

Pathwalker: یک مدل حرکت مبتنی بر فردی جدید برای علم حفاظت و مدلسازی اتصال


1
موسسه ریاضی، دانشگاه آکسفورد، آکسفورد OX2 6GG، انگلستان
2
واحد تحقیقات حفاظت از حیات وحش (WildCRU)، گروه جانورشناسی، دانشگاه آکسفورد، آکسفورد OX13 5QL، انگلستان
3
خدمات جنگلی ایالات متحده، ایستگاه تحقیقاتی کوه راکی، فلگ استاف، AZ 86001، ایالات متحده آمریکا
*
نویسنده ای که مسئول است باید ذکر شود.
دریافت: 10 آوریل 2022/بازبینی شده: 18 مه 2022/پذیرش: 27 مه 2022/تاریخ انتشار: 30 مه 2022
چکیده
:
درک حرکت ارگانیسم در قلب بسیاری از رشته های اکولوژیکی قرار دارد. مطالعه اتصالات چشم انداز – میزانی که یک منظره حرکت ارگانیسم را تسهیل می کند – به کانون اصلی اکولوژی فضایی و علم حفاظت تبدیل شده است. چندین الگوریتم محاسباتی برای مدل سازی اتصال توسعه داده شده است. با این حال، مدلهای اصلی مورد استفاده امروزه به دلیل عدم انعطافپذیری و مفروضات سادهسازی رفتار حرکتی محدود شدهاند. در این مقاله، ما یک مدل جدید فضایی صریح، فردی و مبتنی بر فرآیند به نام Pathwalker را معرفی میکنیم که حرکت و اتصال ارگانیسم را از طریق مناظر ناهمگن به عنوان تابعی از مقاومت منظر، هزینه انرژی حرکت، خطر مرگ و میر، همبستگی خودکار، و سوگیری جهتی به سمت یک مقصد، همه در مقیاس های فضایی چندگانه. ما ساختار و پارامترهای مدل را توصیف میکنیم و ارزیابیهای آماری را برای نشان دادن تأثیر این پارامترها بر الگوهای حرکتی حاصل ارائه میکنیم. Pathwalker که در Python 3 نوشته شده است، برای هر نسخه از Python 3 کار می کند و به صورت رایگان برای دانلود آنلاین در دسترس است. Pathwalker حرکت و اتصال را با انعطافپذیری بیشتری در مقایسه با الگوریتمهای اتصال غالب موجود در علم حفاظت مدلسازی میکند، در نتیجه، پیشبینیهای دقیقتری را برای عملکرد و مدیریت حفاظت ممکن میسازد. علاوه بر این، Pathwalker یک چارچوب شبیهسازی بسیار توانمند برای کاوش سؤالات نظری و روششناختی ارائه میکند که نمیتوان تنها با دادههای تجربی به آن پرداخت. Pathwalker برای هر نسخه از پایتون 3 کار می کند و به صورت رایگان برای دانلود آنلاین در دسترس است. Pathwalker حرکت و اتصال را با انعطافپذیری بیشتری در مقایسه با الگوریتمهای اتصال غالب موجود در علم حفاظت مدلسازی میکند، در نتیجه، پیشبینیهای دقیقتری را برای عملکرد و مدیریت حفاظت ممکن میسازد. علاوه بر این، Pathwalker یک چارچوب شبیهسازی بسیار توانمند برای کاوش سؤالات نظری و روششناختی ارائه میکند که نمیتوان تنها با دادههای تجربی به آن پرداخت. Pathwalker برای هر نسخه از پایتون 3 کار می کند و به صورت رایگان برای دانلود آنلاین در دسترس است. Pathwalker حرکت و اتصال را با انعطافپذیری بیشتری در مقایسه با الگوریتمهای اتصال غالب موجود در علم حفاظت مدلسازی میکند، در نتیجه، پیشبینیهای دقیقتری را برای عملکرد و مدیریت حفاظت ممکن میسازد. علاوه بر این، Pathwalker یک چارچوب شبیهسازی بسیار توانمند برای کاوش سؤالات نظری و روششناختی ارائه میکند که نمیتوان تنها با دادههای تجربی به آن پرداخت.
کلید واژه ها:
اتصال ؛ حرکت ؛ شبیه سازی ; مبتنی بر فرد ؛ مبتنی بر فرآیند ؛ فضایی صریح مقاومت در برابر چشم انداز ؛ مدل سازی ; نرم افزار
1. مقدمه
-
- این انسان، مهمان خانه است.
- هر روز یک چیز جدید.
- یک شادی، یک افسردگی، یک پست،
- مقداری آگاهی لحظه ای می آید
- به عنوان یک بازدید کننده غیر منتظره
- به آنها خوشامد بگویید و سرشان را گرم کنید!…
- فکر تاریک، شرم، بدخواهی،
- آنها را دم در با خنده ملاقات کن،
- و آنها را به داخل دعوت کنید
- قدردان کسی باش که می آید،
- زیرا هر کدام ارسال شده است
- به عنوان یک راهنمای فراتر
جلال الدین رومی، ترجمه کلمن بارکس
حرکت ارگانیسم در دنیای زیبا و اسرارآمیز ما برای همه فرآیندهای اکولوژیکی اساسی است [ 1 ، 2 ]. در زمینه علم حفاظت، حرکت برای افراد ضروری است تا از منابع در محدوده خانه خود استفاده کنند و از محدوده خانه های مادرزادی به بزرگسالان پراکنده شوند. در جریان ژن و بیان رفتار و منش فردی نقش اساسی دارد. در مقیاسهای وسیعتر در فضا و زمان، نقش کلیدی در پویایی جمعیت ایفا میکند، زیرا جمعیتها را قادر میسازد تا محدوده جغرافیایی خود را در پاسخ به اختلالات و تغییرات در آب و هوا و کاربری زمین تغییر دهند [ 3 ، 4 ].
تأثیرات معمولاً مورد مطالعه بر روی رفتار حرکتی حیوانات شامل عوامل زنده و غیرزیست مانند دسترسی به منابع، توانایی جفت گیری و اجتناب از خطرات مرگ و میر [ 5 ] است – اگرچه زندگی و مسیرهای حیوانات آشکارا غنی تر و پیچیده تر از این موارد است. عوامل به تنهایی [ 6 ، 7 ]. چنین تأثیراتی به هیچ وجه ثابت یا ثابت نیستند. آنها در فضا و زمان سیال و پویا هستند [ 8 ] و در مقیاس های چندگانه مکانی-زمانی [ 9 ] متفاوت هستند. این فرآیندهای بیولوژیکی عمیقاً به تعاملات و روابط تک تک حیوانات با منظره ای که در آن زندگی می کنند بستگی دارد [ 10 ، 11 ].
1.1. اتصال چشم انداز
«ارتباط منظره» که معمولاً به عنوان میزانی تعریف میشود که یک منظره حرکت افراد یا گروههای بزرگتری از موجودات را تسهیل میکند [ 12 ]، یک پدیده پویا است که بر اساس انتخابهای حرکتی تجمعی افراد در فضا و زمان است. این یک روش مفید برای نقشهبرداری مسیرهای نوظهور حرکت حیوانات ارائه میکند، و تبدیل به کانون مرکزی اکولوژی فضایی و علم حفاظت شده است [ 13 ، 14 ]. مدلسازی اتصال معمولاً به دو جزء نیاز دارد: (1) یک “سطح مقاومت در منظره” و (2) یک الگوریتم که از این سطح مقاومت برای پیشبینی اتصال استفاده میکند [ 15 ].
1.1.1. سطوح مقاومتی
مدلهای اتصال غالبی که امروزه مورد استفاده قرار میگیرند، مبتنی بر سطوح مقاومت هستند، که در آن تعاملات بین حرکت حیوانات و ساختار چشمانداز به یک رابطه هزینه-فایده عوامل فشار و کشش کاهش مییابد. به طور خاص، یک سطح مقاومت، یک نقشه پیکسلی از چشم انداز است که در آن به هر پیکسل یک مقدار عددی اختصاص داده می شود. این مقدار «هزینه جابجایی» تخمینی را از طریق ناحیه چشمانداز مربوط به آن پیکسل منعکس میکند. بنابراین اندازه گیری چگونگی تأثیر ویژگی های چشم انداز بر انتخاب حرکت را فراهم می کند. با این حال، علیرغم استفاده گسترده از آن به عنوان مبنایی برای مدلهای اتصال مدرن، چارچوب مقاومت منظره محدودیتهای خود را به عنوان مبنایی برای مدلسازی حرکت حیوانات دارد – ما در بخش بحث دوباره به این موضوع خواهیم پرداخت.
سطوح مقاومت را می توان به طور تجربی با استفاده از انواع مختلفی از انواع داده ها، از جمله داده های فرصت طلبانه، داده های وقوع، داده های جابجایی، داده های ژنتیکی و داده های تله متری GPS تخمین زد. تصور می شود که دو نوع داده اخیر قوی ترین عملکرد را در برآورد مقاومت دارند [ 16 ]. داده های تله متری در مقیاس ریز اغلب ترجیح داده می شوند زیرا نسبت به داده های ژنتیکی به تغییرات زمانی حساس تر هستند [ 17 ]. علاوه بر این، از آنجایی که پراکندگی به عنوان فرآیند اولیه ای در نظر گرفته می شود که توسط آن موجودات زنده بین جمعیت ها حرکت می کنند، داده هایی (مانند تله متری) که رویدادهای پراکندگی را به شیوه ای صریح فضایی منعکس می کنند، به ویژه برای درک محرک های اتصال چشم انداز مهم هستند [ 18 ].
