگی، اس. گودمن، آر. پرونا، پی. راکشیت، اس. Anderson, CH فیلترهای هرمی قابل هدایت بیش از حد کامل و تغییر ناپذیری چرخش . IEEE Computer Society: Silver Spring, MD, USA, 1994. [ Google Scholar ]
- Paschos, G. فضاهای رنگی یکنواخت ادراکی برای تجزیه و تحلیل بافت رنگ: یک ارزیابی تجربی. IEEE Trans. فرآیند تصویر 2001 ، 10 ، 932-937. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کومانیسیو، دی. رامش، وی. Meer, P. ردیابی اشیاء مبتنی بر هسته. IEEE Trans. الگوی مقعدی ماخ هوشمند 2003 ، 25 ، 564-577. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ساتو، ک. Aggarwal، JK Temporal Spatio-Velocity Transform و کاربرد آن در ردیابی و تعامل. محاسبه کنید. Vis. تصویر زیر. 2004 ، 96 ، 100-128. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وینمن، سی جی; ریندرز، ام جی. Backer, E. Resolving Motion Correspondence for Densely Moving Points. IEEE Trans. الگوی مقعدی ماخ هوشمند 2001 ، 23 ، 54-72. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- دو، بی. کای، اس. Wu, C. ردیابی اشیا در ویدیوهای ماهواره ای بر اساس یک ردیاب جریان نوری چند فریمی. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2019 , 12 , 3043–3055. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هینز، اس. باملر، آر. Stilla, U. موضوع سرمقاله: نظارت بر ترافیک هوایی و فضایی. ISPRS J. Photogramm. Remote Sens. 2006 , 61 , 135-136. [ Google Scholar ] [ CrossRef ]
- شائو، جی. دو، بی. وو، سی. Zhang, L. ردیابی اشیاء از ویدئوهای ماهواره ای: فیلتر همبستگی مبتنی بر ویژگی سرعت. IEEE Trans. Geosci. Remote Sens. 2019 , 57 , 7860–7871. [ Google Scholar ] [ CrossRef ]
- لوکاس، بی.دی. Kanade, T. یک تکنیک تکراری ثبت تصویر با کاربرد در دید استریو . Morgan Kaufmann Publishers: San Francisco, CA, USA, 1981; صص 674-679. [ Google Scholar ]
- مائو، ایکس. لی، کیو. زی، اچ. لاو، RY؛ وانگ، ز. پل اسمولی، S. حداقل مربعات شبکه های متخاصم مولد. در مجموعه مقالات کنفرانس بین المللی IEEE در بینایی کامپیوتر، ونیز، ایتالیا، 22 تا 29 اکتبر 2017؛ IEEE Computer Society: Silver Spring, MD, USA, 2017; صص 2794-2802. [ Google Scholar ]
- ژوان، اس. لی، اس. ژائو، ز. ژو، ز. ژانگ، دبلیو. تان، اچ. شیا، جی. Gu, Y. فیلتر همبستگی تطبیقی چرخشی برای ردیابی شی متحرک در ویدیوهای ماهواره ای. محاسبات عصبی 2021 ، 438 ، 94-106 . [ Google Scholar ] [ CrossRef ]
- بروزون، ال. Bovolo, F. چارچوبی جدید برای طراحی سیستمهای تشخیص تغییر برای تصاویر سنجش از دور با وضوح بسیار بالا. Proc. IEEE 2012 ، 101 ، 609-630. [ Google Scholar ] [ CrossRef ]
- کائو، جی. ژو، ال. Li, Y. یک روش جدید تشخیص تغییر در تصاویر سنجش از دور با وضوح بالا بر اساس یک مدل میدان تصادفی شرطی. بین المللی J. Remote Sens. 2016 , 37 , 1173-1189. [ Google Scholar ] [ CrossRef ]
- Fytsilis، AL; پروکوس، ا. کوترومباس، ک.د. مایکل، دی. Kontoes، CC روشی برای تشخیص تغییرات تقریباً واقعی بین وسایل نقلیه هوایی بدون سرنشین و تصاویر ماهواره ای منطقه وسیع. ISPRS J. Photogramm. Remote Sens. 2016 , 119 , 165–186. [ Google Scholar ] [ CrossRef ]
- اجادی، OA; مایر، اف جی. تشخیص تغییر وبلی، PW در تصاویر رادار دیافراگم مصنوعی با استفاده از رویکرد چند مقیاس محور. Remote Sens. 2016 , 8 , 482. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کوی، بی. ما، ایکس. Xie، X. رن، جی. Ma, Y. طبقه بندی تصاویر فراطیفی مرئی و مادون قرمز بر اساس تقسیم بندی تصویر و فیلتر حفظ لبه. فیزیک مادون قرمز تکنولوژی 2017 ، 81 ، 79-88. [ Google Scholar ] [ CrossRef ]
- لیو، جی. گونگ، ام. Qin، K. Zhang، P. یک شبکه اتصال پیچیده عمیق برای تشخیص تغییر بر اساس تصاویر نوری و راداری ناهمگن. IEEE Trans. شبکه عصبی فرا گرفتن. سیستم 2016 ، 29 ، 545-559. [ Google Scholar ] [ CrossRef ]
- آسوکان، ع. Anitha, J. تکنیکهای تشخیص تغییر برای کاربردهای سنجش از راه دور: یک بررسی. علوم زمین به اطلاع رساندن. 2019 ، 12 ، 143-160. [ Google Scholar ] [ CrossRef ]
- سینگ، الف. مقاله تکنیکهای تشخیص تغییر دیجیتال با استفاده از دادههای سنجش از راه دور را مرور کنید. بین المللی J. Remote Sens. 1989 ، 10 ، 989-1003. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- که، ال. لین، ی. زنگ، ز. ژانگ، ال. Meng, L. تشخیص تغییر تطبیقی با آزمون اهمیت. دسترسی IEEE 2018 ، 6 ، 27442–27450. [ Google Scholar ] [ CrossRef ]
- سینگ، الف. تشخیص تغییر در محیط جنگل های استوایی شمال شرقی هند با استفاده از Landsat. سنسور از راه دور. لند مناگ. 1986 ، 44 ، 237-254. [ Google Scholar ]
- وودول، جی. هابی، جی. هاتون، آر. ملیلو، جی. پترسون، بی. ریش تراش، جی. استون، تی. مور، بی. پارک، الف. جنگل زدایی اندازه گیری شده توسط Landsat: گام هایی به سوی یک روش . آزمایشگاه بیولوژیکی دریایی: Woods Hole، MA، ایالات متحده آمریکا. مرکز اکوسیستم: دورهام، NC، ایالات متحده; شرکت جنرال الکتریک: Lanham، MD، ایالات متحده، 1983. [ Google Scholar ]
- لیو، اس. بروزون، ال. بوولو، اف. زانتی، م. Du, P. تجزیه و تحلیل برداری تغییر طیفی متوالی برای کشف و تشخیص تکراری تغییرات چندگانه در تصاویر فراطیفی. IEEE Trans. Geosci. Remote Sens. 2015 , 53 , 4363–4378. [ Google Scholar ] [ CrossRef ]
- اینگرام، ک. کنپ، ای. رابینسون، جی. توسعه تکنیک تشخیص تغییر برای بهبود ترسیم مناطق شهری . CSC/TM-81/6087; NASA، Computer Sciences Corporation: Springfield، MD، USA، 1981. [ Google Scholar ]
- بیرن، جی. کراپر، پی. مایو، ک. نظارت بر تغییر پوشش زمین با تجزیه و تحلیل مؤلفه های اصلی داده های لندست چند زمانی. سنسور از راه دور محیط. 1980 ، 10 ، 175-184. [ Google Scholar ] [ CrossRef ]
- صادقی، و. فرنود احمدی، ف. عبادی، ح. طراحی و پیاده سازی سیستم خبره به روز رسانی نقشه های موضوعی با استفاده از تصاویر ماهواره ای (مطالعه موردی: تغییرات دریاچه ارومیه). عرب جی. ژئوشی. 2016 ، 9 ، 257. [ Google Scholar ] [ CrossRef ]
- فراریس، وی. دوبیجون، ن. وی، کیو. Chabert، M. تشخیص تغییرات بین تصاویر نوری با تفکیکپذیریهای مختلف فضایی و طیفی: یک رویکرد مبتنی بر همجوشی. IEEE Trans. Geosci. Remote Sens. 2017 ، 56 ، 1566–1578. [ Google Scholar ] [ CrossRef ]
- تحلیل برداری تغییر Malila، WA : رویکردی برای تشخیص تغییرات جنگل با Landsat . Purdue e-Pubs: West Lafayette, IN, USA, 1980; پ. 385. [ Google Scholar ]
- چن، تی. Trinder, JC; Niu، R. نقشه برداری زمین لغزش شی گرا با استفاده از تصاویر ماهواره ای ZY-3، جنگل تصادفی و مورفولوژی ریاضی، برای مخزن سه دره، چین. Remote Sens. 2017 , 9 , 333. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پاتیل، SD; گو، ی. دیاس، FSA؛ استیگلیتز، ام. ترک، جی. پیش بینی اطلاعات طیفی پوشش زمین آینده با استفاده از یادگیری ماشین. بین المللی J. Remote Sens. 2017 , 38 , 5592–5607. [ Google Scholar ] [ CrossRef ]
- سان، اچ. وانگ، کیو. وانگ، جی. لین، اچ. لو، پی. لی، جی. زنگ، اس. خو، X. Ren, L. بهینه سازی KNN برای نقشه برداری پوشش گیاهی مناطق خشک و نیمه خشک با استفاده از تصاویر Landsat. Remote Sens. 2018 , 10 , 1248. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- چن، اچ. چی، ز. Shi, Z. تشخیص تغییر تصویر سنجش از راه دور با ترانسفورماتور. IEEE Trans. Geosci. Remote Sens. 2021 , 60 , 21546965. [ Google Scholar ] [ CrossRef ]
- چن، اچ. Shi, Z. یک روش مبتنی بر توجه مکانی-زمانی و یک مجموعه داده جدید برای تشخیص تغییر تصویر سنجش از دور. Remote Sens. 2020 , 12 , 1662. [ Google Scholar ] [ CrossRef ]
