

کلید واژه ها:
پیش بینی مسیر ; مکانیسم های توجه مکانی-زمانی ؛ رانندگی مستقل ؛ LSTM
1. مقدمه
-
ما از مکانیزم توجه فضایی برای اندازه گیری روابط فضایی وسایل نقلیه مجاور و به دست آوردن ویژگی فضایی جهانی وسیله نقلیه هدف استفاده می کنیم.
-
ما یک مکانیسم توجه زمانی را برای تخصیص وزنهای مختلف به خروجیهای رمزگذار معرفی میکنیم، که میتواند تأثیرات نسبی لحظات مختلف تاریخی را بر پیشبینی مسیر آینده ثبت کند.
-
ویژگی حرکت با استفاده از اطلاعات سرعت و شتاب استخراج می شود. در همین حال، ما آن را با ویژگیهای فضایی محلی و جهانی در یک نمایش ویژگی جامع از وسیله نقلیه هدف تجمیع میکنیم.
-
آزمایشهای گسترده روی مجموعه دادههای NGSIM نشان میدهد که مدل ما میتواند دقت پیشبینی مسیر خودرو را بهبود بخشد و به عملکرد پیشرفتهای در متریک RMSE دست یابد.
2. آثار مرتبط
2.1. روشهای کلاسیک برای پیشبینی مسیر
2.2. روشهای مبتنی بر LSTM برای پیشبینی مسیر
2.3. روشهای مبتنی بر توجه برای پیشبینی مسیر
3. روش ها
3.1. تعریف مشکل
مسیرهای گذشته i- امین وسیله نقلیه از زمان t = 1�=1به t =تیo b s�=����را می توان توسط
جایی که،
بردار حالت وسیله نقلیه i در مرحله زمانی t است که شامل مختصات موقعیت است (ایکستیمن،yتیمن)(���,���)، سرعت vتیمن���، و شتاب آتیمن���.
مسیرهای آینده وسیله نقلیه i را می توان به صورت بیان کرد
جایی که
مختصات پیش بینی شده وسیله نقلیه i در مرحله زمانی استتی˜=تیo b s+ 1 ،تیo b s+ 2 ، . . .تیo b s+تیp r e d�˜=����+1,����+2,…����+�����، تیp r e d�����طول زمانی مسیرهای وسیله نقلیه در آینده است.
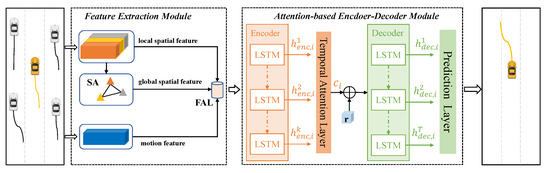
3.2. مدل کلی
3.3. ماژول استخراج ویژگی
ابتدا مختصات مکان را جاسازی می کنیم (ایکستیمن،yتیمن)(���,���)وارد فضایی با ابعاد بالا توسط:
جایی که Γ ( ⋅ )�(·)تابع جاسازی با است L e a k yR e l u���������غیر خطی بودن، دبلیوه∈آر2 ×D1��∈�2×�1ماتریس وزن این تابع است و D1�1ابعاد این ویژگی است. هتیمن���نشان دهنده ویژگی فضایی محلی i -امین وسیله نقلیه در مرحله زمانی t است.