1.1.2. اتصال مدلسازی
هنگامی که یک سطح مقاومت ایجاد می شود، الگوریتم های زیادی وجود دارد که می توان برای پیش بینی اتصال از آنها استفاده کرد که هر کدام مزایا و محدودیت های خود را دارند. اکثر کاربردهای تحقیقات اتصال یکی از دو نوع الگوریتم را به کار گرفته اند: نظریه مدار یا رویکرد مبتنی بر فاصله هزینه [ 15 ]. محبوب ترین نوع قبلی CircuitScape [ 19 ] است که اتصال را با شبیه سازی جریان جریان در سطح مقاومت مدل می کند، به موجب آن نقاط منبع به عنوان گره های مدار و مقادیر مقاومت به عنوان قدرت مقاومت های الکتریکی در نظر گرفته می شوند.
این الگوریتم یک چگالی جریان برای هر پیکسل در سطح مقاومت تولید می کند، با مناطقی با چگالی جریان بالا که مناطقی از چشم انداز را نشان می دهد که پیش بینی می شود اتصال بالایی داشته باشند. بنابراین، حیوانات به عنوان الکترون در CircuitScape مدلسازی میشوند و مسیرها و پیچیدگیهای حرکت حیوانات به مکانیسمهای نظریه مدار الکتریکی کاهش مییابد.
در مقابل، الگوریتمهای فاصله هزینه بر اساس «هزینه سفر» تجمعی پیشبینیشده از نقاط مبدأ روی سطح مقاومت هستند، که در آن هزینه عبور از یک پیکسل با مقدار مقاومت آن داده میشود. بنابراین این الگوریتمها دسترسی به مناطق در یک چشمانداز را از یک مکان معین تخمین میزنند. ساده ترین شکل این رویکرد یک مسیر کم هزینه است که مسیر (یا راهرو) با کمترین هزینه را بین جفت پیکسل ها در سطح مقاومت مشخص می کند [ 20 ]. بر اساس این الگوریتم مسیر کمهزینه فاکتوریل است، که مسیرهای کمهزینه را بین هر مجموعه معینی از نقاط منبع [ 21 ] محاسبه میکند (پیادهسازی شده در UNICOR [ 22 ]).
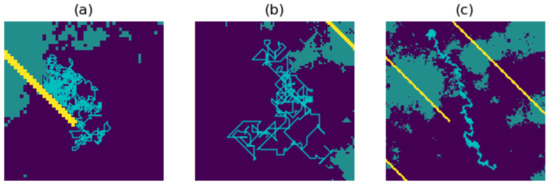
با این حال، محدودیتهای جدی برای رویکرد مسیر کمهزینه در عمل وجود دارد، بطور مرکزی که دلیل کمی برای این فرض وجود دارد که یک حیوان مسیر هزینه-فایده مسیر کمهزینه را میداند (یا حتی به آن فکر میکند) [ 23 ] . علاوه بر این، ممکن است قبل از حرکت و در حین حرکت، مقصد برای حیوان مشخص نباشد. حتی اگر چنین بود، دستیابی به دانش مقصد دقیق آنها می تواند دشوار باشد، به ویژه در مورد حیوانات پراکنده. برای رفع مشکل اخیر، الگوریتم هستههای مقاوم (همچنین در UNICOR پیادهسازی شده) برای پیشبینی چگالی حرکت به عنوان تابعی از مکانهای منبع، مقاومت در چشمانداز و قابلیتهای پراکندگی، بدون نیاز به مقصدهای مشخص، توسعه داده شد [ 24 ]. شکل 1 را ببینیدبرای تصویری از نقشه های اتصال خروجی توسط CircuitScape، مسیرهای کم هزینه فاکتوریل و هسته های مقاوم.
1.1.3. مدل های فردی
علیرغم استفاده و کاربرد گسترده آنها در زمینه های اکولوژیکی متنوع، بسیاری از محرک های اساسی حرکت حیوانات در مدل های فوق وجود ندارند. به عنوان مثال، آنها خطر مرگ و میر متفاوت یا الگوهای خودهمبستگی را که در حرکت رخ می دهد در نظر نمی گیرند [ 25 ، 26 ] (که به عنوان محدودیت CircuitScape در [ 19 ] تایید شده است). همچنین مقیاسهای فضایی متعددی را که در آن انتخاب حرکت رخ میدهد [ 27 ]، در میان چندین عامل دیگر که نقش عمدهای در شکلدهی الگوهای حرکتی ایفا میکنند (مانند تغییرپذیری مکانی-زمانی [ 28 ، 29 ]، تفاوتهای سنی [ 18 ] و فعل و انفعالات بین گونه ای [ 30]).
الگوریتم های ذکر شده در بالا، اتصال چشم انداز را با استفاده از سطح مقاومت و مجموعه ای از مکان های مشخص شده پیش بینی می کنند. در مقابل، مدلهای مبتنی بر فرد (یا عامل) حرکت را در یک چشمانداز با شبیهسازی صریح فرآیندهایی که ممکن است بر انتخاب حرکت فردی تأثیر بگذارد [ 15 ] شبیهسازی میکنند و میتوانند یک روش مبتنی بر فرآیند برای پیشبینی اتصال ارائه کنند. آنها ممکن است برای شامل پارامترهایی تطبیق داده شوند که جنبههای حرکت فوقالذکر را که در الگوریتمهایی مانند CircuitScape وجود ندارند را در بر میگیرد، به این معنی که مدلهای مبتنی بر فردی معمولاً جزئیات بسیار بیشتری را در پیشبینیهای حرکت و اتصال خود گنجاندهاند [ 31 ].
مدلهای اولیه مبتنی بر عامل (مانند [ 32 ، 33 ، 34 ]) در استفاده از آنها برای زمینههای حفاظتی به دلیل فقدان جزئیات در نظر گرفته شده برای پیچیدگی فضایی، که در آن منظره بهعنوان همگن یا بهعنوان موزاییک تکهای دوتایی در نظر گرفته میشد، محدود بودند. . الگوریتمهای مبتنی بر فردی جدید و پیچیدهتر، مانند HexSim [ 35 ] و RangeShifter [ 36 ]، اکنون از سطوح مقاومتی برای ارائه همان درجه دادههای مکانی استفاده میکنند که در مدلهای اتصال مبتنی بر مدار یا هزینه استفاده میشود. اگرچه بیشتر بر شبیه سازی پویایی های عمومی جمعیت متمرکز شده اند، اما اخیراً در مطالعات اتصال استفاده شده اند (به عنوان مثال، [ 37 ، 38]). اگرچه الگوریتمهای محاسباتی برای پیادهسازی مدلهای اتصال مبتنی بر مدار و هزینه زیاد شده است، مدلهای مبتنی بر فردی صریح فضایی هنوز کاربرد نسبتاً گستردهای در مدلسازی اتصال مشاهده نکردهاند.
1.2. راهرو
در این مقاله، ما یک مدل حرکتی جدید فضایی صریح، فردی و مبتنی بر فرآیند به نام Pathwalker را معرفی و توصیف میکنیم که برای پیشبینی مسیرهای حرکتی فردی و اتصال نقشه با پارامترهای نسبتاً کمی طراحی شده است. Pathwalker همچنین از سطوح مقاومت برای داده های ورودی فضایی خود استفاده می کند. این الگوریتم سه مکانیسم حرکتی اساسی را با هم ترکیب می کند: هزینه انرژی حرکت، انتخاب حرکت مبتنی بر مقاومت، و خطر مرگ و میر. علاوه بر این، پارامترهایی وجود دارد که دو نوع سوگیری جهتی را شامل میشوند: درجات مختلف حرکت همبسته خودکار و حرکت به سمت مقصد.
در نهایت، Pathwalker برای یک پاسخ چند مقیاسی به سطح مقاومت ناهمگن فضایی با اجازه دادن به مکانیسمهای حرکتی توابع مقاومت منظر در گسترههای فضایی مختلف در اطراف یک نقطه کانونی، توضیح میدهد. Pathwalker مسیرهای حرکت فردی را که از نقاط منبع داده شده روی یک سطح مقاومت شروع می شود، همراه با آمار خاصی در مورد هر مسیر، خروجی می دهد. این مسیرها را میتوان برای تولید یک سطح چگالی حرکت جمعآوری کرد، که توزیع حرکت را بر روی سطح مقاومت تخمین میزند و بنابراین پیشبینی مبتنی بر فرآیند اتصال چشمانداز را ارائه میدهد. همچنین گزینه ای برای تولید ارقام از مسیرهای فردی و سطح چگالی وجود دارد ( شکل 2 ).
در چارچوب فعلی مقاومت و اتصال منظر، انعطافپذیری و جزئیات ارائه شده توسط Pathwalker آن را به ابزاری قدرتمند برای پیشبینی مسیرهای حرکت در مناظر پیچیده، و برای ارائه پیشبینیهای اتصال که ممکن است با دقت بیشتری منعکس کننده بسیاری از راههای حرکت ارگانیسم باشد، تبدیل کرده است. از طریق محیط خود [ 39 ].