- هو، بی. لیو، کیو. وانگ، اچ. Wang, Y. از W-Net تا CDGAN: تشخیص تغییر دوتایی از طریق تکنیکهای یادگیری عمیق. IEEE Trans. Geosci. Remote Sens. 2019 ، 58 ، 1790–1802. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پنگ، دی. ژانگ، ی. Guan، H. تشخیص تغییر سرتاسر برای تصاویر ماهوارهای با وضوح بالا با استفاده از UNet++ بهبودیافته. Remote Sens. 2019 , 11 , 1382. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سفرین، او. Riese, FM; کلر، اس. یادگیری عمیق برای تشخیص تغییر پوشش زمین. Remote Sens. 2021 , 13 , 78. [ Google Scholar ] [ CrossRef ]
- شی، س. لیو، ام. لی، اس. لیو، ایکس. وانگ، اف. Zhang، L. یک شبکه مبتنی بر متریک توجه تحت نظارت عمیق و یک مجموعه داده تصویر هوایی باز برای تشخیص تغییر سنجش از راه دور. IEEE Trans. Geosci. Remote Sens. 2021 , 60 , 21546965. [ Google Scholar ] [ CrossRef ]
- وانگ، کیو. ژانگ، ایکس. چن، جی. دای، اف. گونگ، ی. Zhu, K. تشخیص تغییر براساس R-CNN سریعتر برای تصاویر سنجش از راه دور با وضوح بالا. سنسور از راه دور Lett. 2018 ، 9 ، 923-932. [ Google Scholar ] [ CrossRef ]
- کاس، ام. ویتکین، ا. Terzopoulos، D. Snakes: Active Contour Models. بین المللی جی. کامپیوتر. Vis. 1988 ، 1 ، 321-331. [ Google Scholar ] [ CrossRef ]
- باکوروف، آی. بوزلی، م. اسکتینی، آر. کاستلی، م. ونشی، ال. شاخص تشابه ساختاری (SSIM) بازبینی شده: رویکرد داده محور. سیستم خبره Appl. 2022 ، 189 ، 116087. [ Google Scholar ] [ CrossRef ]
- آرمسترانگ، جی اس. کوزان، روش های شاخص AG برای پیش بینی: کاربرد در انتخابات ریاست جمهوری آمریکا. آینده نگری: بین. J. Appl. پیش بینی. 2006 ، 10-13. [ Google Scholar ]
- مک کی، سل؛ دوسکن، نیوجرسی؛ کلایست، جی. رابطه فراوانی و مدت خشکسالی با مقیاس های زمانی. در مجموعه مقالات هشتمین کنفرانس اقلیم شناسی کاربردی، آناهیم، کالیفرنیا، ایالات متحده آمریکا، 17 تا 22 ژانویه 1993. تحقیقات علمی: بوستون، MA، ایالات متحده آمریکا، 1993; جلد 17، ص 179–183. [ Google Scholar ]
- وانگ، پی. لی، ایکس. گونگ، جی. Song, C. شاخص وضعیت دمای پوشش گیاهی و کاربرد آن برای پایش خشکسالی. در IGARSS 2001: Scanning the Present and Resolving the Future، مجموعه مقالات سمپوزیوم بین المللی زمین شناسی و سنجش از دور IEEE 2001 (شماره گربه 01CH37217)، سیدنی، NSW، استرالیا، 9-13 جولای 2001 ؛ IEEE: واشنگتن، دی سی، ایالات متحده آمریکا، 2001; جلد 1، ص 141-143. [ Google Scholar ]
- وان، ز. وانگ، پی. Li، X. استفاده از محصولات MODIS سطح زمین و شاخص گیاهی تفاوت نرمال شده برای پایش خشکسالی در دشت های بزرگ جنوبی، ایالات متحده. بین المللی J. Remote Sens. 2004 ، 25 ، 61-72. [ Google Scholar ] [ CrossRef ]
- هان، پی. وانگ، پی ایکس؛ ژانگ، SY پیش بینی خشکسالی بر اساس داده های سنجش از دور با استفاده از مدل های ARIMA. ریاضی. محاسبه کنید. مدل. 2010 ، 51 ، 1398-1403. [ Google Scholar ] [ CrossRef ]
- کارنیلی، ا. آگام، ن. پینکر، RT; اندرسون، ام. ایمهوف، ام ال. گاتمن، جی جی. پانوف، ن. گلدبرگ، A. استفاده از NDVI و دمای سطح زمین برای ارزیابی خشکسالی: مزیت ها و محدودیت ها. جی. کلیم. 2010 ، 23 ، 618-633. [ Google Scholar ] [ CrossRef ]
- لیو، دبلیو. Juárez، RN ENSO پیشبینی شروع خشکسالی در شمال شرق برزیل با استفاده از NDVI. بین المللی J. Remote Sens. 2001 , 22 , 3483-3501. [ Google Scholar ] [ CrossRef ]
- پاتل، ن. پریدا، بی. زهره، V. سها، س. دادوال، وی. تجزیه و تحلیل خشکسالی کشاورزی با استفاده از شاخص وضعیت دمای گیاهی (VTCI) از داده های ماهواره Terra/MODIS. محیط زیست نظارت کنید. ارزیابی کنید. 2012 ، 184 ، 7153-7163. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- پیترز، ای جی. والتر شی، EA؛ جی، ال. وینا، ا. هیز، ام. Svoboda، MD پایش خشکسالی با شاخص استاندارد شده گیاهی مبتنی بر NDVI. فتوگرام مهندس Remote Sens. 2002 ، 68 ، 71-75. [ Google Scholar ]
- آگانا، NA; همای فر، الف. شبکه باور عمیق پیشبینیکننده مبتنی بر EMD برای پیشبینی سریهای زمانی: کاربرد برای پیشبینی خشکسالی. هیدرولوژی 2018 ، 5 ، 18. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- بای، ی. چن، ز. زی، جی. لی، سی. پیشبینی جریان ورودی مخزن روزانه با استفاده از یادگیری ویژگی عمیق چند مقیاسی با مدلهای ترکیبی. جی هیدرول. 2016 ، 532 ، 193-206. [ Google Scholar ] [ CrossRef ]
- چن، جی. جین، Q. Chao, J. طراحی شبکه های باور عمیق برای پیش بینی کوتاه مدت شاخص خشکسالی با استفاده از داده ها در حوضه رودخانه Huaihe. ریاضی. مشکل مهندس 2012 ، 2012 ، 235929. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- فرث، RJ یک شبکه عصبی پیچیده مکرر برای پیش بینی آب و هوا . LSU Digital Commons: Baton Rouge، LA، USA، 2016. [ Google Scholar ]
- لی، سی. بای، ی. Zeng, B. معماریهای یادگیری ویژگی عمیق برای پیشبینی جریان ورودی روزانه. منبع آب مدیریت 2016 ، 30 ، 5145-5161. [ Google Scholar ] [ CrossRef ]
- پورنیما، س. Pushpalatha، M. پیشبینی خشکسالی بر اساس SPI و SPEI با مقیاسهای زمانی متفاوت با استفاده از شبکه عصبی بازگشتی LSTM. محاسبات نرم. 2019 ، 23 ، 8399–8412. [ Google Scholar ] [ CrossRef ]
- وان، جی. لیو، جی. رن، جی. گوا، ی. یو، دی. هو، کیو. پیشبینی سرعت باد در روز آینده با یادگیری ویژگی عمیق. بین المللی ج. تشخیص الگو. آرتیف. هوشمند 2016 ، 30 ، 1650011. [ Google Scholar ] [ CrossRef ]
- لارا بنیتز، پی. کارانزا-گارسیا، ام. Riquelme, JC مروری تجربی بر معماریهای یادگیری عمیق برای پیشبینی سریهای زمانی. بین المللی J. سیستم عصبی. 2021 ، 31 ، 2130001. [ Google Scholar ] [ CrossRef ]
- هینتون، جنرال الکتریک؛ اوسیندرو، اس. Teh، Y.-W. الگوریتم یادگیری سریع برای شبکه های باور عمیق محاسبات عصبی 2006 ، 18 ، 1527-1554. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- هوکرایتر، اس. اشمیدهابر، جی. حافظه کوتاه مدت طولانی. محاسبات عصبی 1997 ، 9 ، 1735-1780. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- سلطانی، ک. امیری، ع. زین الدین، م. ابتهاج، اول. قره باغی، ب. بنکداری، ح. پیش بینی نوسانات ماهانه مناطق سطح دریاچه با استفاده از تکنیک های سنجش از دور و روش های جدید یادگیری ماشین. نظریه. Appl. کلیماتول. 2021 ، 143 ، 713-735. [ Google Scholar ] [ CrossRef ]
- الشربینی، او. ژو، ال. فنگ، ال. Qiu, Z. ادغام تصاویر مرئی و حرارتی با یک رویکرد شبکه عصبی مصنوعی برای پیشبینی قوی محتوای آب تاج در برنج. Remote Sens. 2021 , 13 , 1785. [ Google Scholar ] [ CrossRef ]
- گبرو، تی. کراوز، جی. وانگ، ی. چن، دی. دنگ، ج. آیدن، EL; Fei-Fei, L. استفاده از یادگیری عمیق و نمای خیابان Google برای تخمین ساختار جمعیتی محلهها در سراسر ایالات متحده. Proc. Natl. آکادمی علمی ایالات متحده آمریکا 2017 ، 114 ، 13108–13113. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کانگ، ی. ژانگ، اف. گائو، اس. لین، اچ. Liu, Y. مروری بر سنجش محیط فیزیکی شهری با استفاده از تصاویر نمای خیابان در مطالعات بهداشت عمومی. ان GIS 2020 ، 26 ، 261-275. [ Google Scholar ] [ CrossRef ]
- کیتا، ک. کیدزینسکی، Ł. تصویر نمای خیابان گوگل از یک خانه خطر تصادف اتومبیل ساکنان آن را پیش بینی می کند. arXiv 2019 ، arXiv:1904.05270. [ Google Scholar ]
- کو، BW; گوهاتاکورتا، اس. بوچوی، ن. عوامل همسایگی و راه رفتن در سطح خیابان چگونه با رفتارهای پیاده روی مرتبط هستند؟ یک رویکرد کلان داده با استفاده از تصاویر نمای خیابان. محیط زیست رفتار 2022 ، 54 ، 211-241. [ Google Scholar ] [ CrossRef ]