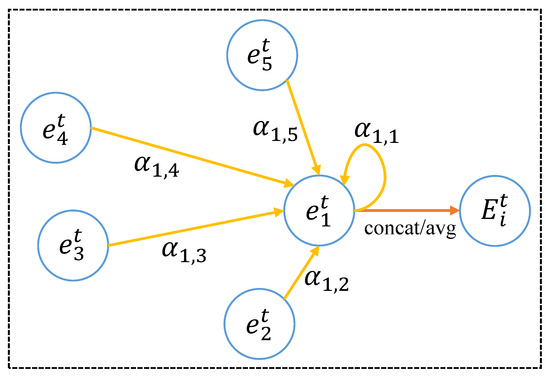
همانطور که در شکل 2 نشان داده شده است ، ما این ویژگی های فضایی محلی را در نظر می گیریم {هتی1،هتی2, … ,هتیn}{�1�,�2�,…,���}به عنوان ورودی این لایه، جایی که n تعداد وسایل نقلیه است. سپس وزن توجه را محاسبه می کنیم αتیمن ، ج��,��برای نشان دادن اهمیت نسبی جفت وسیله نقلیه ( من ، ج )(�,�)به شرح زیر است:
که در آن ⨁ عملیات الحاق را نشان می دهد. Wس��پارامتر وزن است که ویژگی فضایی محلی را تغییر می دهد هتیj���به فضایی با ابعاد بالا آتی��بردار وزن یک شبکه پیشخور منفرد است که برای محاسبه ضرایب توجه استفاده خواهد شد. L e a k yR e l u���������یک تابع فعال سازی غیر خطی است و شیب ورودی منفی آن 0.1 تنظیم شده است. e x p���نشان دهنده تابع نمایی است که هدایت می کند s o ft m a x�������عادی سازی
پس از به دست آوردن ضرایب توجه، می توانیم آنها را با ویژگی های فضایی محلی برای محاسبه ادغام کنیم Eتیمن���، که به معنای ویژگی فضایی جهانی وسیله نقلیه i در مرحله زمانی t است. توسط:
جایی که ϕ ( ⋅ )�(·)یک تابع فعال سازی غیر خطی است.
ثانیا، ادبیات [ 44 ] گزارش کرده است که پویایی نسبی نیز برای نشان دادن اثرات اجتماعی وسایل نقلیه در صحنه های رانندگی با سرعت بالا مهم است. علاوه بر این، ما معتقدیم که هر وسیله نقلیه رفتارهای خود را (به عنوان مثال، شتاب یا کاهش سرعت، تغییر جهت) با توجه به فعل و انفعالات فضایی جهانی، که شامل تأثیرات مختلف وسایل نقلیه اطراف بر روی عملکرد بعدی خود است، تنظیم می کند. بنابراین، ویژگی حرکت را استخراج کردیم مترتیمن���وسیله نقلیه مورد نظر با استفاده از اطلاعات سرعت و شتاب.
جایی که Θ ( ⋅ )�(·)یک شبکه کاملا متصل است، دبلیومتر∈آر2 ×D2��∈�2×�2پارامتر شبکه است و D2�2بعد فضای ویژگی حرکت است.
در نهایت، ویژگی فضایی جهانی و ویژگی حرکت به عنوان ورودی های لایه تجمع ویژگی تعریف می شوند. در این میان ویژگی فضایی محلی یکی دیگر از ورودی هاست که خروجی این لایه را قادر می سازد اطلاعات محلی را در بر بگیرد. نمایش ویژگی تجمیع شده zتیمن���وسیله نقلیه i در گام تاریخی t به عنوان معادله ( 9 ) توصیف می شود.
که در آن ⨀ نشان دهنده ضرب عنصر است.
3.4. ماژول رمزگذار – رمزگشا مبتنی بر توجه
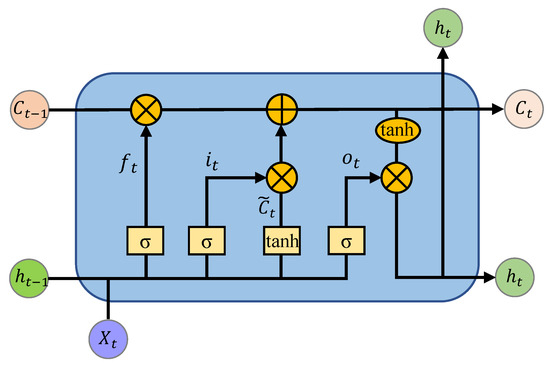
در این مقاله، ما یک شبکه LSTM را به عنوان استخراج کننده ویژگی ماژول رمزگذار-رمزگشا انتخاب می کنیم. همانطور که در شکل 3 نشان داده شده است ، حالت پنهان h توسط دروازه فراموشی f ، دروازه ورودی i ، دروازه خروجی o و حالت سلول c کنترل می شود. عملکرد سلول LSTM را می توان به صورت زیر بیان کرد:
جایی که ایکستی��بردار ورودی است و دبلیو∗�*و ب∗�*به ترتیب ماتریس وزن و بردار بایاس را نشان می دهند. σ(⋅)�(·)هست sigmoid�������عملکرد فعال سازی
3.4.1. ماژول رمزگذار
رمزگذار LSTM ویژگی تجمیع شده را می گیرد ztمن���وسیله نقلیه i در مرحله زمانی t به عنوان ورودی و آن را به نمایش حالت پنهان این رمزگذار تبدیل می کند ساعتتیi , e n cℎ�,���تی. می توان آن را به صورت زیر تعریف کرد:
جایی که دبلیوe n c∈آر(D1+D2) ×De n cدبلیوه�ج∈آر(�1+�2)×�ه�جماتریس وزن این شبکه LSTM است و بین تمام وسایل نقلیه مشترک است و De n c�ه�جبعد شبکه LSTM است.