اما ما همچنین Pathwalker را به صراحت به عنوان یک مدل حرکت و اتصال با استفاده فوری در زمینههایی که در حال حاضر از CircuitScape، هستههای مقاوم یا مسیرهای کمهزینه فاکتوریل استفاده میشود، طراحی کردهایم. بنابراین، برخلاف نرم افزارهایی مانند HexSim و RangeShifter، رابط و تنظیمات مشابهی با این مدل ها دارد. علاوه بر این، دادههای حرکت شبیهسازیشده مبتنی بر فرآیند ارائهشده توسط Pathwalker میتواند برای آزمایش عملکرد و دقت روشهای مدلسازی مختلف و منابع داده مورد استفاده در مطالعات حرکت و اتصال [ 40 ]، مشابه کاربرد مدلهای شبیهسازی مانند CDPOP [ 41 ] استفاده شود. به این ترتیب در مطالعات ژنتیک منظر [ 42 ، 43 ] استفاده می شود.
این مقاله نحوه عملکرد Pathwalker را نشان می دهد. ما ساختار و پارامترهای مدل را توصیف می کنیم و سپس برخی از محاسبات اولیه را برای نشان دادن نحوه تعامل پارامترهای مختلف و میزان تأثیر آنها بر حرکت شبیه سازی شده انجام می دهیم. علاوه بر این، ما یک مواد تکمیلی ارائه میکنیم که نتیجه علاقه نظری را با استفاده از Pathwalker نشان میدهد: ما یک تابع چگالی حرکت برای سطوح مختلف حرکت همبسته خودکار استخراج میکنیم که اطلاعات ارزشمندی برای مدلسازی اثرات آستانههای پراکندگی بر پیشبینیهای اتصال به دست میدهد. نرم افزار Pathwalker به زبان Python 3 نوشته شده است و می توان آن را به صورت آنلاین به صورت رایگان در https://github.com/siddharth-unnithankumar/pathwalker دریافت کرد.(در 26 مه 2022 قابل دسترسی است)، مملو از مستندات و نمونه آزمایشی. برای اجرا به پایتون 3 و بسته های رایج پایتون numpy و matplotlib نیاز دارد.
2. روش ها: مدل Pathwalker
حرکت شبیه سازی شده توسط Pathwalker توسط مجموعه ای از لایه های ورودی مشخص شده و پارامترهای حرکتی کنترل می شود. این مدل با ردیابی یک مسیر بر روی سطح مقاومت انتخابی از مجموعه معینی از نقاط منبع، حرکت در هر مرحله به یکی از انتخابی از نه پیکسل – یا ماندن در موقعیت فعلی یا تغییر به یکی از هشت پیکسل مجاور – ادامه میدهد. به برخی پارامترهای حرکت احتمالی مشخص شده. در این قسمت لایه های ورودی، پارامترها و لایه های خروجی مدل را توضیح می دهیم. جزئیات فنی و اطلاعات بیشتر در مورد قالبهای فایل را میتوانید در مستندات Pathwalker در https://github.com/siddharth-unnithankumar/pathwalker بیابید.(دسترسی در 26 مه 2022). اولین نسخه Pathwalker از نوامبر 2021 (اندازه فایل 1 مگابایت) برای دانلود رایگان در این لینک در دسترس است.
2.1. لایه های ورودی
برای اجرای Pathwalker، به دو داده ورودی ضروری نیاز داریم: (1) یک سطح مقاومت و (2) یک لیست از مختصات نقطه منبع. سومین ورودی اختیاری (3) لیستی از مختصات مقصد است که اگر کاربر بخواهد حرکت به سمت مکان های مقصد را شبیه سازی کند، مورد نیاز است. چهارمین ورودی اختیاری (4) یک سطح ریسک است، برای استفاده با مکانیسم ریسک (به زیر مراجعه کنید).
سطح مقاومت (و در صورت استفاده، سطح خطر) باید در قالب ascii باشد که شامل شش ردیف هدر باشد. مختصات منبع (که معمولاً توزیع و تراکم جمعیت مورد مطالعه یا شبیهسازی شده را نشان میدهند) باید در یک فایل txt. با استفاده از طرحبندی جغرافیایی مشابه لایه سطح مقاومت ارائه شوند. در صورت استفاده از این فرمت برای مختصات مقصد اعمال می شود.
2.2. پارامترهای مدل
2.2.1. مکانیسم های حرکت
پارامتر اصلی مدل، انتخاب مکانیسم حرکت است ( شکل 3 ): انرژی، جاذبه، ریسک، یا هر ترکیبی از این سه مکانیسم اساسی که در مجموع هفت گزینه را ارائه می دهد. همراه با مکانیسم حرکت انتخابی، کاربر پارامتر دوم را مشخص می کند: حداکثر تعداد کل مراحل برای مسیر حرکت.
-
انرژی. ابتدا مقداری را برای پارامتر “انرژی کل” مشخص می کنیم که نشان دهنده حداکثر هزینه مجاز تجمعی انرژی حرکت است. سپس واکر یک راه رفتن تصادفی بی طرفانه را روی سطح مقاومت دنبال می کند و بنابراین در هر مرحله یکی از 9 پیکسل را با احتمال مساوی انتخاب می کند. برای پیکسلهایی که در پیادهروی عبور میکنند، مجموع تجمعی مقادیر مقاومت محاسبه میشود. زمانی که این مجموع به مقدار انرژی کل انتخاب شده برسد یا از آن فراتر رود، یا پس از رسیدن به حداکثر تعداد پله ها، پیاده روی به پایان می رسد.
-
جاذبه. واکر اکنون یک پیاده روی تصادفی مبتنی بر مقاومت را دنبال می کند. احتمال انتخاب هر یک از 9 پیکسل با معکوس مقدار مقاومت آن پیکسل داده می شود (که در آن مقادیر مقاومت معکوس به گونه ای مقیاس بندی می شوند که نه مقدار معکوس یک توزیع احتمال ارائه می دهند؛ به عبارت دیگر، این نه مقدار معکوس مجموع 1 می شود. ). بنابراین، واکر بیشتر احتمال دارد به پیکسل هایی با مقدار مقاومت پایین تر حرکت کند و بالعکس. به چهار پیکسل مجاور مورب وزنی برابر با 1/ داده می شود. 2برای محاسبه افزایش فاصله هنگام حرکت مورب. این مکانیسم نیازی به تعیین هیچ پارامتر اضافی ندارد و پس از رسیدن به حداکثر تعداد مراحل، پیاده روی به پایان می رسد.
-
خطر. اگر ریسک تنها عامل انتخاب شده در حرکت باشد، ابتدا سطح ریسک انتخابی را مشخص می کنیم. این ممکن است متناسب با سطح مقاومت ما باشد (تنظیم پیش فرض)، یا ممکن است سطح دیگری انتخاب شود، اما باید به گونه ای مقیاس شود که مقادیر سطح ریسک بین 0 (بدون خطر) و 1 (بالاترین خطر) قرار گیرد. سپس واکر یک راه رفتن تصادفی بی طرفانه را روی سطح خطر دنبال می کند. در هر مرحله، احتمال پایان راه رفتن با مقدار آن پیکسل در سطح خطر داده می شود. حداکثر طول پیاده روی محدود به حداکثر تعداد قدم های انتخاب شده است.
2.2.2. مقیاس فضایی انتخاب حرکت
علاوه بر انتخاب یکی از هفت مکانیسم حرکتی که در بالا توضیح داده شد، می توانیم مقیاس فضایی را انتخاب کنیم که این مکانیسم ها در آن کار می کنند. این شامل دو پارامتر است: مقیاس پاسخ (“اندازه پنجره”) و شکل عملکردی پاسخ (“عملکرد مقیاس”).
-
اندازه پنجره مقیاس فضایی را تعیین می کند که در آن حرکت به مقادیر مقاومت پاسخ می دهد. برای مثال، اگر اندازه پنجره انتخابی 7 در 7 باشد، آنگاه حرکت تحت تأثیر مقادیر مقاومت در همسایگی 7 در 7 پیکسل هر یک از 9 پیکسل خواهد بود. مقیاس پیشفرض، یک پنجره 1 به 1، معادل عدم استفاده از مقیاس بندی فضایی است.
-
تابع مقیاسبندی نحوه واکنش واکر به مقاومت منظره را در مقیاس فضایی انتخابی n تعیین میکند. سه انتخاب برای تابع مقیاس بندی وجود دارد: میانگین کانونی، حداکثر کانونی و حداقل کانونی. با میانگین کانونی، مقدار مقاومت یک پیکسل با میانگین میانگین مقادیر مقاومت همه پیکسل ها در یک همسایگی n در n آن پیکسل جایگزین می شود. با حداکثر کانونی، مقدار یک پیکسل با حداکثر مقدار پیکسل در آن محله جایگزین می شود. با حداقل کانونی، با حداقل مقدار جایگزین می شود. اندازه پنجره و عملکرد پوسته پوسته شدن نیز بر روی سطح خطر (در صورت استفاده) به این ترتیب عمل می کند.
اجازه دهید به یک مثال از این نگاه کنیم تا با جزئیات بیشتری ببینیم که چگونه این پوسته پوسته شدن با مکانیسم های حرکتی تعامل دارد. فرض کنید یک پنجره 5 در 5 با تابع مقیاس بندی میانگین کانونی انتخاب می کنیم. «مقدار مقیاسشده» یک پیکسل را بهعنوان میانگین مقادیر مقاومت در همسایگی 5 در 5 این پیکسل تعریف کنید. سپس، در مورد انرژی، مجموع تجمعی از مقادیر مقیاس شده پیکسل های عبور داده شده محاسبه می شود. برای جذب، احتمال انتخاب یکی از 9 پیکسل ممکن با معکوس مقادیر مقاومت مقیاس داده شده است. با ریسک، احتمال پایان راه رفتن در هر پیکسل پیمایش شده توسط مقدار مقیاس شده پیکسل در سطح خطر داده می شود ( شکل 4 ).