- کوماکوشی، ی. چان، سی. کویزومی، اچ. لی، ایکس. Yoshimura، Y. شاخص نمای سبز استاندارد شده و کمیت معیارهای مختلف پوشش گیاهی سبز شهری. پایداری 2020 ، 12 ، 7434. [ Google Scholar ] [ CrossRef ]
- قانون، اس. پیج، بی. راسل، سی. نگاهی به اطراف بیندازید: استفاده از نمای خیابان و تصاویر ماهواره ای برای تخمین قیمت خانه. ACM Trans. هوشمند سیستم تکنولوژی TIST 2019 ، 10 ، 54. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- ژانگ، اف. زو، جی. هو، م. زو، دی. کانگ، ی. گائو، اس. ژانگ، ی. Huang, Z. کشف مکانهای نامحسوس با استفاده از اعلام حضور در رسانههای اجتماعی و تصاویر نمای خیابان. محاسبه کنید. محیط زیست سیستم شهری 2020 ، 81 ، 101478. [ Google Scholar ] [ CrossRef ]
- Felzenszwalb، PF; Girshick، RB; مک آلستر، دی. رامانان، دی. تشخیص اشیاء با مدلهای مبتنی بر بخش آموزش دیده تبعیضآمیز. IEEE Trans. الگوی مقعدی ماخ هوشمند 2009 ، 32 ، 1627-1645. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- LeCun، Y.; بوتو، ال. بنژیو، ی. هافنر، P. یادگیری مبتنی بر گرادیان به کار گرفته شده در تشخیص سند. Proc. IEEE 1998 ، 86 ، 2278-2324. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Spedicato، GA; دوتانگ، سی. پترینی، ال. روشهای یادگیری ماشین برای انجام بهینهسازی قیمتگذاری. مقایسه با GLM های استاندارد Variance 2018 , 12 , 69-89. [ Google Scholar ]
- وبر، G.-W. چاووش اوغلو، ز. Özmen، A. پیشبینی احتمالات پیشفرض در بازارهای نوظهور توسط مدلهای خطی جزئی تعمیمیافته مخروطی جدید و بهینهسازی آنها. بهینه سازی 2012 ، 61 ، 443-457. [ Google Scholar ] [ CrossRef ]
- وانگ، آر. فنگ، ز. پیرس، جی. یائو، ی. لی، ایکس. لیو، ی. توزیع کمیت و کیفیت فضای سبز و ارتباط آنها با شرایط اجتماعی-اقتصادی محله در گوانگژو، چین: رویکردی جدید با استفاده از روش یادگیری عمیق و تصاویر نمای خیابان. حفظ کنید. جامعه شهرها 2021 ، 66 ، 102664. [ Google Scholar ] [ CrossRef ]
- Oke, TR اساس انرژی جزیره گرمای شهری. QJR Meteorol. Soc. 1982 ، 108 ، 1-24. [ Google Scholar ] [ CrossRef ]
- هلبیگ، ن. لوو، اچ. Lehning، M. رادیوسیتی رویکرد برای تعادل تابش سطح موج کوتاه در زمین پیچیده. J. Atmos. علمی 2009 ، 66 ، 2900-2912. [ Google Scholar ] [ CrossRef ]
- جیائو، ز. رن، اچ. مو، ایکس. ژائو، جی. وانگ، تی. Dong, J. ارزیابی چهار الگوریتم عامل نمای آسمان با استفاده از داده های مدل رقومی سطح و ارتفاع. علوم فضایی زمین 2019 ، 6 ، 222-237. [ Google Scholar ] [ CrossRef ]
- میدل، ا. لوکاشیک، جی. ماسیجوسکی، آر. دموزیر، م. Roth, M. Sky View Factor Footprints for Urban Climate Modeling. اقلیم شهری. 2018 ، 25 ، 120-134. [ Google Scholar ] [ CrossRef ]
- راسموس، اس. گوستافسون، دی. کویوسالو، اچ. لورن، آ. گرل، ا. کاوپینن، او. لاگنوال، او. لیندروث، ا. راسموس، ک. Svensson، M. تخمین شاخص سطح برگ زمستانی و کسر نمای آسمان برای مدلسازی برف در جنگلهای مخروطی شمالی: پیامدهای بر تعادل جرم و انرژی برف. هیدرول. فرآیندها 2013 ، 27 ، 2876-2891. [ Google Scholar ] [ CrossRef ]
- گونگ، F.-Y. Zeng، Z.-C.; ژانگ، اف. لی، ایکس. نگ، ای. نورفورد، LK نقشه برداری آسمان، درخت و عوامل نمای ساختمان دره های خیابان در یک محیط شهری با تراکم بالا. ساختن. محیط زیست 2018 ، 134 ، 155-167. [ Google Scholar ] [ CrossRef ]
- اندرسون، MC مطالعات آب و هوای نور جنگلی: I. محاسبات عکاسی شرایط نور. جی. اکول. 1964 ، 52 ، 27-41. [ Google Scholar ] [ CrossRef ]
- Steyn, D. محاسبه فاکتورهای دید از عکسهای با لنز چشم ماهی: یادداشت پژوهشی. در اتمسفر-اقیانوس ؛ Taylor & Francis: Oxfordshire, UK, 1980; جلد 18، ص 254–258. [ Google Scholar ]
- گال، تی. لیندبرگ، اف. Unger, J. محاسبه عوامل نمای آسمان پیوسته با استفاده از پایگاههای دادههای شطرنجی و برداری شهری سه بعدی: مقایسه و کاربرد در اقلیم شهری. نظریه. Appl. کلیماتول. 2009 ، 95 ، 111-123. [ Google Scholar ] [ CrossRef ]
- راتی، سی. Richens, P. Analysis Raster of Urban Form. محیط زیست طرح. B طرح. دس 2004 ، 31 ، 297-309. [ Google Scholar ] [ CrossRef ]
- کاراسکو-هرناندز، آر. اسمدلی، آر. Webb، AR با استفاده از هندسه های دره شهری به دست آمده از نمای خیابان گوگل برای مطالعات جوی: کاربردهای بالقوه در محاسبه تابش مجموع امواج کوتاه سطح خیابان. انرژی ساخت. 2015 ، 86 ، 340-348. [ Google Scholar ] [ CrossRef ]
- لی، ایکس. راتی، سی. سیفرلینگ، I. کمی کردن سایه درختان خیابان در منظر شهری: مطالعه موردی در بوستون، ایالات متحده، با استفاده از نمای خیابان گوگل. Landsc. طرح شهری. 2018 ، 169 ، 81-91. [ Google Scholar ] [ CrossRef ]
- لیانگ، جی. گونگ، جی. سان، ج. ژو، جی. لی، دبلیو. لی، ی. لیو، جی. Shen, S. تخمین ضریب نمای خودکار آسمان از عکسهای نمای خیابان – یک رویکرد داده بزرگ. Remote Sens. 2017 , 9 , 411. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- میدل، ا. لوکاشیک، جی. Maciejewski، R. عوامل نمای آسمان از عکسهای مصنوعی چشم ماهی برای مسیریابی آسایش حرارتی – مطالعه موردی در فینیکس، آریزونا. طرح شهری. 2017 ، 2 ، 19-30. [ Google Scholar ] [ CrossRef ]
- سوبل، آی. فلدمن، جی. اپراتور گرادیان ایزوتروپیک 3×3 برای پردازش تصویر. در گفتگو در پروژه مصنوعی استانفورد در ; تحقیقات علمی: Anaheim, CA, USA, 1968; ص 271-272. [ Google Scholar ]
- Laungrungthip، N. McKinnon، AE; چرچر، سی دی; Unsworth، K. تشخیص نواحی آسمان مبتنی بر لبه در تصاویر برای پیشبینی قرار گرفتن در معرض خورشید. در مجموعه مقالات بیست و سومین کنفرانس بین المللی 2008 تصویر و چشم انداز محاسبات نیوزلند، کرایست چرچ، نیوزلند، 26-28 نوامبر 2008; IEEE Computer Society: Silver Spring, MD, USA, 2008; صص 1-6. [ Google Scholar ]
- ژائو، اچ. شی، ج. Qi، X. وانگ، ایکس. شبکه تجزیه صحنه هرمی جیا، جی. در مجموعه مقالات کنفرانس IEEE در مورد دید رایانه و تشخیص الگو، هونولولو، HI، ایالات متحده آمریکا، 21 تا 26 ژوئیه 2017؛ IEEE Computer Society: Silver Spring, MD, USA, 2017; صص 2881-2890. [ Google Scholar ]
- جانسون، جی تی. واتسون، ID تعیین عوامل دید در دره های شهری. J. Appl. هواشناسی کلیماتول. 1984 ، 23 ، 329-335. [ Google Scholar ] [ CrossRef ]
- شاتا، RO; محمود، ق. فاهمی، ام. ارتباط فاکتور نمای آسمان با محیط حرارتی عابر پیاده در میدان پردیس دانشگاه گرم خشک. Sustainability 2021 , 13 , 468. [ Google Scholar ] [ CrossRef ]
- کیم، جی. لی، دی.-ک. براون، RD; کیم، اس. کیم، جی. اچ. Sung, S. اثر ضریب نمای بسیار پایین آسمان بر دمای سطح زمین در مناطق مسکونی شهری. حفظ کنید. جامعه شهرها 2022 , 80 , 103799. [ Google Scholar ] [ CrossRef ]
- سرین، ای. Saelens، BE; سالیس، جی اف. فرانک، مقیاس پیاده روی محیط محله LD: اعتبار و توسعه یک فرم کوتاه. پزشکی علمی ورزش ورزشی. 2006 ، 38 ، 1682. [ Google Scholar ] [ CrossRef ] [ PubMed ] [ نسخه سبز ]
- یوینگ، آر. Handy، S. اندازه گیری غیرقابل اندازه گیری: کیفیت های طراحی شهری مرتبط با قابلیت راه رفتن. J. Urban Des. 2009 ، 14 ، 65-84. [ Google Scholar ] [ CrossRef ]