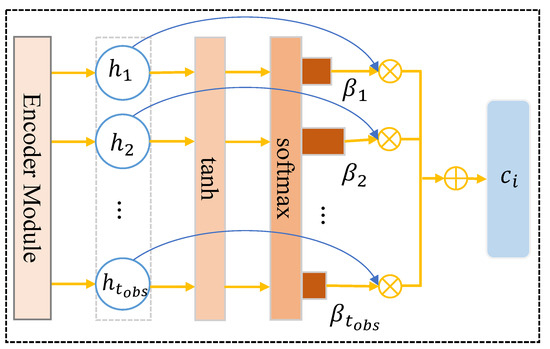
3.4.2. لایه توجه زمانی
ابتدا استفاده می کنیم اچمناچمنبرای نشان دادن دنباله های بافت زمانی وسیله نقلیه i ، که می تواند به شرح زیر باشد
جایی که ساعتتیi , e n cساعتمن،ه�جتیبا معادله ( 15 ) به دست می آید که نشان دهنده حالت پنهان وسیله نقلیه i در مرحله زمانی t است.
سپس، همانطور که در شکل 4 نشان داده شده است ، می گیریم اچمناچمنبه عنوان ورودی لایه توجه زمانی و بردار وزن توجه را محاسبه کنید βمن�منبه شرح زیر است:
جایی که ⋅تی·تیبه معنی جابجایی، t a n hتیآ�ساعتیک تابع فعال سازی است و دبلیوتیدبلیوتیماتریس وزن است. بردار وزن βمن�منشامل اثرات مختلف اطلاعات تاریخی از بعد زمانی است و این وزن های محاسبه شده به دلیل s o ft m a xس��تیمترآایکسعملکرد.
در نهایت، بردار بافت زمانی وزنی جمنجمنوسیله نقلیه من می توانم محاسبه کنم
3.4.3. ماژول رمزگشا
رمزگشا LSTM و لایه پیش بینی برای تولید مسیرهای آینده وسیله نقلیه مورد نظر اعمال می شوند. در مرحله اول، رمزگشا بردار زمینه زمانی را به هم متصل می کند جمنجمنو یک نویز تصادفی r ، که می تواند استحکام پیش بینی مسیر را افزایش دهد. لایه پیش بینی از حالت پنهان استفاده می کند ساعتتی˜من ، دe cساعتمن،دهجتی˜از این رمزگشا برای تولید مختصات پیش بینی شده oتی˜من�منتی˜وسیله نقلیه i در مرحله زمانی تی˜تی˜. سپس، نتایج oتی˜من�منتی˜آخرین مرحله زمانی برای تولید نتایج پیشبینی به این رمزگشا وارد میشود oتی˜+ 1من�منتی˜+1.
جایی که دبلیودe c∈آر(De n c+Dr) ×Dدe cدبلیودهج∈آر(�ه�ج+��)×�دهجپارامترهای آموخته شده هستند و Dدe c�دهجابعاد این شبکه LSTM است، Ψ ( ⋅ )�(·)یک شبکه کاملا متصل است و دبلیوo∈آرDدe c× 2دبلیو�∈آر�دهج×2ماتریس وزن این شبکه است.
3.5. عملکرد از دست دادن
در این مقاله از کوچکترین مقدار فاصله بین مختصات پیش بینی شده استفاده می کنیم oتیمن ، p r e d�من،پ�هدتیو مختصات را مشاهده کرد oتیمن ، t r u e�من،تی�توهتیوسیله نقلیه i در مرحله زمانی t برای محاسبه تلفات. تابع ضرر برای آموزش را می توان به صورت زیر نوشت:
که در آن N اندازه مجموعه قطارها است. تی=تیp r e dتی=تیپ�هدطول مسیر آینده است.