2.2.3. جهت: همبستگی خودکار و سوگیری مقصد
Pathwalker دو پارامتر را برای تعیین سوگیری جهت حرکت ارائه می دهد: پارامتر همبستگی خودکار C و درجه سوگیری D نسبت به یک مقصد. آنها در پشت سر هم با مکانیسم های حرکت و پوسته پوسته شدن کار می کنند ( شکل 5 ). هر دو C و D می توانند به طور همزمان غیر صفر باشند. با این حال، مجموع سی+Dلازم است حداکثر برابر با 1 باشد.
-
خودهمبستگی. این پارامتر C مقادیری بین 0 و 1 می گیرد و میزان تمایل واکر برای ادامه مسیر فعلی را تعیین می کند. مقدار پیشفرض C 0 است، یک پیادهروی تصادفی غیرهمبسته. اگر مقدار C را افزایش دهیم ، پیاده روی ما با حالت شدید همبستگی بیشتری پیدا می کند سی=1منجر به یک خط مستقیم می شود (به عبارت دیگر، مسیری که در آن واکر در همان جهت با احتمال 1 ادامه می دهد). مثلا اگر انتخاب کنیم سی=0.3، سپس احتمالات 9 حرکتی به صورت مجموع مقیاس بندی می شوند 1–0.3=0.7به جای جمع کردن با 1، و اکنون یک احتمال اضافه شده 0.3 برای ادامه در همان جهت مرحله قبل وجود خواهد داشت.
-
تعصب مقصد این پارامتر D مقادیری بین 0 و 1 می گیرد و میزان سوگیری مسیر به سمت نقطه مقصد X در سطح مقاومت را تعیین می کند. با دادن اولویت بیشتر به حرکت به پیکسل نزدیک به جهت X کار می کند. مقدار پیش فرض 0 است که در آن هیچ سوگیری نسبت به مقصد وجود ندارد. همانطور که مقدار D را افزایش می دهیم ، با حالت شدید ، راه رفتن به سمت X بیشتر می شودD=1منجر به ایجاد مسیری می شود که یک خط مستقیم به سمت X است. به عنوان مثال، اگر D=0.2، سپس احتمالات 9 حرکتی به صورت مجموع مقیاس بندی می شوند 1–0.2=0.8به جای جمع کردن به 1، و اکنون یک احتمال 0.2 برای حرکت به نزدیکترین پیکسل به جهت X وجود خواهد داشت.
2.2.4. پارامترهای اضافی
در نهایت، کاربر چهار پارامتر را تعیین می کند که خروجی مدل را تعیین می کند: (1) نحوه جفت شدن مکان های مبدا و مقصد. (2) چند بار مدل باید برای هر جفت منبع-مقصد اجرا شود. (3) کدام خروجی ها (مسیرهای فردی، آمار مسیر، و سطح چگالی) مورد نظر هستند. و (4) کدام ارقام مورد نظر است.
2.3. لایه های خروجی
بهطور پیشفرض، الگوریتم یک مسیر حرکت را برای هر نقطه منبع خروجی میدهد – به عبارت دیگر، فهرست مختصات مسیر را از هر نقطه منبع برمیگرداند. همچنین میتوانیم مدل را برای خروجی سه آمار برای هر مسیر انتخاب کنیم: (الف) تعداد کل گامهای برداشته شده، (ب) هزینه انرژی تجمعی به دست آمده (اگر انرژی درگیر باشد)، و (ج) کل ریسک انباشته شده (اگر خطر دخیل است).
علاوه بر مسیرهای حرکت فردی و آمار آنها، ما می توانیم پیش بینی اتصال چشم انداز را انتخاب کنیم. این با جمع کردن تمام مسیرهای حرکتی منفرد در یک “سطح چگالی حرکت” ایجاد می شود. سطح چگالی دارای فرمت و ابعاد مشابه سطح مقاومت است. مقدار هر پیکسل با تعداد کل دفعاتی که آن پیکسل در تمام مسیرهای حرکتی عبور کرده است، داده می شود. هنگام تولید یک سطح چگالی برای پیشبینی اتصال، توصیه میکنیم مدل را چندین بار از هر نقطه مبدا (یا جفت نقطه مبدا-مقصد) اجرا کنید، به طوری که سطح چگالی حاصل توزیع تصادفی مسیرهای حرکتی ممکن را میانگین کند. همچنین می توان برای مسیرهای حرکتی و سطح چگالی فردی ارقام ارائه کرد (همانطور که در شکل 2 مشاهده می شود).
2.4. خلاصه ای از راه اندازی Pathwalker
به طور خلاصه، ابتدا سطح مقاومتی را انتخاب می کنیم که می خواهیم مسیرها روی آن اجرا شوند، همراه با لیستی از مختصات منبع. در صورت تمایل، ممکن است مختصات مقصد و/یا سطح ریسک را نیز ارائه کنیم. سپس یکی از هفت مکانیسم را برای حرکت خود انتخاب می کنیم و حداکثر طول مسیر را انتخاب می کنیم. اگر از مکانیسم انرژی استفاده شود، مقدار انرژی کل را نیز مشخص می کنیم.
علاوه بر این، میتوانیم با انتخاب یک تابع مقیاسگذاری و یک پنجره مقیاسبندی بزرگتر از اندازه پیشفرض ۱ به ۱، مقیاسبندی فضایی را در حرکت بگنجانیم. ما همچنین میتوانیم با انتخاب یک مقدار غیرصفر برای پارامترهای C و D ، حرکت خودهمبسته و سوگیری مقصد را در پیادهروی خود بگنجانیم .
در نهایت، نحوه جفت شدن مکانهای مبدا و مقصد، چند بار اجرای الگوریتم از هر نقطه و اینکه آیا مایلیم خروجی ما مختصات مسیرهای حرکت، آمار هر مسیر، چگالی حرکت را شامل شود را انتخاب میکنیم. سطح و هر شکل برای تصویری از این شماتیک به شکل 6 مراجعه کنید .
3. مطالعه موردی
در این بخش، ما مطالعهای در مورد نحوه تعامل پارامترهای مختلف حرکت Pathwalker و میزان تأثیر هر جزء بر پیشبینیهای اتصال Pathwalker ارائه میکنیم. ما این کار را با تجزیه و تحلیل و مقایسه سطوح چگالی حاصل از تنظیمات پارامترهای مختلف انجام می دهیم. تمامی تحلیل های این مقاله در پایتون 3.8 انجام شده است.
3.1. تولید سطوح چگالی
ما ابتدا یک سطح مقاومت انتخابی را همراه با 100 نقطه منبع که به طور تصادفی در سطح مقاومت توزیع شده اند ارائه می کنیم. برای مواردی که سوگیری مقصد را لحاظ می کنیم، از همان 100 نقطه به عنوان مقصد نیز استفاده می کنیم.
سپس، سطوح چگالی را از آن محاسبه می کنیم 4×2×2×2=32پیکربندی های مختلف مدل این ترکیب ها شامل: چهار مکانیسم حرکتی (انرژی، جاذبه، ریسک یا هر سه ترکیبی)، دو مقیاس فضایی (1 در 1 یا 7 در 7) با تابع مقیاس بندی میانگین کانونی، دو درجه خودهمبستگی 0 یا 0.35) و دو درجه سوگیری مقصد (0 یا 0.35). در تولید سطوح چگالی، مدل را 100 بار از هر نقطه منبع اجرا می کنیم تا تغییرات تصادفی در مسیرهای حرکت را میانگین کنیم.
3.2. مقایسه سطوح چگالی
ما چهار آزمون Mantel [ 44 ] را برای مقایسه تأثیر هر یک از چهار پارامتر حرکت (مکانیسم حرکت، مقیاس، همبستگی خودکار و سوگیری مقصد) بر روی حرکت شبیهسازی شده توسط Pathwalker انجام میدهیم.
پس از تولید 32 سطح چگالی، ماتریس M 32 در 32 می سازیم که من،j-entry با ریشه میانگین مربعات خطا بین سطح i و سطح j داده می شود. ماتریس خطای M اندازهگیری شباهت بین 32 سطح چگالی مختلف را ارائه میکند، که در آن مقادیر کوچکتر ورودیهای M مربوط به جفتهای سطوحی است که مشابهتر هستند.
سپس برای تعیین کمیت میزان تأثیر چهار پارامتر مختلف بر حرکت در سطح مقاومت (و در نتیجه میزان تغییرات ورودی های M را توضیح می دهند ) ما چهار تست Mantel را انجام می دهیم که هر کدام ماتریس خطای M را با ماتریس خطا مقایسه می کنند. “ماتریس مدل” مربوط به یکی از چهار پارامتر مختلف. ما این ماتریس های مدل را برچسب گذاری می کنیم م1، م2، م3، و م4به ترتیب مربوط به مکانیسم حرکت، مقیاس، خودهمبستگی و سوگیری مقصد است.
اکنون مثالی میآوریم تا با جزئیات بیشتری ببینیم که چگونه یکی از این ماتریسهای مدل، مثلاً م3(که مربوط به پارامتر خودهمبستگی است)، ساخته شده و سپس با M مقایسه می شود. برای ساخت ماتریس باینری 32 در 32 م3، ما می دهیم من،j-اگر سطح i و سطح j از مقادیر خودهمبستگی متفاوت تولید می شوند، مقدار 0 را وارد کنید – برای مثال، اگر سطح i با استفاده از سی=0خودهمبستگی و سطح j با استفاده از سی=0.35. ما می دهیم من،j-مقدار 1 را وارد کنید اگر سطح i و سطح j با استفاده از مقدار یکسانی از پارامتر همبستگی خودکار تولید می شوند – برای مثال، اگر هر دو با استفاده از سی=0. سپس به مقایسه M و م3، ما یک تست Mantel بین M و انجام می دهیمم3. این کمیت شباهت این دو ماتریس را فراهم می کند، و بنابراین میزان تغییر پارامتر همبستگی خودکار برای تغییر بین سطوح چگالی را نشان می دهد.