- لافونتین، اس جی. سوادا، م. Kristjansson، E. یک روش مشاهده مستقیم برای حسابرسی مراکز بزرگ شهری با استفاده از نمونهگیری طبقهای، فناوری موبایل GIS و محیطهای مجازی. بین المللی J. Health Geogr. 2017 ، 16 ، 6. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- الیور، ام. دوهرتی، آر. کلی، پی. بدلند، اچ ام. ماووا، اس. شپرد، ج. کر، جی. مارشال، اس. همیلتون، ای. فاستر، سی. کاربرد عکاسی غیرفعال برای ممیزی عینی محیط ساخته شده ویژگی های سفرهای حمل و نقل فعال: یک مطالعه مشاهده ای. بین المللی J. Health Geogr. 2013 ، 12 ، 20. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- سامپسون، RJ; راودنبوش، مشاهده اجتماعی سیستماتیک فضاهای عمومی جنوب غربی: نگاهی جدید به بی نظمی در محله های شهری. صبح. جی. سوسیول. 1999 ، 105 ، 603-651. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بدلند، اچ ام. اوپیت، اس. ویتن، ک. کرنز، RA; Mavoa، S. آیا ممیزی های مجازی خیابان به طور قابل اعتمادی می توانند جایگزین ممیزی های فیزیکی نمای خیابان شوند؟ J. Urban Health 2010 ، 87 ، 1007-1016. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کلارک، پی. ایلشایر، جی. ملندز، آر. بادر، م. مورنوف، جی. استفاده از Google Earth برای انجام ممیزی محله: قابلیت اطمینان یک ابزار حسابرسی مجازی. Health Place 2010 ، 16 ، 1224-1229. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Odgers، CL; کاسپی، ع. بیتس، سی جی; سامپسون، RJ; موفیت، TE مشاهده اجتماعی سیستماتیک محله های کودکان با استفاده از نمای خیابان گوگل: روشی قابل اعتماد و مقرون به صرفه. جی روانی کودک. روانپزشکی 2012 ، 53 ، 1009-1017. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- وو، Y.-T. نش، پ. بارنز، LE; مینت، تی. متیوز، FE; جونز، ا. براین، سی. ارزیابی ویژگیهای محیطی مرتبط با سلامت روان: مطالعه قابلیت اطمینان تصاویر بصری منظره خیابان. BMC Public Health 2014 ، 14 ، 1094. [ Google Scholar ] [ CrossRef ] [ PubMed ] [ نسخه سبز ]
- نایک، ن. کومینرز، SD; راسکار، ر. گلیزر، EL; هیدالگو، کالیفرنیا، چشم انداز کامپیوتری پیش بینی کننده های تغییرات فیزیکی شهری را کشف می کند. Proc. Natl. آکادمی علمی ایالات متحده آمریکا 2017 ، 114 ، 7571–7576. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- نایک، ن. فیلیپوم، جی. راسکار، ر. Hidalgo, C. Streetscore-پیشبینی ایمنی درک شده یک میلیون منظره خیابانی. در مجموعه مقالات کنفرانس IEEE در کارگاه آموزشی بینایی رایانه و تشخیص الگو، کلمبوس، OH، ایالات متحده، 23 تا 28 ژوئن 2014. IEEE Computer Society: Silver Spring, MD, USA, 2014; صص 779-785. [ Google Scholar ]
- هویم، دی. افروس، AA; هیبرت، ام. قرار دادن اشیا در چشم انداز. بین المللی جی. کامپیوتر. Vis. 2008 ، 80 ، 3-15. [ Google Scholar ] [ CrossRef ]
- مالک، ج. بلنگی، اس. لئونگ، تی. Shi, J. تجزیه و تحلیل کانتور و بافت برای تقسیم بندی تصویر. بین المللی جی. کامپیوتر. Vis. 2001 ، 43 ، 7-27. [ Google Scholar ] [ CrossRef ]
- اولیوا، ا. Torralba، A. مدل سازی شکل صحنه: بازنمایی کل نگر از پوشش فضایی. بین المللی جی. کامپیوتر. Vis. 2001 ، 42 ، 145-175. [ Google Scholar ] [ CrossRef ]
- شولکوپف، بی. اسمولا، ای جی; ویلیامسون، آرسی بارتلت، PL الگوریتم های بردار پشتیبانی جدید. محاسبات عصبی 2000 ، 12 ، 1207-1245. [ Google Scholar ] [ CrossRef ]
- ایلیچ، ال. سوادا، م. زرزلی، الف. نقشه برداری عمیق در یک شهر بزرگ کانادا با استفاده از یادگیری عمیق و نمای خیابان گوگل. PLoS ONE 2019 , 14 , e0212814. [ Google Scholar ] [ CrossRef ]
- ژانگ، اف. ژو، بی. لیو، ال. لیو، ی. Fung، HH; لین، اچ. راتی، سی. اندازه گیری ادراک انسان از یک منطقه شهری در مقیاس بزرگ با استفاده از یادگیری ماشین. Landsc. طرح شهری. 2018 ، 180 ، 148-160. [ Google Scholar ] [ CrossRef ]
- مایکل، آر. ارزیابی آنلاین چشم انداز بصری با استفاده از تکنیک های بررسی اینترنتی. In Trends in Online Landscape Architecture: مجموعه مقالات در دانشگاه علوم کاربردی آنهالت ; Wichmann: Charlottesville، VA، USA، 2005; پ. 121. [ Google Scholar ]
- نسار، جی.ال. تصویر ارزیابی شهر. مربا. طرح. دانشیار 1990 ، 56 ، 41-53. [ Google Scholar ] [ CrossRef ]
- کوئرسیا، دی. O’Hare, NK; Cramer, H. Aesthetic Capital: چه چیزی لندن را زیبا، آرام و شاد می کند؟ در مجموعه مقالات هفدهمین کنفرانس ACM در زمینه کار تعاونی و محاسبات اجتماعی با پشتیبانی رایانه، بالتیمور، MD، ایالات متحده، 15 تا 19 فوریه 2014. ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2014; ص 945-955. [ Google Scholar ]
- کانگ، ی. جیا، Q. گائو، اس. زنگ، ایکس. وانگ، ی. انگسوسر، اس. لیو، ی. بله، X. فی، تی. استخراج احساسات انسانی در مکانهای مختلف بر اساس حالات چهره و تجزیه و تحلیل خوشهبندی فضایی. ترانس. GIS 2019 ، 23 ، 450-480. [ Google Scholar ] [ CrossRef ]
- استر، ام. کریگل، اچ.-پی. ساندر، جی. Xu, X. الگوریتم مبتنی بر چگالی برای کشف خوشهها در پایگاههای داده فضایی بزرگ با نویز. در SIGKDD ؛ ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 1996; جلد 96، ص 226–231. [ Google Scholar ]
- دوبی، ا. نایک، ن. پریخ، د. راسکار، ر. هیدالگو، کالیفرنیا یادگیری عمیق شهر: کمی سازی ادراک شهری در مقیاس جهانی . Springer: برلین/هایدلبرگ، آلمان، 2016; صص 196-212. [ Google Scholar ]
- گلیزر، EL; کومینرز، SD; لوکا، م. Naik، N. داده های بزرگ و شهرهای بزرگ: وعده ها و محدودیت های اقدامات بهبود یافته زندگی شهری. اقتصاد Inq. 2018 ، 56 ، 114-137. [ Google Scholar ] [ CrossRef ]
- ثالس، پ. شچتنر، ک. هیدالگو، کالیفرنیا تصویر مشارکتی شهر: نقشه برداری از نابرابری ادراک شهری. PLoS ONE 2013 ، 8 ، e68400. [ Google Scholar ]
- Joachims, T. طبقهبندی متن با ماشینهای بردار پشتیبان: یادگیری با بسیاری از ویژگیهای مرتبط . Springer: برلین/هایدلبرگ، آلمان، 1998; صص 137-142. [ Google Scholar ]
- محمد، ج. حسین، MS تشخیص احساسات برای محاسبات لبه شناختی با استفاده از یادگیری عمیق. IEEE Internet Things J. 2021 , 8 , 16894–16901. [ Google Scholar ] [ CrossRef ]
- لینچ، کی. تصویر محیط زیست. شهر تصویر 1960 ، 11 ، 1-13. [ Google Scholar ]
- اپل یارد، دی. سبک ها و روش های ساخت یک شهر. محیط زیست رفتار 1970 ، 2 ، 100-117. [ Google Scholar ] [ CrossRef ]
- ژانگ، اف. ژانگ، دی. لیو، ی. لین، اچ. نمایش مکانهای مکان با استفاده از عناصر صحنه. محاسبه کنید. محیط زیست سیستم شهری 2018 ، 71 ، 153-164. [ Google Scholar ] [ CrossRef ]
- ویاند، تی. کوستریکوف، آی. Philbin, J. Planet-Photo Geolocation with Convolutional Neural Networks ; Springer: برلین/هایدلبرگ، آلمان، 2016; صص 37-55. [ Google Scholar ]
- ژائو، ک. لیو، ی. هائو، اس. لو، اس. لیو، اچ. ژو، ال. جعبههای مرزی همه آن چیزی است که ما نیاز داریم: طبقهبندی تصویر نمای خیابان از طریق رمزگذاری زمینه ساختمانهای شناساییشده. IEEE Trans. Geosci. Remote Sens. 2021 , 60 , 21441499. [ Google Scholar ] [ CrossRef ]
- امیرزمان، م. کرتیس، ای. ژائو، ی. جمونناک، س. Ye, X. طبقهبندی مکانهای جرم بر اساس ظاهر بصری محله و روایتهای پلیسی: یک رویکرد یادگیری ماشینی. جی. کامپیوتر. Soc. علمی 2021 ، 4 ، 813-837. [ Google Scholar ] [ CrossRef ]
- d’Andrimont، R. لموئین، جی. Van der Velde، M. نظارت بر علفزار هدفمند در سطح بسته با استفاده از نگهبان، تصاویر سطح خیابان و مشاهدات میدانی. Remote Sens. 2018 , 10 , 1300. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- de Sá، TH; تاینیو، ام. گودمن، آ. ادواردز، پی. هاینز، ای. گوویا، ن. مونتیرو، سی. Woodcock, J. مدلسازی تأثیر سلامتی الگوهای مختلف سفر در مورد فعالیت بدنی، آلودگی هوا و آسیبهای جادهای برای سائوپائولو، برزیل. محیط زیست بین المللی 2017 ، 108 ، 22-31. [ Google Scholar ]
- زنت، KE; Choudhury، CF منابع بزرگ داده های نوظهور برای برنامه ریزی حمل و نقل عمومی: مروری سیستماتیک در مورد وضعیت فعلی هنر و جهت گیری های تحقیقاتی آینده. J. Inst Indian. علمی 2019 ، 99 ، 601-619. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کالابرس، اف. دیائو، م. دی لورنزو، جی. فریرا، جی.، جونیور. Ratti, C. درک الگوهای تحرک فردی از داده های سنجش شهری: نمونه ردیابی تلفن همراه. ترانسپ Res. قسمت C Emerg. تکنولوژی 2013 ، 26 ، 301-313. [ Google Scholar ] [ CrossRef ]