4. آزمایش ها و نتایج
4.1. مجموعه داده ها
4.2. معیارهای
در این مقاله، ریشه میانگین مربعات خطا (RMSE) را به عنوان معیاری برای ارزیابی عملکرد پیشبینی مدل STAM-LSTM انتخاب میکنیم. هرچه مقدار RMSE کوچکتر باشد، فاصله بین مسیر پیش بینی شده و مسیر حقیقت زمین کمتر است. RMSE به صورت محاسبه می شود
که در آن M به معنای تعداد کل مجموعه داده های آزمایشی است. ( ایکستیمن،yتیمنایکسمنتی،�منتی) و ( ایکس˜تیمن،y˜تیمنایکس˜منتی،�˜منتی) به ترتیب مختصات حقیقت زمین و مختصات پیش بینی شده وسیله نقلیه i در مرحله زمانی t هستند. T افق پیش بینی است و در آزمایش ما از 1 تا 5 متغیر است.
4.3. جزئیات پیاده سازی
4.4. مطالعه ابلیشن
4.5. خطوط پایه
-
سرعت ثابت (CV) [ 1 ] : این مدل از فیلتر کالمن با سرعت ثابت برای پیش بینی مسیر قطعی هر وسیله نقلیه استفاده می کند.
-
Vanilla-LSTM (V-LSTM): این مدل بر اساس مدل رمزگذار-رمزگشا LSTM است که فقط از مسیرهای گذشته وسیله نقلیه مورد نظر برای پیش بینی مسیرهای آینده استفاده می کند.
-
Maneuver-LSTM (M-LSTM) [ 28 ]: این مدل از رمزگذار برای رمزگذاری مسیرهای تاریخی وسیله نقلیه هدف و همسایگان آن استفاده می کند و رمزگشا پیش بینی های مسیر چندوجهی را با توجه به خروجی رمزگذار و مانور تولید می کند. بردار رمزگذاری
-
Social-LSTM (S-LSTM) [ 11 ]: این مدل از شبکه کاملاً متصل به عنوان لایه ادغام اجتماعی برای به اشتراک گذاری اطلاعات استفاده می کند و مسیر آینده تک وجهی را تولید می کند.
-
Convolutional Social LSTM (CS-LSTM) [ 12 ]: این مدل از ادغام اجتماعی کانولوشنی برای به تصویر کشیدن تعاملات فضایی استفاده می کند، و ماژول رمزگذار-رمزگشا برای تولید توزیع های مسیر چندوجهی وسایل نقلیه استفاده می شود.
-
همجوشی تانسور چند عاملی (MATF) [ 10 ]: این مدل یک تانسور چند عاملی را استخراج می کند که شامل زمینه صحنه و مسیرهای تاریخی چندین وسیله نقلیه است. سپس، شبکه GAN برای پیش بینی مسیرهای آینده عوامل استفاده می شود.
-
توجه چند سر LSTM (MHA-LSTM) [ 14 ]: این مدل مکانیسم توجه چند سر را برای ثبت تعاملات مکانی-زمانی با مرتبه بالا اعمال می کند.
-
MHA-LSTM(+f): این مدل اطلاعات سرعت، شتاب و کلاس را به عنوان ویژگی های اضافی بر اساس مدل MHA-LSTM می گیرد.
4.6. آنالیز کمی
-
مکانیسم توجه فضایی میتواند تعاملات فضایی بهتری بین وسایل نقلیه همسایه استخراج کند، و مکانیسم مبتنی بر نمودار برای گرفتن رابطه اجتماعی در پیشبینی مسیر وسیله نقلیه مناسب است.
-
مکانیسم توجه زمانی میتواند تأثیرات مختلف مراحل زمانی مختلف را بهطور مؤثری ثبت کند و وزن مناسبی را به نمایش ویژگی مربوطه که توسط رمزگذار آموخته شده است، اختصاص دهد. بنابراین، رمزگشا میتواند از اطلاعات ارزشمندتری برای تولید مسیرهای آینده وسایل نقلیه، بهویژه در پیشبینی مسیر بلندمدت استفاده کند.