ما روش فوق را دو بار اجرا می کنیم، اول با استفاده از یک سطح مقاومت شبیه سازی شده ساده، و در مرحله دوم با استفاده از سطح مقاومت به دست آمده تجربی از [ 18 ] ( شکل 7 ). اولی به ما اجازه می دهد تا به وضوح ببینیم که چگونه پارامترهای مختلف بر تراکم حرکت روی سطح مقاومت ساده تأثیر می گذارند، و دومی نشان می دهد که چگونه مدل با یک مثال واقعی از سطح مقاومت استفاده شده در عمل اجرا می شود.
در هر دو مورد، سطح از 256 در 256 پیکسل تشکیل شده است که مقادیر مقاومت بین 1 تا 100 را می گیرد و توسط مانعی با مقاومت بی نهایت احاطه شده است که در صورت لمس به راه رفتن پایان می دهد. هنگامی که مکانیسم ریسک درگیر است، سطح ریسک را به سادگی متناسب با سطح مقاومت در نظر می گیریم (به عبارت دیگر، سطح ریسک سطح مقاومتی است که به گونه ای مقیاس بندی شده است که مقادیر آن بین 0 و 1 باشد). برای این تجزیه و تحلیل، ما از scipy و mantel بسته های Python 3.8 [ 45 ] و برای مواد تکمیلی ، از scipy و scikit-learn [ 46 ] استفاده می کنیم.
4. نتایج
نتایج آزمون Mantel که تأثیر چهار پارامتر حرکت را مقایسه می کند برای سطوح مقاومت شبیه سازی شده و تجربی مشابه است ( جدول 1 ). یعنی در هر دو مورد متوجه میشویم که دو پارامتری که بیشتر تفاوت بین سطوح چگالی را توضیح میدهند، مکانیسم حرکت (که بین انرژی، جاذبه، ریسک و ترکیب سهطرفه آنها متفاوت است) و درجه سوگیری مقصد D (که طول کشید) است. مقادیر 0 یا 0.35).
ما میتوانیم این را از مقدار p کوچک (به طور معادل، z -score بالا) ببینیم، که نشان میدهد شباهت بین M و م1و همچنین M و م4بسیار محتمل است که این دو عامل میزان تفاوت مقادیر سطوح چگالی را توضیح دهند. در این دو مورد مکانیسم حرکت و سوگیری مقصد، مقدار ضریب همبستگی پیرسون است ρاگرچه نزدیک به 1 نیست، اما نمونه ای از آزمون های Mantel است که در آن شباهت زیادی بین دو ماتریس درگیر وجود دارد.
در مقایسه، نه درجه خودهمبستگی در حرکت و نه میزان مقیاس بندی فضایی به اندازه کلی تفاوت در سطوح چگالی ایجاد نکردند. با این حال، هنگام پیکربندی درجه سوگیری جهت در مدل، توجه به موارد زیر ضروری است: در حالی که تغییر خودهمبستگی C از 0 به 0.35 به اندازه تغییر درجه بایاس مقصد D تأثیر زیادی بر سطوح چگالی حاصل نداشت. از 0 به 0.35، اگر در عوض پارامتر خودهمبستگی C را تغییر داده بودیماز 0 به یک مقدار بالاتر (مثلا 0.9)، آنگاه میتوانیم انتظار تغییرات چشمگیرتری در سطوح چگالی حاصل را داشته باشیم. تجزیه و تحلیل در این مقاله به سادگی نشان می دهد که تغییر درجه سوگیری مقصد تأثیر بیشتری بر تراکم حرکت خواهد داشت تا زمانی که پارامتر خودهمبستگی را به همان میزان تغییر دهیم.
نتایج این تحلیل را می توان با نگاهی به شکل 8 و شکل 9 پیش بینی کرد . به عنوان مثال، می بینیم که مکانیسم انرژی نقشه بسیار متفاوتی از چگالی نسبت به مکانیسم جذب ایجاد می کند، زیرا مکانیسم دوم باعث می شود که حرکت اغلب از مناطق با مقاومت بالا اجتناب کند، اما وسعت حرکت را در ناحیه ای با مقاومت بالا محدود نمی کند. جالب توجه است، در این مطالعه موردی که در آن سطح ریسک با سطح مقاومت متناسب است، مکانیسم ریسک چگالی حرکتی مشابه با مکانیسم انرژی ایجاد میکند، علیرغم اینکه مکانیسمهای انرژی و ریسک از لحاظ نظری کاملاً متفاوت هستند. اگر سطح ریسک مورد استفاده متناسب با سطح مقاومت نباشد، این شباهت احتمالا کمتر خواهد بود.
5. بحث
در این مقاله، Pathwalker را معرفی و توصیف کردیم، یک مدل جدید فضایی صریح، فردی و مبتنی بر فرآیند برای شبیهسازی حرکت ارگانیسم از طریق مناظر ناهمگن. Pathwalker از پارامترهای حرکتی مختلفی استفاده میکند که جزئیات بیشتری را در پیشبینی اتصال منظره نسبت به مدلهای پرکاربرد مانند CircuitScape و هستههای مقاوم امکانپذیر میکند. یعنی Pathwalker حرکت را به عنوان تابعی از مقاومت چشمانداز، هزینه انرژی و خطر مرگ و میر در مقیاسهای فضایی چندگانه شبیهسازی میکند، در حالی که به طور همزمان همبستگی و سوگیری مقصد را در حرکت محاسبه میکند.
اهمیت و کاربرد تکنیکهای شبیهسازی برای پرداختن به سؤالات اکولوژیکی بنیادی در بسیاری از شاخههای بومشناسی فضایی ثابت شده است: به عنوان مثال، استفاده از CDPOP در ژنتیک منظر [ 43 ، 47 ، 48 ]، و HexSim در پویایی جمعیت [ 49 ، 50 ] . با توجه به این موضوع، ما Pathwalker را با یک چارچوب ساده و بسیار انعطافپذیر طراحی کردیم تا طیف گستردهای از پاسخهای رفتاری به ویژگیهای منظر را بررسی کند، و امکان ارزیابی سؤالات نظری و روششناختی در بومشناسی منظر و حرکت، علم حفاظت و مدلسازی اتصال را فراهم کند (همانطور که در مواد تکمیلی ؛ همچنین رجوع کنید به [ 40]).
5.1. ارتباط با مدل های محبوب اتصال
مدلهای اتصال محبوب، مانند CircuitScape، هستههای مقاوم، و مسیرهای کمهزینه فاکتوریال، بهطور آشکاری بسیاری از محرکهای کلیدی حرکت حیوانات را در نظر نمیگیرند، که استفاده مؤثر از آنها را برای رسیدگی به پیچیدگیها و غنای بسیاری از سناریوها در محیط زیست کاربردی و حفاظت بسیار محدود میکند. علوم پایه.
به عنوان مثال، آنها فرض می کنند که خطر مرگ و میر در مناطق مختلف چشم انداز بدون تغییر باقی می ماند و انتخاب حرکت در یک مقیاس فضایی واحد رخ می دهد. همانطور که در [ 19 ] اشاره شد، CircuitScape بیشتر احتمال حرکت متقارن بین دو پیکسل مجاور را فرض می کند، حتی اگر حرکت از ناحیه ای با مقاومت بالاتر به پایین تر (یا هزینه انرژی، یا خطر مرگ و میر) بسیار بیشتر از عکس آن باشد. علاوه بر این، مکانیسمهای پیادهروی تصادفی ساده در این مدلها، علیرغم تأثیر همبستگی خودکار بر الگوهای حرکتی، یک واکر «بدون حافظه» را فرض میکنند [ 25 ، 26 ].
در مقابل، Pathwalker میتواند این جنبههای مهم حرکت را در پیشبینیهای اتصال خود بگنجاند. سایر مدلهای مبتنی بر فضایی جدید، مانند HexSim و RangeShifter نیز شامل پارامترهای متعددی هستند که جزئیات بیشتری را در شبیهسازی عوامل مؤثر بر الگوهای حرکتی ارائه میکنند. به عنوان مثال، مانند سطح خطر Pathwalker، HexSim امکان استفاده از سطوح مقاومت مانند متعددی را که ویژگیهای منظره (مانند منابع غذایی و آشیانه) را تقریب میکنند، علاوه بر دادههای ورودی فضایی مقاومت منظره، میدهد.
اگرچه HexSim و RangeShifter برخی از کاربردهای اخیر را در مطالعات اتصال دیدهاند (مانند [ 37 ])، این مدلهای مبتنی بر فردی عمدتاً بر شبیهسازی پویاییهای عمومی جمعیت متمرکز هستند. Pathwalker به طور خاص برای شبیهسازی مسیرهای حرکتی فردی و پیشبینی اتصال، با رابطی شبیه به UNICOR (که هستههای مقاوم و مسیرهای کمهزینه فاکتوریل را پیادهسازی میکند) و CircuitScape طراحی شده است تا امکان استفاده فوری و ساده از آن را در مدلسازی اتصال فراهم کند.