- گونزالس، ام سی؛ هیدالگو، کالیفرنیا؛ برعباسی، ع.-ل. درک الگوهای تحرک فردی انسان. طبیعت 2008 ، 453 ، 779-782. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- کونگ، KS; گرکو، ک. سوبولفسکی، اس. Ratti, C. بررسی الگوهای جهانی در رفت و آمد انسان در خانه-کار از داده های تلفن همراه. PLoS ONE 2014 ، 9 ، e96180. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آراسه، ی. Xie، X. هارا، ت. Nishio, S. Mining People’s Trips از عکس های دارای برچسب جغرافیایی در مقیاس بزرگ. در مجموعه مقالات هجدهمین کنفرانس بین المللی ACM در چند رسانه ای، Firenze، ایتالیا، 25-29 اکتبر 2010. ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2010; صص 133-142. [ Google Scholar ]
- چنگ، A.-J. چن، Y.-Y.; هوانگ، Y.-T. Hsu، WH; Liao، H.-YM توصیه سفر شخصی شده توسط افراد معدن ویژگیهای عکسهای مشارکتشده در جامعه. در مجموعه مقالات نوزدهمین کنفرانس بین المللی ACM در چند رسانه ای، اسکاتسدیل، AZ، ایالات متحده، 28 نوامبر تا 1 دسامبر 2011. ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2011; صص 83-92. [ Google Scholar ]
- گوئل، آر. گارسیا، ال.ام. گودمن، آ. جانسون، آر. آلدرد، آر. موروگسان، م. براژ، اس. بهلا، ک. وودکاک، جی. برآورد الگوهای سفر در سطح شهر با استفاده از تصاویر خیابانی: مطالعه موردی استفاده از نمای خیابان گوگل در بریتانیا. PLoS ONE 2018 , 13 , e0196521. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مرالی، اچ اس. لین، L.-Y.; لی، کیو. Bhalla، K. استفاده از تصاویر خیابانی و بازارهای اینترنتی جمع سپاری برای اندازه گیری استفاده از کلاه ایمنی موتورسیکلت در بانکوک، تایلند. Inj. قبلی 2020 ، 26 ، 103-108. [ Google Scholar ] [ CrossRef ]
- یین، ال. چنگ، کیو. وانگ، ز. Shao, Z. “داده های بزرگ” برای حجم عابر پیاده: کاوش در استفاده از تصاویر نمای خیابان Google برای تعداد عابر پیاده. Appl. Geogr. 2015 ، 63 ، 337-345. [ Google Scholar ] [ CrossRef ]
- زینگ، ایکس. هوانگ، ز. چنگ، ایکس. زو، دی. کانگ، سی. ژانگ، اف. لیو، ی. نقشه برداری حجم فعالیت های انسانی از طریق تصاویر سنجش از دور. IEEE J. Sel. بالا. Appl. زمین Obs. Remote Sens. 2020 , 13 , 5652–5668. [ Google Scholar ] [ CrossRef ]
- رایششتاین، ام. کمپز-والز، جی. استیونز، بی. یونگ، ام. دنزلر، جی. Carvalhais، N. یادگیری عمیق و درک فرآیند برای علم سیستم زمین مبتنی بر داده. Nature 2019 ، 566 ، 195-204. [ Google Scholar ] [ CrossRef ]
- اشمید، اف. وانگ، ی. هارو، ای. راهنمای نوکستینگ – خلاصه. بولتن 2019 ، 68 ، 2. [ Google Scholar ]
- سان، ج. ژو، ام. ویلسون، جی دبلیو. زاوادزکی، آی. بالارد، اس پی; اونولي هويمير، ج. جو، پی. بارکر، DM; لی، P.-W. گلدینگ، ب. استفاده از NWP برای بارش همرفتی در حال پخش: پیشرفتها و چالشهای اخیر. گاو نر صبح. هواشناسی Soc. 2014 ، 95 ، 409-426. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بائر، پی. تورپ، آ. برونت، جی. انقلاب آرام پیش بینی آب و هوا. Nature 2015 ، 525 ، 47-55. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- بولر، NE; پیرس، م. Seed, A. توسعه یک الگوریتم بارش بر اساس تکنیک های جریان نوری. جی هیدرول. 2004 ، 288 ، 74-91. [ Google Scholar ] [ CrossRef ]
- Sakaino، H. روش پیشبینی الگوی تصویر فضایی-زمانی بر اساس یک مدل فیزیکی با جریان نوری متغیر با زمان. IEEE Trans. Geosci. Remote Sens. 2012 , 51 , 3023–3036. [ Google Scholar ] [ CrossRef ]
- وو، دبلیو. Wong, W. کاربرد تکنیکهای جریان نوری در بارش باران. در مجموعه مقالات بیست و هفتمین کنفرانس در مورد طوفان های شدید محلی، مدیسون، WI، ایالات متحده آمریکا، 3 تا 7 نوامبر 2014. [ Google Scholar ]
- متیو، ام. کوپری، سی. LeCun، Y. پیشبینی ویدیوی چند مقیاسی عمیق فراتر از میانگین مربعات خطا. arXiv 2015 ، arXiv:1511.05440. [ Google Scholar ]
- یو، بی. یین، اچ. Zhu, Z. شبکههای کانولوشنال نمودار فضایی-زمانی: چارچوب یادگیری عمیق برای پیشبینی ترافیک. arXiv 2017 , arXiv:1709.04875. [ Google Scholar ]
- رانزاتو، م. اسلم، آ. برونا، جی. متیو، ام. کولوبرت، آر. Chopra, S. مدلسازی ویدیویی (زبان): پایهای برای مدلهای تولیدی ویدیوهای طبیعی. arXiv 2014 ، arXiv:1412.6604. [ Google Scholar ]
- وندریک، سی. پیرسیاوش، ح. Torralba، A. تولید ویدئو با پویایی صحنه. Adv. عصبی Inf. روند. سیستم 2016 , 29 . در دسترس آنلاین: https://proceedings.neurips.cc/paper/2016/file/04025959b191f8f9de3f924f0940515f-Paper.pdf (در 1 مارس 2022 قابل دسترسی است).
- سریواستاوا، ن. مانسیموف، ای. Salakhudinov, R. یادگیری بدون نظارت بازنمایی های ویدئویی با استفاده از LSTM. در مجموعه مقالات کنفرانس بین المللی یادگیری ماشین، PMLR، لیل، فرانسه، 6 تا 11 ژوئیه 2015. Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 2015; صص 843-852. [ Google Scholar ]
- شی، ایکس. چن، ز. وانگ، اچ. یونگ، دی.-ای. وانگ، دبلیو.-ک. Woo, W. Convolutional LSTM Network: A Machine Learning Approach for Precipitation Nowcasting. Adv. عصبی Inf. روند. سیستم 2015 ، 28 ، 802-810. [ Google Scholar ]
- جیا، ایکس. دی براباندر، بی. تویتلارس، تی. شبکه های فیلتر پویا Gool، LV. Adv. عصبی Inf. روند. سیستم 2016 ، 29 ، 667-675. [ Google Scholar ]
- وانگ، ی. لانگ، م. وانگ، جی. گائو، ز. Yu, PS Predrnn: شبکه های عصبی تکراری برای یادگیری پیش بینی با استفاده از LSTM های فضایی و زمانی. Adv. عصبی Inf. روند. سیستم 2017 ، 30 ، 879-888. [ Google Scholar ]
- وانگ، ی. ژانگ، جی. زو، اچ. لانگ، م. وانگ، جی. Yu، PS Memory in Memory: یک شبکه عصبی پیشبینیکننده برای یادگیری غیرایستایی مرتبه بالاتر از دینامیک فضایی-زمانی. در مجموعه مقالات کنفرانس IEEE/CVF در مورد دید کامپیوتری و تشخیص الگو، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 15 تا 20 ژوئن 2019؛ IEEE Computer Society: Silver Spring، MD، ایالات متحده آمریکا، 2019؛ ص 9154–9162. [ Google Scholar ]
- شی، ایکس. گائو، ز. لاوزن، ال. وانگ، اچ. یونگ، دی.-ای. وانگ، دبلیو. Woo, W. Deep Learning for Precipitation Nowcasting: A Benchmark and a New Model. در پیشرفت در سیستم های پردازش اطلاعات عصبی ; Morgan Kaufmann Publishers Inc.: San Francisco, CA, USA, 2017; جلد 30، در دسترس آنلاین: https://proceedings.neurips.cc/paper/2017/file/a6db4ed04f1621a119799fd3d7545d3d-Paper.pdf (در 1 مارس 2022 قابل دسترسی است).
- وانگ، ی. جیانگ، ال. یانگ، M.-H. لی، ال.-جی. لانگ، م. Fei-Fei، L. Eidetic 3D LSTM: مدلی برای پیشبینی ویدئو و فراتر از آن. در مجموعه مقالات کنفرانس بین المللی نمایندگی های یادگیری، ونکوور، BC، کانادا، 30 آوریل تا 3 مه 2018؛ در دسترس آنلاین: https://openreview.net/forum?id=B1lKS2AqtX (در 1 مارس 2022 قابل دسترسی است).
- لین، ز. لی، ام. ژنگ، ز. چنگ، ی. یوان، سی. Convlstm توجه به خود برای پیش بینی فضایی و زمانی. در مجموعه مقالات کنفرانس AAAI در مورد هوش مصنوعی، نیویورک، نیویورک، ایالات متحده آمریکا، 7 تا 12 فوریه 2020؛ مطبوعات AAAI: پالو آلتو، کالیفرنیا، ایالات متحده آمریکا، 2020؛ جلد 34، ص 11531–11538. [ Google Scholar ]
- ویلگاس، آر. یانگ، جی. هونگ، اس. لین، ایکس. لی، اچ. حرکت تجزیه و محتوا برای پیشبینی توالی ویدیوی طبیعی. arXiv 2017 , arXiv:1706.08033. [ Google Scholar ]
- Yan، B.-Y.; یانگ، سی. چن، اف. تاکدا، ک. Wang, C. FDNet: یک رویکرد یادگیری عمیق با دو مسیر رمزگذاری متقاطع موازی برای بارش باران arXiv 2021 ، arXiv:2105.02585. [ Google Scholar ]