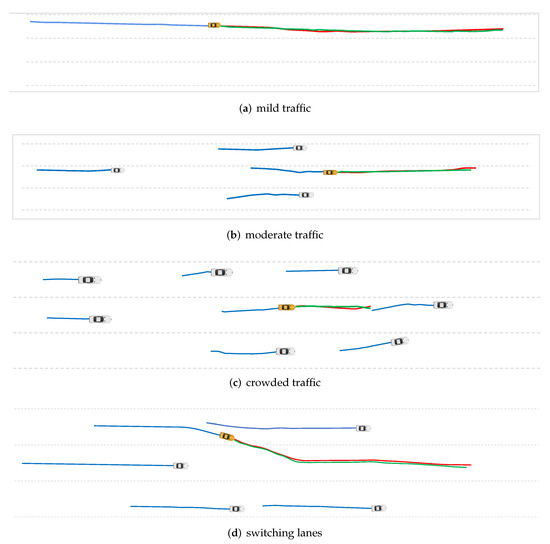
4.7. تحلیل کیفی
5. نتیجه گیری ها
منابع
- اشنایدر، ن. Gavrila، DM پیشبینی مسیر عابر پیاده با فیلترهای بیزی بازگشتی: یک مطالعه تطبیقی. در مجموعه مقالات کنفرانس آلمان در مورد شناسایی الگوها، زاربروکن، آلمان، 3-6 سپتامبر 2013. صص 174-183. [ Google Scholar ]
- الناگر، ع. پیش بینی اجسام متحرک در محیط های پویا با استفاده از فیلترهای کالمن. در مجموعه مقالات سمپوزیوم بین المللی IEEE در سال 2001 در مورد هوش محاسباتی در رباتیک و اتوماسیون (شماره گربه 01EX515)، Banff، AB، کانادا، 29 ژوئیه تا 1 اوت 2001. صص 414-419. [ Google Scholar ]
- دیو، ن. رنگش، ع. Trivedi، MM وسایل نقلیه اطراف چگونه حرکت می کنند؟ یک چارچوب یکپارچه برای طبقه بندی مانور و پیش بینی حرکت IEEE Trans. هوشمند وه 2018 ، 3 ، 129-140. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یون، اس. Kum, D. رویکرد پرسپترون چند لایه برای پیشبینی حرکت جانبی وسایل نقلیه اطراف برای وسایل نقلیه خودمختار. در مجموعه مقالات سمپوزیوم وسایل نقلیه هوشمند IEEE 2016 (IV)، گوتنبرگ، سوئد، 19 تا 22 ژوئن 2016؛ ص 1307–1312. [ Google Scholar ]
- تران، کیو. فرل، جی. تشخیص مانور آنلاین و پیشبینی مسیر چندوجهی برای کمک تقاطع با استفاده از رگرسیون ناپارامتریک. در مجموعه مقالات سمپوزیوم وسایل نقلیه هوشمند IEEE 2014، دیربورن، MI، ایالات متحده آمریکا، 8 تا 11 ژوئن 2014. ص 918-923. [ Google Scholar ]
- ویلیامز، CK; راسموسن، فرآیندهای گاوسی CE برای یادگیری ماشینی ؛ مطبوعات MIT: کمبریج، MA، ایالات متحده آمریکا، 2006; جلد 2. [ Google Scholar ]
- هوکرایتر، اس. Schmidhuber, J. حافظه کوتاه مدت طولانی. محاسبات عصبی 1997 ، 9 ، 1735-1780. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- تانگ، جی. شو، ایکس. یان، آر. Zhang، L. گراف LSTM محدود برای شناسایی فعالیت گروهی. IEEE Trans. الگوی مقعدی ماخ هوشمند 2019 ، 44 ، 636-647. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- شو، اچ. Huynh، DQ; رینولدز، ام. SS-LSTM: یک مدل LSTM سلسله مراتبی برای پیش بینی مسیر عابر پیاده. در مجموعه مقالات کنفرانس زمستانی IEEE 2018 در مورد کاربردهای بینایی کامپیوتری (WACV)، دریاچه تاهو، NV، ایالات متحده، 12 تا 15 مارس 2018؛ صص 1186–1194. [ Google Scholar ]
- ژائو، تی. خو، ی. مونفورت، ام. چوی، دبلیو. بیکر، سی. ژائو، ی. وانگ، ی. وو، YN ترکیب تانسور چند عاملی برای پیشبینی مسیر متنی. در مجموعه مقالات کنفرانس IEEE/CVF در مورد دید کامپیوتری و تشخیص الگو، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 16 تا 17 ژوئن 2019؛ ص 12126–12134. [ Google Scholar ]