5.2. محدودیت ها، پیشرفت های بیشتر، و زمینه گسترده تر
مکانیسمهای مبتنی بر فرآیند Pathwalker به برخی از تأثیرات مهم روی الگوهای حرکتی توجه میکنند، که در مدلهایی مانند CircuitScape و بسیاری از رویکردهای فاصلهای هزینه، مانند هستههای مقاوم وجود ندارند. با این حال، سایر محرکهای اساسی حرکت و اتصال هنوز در همه الگوریتمهای مبتنی بر مقاومت مورد بحث در بالا، از جمله مدلهای مبتنی بر فردی مانند Pathwalker، در نظر گرفته شدهاند. به طور مرکزی، در چارچوب مقاومت چشمانداز، ما اذعان میکنیم که توجه کمی به اثر عظیم تغییرات مکانی – زمانی در رابطه پویا بین حیوانات و منظره شده است.
به طور موقت، مثالها شامل نقش چشمگیر رفتار مهاجرتی و چرخههای مختلف فصلی در تصمیمگیریهای حرکتی است [ 28 ، 29 ، 51 ، 52 ]. از نظر فضایی، انتخاب های انجام شده بین ویژگی های منظر بسته به ترکیب منحصر به فرد هر منطقه ای که از طریق [ 53 ، 54 ] سفر می شود، با مناطق مختلف که منجر به تخمین های متفاوتی از چگونگی تأثیر متغیرهای محیطی بر حرکت می شود، تغییر خواهد کرد [ 55 ]. پیچیدگی فضایی و زمانی در قلب رابطه بین جانور و منظر است [ 56]، تا حدی که الگوهای حرکت در فضا و زمان را نمی توان از طریق ترکیبی جهانی قابل اجرا از شرایط محیطی ایستا زمانی درک کرد. ما باید روش شناسی هایی را برای انعکاس این موضوع توسعه دهیم (به کارهای اخیر، مانند [ 57 ] مراجعه کنید).
به طور کلی، مدلهای اتصال مبتنی بر مقاومت برای به تصویر کشیدن بسیاری از راههای دیگر که در آن الگوهای حرکتی کاملاً تحت تأثیر جزئیات زمینهای کلیدی قرار میگیرند که حیوان در مکان و زمان حرکت میکند، کار چندانی نمیکند [ 23 ]. مناظر زمین به طور فزاینده ای با حضور انسان زایی شکل می گیرند. برای اینکه مدل های اتصال مرتبط و قابل اعتماد باقی بمانند، تأثیر پویای حضور انسان بر حرکت باید به اندازه کافی مورد توجه قرار گیرد [ 58 ، 59 ، 60 ]. روابط غنی و تعاملی بین انسان ها و حیوانات دیگر، و اثرات ناشی از آن بر مسیرهای حرکتی آنها، به ندرت می تواند با چارچوب ساده، موقتا ایستا، هزینه-فایده مقاومت در برابر چشم انداز توضیح داده شود [ 61 ,62 ، 63 ، 64 ، 65 ]. مدلهای مبتنی بر مقاومت نیز بهرغم اهمیت ثابت تغییر حالات فیزیولوژیکی و احساسی آنها در تصمیمگیریهای حرکتی، معمولاً کاریکاتور بدون تغییر و جهانی از رفتار حیوانات را در نظر میگیرند [ 39 ، 66 ، 67 ].
برای درک بهتر و ارزیابی پویایی پیچیده حرکت حیوانات که در واقعیت اتفاق میافتد، باید راههایی پیدا کنیم تا در مدلهای محاسباتی خود بپذیریم و بیان کنیم که حیوانات بهعنوان خودکارهای مکانیکی رفتار نمیکنند و در ارتباط با یک چشمانداز بیاثر مطابق با شرایط اقتصادی عمل میکنند و حرکت میکنند. قوانین هزینه و فایده زندگی آنها بسیار خلاق تر، دوست داشتنی تر و کاریزماتیک تر از این است [ 68 ، 69 ]. اگر بتوانیم تکنیکهای مدلسازی را توسعه دهیم که به عنوان مثال به کیفیت و کمیت زندگی حیوانات مربوط میشود، این ابزارها برای حفاظت مؤثر، انعطافپذیر و دلسوزانه ارزش بیشتری خواهند داشت [ 70 ، 71 ، 72 ، 73 ] .
از جغرافیای بیش از انسان تا فیزیولوژی حفاظت، تلاشهایی در سراسر رشتههای اکولوژیکی برای توسعه خلاقانه روشها و مدلهای جامعتر برای درک و پیشبینی حرکت و اتصال حیوانات [ 6 ، 74 ، 75 ، 76 ] در حال ظهور است. این یک فرصت فوقالعاده برای گفتگو و همکاری میان رشتهای برای کشف و شناسایی اهداف و پارامترهای جدید برای مدلسازی اتصال فراهم میکند [ 77 ]. همانطور که در پاراگراف پایانی [ 78 ] بحث شد، ما میتوانیم با گشودن راههای متعدد برای درک فرآیندهای خلاقانه و مولد آن، غنا و شگفتی این دنیای زنده، نفسکش و فراتر از انسان را ارج نهیم.1 ، 79 ، 80 ، 81 ].
بنابراین توجه جدی به این پیچیدگیهای چندگانه حرکت حیوانات یک چالش اصلی برای آینده علم حفاظت و مدلسازی اتصال است، و چنین تلاشهایی برای کشف و توسعه زمان میبرد. با در نظر گرفتن این موضوع، ما Pathwalker را در چارچوب آشنای مقاومت منظره و تئوری راه رفتن تصادفی برای استفاده فوری آن در شبیهسازی مسیرهای حرکتی و مدلسازی اتصال منظره ایجاد کردیم، اما به عنوان ابزاری با جزئیات و انعطافپذیری بیشتر از مدلهای اتصال رایج که در حال حاضر استفاده میشوند.
5.3. نتیجه گیری
مدلسازی و پیشبینی حرکت ارگانیسمها و اتصال چشمانداز بخش اساسی علم اکولوژیک مدرن است. با این حال، مدلهای اتصال غالب که در حال حاضر مورد استفاده قرار میگیرند، به دلیل مفروضات سادهگرایانه و بیش از حد تقلیلگرایانه رفتار حرکتی آنها بسیار محدود شدهاند. در این مقاله، ما تلاش کردیم تا با معرفی یک مدل جدید فضایی صریح، فردی و مبتنی بر فرآیند به نام Pathwalker به این موضوع بپردازیم، که مدلسازی مسیرهای فردی و اتصال منظره را به عنوان تابعی از انتخاب حرکت مبتنی بر مقاومت، هزینه انرژی حرکت، خطر مرگ و میر، همبستگی خودکار، و سوگیری جهت به سمت یک مقصد، همه در مقیاس های فضایی چندگانه.
علاوه بر این، Pathwalker یک ابزار شبیهسازی ارزشمند برای ارزیابی سوالات نظری و روششناختی در اکولوژی فضایی و علم حفاظت ارائه میکند. ضمن اذعان به محدودیتهای مدلهای مبتنی بر مقاومت برای توجه به غنا و پیچیدگی رفتار حرکت حیوانات، ما Pathwalker را با رابطی شبیه به برنامههایی مانند CircuitScape و UNICOR برای جذب ساده و فوری آن در مدلسازی حرکت و اتصال طراحی کردیم.
مواد تکمیلی
اطلاعات پشتیبان زیر را می توان در این آدرس دانلود کرد: https://www.mdpi.com/article/10.3390/ijgi11060329/s1 ، شکل S1: چهار سطح چگالی تولید شده از چهار مقدار همبستگی مختلف. شکل S2: همان چهار سطح چگالی که اکنون در فضای سه بعدی با همان رنگ آمیزی بالا ترسیم شده است. جدول S1: آمار برای چهار سطح چگالی تولید شده از چهار مقدار همبستگی مختلف. ردیف اول وسعت کلی مسیرهای حرکت در سطح مقاومت 500 در 500 را نشان می دهد و ردیف دوم درصد کل مساحت تحت پوشش این مسیرها را نشان می دهد. دو ردیف آخر پارامترهای و را می دهند r2مقدار برای توابع توان برازش و نمایی به ترتیب.
مشارکت های نویسنده
مفهوم سازی، سیدارت یونیتان کومار، ژانتا کاستا، ساموئل آ. کوشمن. پیاده سازی، سیدهارت یونیتان کومار; نویسندگی، سیدارت یونیتان کومار، ژانتا کازتا، ساموئل آ. کوشمن. همه نویسندگان نسخه منتشر شده نسخه خطی را خوانده و با آن موافقت کرده اند.
منابع مالی
این تحقیق توسط کالج پمبروک، آکسفورد تامین مالی شد. و توسط شورای تحقیقات مهندسی و علوم فیزیکی به شماره EP/R513295/1.
بیانیه در دسترس بودن داده ها
داده های مورد استفاده برای مطالعه موردی در این مقاله در صورت درخواست نویسنده مربوطه در دسترس است. مدل Pathwalker، همراه با مستندات و یک نمونه آزمایشی، برای دانلود آنلاین در https://github.com/siddharth-unnithankumar/pathwalker (در 26 مه 2022) در دسترس است.