- بنیستون، ام. پیوند رویدادهای اقلیمی شدید و تأثیرات اقتصادی: نمونه هایی از آلپ سوئیس. سیاست انرژی 2007 ، 35 ، 5384-5392. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- بل، جی. قهوه ای، CL; کانلون، ک. شاه ماهی، اس. Kunkel، KE; لاوریمور، جی. لوبر، جی. شرک، سی. اسمیت، ا. Uejio, C. تغییرات در رویدادهای شدید و تأثیرات بالقوه بر سلامت انسان. J. Air Waste Manag. دانشیار 2018 ، 68 ، 265-287. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- باینا، س. ویشوانات، وی. دارت، ای. ونر، ام. Collins, WD TECA: Petascale Pattern Recognition for Climate Science. در مجموعه مقالات کنفرانس بین المللی تحلیل کامپیوتری تصاویر و الگوها، والتا، مالت، 2 تا 4 سپتامبر 2015. Springer: برلین/هایدلبرگ، آلمان، 2015; ص 426-436. [ Google Scholar ]
- والش، ک. واترسون، گردابهای طوفانمانند استوایی IG در مدل منطقه محدود: مقایسه با اقلیمشناسی مشاهدهشده. جی. کلیم. 1997 ، 10 ، 2240-2259. [ Google Scholar ] [ CrossRef ]
- لیو، ی. راچه، ای. کوریا، جی. خسروشاهی، ع. لیورز، دی. کانکل، ک. ونر، ام. کالینز، دبلیو. کاربرد شبکه های عصبی پیچیده عمیق برای تشخیص آب و هوای شدید در مجموعه داده های آب و هوایی. arXiv 2016 , arXiv:1605.01156. [ Google Scholar ]
- راچه، ای. بکهام، سی. ماهاراج، ت. ابراهیمی کاهو، س. پرابهات، ام. Pal, C. Extremeweather: مجموعه داده های آب و هوایی در مقیاس بزرگ برای تشخیص نیمه نظارتی، محلی سازی و درک رویدادهای شدید آب و هوایی. Adv. عصبی Inf. روند. سیستم 2017 ، 30 ، 3405-3416. [ Google Scholar ]
- ژانگ، دبلیو. هان، ال. سان، ج. گوا، اچ. Dai, J. کاربرد شبکه کانولوشن پی در پی مکعب سه بعدی چند کاناله برای پخش طوفان همرفتی. در مجموعه مقالات کنفرانس بینالمللی IEEE 2019 درباره دادههای بزرگ (دادههای بزرگ)، لسآنجلس، کالیفرنیا، ایالات متحده آمریکا، 9 تا 12 دسامبر 2019؛ IEEE Computer Society: Silver Spring، MD، ایالات متحده آمریکا، 2019؛ صفحات 1705-1710. [ Google Scholar ]
- کورث، تی. ژانگ، جی. ستایش، ن. راچه، ای. میتلیاگاس، آی. پاتواری، MMA؛ مالاس، تی. ساندارام، ن. بهیمجی، دبلیو. Smorkalov، M. یادگیری عمیق در 15pf: طبقه بندی نظارت شده و نیمه نظارت شده برای داده های علمی. در مجموعه مقالات کنفرانس بین المللی محاسبات با عملکرد بالا، شبکه، ذخیره سازی و تجزیه و تحلیل، دنور، CO، ایالات متحده، 12-17 نوامبر 2017. ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2017؛ صص 1-11. [ Google Scholar ]
- کورث، تی. ترایچلر، اس. رومرو، جی. مودیگوندا، ام. لوهر، ن. فیلیپس، ای. ماهش، ع. متسون، ام. دسلیپ، جی. Fatica، M. Exascale Deep Learning for Climate Analytics. در مجموعه مقالات SC18: کنفرانس بین المللی برای محاسبات با عملکرد بالا، شبکه، ذخیره سازی و تجزیه و تحلیل، دالاس، TX، ایالات متحده، 11-16 نوامبر 2018. IEEE Computer Society: Silver Spring, MD, USA, 2018; صص 649-660. [ Google Scholar ]
- بونفانتی، سی. ترایلویچ، ال. استوارت، جی. Govett, M. Machine Learning: Defining Worldwide Cyclone Labels for Training. در مجموعه مقالات بیست و یکمین کنفرانس بینالمللی فیوژن اطلاعات (FUSION)، کمبریج، بریتانیا، 10 تا 13 ژوئیه 2018؛ IEEE: Silver Spring, MD, USA, 2018; صص 753-760. [ Google Scholar ]
- هرسباخ، اچ. بل، بی. بریسفورد، پی. هیراهارا، س. هورانی، ا. مونوز ساباتر، جی. نیکلاس، جی. پیبی، سی. رادو، آر. Schepers، D. تحلیل مجدد جهانی ERA5. QJR Meteorol. Soc. 2020 ، 146 ، 1999-2049. [ Google Scholar ] [ CrossRef ]
- راسپ، اس. دوبن، PD; شر، اس. وین، جی. معتدید، س. Thuerey، N. WeatherBench: مجموعه داده های معیار برای پیش بینی آب و هوا مبتنی بر داده. J. Adv. مدل. سیستم زمین 2020 , 12 , e2020MS002203. [ Google Scholar ] [ CrossRef ]
- آلن، تشخیص خودکار زلزله RV و زمان بندی از تک ردیابی. گاو نر سیسمول. Soc. صبح. 1978 ، 68 ، 1521-1532. [ Google Scholar ] [ CrossRef ]
- بای، سی. Kennett، BLN فاز تشخیص و شناسایی خودکار با استفاده کامل از یک لرزه نگاری پهن باند سه جزیی. گاو نر سیسمول. Soc. صبح. 2000 ، 90 ، 187-198. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لومکس، ا. ساتریانو، سی. Vassallo، M. توسعهها و بهینهسازی خودکار انتخابگر: FilterPicker—یک انتخابگر قوی و پهنباند برای پایش لرزهای بیدرنگ و هشدار اولیه زلزله. سیسمول. Res. Lett. 2012 ، 83 ، 531-540. [ Google Scholar ] [ CrossRef ]
- Dietz, L. نکاتی در مورد پیکربندی BINDER_EW: همبسته فاز کرم خاکی. در دسترس آنلاین: https://www.isti2.com/ew/ovr/bindersetup.html (در 1 مارس 2022 قابل دسترسی است).
- جانسون، CE; لیند، ا. هیرشورن، بی. انجمن فاز منطقه ای قوی ؛ USGS: Reston، VA، ایالات متحده آمریکا، 1997. [ Google Scholar ]
- پاتون، جی.ام. پسر، آقای. بنز، اچ ام. Buland، RP; اریکسون، BK; Kragness، DS Hydra— مرکز ملی اطلاعات زلزله 24/7 مانیتورینگ لرزه ای، تجزیه و تحلیل، تولید کاتالوگ، تجزیه و تحلیل کیفیت، و مجموعه ابزار مطالعات ویژه ؛ وزارت کشور ایالات متحده، سازمان زمین شناسی ایالات متحده: واشنگتن، دی سی، ایالات متحده آمریکا، 2016. [ Google Scholar ]
- استوارت، تشخیص زمان واقعی SW و مکان رویدادهای لرزهای محلی در کالیفرنیای مرکزی. گاو نر سیسمول. Soc. صبح. 1977 ، 67 ، 433-452. [ Google Scholar ] [ CrossRef ]
- آرورا، NS; راسل، اس. سادرث، E. NET-VISA: پردازش شبکه تحلیل لرزهای یکپارچه عمودی. گاو نر سیسمول. Soc. صبح. 2013 ، 103 ، 709-729. [ Google Scholar ] [ CrossRef ]
- زو، ال. چوانگ، ال. McClellan، JH; لیو، ای. پنگ، زی. یک رویکرد چند کاناله برای ارتباط خودکار رویداد ریز لرزهای با استفاده از خوشهبندی رویداد زمان رسیدن مبتنی بر Ransac (Ratec). زمین Res. Adv. 2021 ، 1 ، 100008. [ Google Scholar ] [ CrossRef ]
- مکان زلزله غیرخطی توربر، CH: تئوری و مثال ها. گاو نر سیسمول. Soc. صبح. 1985 ، 75 ، 779-790. [ Google Scholar ] [ CrossRef ]
- لومکس، ا. ویریو، جی. Volant، P. Berge-Thierry، C. مکان یابی احتمالی زلزله در مدل های سه بعدی و لایه ای. در پیشرفت در مکان یابی رویداد لرزه ای ; Springer: برلین/هایدلبرگ، آلمان، 2000; صص 101-134. [ Google Scholar ]
- Gibbons، SJ; Ringdal، F. تشخیص رویدادهای لرزهای با قدر کم با استفاده از همبستگی شکل موج مبتنی بر آرایه. ژئوفیز. J. Int. 2006 ، 165 ، 149-166. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژانگ، ام. Wen, L. یک روش مؤثر برای تشخیص رویدادهای کوچک: مطابقت و مکان (M&L). ژئوفیز. J. Int. 2015 ، 200 ، 1523-1537. [ Google Scholar ]
- کائو، اچ. شان، اس.-جی. الگوریتم اسکن منبع: نقشه برداری از توزیع منابع لرزه ای در زمان و مکان. ژئوفیز. J. Int. 2004 ، 157 ، 589-594. [ Google Scholar ] [ CrossRef ]
- لی، ز. پنگ، ز. هالیس، دی. زو، ال. McClellan, J. تشخیص رویداد لرزهای با وضوح بالا با استفاده از شباهت محلی برای آرایههای N بزرگ. علمی 2018 ، 8 ، 1646. [ Google Scholar ] [ CrossRef ] [ PubMed ] [ نسخه سبز ]
- پرول، تی. غربی، م. Denolle، M. شبکه عصبی کانولوشن برای تشخیص و مکان یابی زلزله. علمی Adv. 2018 , 4 , e1700578. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- راس، ZE؛ مایر، M.-A.; Hauksson، E. P Wave Arrival Picking و تعیین قطبیت حرکت اول با یادگیری عمیق. جی. ژئوفیس. Res. زمین جامد 2018 ، 123 ، 5120–5129. [ Google Scholar ] [ CrossRef ]