- الهی، ع. گوئل، ک. راماناتان، وی. Robicquet، A. فی فی، ال. Savarese, S. Social lstm: پیش بینی مسیر انسان در فضاهای شلوغ. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، لاس وگاس، NV، ایالات متحده آمریکا، 27-30 ژوئن 2016. ص 961-971. [ Google Scholar ]
- دیو، ن. Trivedi، MM گردآوری اجتماعی کانولوشن برای پیشبینی مسیر خودرو. در مجموعه مقالات کنفرانس IEEE در کارگاه های آموزشی بینایی کامپیوتری و تشخیص الگو، سالت لیک سیتی، UT، ایالات متحده آمریکا، 18 تا 23 ژوئن 2018؛ ص 1468-1476. [ Google Scholar ]
- مسعود، ک. یحیوی، آی. وروست-بلندت، ا. نشاشیبی، ف. تجمیع اجتماعی غیر محلی برای پیشبینی مسیر خودرو. در مجموعه مقالات سمپوزیوم وسایل نقلیه هوشمند IEEE 2019 (IV)، پاریس، فرانسه، 9 تا 12 ژوئن 2019؛ ص 975-980. [ Google Scholar ]
- مسعود، ک. یحیوی، آی. وروست-بلندت، ا. نشاشیبی، ف. پیش بینی مسیر وسیله نقلیه مبتنی بر توجه. IEEE Trans. هوشمند وه 2020 ، 6 ، 175-185. [ Google Scholar ] [ CrossRef ]
- پنگ، ی. ژانگ، جی. شی، ج. خو، بی. ژنگ، L. SRAI-LSTM: یک LSTM مبتنی بر توجه مبتنی بر تعامل برای پیشبینی مسیر انسانی. محاسبات عصبی 2021 ، 490 ، 258-268. [ Google Scholar ] [ CrossRef ]
- لفور، اس. واسکز، دی. Laugier, C. نظرسنجی در مورد پیشبینی حرکت و ارزیابی ریسک برای وسایل نقلیه هوشمند. ROBOMECH J. 2014 ، 1 ، 1. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- فرل، جی. استوبینگ، اچ. Huss, SA; استیلر، سی. ارزیابی مانور پیشبینیکننده برای افزایش دادههای تحرک خودرو به x. در مجموعه مقالات سمپوزیوم وسایل نقلیه هوشمند IEEE 2012، مادرید، اسپانیا، 3 تا 7 ژوئن 2012. صص 558-564. [ Google Scholar ]
- شرایر، ام. ویلرت، وی. آدامی، جی بیزیان، پیشبینی مسیر بلندمدت و ارزیابی بحرانی برای سیستمهای کمک راننده مبتنی بر مانور. در مجموعه مقالات هفدهمین کنفرانس بین المللی ieee در مورد سیستم های حمل و نقل هوشمند (ITSC)، چینگدائو، چین، 8 تا 11 اکتبر 2014. صص 334-341. [ Google Scholar ]
- Aoude، GS; Desaraju، VR; استفنز، LH; چگونه، طبقه بندی رفتار راننده JP در تقاطع ها و اعتبار سنجی در مجموعه داده های طبیعی بزرگ. IEEE Trans. هوشمند ترانسپ سیستم 2012 ، 13 ، 724-736. [ Google Scholar ] [ CrossRef ]
- هوئنو، ا. بونیفیت، پ. شرفاوی، وی. Yao, W. پیشبینی مسیر وسیله نقلیه بر اساس مدل حرکت و تشخیص مانور. در مجموعه مقالات کنفرانس بین المللی IEEE/RSJ 2013 در مورد ربات ها و سیستم های هوشمند، توکیو، ژاپن، 3 تا 7 نوامبر 2013. صص 4363-4369. [ Google Scholar ]
- Pineda، FJ تعمیم انتشار پسانداز به شبکههای عصبی مکرر. فیزیک کشیش لِت 1987 , 59 , 2229. [ Google Scholar ] [ CrossRef ]
- پاسکانو، آر. میکولوف، تی. Bengio، Y. در مورد دشواری آموزش شبکه های عصبی بازگشتی. در مجموعه مقالات کنفرانس بین المللی یادگیری ماشین، آتلانتا، GA، ایالات متحده آمریکا، 17-19 ژوئن 2013. ص 1310–1318. [ Google Scholar ]