قدردانی
سیذارت یونیتان کومار مایل است قدردانی های زیر را انجام دهد. من عمیقا از همه خانواده و دوستانم برای محبتشان تشکر می کنم. ساندیا پاتل، فیلیپ ماینی، و کارکنان نظافتچی و تعمیر و نگهداری در مؤسسه ریاضی آکسفورد برای حمایت مستمرشان. لیلا بروستاد، تئو لی، ژوزفین رینل و ماریا نمتانو به خاطر مهربانی و سخاوتشان (و غذاهای خوشمزه). دوستان عزیزم از دوره طبیعت، جامعه و اداره محیط زیست 2021/22 به خاطر زیبایی و خویشاوندی شان؛ هوگو شاکشفت، امیلی کارسون، آلگرا وینت و دیوید آبرام به خاطر خرد، شگفتی و شفقتشان. و برای اینکه قلبم آواز بخواند، به Thich Nhat Hanh، بودا، Dhamma و Sangha، Port Meadow، مناظر جزیره لاک پشت، و زمینی که بیش از انسانیت خانه ماست، تعظیم می کنم.
تضاد علاقه
نویسندگان هیچ تضاد منافع را اعلام نمی کنند.
منابع
- آبرام، دی . طلسم حسی: ادراک و زبان در دنیایی فراتر از انسان . قدیمی: شهر نیویورک، نیویورک، ایالات متحده آمریکا، 1996. [ Google Scholar ]
- اینگولد، تی. زنده بودن: مقالاتی در مورد حرکت، دانش و شرح . Routledge: Abingdon-on-Thames، UK، 2011. [ Google Scholar ] [ CrossRef ] [ Green Version ]
- Fahrig, L. اثرات تکه تکه شدن زیستگاه بر تنوع زیستی. آنو. کشیش اکول. تکامل. سیستم 2003 ، 34 ، 487-515. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Cushman، SA اثرات از دست دادن زیستگاه و تکه تکه شدن روی دوزیستان: بررسی و بروشور. Biol. حفظ کنید. 2006 ، 128 ، 231-240. [ Google Scholar ] [ CrossRef ]
- کوشمن، SA; الیوت، NB; مک دونالد، DW; Loveridge، AJ ارزیابی چند مقیاسی از اتصال جمعیت در شیرهای آفریقایی (Panthera leo) در پاسخ به تغییر منظر. Landsc. Ecol. 2016 ، 31 ، 1337–1353. [ Google Scholar ] [ CrossRef ]
- Lorimer, J. Wildlife in the Anthropocene: Conservation After Nature ; انتشارات دانشگاه مینه سوتا: مینیاپولیس، MN، ایالات متحده آمریکا، 2015. [ Google Scholar ]
- Abram, D. Becoming Animal: An Earthly Cosmology ; قدیمی: شهر نیویورک، نیویورک، ایالات متحده آمریکا، 2010. [ Google Scholar ]
- اینگولد، T. نقطه، خط و نقطه مقابل: از محیط تا فضای سیال. در Neurobiology of “Umwelt” ; Springer: برلین/هایدلبرگ، آلمان، 2009; صص 141-155. [ Google Scholar ]
- لوین، SA مسئله الگو و مقیاس در اکولوژی: سخنرانی جایزه رابرت اچ. مک آرتور. اکولوژی 1992 ، 73 ، 1943-1967. [ Google Scholar ] [ CrossRef ]
- جنبش دوزیستان گیبس، جی پی در پاسخ به لبههای جنگل، جادهها و بسترهای رودخانهای در جنوب نیوانگلند. جی. وایلدل. مدیریت 1998 ، 62 ، 584-589. [ Google Scholar ] [ CrossRef ]
- اینگولد، تی . ادراک محیط: مقالاتی در مورد معیشت، سکونت و مهارت . Routledge: Abingdon-on-Thames، UK، 2000. [ Google Scholar ]
- تیشندورف، ال. Fahrig, L. در مورد استفاده و اندازه گیری اتصال چشم انداز. Oikos 2000 ، 90 ، 7-19. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- رودنیک، دی. رایان، اس جی. بییر، پی. کوشمن، SA; دیفن باخ، اف. ایپس، سی. Gerber, LR; هارتر، JN; جنس، جی اس. کینتچ، جی. و همکاران نقش اتصال چشم انداز در برنامه ریزی و اجرای اولویت های حفاظت و مرمت مسائل زیست محیطی. 2012 ، 16 ، 1-23. [ Google Scholar ]
- هیلتی، جی. لیدیکر، WZ، جونیور؛ Merenlender، AM Corridor Ecology: علم و عمل پیوند مناظر برای حفاظت از تنوع زیستی . مطبوعات جزیره: واشنگتن، دی سی، ایالات متحده آمریکا، 2012. [ Google Scholar ]
- کوشمن، SA; McRae، BH; آدریانسن، اف. بییر، پی. شرلی، م. Zeller، K. راهروهای بیولوژیکی و اتصال. در موضوعات کلیدی در زیست شناسی حفاظت 2 ; Macdonald، DW، Willis، KJ، Eds. Wiley-Blackwell: Hoboken, NJ, USA, 2013; فصل 21; صص 384-404. [ Google Scholar ]
- زلر، کالیفرنیا؛ جنینگز، MK; ویکرز، TW; ارنست، HB; کوشمن، SA; Boyce، WM آیا همه انواع داده ها و مدل های اتصال برابر هستند؟ اعتبارسنجی رویکردهای اتصال رایج با داده های پراکندگی غواصان. توزیع کنید. 2018 ، 24 ، 868-879. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- زلر، کالیفرنیا؛ مک گریگال، ک. Whiteley، AR برآورد مقاومت منظره در برابر حرکت: یک بررسی. Landsc. Ecol. 2012 ، 27 ، 777-797. [ Google Scholar ] [ CrossRef ]
- الیوت، NB; کوشمن، SA; مک دونالد، DW; لاوریج، ایجی شیطان در پراکندهها است: پیشبینیهای ارتباط چشمانداز با جمعیتشناسی تغییر میکند. J. Appl. Ecol. 2014 ، 51 ، 1169-1178. [ Google Scholar ] [ CrossRef ]
- McRae، BH; دیکسون، بی جی; کیت، تی. شاه، VB با استفاده از نظریه مدار برای مدل سازی اتصال در بوم شناسی، تکامل و حفاظت. اکولوژی 2008 ، 89 ، 2712-2724. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- آدریانسن، اف. شاردون، جی. دی بلوست، جی. سوئینن، ای. ویلالبا، اس. گولینک، اچ. ماتیسن، ای. کاربرد مدلسازی کمهزینه به عنوان یک مدل منظر عملکردی. Landsc. طرح شهری. 2003 ، 64 ، 233-247. [ Google Scholar ] [ CrossRef ]
- کوشمن، SA; McKelvey، KS; شوارتز، MK استفاده از مدلهای منبع-مقصد مشتق شده تجربی برای نقشه راهروهای حفاظتی منطقهای. حفظ کنید. Biol. 2009 ، 23 ، 368-376. [ Google Scholar ] [ CrossRef ]
- لندگوث، ای. دست، بی. گلسی، جی. کوشمن، اس. Sawaya, M. UNICOR: شبیهساز شبکه ارتباطی و راهروی گونهها. اکوگرافی 2012 ، 35 ، 9-14. [ Google Scholar ] [ CrossRef ]
- Moilanen، A. در مورد محدودیت های اتصال نظری گراف در بوم شناسی و حفاظت فضایی. J. Appl. Ecol. 2011 ، 48 ، 1543-1547. [ Google Scholar ] [ CrossRef ]
- Compton، BW; مک گریگال، ک. کوشمن، SA; Gamble، LR یک مدل اتصال هسته مقاوم برای دوزیستان که در استخرهای بهاری تولید مثل می کنند. حفظ کنید. Biol. 2007 ، 21 ، 788-799. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- درای، اس. رویر-کارنزی، ام. Calenge، C. تحلیل اکتشافی خودهمبستگی در مطالعات حرکت حیوانات. Ecol. Res. 2010 ، 25 ، 673-681. [ Google Scholar ] [ CrossRef ]
- کوشمن، SA; چیس، م. گریفین، سی فیل ها در فضا و زمان. Oikos 2005 ، 109 ، 331-341. [ Google Scholar ] [ CrossRef ]
- Wiens, JA مقیاس بندی فضایی در اکولوژی. کارکرد. Ecol. 1989 ، 3 ، 385-397. [ Google Scholar ] [ CrossRef ]
- اوسیپووا، ال. اوکلو، ام. نجومبی، س. Ngene، S. وسترن، دی. هیوارد، ام. بالکنهول، N. استفاده از توابع انتخاب مرحلهای برای مدلسازی اتصال منظره برای فیلهای آفریقایی: محاسبه تنوع در افراد و فصول. انیمیشن. حفظ کنید. 2019 ، 22 ، 35-48. [ Google Scholar ] [ CrossRef ]
- Kaszta، Ż. کوشمن، SA; Slotow، R. غیر ایستایی زمانی مدلهای حرکت انتخاب مسیر و اتصال: نمونهای از فیلهای آفریقایی در پارک ملی کروگر. جلو. Ecol. تکامل. 2021 ، 9 ، 207. [ Google Scholar ] [ CrossRef ]
- گورینی، ال. لینل، جی دی؛ می، آر. پانزاکی، ام. بویتانی، ل. اودن، م. نیلسن، ناهمگونی زیستگاه EB و تعاملات شکارچی و طعمه پستانداران. Mammal Rev. 2012 ، 42 ، 55-77. [ Google Scholar ] [ CrossRef ]
- DeAngelis، DL; Mooij، WM مدلسازی فردی فرآیندهای اکولوژیکی و تکاملی. آنو. کشیش اکول. تکامل. سیستم 2005 ، 36 ، 147-168. [ Google Scholar ] [ CrossRef ]