- راس، ZE؛ مایر، M.-A.; هاوکسون، ای. Heaton، TH تشخیص فاز لرزه ای تعمیم یافته با یادگیری عمیق. گاو نر سیسمول. Soc. صبح. 2018 ، 108 ، 2894-2901. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- زو، ال. پنگ، ز. مک کللان، جی. لی، سی. یائو، دی. لی، ز. Fang, L. Deep Learning برای تشخیص فاز لرزه ای و برداشت در منطقه پس لرزه 2008 Mw7. 9 زلزله ونچوان. فیزیک سیاره زمین. اینتر 2019 ، 293 ، 106261. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- زو، دبلیو. Beroza، GC PhaseNet: یک روش انتخاب زمان ورود لرزه ای مبتنی بر شبکه عصبی عمیق. ژئوفیز. J. Int. 2019 ، 216 ، 261-273. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- ژو، ی. یو، اچ. کنگ، کیو. Zhou، S. الگوریتم تشخیص رویداد ترکیبی و انتخاب فاز با استفاده از شبکههای عصبی کانولوشنال و مکرر. سیسمول. Res. Lett. 2019 ، 90 ، 1079–1087. [ Google Scholar ] [ CrossRef ]
- موسوی، س.م. Ellsworth، WL; زو، دبلیو. چوانگ، LY; Beroza، ترانسفورماتور زلزله GC – یک مدل یادگیری عمیق دقیق برای تشخیص همزمان زلزله و انتخاب فاز. نات اشتراک. 2020 ، 11 ، 3952. [ Google Scholar ] [ CrossRef ]
- McBrearty، IW; دلوری، AA; جانسون، انجمن PA Pairwise از ورودهای لرزه ای با شبکه های عصبی کانولوشن. سیسمول. Res. Lett. 2019 ، 90 ، 503-509. [ Google Scholar ] [ CrossRef ]
- راس، ZE؛ یو، ی. مایر، M.-A.; هاوکسون، ای. Heaton، TH PhaseLink: یک رویکرد یادگیری عمیق برای انجمن فاز لرزه ای. جی. ژئوفیس. Res. زمین جامد 2019 ، 124 ، 856–869. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- زو، دبلیو. تای، KS; موسوی، س.م. بیلیس، پ. Beroza، GC یک روش تشخیص زمینلرزه سرتاسر برای انتخاب فاز مشترک و ارتباط با استفاده از یادگیری عمیق. arXiv 2021 ، arXiv:2109.09911. [ Google Scholar ] [ CrossRef ]
- وانگ، دی. گوان، دی. زو، اس. Kinnon، MM; گنگ، جی. ژانگ، Q. ژنگ، اچ. لی، تی. شائو، اس. گونگ، P. ردپای اقتصادی آتشسوزیهای کالیفرنیا در سال 2018. Nat. حفظ کنید. 2021 ، 4 ، 252-260. [ Google Scholar ] [ CrossRef ]
- Wuebbles، DJ Impacts, Risks, and Adaption در ایالات متحده: چهارمین ارزیابی ملی آب و هوای ایالات متحده، جلد دوم. در دایره المعارف علمی جهانی تغییرات آب و هوا: مطالعات موردی خطر آب و هوا، اقدام و فرصت جلد 3 ; جهانی علمی: سنگاپور، 2021; صص 85-98. [ Google Scholar ]
- Finney، MA FARSITE، شبیه ساز منطقه آتش سوزی – توسعه و ارزیابی مدل ؛ وزارت کشاورزی ایالات متحده، خدمات جنگل، ایستگاه تحقیقاتی کوه راکی: فورت کالینز، CO، ایالات متحده آمریکا، 1998. [ Google Scholar ]
- اوکانر، سی دی; تامپسون، نماینده مجلس؛ رودریگز و سیلوا، اف. پیشی گرفتن از مشکل آتشسوزی: تعیین کمیت و نقشهبرداری چالشها و فرصتهای مدیریت. Geosciences 2016 ، 6 ، 35. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- تولهورست، ک. شیلدز، بی. Chong, D. Phoenix: توسعه و کاربرد ابزار مدیریت خطر آتش سوزی در جنگل. اوست J. Emerg. مدیریت 2008 ، 23 ، 47-54. [ Google Scholar ]
- تیمسترا، سی. برایس، RW; Wotton، BM; تیلور، SW; آرمیتاژ، توسعه OB و ساختار پرومتئوس: مدل شبیهسازی رشد آتشسوزی وحشی کانادا. در منابع طبیعی کانادا، خدمات جنگلداری کانادا ؛ گزارش اطلاعات NOR-X-417; مرکز جنگلداری شمالی: ادمونتون، AB، کانادا، 2010. [ Google Scholar ]
- هانسون، اچ پی؛ بردلی، ام. Bossert, JE; لین، آر آر. Younker, LW The Potential and Promise of Physics-based Wildfire Simulation. محیط زیست علمی Policy 2000 , 3 , 161-172. [ Google Scholar ] [ CrossRef ]
- گیسو، تی. آرکا، بی. پلیزارو، جی. Duce، P. خودکار سلولی بهبود یافته برای گسترش آتش سوزی. Procedia Comput. علمی 2015 ، 51 ، 2287-2296. [ Google Scholar ] [ CrossRef ]
- جانستون، پی. کلسو، جی. Milne، GJ شبیه سازی کارآمد گسترش آتش سوزی در یک شبکه نامنظم. بین المللی J. Wildland Fire 2008 ، 17 ، 614-627. [ Google Scholar ] [ CrossRef ]
- پیس، سی. کاراسکو، جی. مارتل، دی ال. واینتراب، ای. Woodruff، DL Cell2fire: مدل رشد آتش سوزی جنگلی مبتنی بر سلول. arXiv 2019 ، arXiv:1905.09317. [ Google Scholar ]
- الساندری، ا. باگنرینی، پ. گاگرو، م. Mantelli, L. تخمین پارامتر مدلهای انتشار آتش با استفاده از روشهای مجموعه سطح. Appl. ریاضی. مدل. 2021 ، 92 ، 731-747. [ Google Scholar ] [ CrossRef ]
- مالت، وی. Keyes، DE; Fendell، FE مدل سازی انتشار آتش در سرزمین های وحشی با روش های مجموعه سطح. محاسبه کنید. ریاضی. Appl. 2009 ، 57 ، 1089-1101. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Rochoux، MC; ریچی، اس. لوکور، دی. کوئنوت، بی. Trouvé، A. به سوی شبیهسازیهای مبتنی بر دادههای پیشبینیکننده گسترش آتشسوزی – بخش اول: مجموعه فیلتر کالمن با هزینه کاهشیافته بر اساس یک مدل جایگزین آشوب چند جملهای برای تخمین پارامتر. نات سیستم خطرات زمین. علمی 2014 ، 14 ، 2951-2973. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کائو، ی. وانگ، ام. لیو، ک. ارزیابی حساسیت به آتشسوزی در جنوب چین: مقایسه روشهای چندگانه. بین المللی J. Disaster Risk Sci. 2017 ، 8 ، 164-181. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کاستلی، م. وانشی، ال. Popovič، A. پیش بینی مناطق سوخته آتش سوزی جنگل: رویکرد هوش مصنوعی. اکول آتش نشانی 2015 ، 11 ، 106-118. [ Google Scholar ] [ CrossRef ]
- صافی، ی. برومی، ع. پیشبینی آتشسوزی جنگلها با استفاده از شبکههای عصبی مصنوعی. Appl. ریاضی. علمی 2013 ، 7 ، 271-286. [ Google Scholar ] [ CrossRef ]
- جین، پی. کوگان، SC; سوبرامانیان، اس جی; کراولی، ام. تیلور، اس. Flannigan، MD مروری بر کاربردهای یادگیری ماشین در علم و مدیریت آتش سوزی. محیط زیست Rev. 2020 , 28 , 478–505. [ Google Scholar ] [ CrossRef ]
- گاناپاتی سوبرامانیان، اس. کراولی، ام. ترکیب MCTS و A3C برای پیشبینی فرآیندهای گسترش فضایی در تنظیمات آتشسوزی جنگل. در مجموعه مقالات کنفرانس کانادایی هوش مصنوعی، تورنتو، ON، کانادا، 8 تا 11 مه 2018؛ Springer: برلین/هایدلبرگ، آلمان، 2018; ص 285-291. [ Google Scholar ]
- رادکه، دی. هسلر، آ. Ellsworth، D. FireCast: Leveraging Deep Learning برای پیش بینی گسترش آتش سوزی. در مجموعه مقالات IJCAI، ماکائو، چین، 10-16 اوت 2019؛ ص 4575-4581. [ Google Scholar ]
- آلر، اف. مالت، وی. فیلیپی، J.-B. شبیه سازی شبیه سازی گسترش آتش وحشی با استفاده از یادگیری عمیق. شبکه عصبی 2021 ، 141 ، 184-198. [ Google Scholar ] [ CrossRef ]
- Hodges، JL; Lattimer، توسط Wildland Fire Spread Modeling با استفاده از شبکه های عصبی کانولوشن. فناوری آتش نشانی 2019 ، 55 ، 2115–2142. [ Google Scholar ] [ CrossRef ]
- تانسلی، م. مارشال، جریان DP از کنار یک استوانه در صفحه β، با کاربرد برای جداسازی جریان خلیج فارس و جریان قطبی قطب جنوب. J. Phys. اقیانوسگر. 2001 ، 31 ، 3274-3283. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رومیچ، دی. گیلسون، جی. ادی انتقال گرما و آبهای ترموکلاین در شمال اقیانوس آرام: کلیدی برای تنوع آب و هوایی بین سالانه/دههای؟ J. Phys. اقیانوسگر. 2001 ، 31 ، 675-687. [ Google Scholar ] [ CrossRef ]
- فرنگر، آی. گروبر، ن. کنوتی، آر. Münnich, M. Imprint of Southern Ocean Edies on winds, clouds and rainfall. نات Geosci. 2013 ، 6 ، 608-612. [ Google Scholar ] [ CrossRef ]
- چلتون، دی.بی. Gaube، P. Schlax، MG; اوایل، جی جی; ساملسون، RM تأثیر گردابهای غیرخطی میان مقیاس بر روی کلروفیل اقیانوسی نزدیک به سطح. علوم 2011 ، 334 ، 328-332. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Gaube، P. McGillicuddy، DJ, Jr. تأثیر گردابها و پیچخطهای جریان خلیج فارس بر کلروفیل نزدیک به سطح. Deep Sea Res. قسمت اول Oceanogr. Res. پاپ 2017 ، 122 ، 1-16. [ Google Scholar ] [ CrossRef ]
- Okubo، A. پراکندگی افقی ذرات شناور در مجاورت تکینگی های سرعت مانند همگرایی ها. Deep Sea Res. اقیانوسگر. Abstr. 1970 ، 17 ، 445-454. [ Google Scholar ] [ CrossRef ]