- دوناهو، جی. آن هندریکس، ال. گواداراما، اس. رورباخ، م. ونوگوپالان، اس. سانکو، ک. دارل، تی. شبکه های کانولوشنال مکرر طولانی مدت برای تشخیص و توصیف بصری. در مجموعه مقالات کنفرانس IEEE در مورد بینایی کامپیوتری و تشخیص الگو، بوستون، MA، ایالات متحده آمریکا، 7 تا 12 ژوئن 2015. صص 2625–2634. [ Google Scholar ]
- یائو، اچ. تانگ، ایکس. وی، اچ. ژنگ، جی. لی، زی. بازبینی شباهت مکانی-زمانی: یک چارچوب یادگیری عمیق برای پیشبینی ترافیک. در مجموعه مقالات کنفرانس AAAI در مورد هوش مصنوعی، هونولولو، HI، ایالات متحده، 27 ژانویه تا 1 فوریه 2019؛ جلد 33، ص 5668–5675. [ Google Scholar ]
- پارک، SH; کیم، بی. کانگ، سی ام. چانگ، سی سی; Choi، JW پیش بینی ترتیب به دنباله مسیر وسیله نقلیه از طریق معماری رمزگذار-رمزگشا LSTM. در مجموعه مقالات سمپوزیوم وسایل نقلیه هوشمند IEEE 2018 (IV)، چانگشو، چین، 26 تا 30 ژوئن 2018؛ صفحات 1672-1678. [ Google Scholar ]
- ژائو، ایکس. چن، ی. گوا، جی. ژائو، دی. یک مدل توجه مکانی-زمانی برای پیشبینی مسیر انسان. IEEE CAA J. Autom. گناه 2020 ، 7 ، 965-974. [ Google Scholar ] [ CrossRef ]
- آلچه، اف. de La Fortelle، A. یک شبکه LSTM برای پیشبینی مسیر بزرگراه. در مجموعه مقالات بیستمین کنفرانس بین المللی IEEE 2017 در مورد سیستم های حمل و نقل هوشمند (ITSC)، یوکوهاما، ژاپن، 16 تا 19 اکتبر 2017؛ صص 353-359. [ Google Scholar ]
- دیو، ن. Trivedi، MM پیشبینی مسیر چندوجهی وسایل نقلیه اطراف با lstms مبتنی بر مانور. در مجموعه مقالات سمپوزیوم وسایل نقلیه هوشمند IEEE 2018 (IV)، چانگشو، چین، 26 تا 30 ژوئن 2018؛ صص 1179–1184. [ Google Scholar ]
- بهداناو، د. چو، ک. Bengio، Y. ترجمه ماشینی عصبی با یادگیری مشترک تراز و ترجمه. arXiv 2014 ، arXiv:1409.0473. [ Google Scholar ]
- گرگور، ک. دانیهلکا، آی. گریوز، ا. رزنده، دی. Wierstra, D. Draw: یک شبکه عصبی بازگشتی برای تولید تصویر. در مجموعه مقالات کنفرانس بین المللی یادگیری ماشین، لیل، فرانسه، 7 تا 9 ژوئیه 2015. ص 1462-1471. [ Google Scholar ]
- ژو، جی. زو، ایکس. آهنگ، سی. فن، ی. زو، اچ. ما، ایکس. یان، ی. جین، جی. لی، اچ. Gai, K. شبکه بهره عمیق برای پیشبینی نرخ کلیک. در مجموعه مقالات بیست و چهارمین کنفرانس بین المللی ACM SIGKDD در زمینه کشف دانش و داده کاوی، لندن، بریتانیا، 19 تا 23 اوت 2018؛ صص 1059-1068. [ Google Scholar ]
- شیائو، ی. یین، اچ. ژانگ، ی. چی، اچ. ژانگ، ی. Liu, Z. یک شبکه Conv-LSTM مبتنی بر توجه دو مرحله ای برای همبستگی مکانی-زمانی و پیش بینی سری های زمانی چند متغیره. بین المللی جی. اینتل. سیستم 2021 ، 36 ، 2036–2057. [ Google Scholar ] [ CrossRef ]