- ویس، جی. دینامیک انتقال آنستروفی در هیدرودینامیک دو بعدی. فیزیک D پدیده غیرخطی. 1991 ، 48 ، 273-294. [ Google Scholar ] [ CrossRef ]
- چلتون، دی.بی. Schlax، MG; ساملسون، آر.ام. د شوکه، RA مشاهدات جهانی گرداب های بزرگ اقیانوسی. ژئوفیز. Res. Lett. 2007 ، 34 . [ Google Scholar ] [ CrossRef ]
- Isern-Fontanet، J. گارسیا-لادونا، ای. فونت، J. شناسایی گرداب های دریایی از نقشه های ارتفاعی. J. Atmos. اقیانوس. تکنولوژی 2003 ، 20 ، 772-778. [ Google Scholar ] [ CrossRef ]
- مورو، آر. بیرول، اف. گریفین، دی. Sudre, J. مسیرهای واگرای گرداب های اقیانوسی چرخه دار و ضد گردابی. ژئوفیز. Res. Lett. 2004 ، 31 . [ Google Scholar ] [ CrossRef ]
- Doglioli، AM; بلانک، بی. اسپیچ، اس. Lapeyre, G. ردیابی ساختارهای منسجم در یک مدل اقیانوسی منطقهای با تحلیل موجک: کاربرد در گردابهای حوضه کیپ. جی. ژئوفیس. Res. اقیانوس. 2007 ، 112 ، C5. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- توریل، ا. Isern-Fontanet، J. گارسیا-لادونا، E. فیلتر موجک برای استخراج گرداب های منسجم از داده های ارتفاعی. J. Atmos. اقیانوس. تکنولوژی 2007 ، 24 ، 2103-2119. [ Google Scholar ] [ CrossRef ]
- Chaigneau، A. گیزولمه، ا. Grados, C. Mesoscale Eddies در پرو در رکوردهای ارتفاع سنج: الگوریتم های شناسایی و الگوهای فضایی-زمانی گردابی. Prog. اقیانوسگر. 2008 ، 79 ، 106-119. [ Google Scholar ] [ CrossRef ]
- Sadarjoen، IA; پست، FH; ما، بی. بانک ها، دی سی؛ پاجدارم، اچ.-جی. تجسم انتخابی گرداب ها در جریان های هیدرودینامیکی. در Proceedings of the Visualization ’98 (Cat. No. 98CB36276), Research Triangle Park, NC, USA, 18-23 اکتبر 1998; IEEE: Silver Spring, MD, USA, 1998; صص 419-422. [ Google Scholar ]
- وییکمی، بی. Torsvik، T. کمی سازی و مشخصه یابی گرداب های میان مقیاس با الگوریتم های مختلف شناسایی خودکار. جی. ساحل. Res. 2013 ، 65 ، 2077-2082. [ Google Scholar ] [ CrossRef ]
- یی، جی. دو، ی. او، ز. ژو، سی. افزایش دقت تشخیص خودکار گردابی و قابلیت تشخیص ساختارهای چند هسته ای از نقشه های ناهنجاری سطح دریا. اقیانوس. علمی 2014 ، 10 ، 39-48. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- جورج، TM; Manucharyan، GE; تامپسون، AF Deep Learning برای استنباط شارهای گرمای گردابی از الگوهای ارتفاع سطح دریا در آشفتگی مقیاس متوسط. نات اشتراک. 2021 ، 12 ، 800. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- کورتس، سی. Vapnik، V. پشتیبانی-بردار شبکه. ماخ فرا گرفتن. 1995 ، 20 ، 273-297. [ Google Scholar ] [ CrossRef ]
- دوو، ز. وانگ، دبلیو. وانگ، اچ. روش تشخیص گرداب در مقیاس متوسط اقیانوسی بر اساس یادگیری عمیق. Remote Sens. 2019 ، 11 ، 1921. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- چلتون، دی.بی. Schlax، MG; ساملسون، RM مشاهدات جهانی گردابهای غیرخطی میان مقیاس. Prog. اقیانوسگر. 2011 ، 91 ، 167-216. [ Google Scholar ] [ CrossRef ]
- دو، ی. آهنگ، دبلیو. او، س. هوانگ، دی. لیوتا، ا. Su, C. یادگیری عمیق با ترکیب ویژگی چند مقیاسی در سنجش از دور برای تشخیص گردابی اقیانوسی خودکار. Inf. فیوژن 2019 ، 49 ، 89-99. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Lguensat، R.; سان، م. فابلت، آر. تاندئو، پ. میسون، ای. Chen, G. EddyNet: یک شبکه عصبی عمیق برای طبقهبندی پیکسلی گردابهای اقیانوسی. در مجموعه مقالات IGARSS 2018-2018 IEEE بین المللی زمین شناسی و سمپوزیوم سنجش از دور، والنسیا، اسپانیا، 22 تا 27 ژوئیه 2018؛ IEEE: Silver Spring, MD, USA, 2018; صفحات 1764-1767. [ Google Scholar ]
- لیو، اف. ژو، اچ. Wen, B. DEDNet: تشخیص و مکان یابی گردابی فراساحلی با رادار HF توسط Deep Learning. Sensors 2021 , 21 , 126. [ Google Scholar ] [ CrossRef ]
- خو، جی. چنگ، سی. یانگ، دبلیو. زی، دبلیو. کنگ، ال. هنگ، آر. ما، اف. دونگ، سی. Yang, J. Oceanic Eddy Identification با استفاده از یک طرح هوش مصنوعی. Remote Sens. 2019 , 11 , 1349. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- خو، جی. زی، دبلیو. دونگ، سی. گائو، X. کاربرد سه طرح یادگیری عمیق در تشخیص گرداب اقیانوسی. جلو. مارس Sci. 2021 ، 8 ، 715. [ Google Scholar ] [ CrossRef ]
- او، ک. ژانگ، ایکس. رن، اس. Sun، J. هرم فضایی ادغام در شبکه های کانولوشن عمیق برای تشخیص بصری. IEEE Trans. الگوی مقعدی ماخ هوشمند 2015 ، 37 ، 1904-1916. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- Li، W. GeoAI: جایی که یادگیری ماشین و داده های بزرگ در علم GIS همگرا می شوند. جی. اسپات. Inf. علمی 2020 ، 20 ، 71-77. [ Google Scholar ] [ CrossRef ]
- هاگناور، جی. Helbich، M. یک شبکه عصبی مصنوعی با وزن جغرافیایی. بین المللی جی. جئوگر. Inf. علمی 2021 ، 36 ، 215-235. [ Google Scholar ] [ CrossRef ]
- Fotheringham، AS; Sachdeva، M. در مورد اهمیت تفکر محلی برای آمار و جامعه. تف کردن آمار 2022 ، 50 ، 100601. [ Google Scholar ] [ CrossRef ]
- Goodchild، MF; ژانل، مدیرکل به سمت تفکر فضایی انتقادی در علوم اجتماعی و علوم انسانی. GeoJournal 2010 ، 75 ، 3-13. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هو، ی. گائو، اس. لونگا، دی. لی، دبلیو. نیوزام، س. Bhaduri، B. GeoAI در ACM SIGSPATIAL: پیشرفت، چالشها و مسیرهای آینده. Sigspatial Spec. 2019 ، 11 ، 5-15. [ Google Scholar ] [ CrossRef ]
- Hsu، C.-Y.; لی، دبلیو. وانگ، اس. GeoAI دانش محور: ادغام دانش فضایی در یادگیری عمیق چند مقیاسی برای تشخیص دهانه مریخ. Remote Sens. 2021 , 13 , 2116. [ Google Scholar ] [ CrossRef ]
- Goodchild، MF; Li, W. همانندسازی در فضا و زمان باید در علوم اجتماعی و محیطی ضعیف باشد. Proc. Natl. آکادمی علمی ایالات متحده آمریکا 2021 ، 118 , e2015759118. [ Google Scholar ] [ CrossRef ]
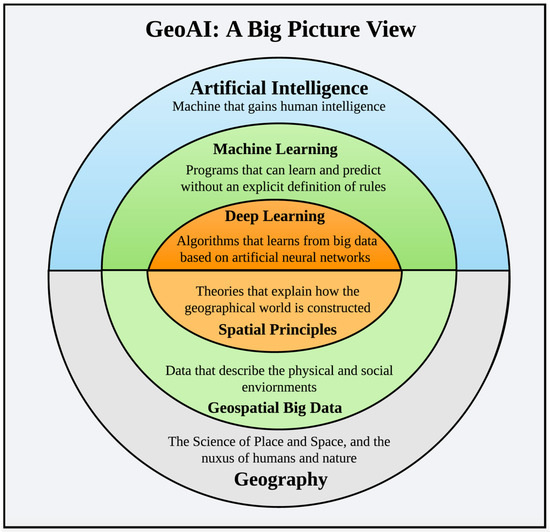
شکل 1. نمای بزرگی از GeoAI.
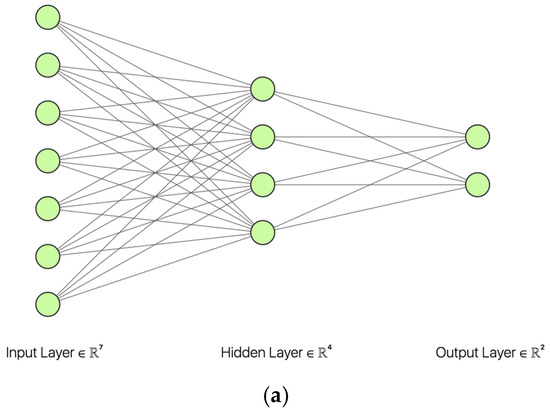
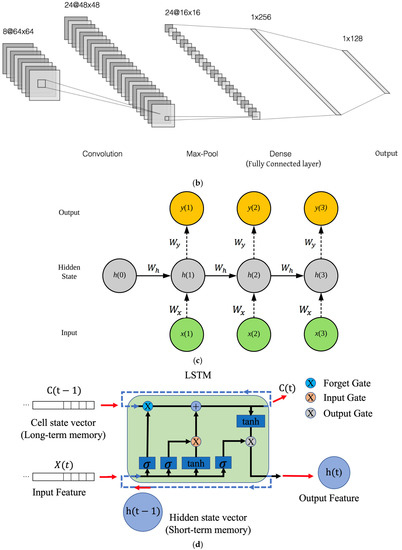
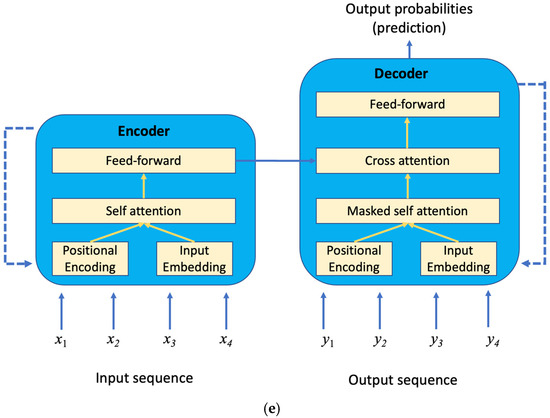
شکل 2. مدل های محبوب یادگیری عمیق. ( الف ) یک شبکه عصبی مصنوعی پیشخور، با سه لایه کاملاً متصل: لایه ورودی با 7 گره، لایه پنهان با 4 گره و لایه خروجی با 2 گره، برای طبقهبندی باینری. ( ب ) CNN 2 بعدی با 1 لایه کانولوشن، 1 لایه max-pooling، 1 لایه کاملا متصل و 1 لایه خروجی که دارای 128 گره خروجی است که قادر به طبقه بندی تصاویر از 128 کلاس است. برچسبهای بالای هر نقشه ویژگی، مانند 8@64×64 ، به تعداد فیلترهای پیچشی (8) و ابعاد نقشه ویژگی در جهتهای x و y (64 در هر طرف) اشاره دارد. ( ج ) نمونه ای از RNN. x ( i )ایکسمنبه معنی منهفتممنهفتمورودی در سری داده ها y( من )�منخروجی است. h ( من )ساعتمنیک حالت پنهان است دبلیوساعتدبلیوساعتو دبلیوایکسدبلیوایکسوزن هایی هستند که برای ورودی در آن اعمال می شوند x ( i )ایکسمنو h ( i – 1 )ساعتمن-1به ترتیب استخراج کردن h ( من )ساعتمن. دبلیوyدبلیو�وزن اعمال شده است h ( من )ساعتمنبه نتیجه رسیدن y( من )�من. دبلیوساعت دبلیوساعت، دبلیوایکسدبلیوایکس، و دبلیوyو دبلیو�وزن هایی هستند که در همه حالت های تکرار شونده مشترک هستند. ( د ) نمونه ای از LSTM با دروازه فراموشی. سی( تی )سیتیبه بردار حالت سلولی اشاره دارد که حافظه طولانی مدت را حفظ می کند. h ( t ) ∈( – 1 ، 1 )ساعتساعتتی∈-1،1ساعتبردار حالت پنهان است. هنگامی که مدل آموزش را به پایان می رساند، به عنوان ویژگی خروجی نیز شناخته می شود. ایکس⇀ایکس⇀بردار ویژگی ورودی و هر عنصر است ایکس( تی )ایکستیورودی (اطلاعات جدید) در زمان است تیتی. tanh به تابع مماس هذلولی اشاره دارد. ( ه ) یک معماری مدل ترانسفورماتور برای یادگیری ترتیب به ترتیب.


10 نظرات