- چن، ک. آهنگ، X. رن، ایکس. مدلسازی تعامل اجتماعی و قصد برای پیشبینی مسیر عابر پیاده. فیزیک آمار مکانیک. Appl. 2021 , 570 , 125790. [ Google Scholar ] [ CrossRef ]
- وانگ، آر. کوی، ی. آهنگ، X. چن، ک. Fang, H. شبکه عصبی کانولوشن مبتنی بر چند اطلاعات با مکانیسم توجه برای پیشبینی مسیر عابر پیاده. تصویر Vis. محاسبه کنید. 2021 ، 107 ، 104110. [ Google Scholar ] [ CrossRef ]
- واسوانی، ع. Shazeer, N. پارمار، ن. Uszkoreit، J. جونز، ال. گومز، AN; قیصر، Ł. Polosukhin، I. توجه شما تمام چیزی است که نیاز دارید. در مجموعه مقالات پیشرفتها در سیستمهای پردازش اطلاعات عصبی، لانگ بیچ، کالیفرنیا، ایالات متحده آمریکا، 4 تا 9 دسامبر 2017؛ صفحات 5998–6008. [ Google Scholar ]
- وو، ی. چن، جی. لی، ز. ژانگ، ال. شیونگ، ال. لیو، ز. Knoll، A. HSTA: یک مدل توجه مکانی-زمانی سلسله مراتبی برای پیشبینی مسیر. IEEE Trans. وه تکنولوژی 2021 ، 70 ، 11295-11307. [ Google Scholar ] [ CrossRef ]
- Kipf، TN; Welling, M. طبقه بندی نیمه نظارت شده با شبکه های کانولوشن گراف. arXiv 2016 , arXiv:1609.02907. [ Google Scholar ]
- ولیچکوویچ، پ. کوکورول، جی. کازانووا، آ. رومرو، آ. لیو، پی. Bengio، Y. گراف شبکه های توجه. arXiv 2017 , arXiv:1710.10903. [ Google Scholar ]
- خو، ی. رن، دی. لی، ام. چن، ی. فن، م. شیا، اچ. ربات IEEE. خودکار Lett. 2021 ، 6 ، 1574-1581. [ Google Scholar ] [ CrossRef ]
- یانگ، جی. سان، ایکس. وانگ، آر جی. Xue، LX PTPGC: پیشبینی مسیر عابر پیاده توسط شبکه توجه گراف با ConvLSTM. ربات. Auton. سیستم 2022 ، 148 ، 103931. [ Google Scholar ] [ CrossRef ]
- کوساراجو، وی. صادقیان، ع. مارتین-مارتین، آر. رید، آی. رضاتوفیقی، ش. Savarese, S. Social-bigat: پیش بینی مسیر چندوجهی با استفاده از شبکه های توجه دوچرخه و گراف. arXiv 2019 , arXiv:1907.03395. [ Google Scholar ]
- لین، ز. فنگ، ام. سانتوس، CND؛ یو، م. شیانگ، بی. ژو، بی. Bengio، Y. تعبیه جملات خودآگاهی ساختاریافته. arXiv 2017 , arXiv:1703.03130. [ Google Scholar ]
- چن، جی. چن، جی. لی، ز. وو، ی. نول، الف. شبکههای کانولوشنال گراف مبتنی بر توجه برای پیشبینی مسیر. در مجموعه مقالات ششمین کنفرانس بین المللی IEEE 2021 در مورد رباتیک و مکاترونیک پیشرفته (ICARM)، چونگ کینگ، چین، 3 تا 5 ژوئیه 2021؛ صص 852-857. [ Google Scholar ]
- دینگ، دبلیو. چن، جی. شن، اس. پیش بینی رفتارهای وسیله نقلیه در یک افق گسترده با استفاده از شبکه تعامل رفتار. در مجموعه مقالات کنفرانس بین المللی رباتیک و اتوماسیون 2019 (ICRA)، مونترال، QC، کانادا، 20 تا 24 مه 2019؛ صص 8634–8640. [ Google Scholar ]
- Kingma، DP; Ba, J. Adam: روشی برای بهینه سازی تصادفی. arXiv 2014 ، arXiv:1412.6980. [ Google Scholar ]


1 نظر