- کاریوا، پ. Shigesada، N. تجزیه و تحلیل حرکت حشرات به عنوان یک راه رفتن تصادفی همبسته. Oecologia 1983 ، 56 ، 234-238. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- شوماکر، NH استفاده از شاخص های چشم انداز برای پیش بینی اتصال زیستگاه. اکولوژی 1996 ، 77 ، 1210-1225. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هارگرو، دبلیو دبلیو. هافمن، اف.ام. افرویمسون، RA یک ابزار تحلیل نقشه عملی برای تشخیص راهروهای پراکندگی بالقوه. Landsc. Ecol. 2005 ، 20 ، 361-373. [ Google Scholar ] [ CrossRef ]
- شوماکر، NH; بروکس، A. HexSim: یک محیط مدل سازی برای بوم شناسی و حفاظت. Landsc. Ecol. 2018 ، 33 ، 197-211. [ Google Scholar ] [ CrossRef ]
- بوسیدی، جی. پالمر، SC; مالچو، AK; زورل، دی. واتس، ک. تراویس، JM RangeShifter 2.0: یک پلتفرم توسعه یافته و پیشرفته برای مدلسازی پویاییهای زیست محیطی تکاملی فضایی و پاسخهای گونهها به تغییرات محیطی. اکوگرافی 2021 ، 44 ، 1453-1462. [ Google Scholar ] [ CrossRef ]
- شوماکر، NH; بروکس، ا. دانک، جی آر. وودبریج، بی. هاینریش، جی. لاولر، جی جی. کارول، سی. LaPlante، D. نقشه برداری از منابع، سینک ها و اتصالات با استفاده از مدل شبیه سازی جغدهای خالدار شمالی. Landsc. Ecol. 2014 ، 29 ، 579-592. [ Google Scholar ] [ CrossRef ]
- هنری، RC; پالمر، SC; واتس، ک. میچل، RJ; اتکینسون، ن. تراویس، JM اثرات از دست دادن درخت بر اتصال اکولوژیکی: در حال توسعه مدلهایی برای ارزیابی Ecol. به اطلاع رساندن. 2017 ، 42 ، 90-99. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- جلتش، اف. بونته، دی. پیر، جی. رینکینگ، بی. لیمگروبر، پی. بالکنهول، ن. شرودر، بی. بوخمن، سی ام. مولر، تی. بلاوم، ن. و همکاران ادغام بوم شناسی حرکت با تحقیقات تنوع زیستی-کاوش راه های جدید برای پرداختن به پویایی تنوع زیستی مکانی-زمانی. حرکت Ecol. 2013 ، 1 ، 1-13. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- یونیتان کومار، اس. کوشمن، SA مدلسازی اتصال در علم حفاظت: ارزیابی مقایسهای. 2022; در دست بررسی . [ Google Scholar ]
- Landguth، EL; Cushman، SA CDPOP: یک برنامه ژنتیکی جمعیت از راه دور هزینه های فضایی صریح. مول. Ecol. منبع. 2010 ، 10 ، 156-161. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Landguth، EL; کوشمن، SA; شوارتز، MK; McKelvey، KS; مورفی، ام. Luikart، G. کمی کردن زمان تاخیر برای شناسایی موانع در ژنتیک منظر. مول. Ecol. 2010 ، 19 ، 4179-4191. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- شرک، عج; Landguth، EL; Cushman، SA مقایسه روش های رگرسیون برای انتخاب مدل در تجزیه و تحلیل ژنتیکی چشم انداز فردی. مول. Ecol. منبع. 2018 ، 18 ، 55-67. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Mantel، N. تشخیص خوشه بندی بیماری و یک رویکرد رگرسیون تعمیم یافته. سرطان Res. 1967 ، 27 ، 209-220. [ Google Scholar ]
- ویرتانن، پی. گومرز، آر. Oliphant، TE; هابرل، ام. ردی، تی. کورناپو، دی. بوروسکی، ای. پترسون، پی. وکسر، دبلیو. برایت، جی. و همکاران SciPy 1.0: الگوریتم های اساسی برای محاسبات علمی در پایتون. نات روشها 2020 ، 17 ، 261-272. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- پدرگوسا، اف. واروکو، جی. گرامفورت، آ. میشل، وی. تیریون، بی. گریزل، او. بلوندل، م. پرتنهوفر، پی. ویس، آر. دوبورگ، وی. و همکاران Scikit-learn: یادگیری ماشینی در پایتون. جی. ماخ. فرا گرفتن. Res. 2011 ، 12 ، 2825-2830. [ Google Scholar ]
- کوشمن، SA; همبستگی و استنتاج لاندگوث، EL جعلی در ژنتیک منظر. مول. Ecol. 2010 ، 19 ، 3592-3602. [ Google Scholar ] [ CrossRef ]
- کوشمن، SA; شرک، عج; Landguth، EL جداسازی اثرات منطقه زیستگاه، تکه تکه شدن و مقاومت ماتریکس بر تمایز ژنتیکی در مناظر پیچیده. Landsc. Ecol. 2012 ، 27 ، 369-380. [ Google Scholar ] [ CrossRef ]
- استرونن، AV; شوماکر، NH; فوربس، جی جی; Paquet، PC; بروک، RK مقاومت چشمانداز در برابر پراکندگی: شبیهسازی اثرات طولانیمدت اختلال انسانی بر روی یک جمعیت گرگ کوچک و منزوی در جنوب غربی منیتوبا، کانادا. محیط زیست نظارت کنید. ارزیابی کنید. 2012 ، 184 ، 6923-6934. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هاینریش، جی. لاولر، جی جی. شوماکر، NH محرک های درونی و بیرونی دینامیک منبع-سینک. Ecol. تکامل. 2016 ، 6 ، 892-904. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- وبستر، ام اس؛ Marra, PP; هیگ، اس ام. بنش، اس. هلمز، RT اهمیت درک اتصال مهاجرت و تعاملات فصلی. Trends Ecol. تکامل. 2002 ، 17 ، 76-83. [ Google Scholar ] [ CrossRef ]
- اینگولد، تی. موقتی منظر. باستان شناسی جهانی 1993 ، 25 ، 152-174. [ Google Scholar ] [ CrossRef ]
- کوشمن، اس. رافائل، م. روجیرو، ال. شرک، ع. واسرمن، تی. O’Doherty، E. عوامل محدود کننده و اتصال چشم انداز: مارتین آمریکایی در کوه های راکی. Landsc. Ecol. 2011 ، 26 ، 1137-1149. [ Google Scholar ] [ CrossRef ]
- Wan، HY; مک گریگال، ک. گانی، جی ال. لورت، وی. تیم، BC; Cushman, SA متا همانندسازی، عدم ایستایی را در انتخاب زیستگاه چند مقیاسی جغد خالدار مکزیکی نشان می دهد. کندور اورنیتول. Appl. 2017 ، 119 ، 641-658. [ Google Scholar ] [ CrossRef ]
- ورگارا، م. کوشمن، SA; Ruiz-González، A. تفاوت های اکولوژیکی و عوامل محدود کننده در زمینه های مختلف منطقه ای: ژنتیک چشم انداز ماتن سنگی در شبه جزیره ایبری. Landsc. Ecol. 2017 ، 32 ، 1269-1283. [ Google Scholar ] [ CrossRef ]
- Cushman، SA فضا و زمان در اکولوژی: سر و صدا یا محرک اساسی؟ در پیچیدگی فضایی، انفورماتیک، و حفاظت از حیات وحش ؛ Springer: برلین/هایدلبرگ، آلمان، 2010; صص 19-41. [ Google Scholar ]
- زلر، کالیفرنیا؛ لوسیون، آر. فلچر، RJ; Tulbure، MG; جنینگز، MK درک اهمیت اتصال چشم انداز پویا. Land 2020 , 9 , 303. [ Google Scholar ] [ CrossRef ]
- بنت، نیوجرسی؛ راث، آر. کلاین، SC; چان، ک. کریستی، پی. کلارک، دی. کولمن، جی. کوران، دی. دوربین، تی جی; اپستاین، جی. و همکاران علوم اجتماعی حفاظت: درک و ادغام ابعاد انسانی برای بهبود حفاظت Biol. حفظ کنید. 2017 ، 205 ، 93-108. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- Kaszta، Ż. کوشمن، SA; هرن، ای جی. برنهام، دی. مک دونالد، EA; گوسنز، بی. ناتان، SK; Macdonald، DW ادغام حفاظت از پلنگ ابری ساندا (Neofelis diardi) در برنامه ریزی توسعه و بازسازی در صباح (بورنئو). Biol. حفظ کنید. 2019 ، 235 ، 63-76. [ Google Scholar ] [ CrossRef ]
- بنسون، ES Movement Ecology and the Minimal Animal. LA+ 2016 ، 30–33. [ Google Scholar ]
- پولی، اس. باروا، م. بینارت، دبلیو. دیکمن، ا. هولمز، جی. لوریمر، جی. لاوریج، ای جی؛ مک دونالد، DW; ماروین، جی. ردپات، اس. و همکاران بررسی میان رشته ای رویکردهای فعلی و آینده برای بهبود روابط انسان و شکارچی حفظ کنید. Biol. 2017 ، 31 ، 513-523. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- پترسون، MN; Birckhead، JL; لئونگ، ک. پترسون، ام جی; پترسون، TR بازگویی افسانه درگیری انسان و حیات وحش. حفظ کنید. Lett. 2010 ، 3 ، 74-82. [ Google Scholar ] [ CrossRef ]
- بنسون، ES حداقل حیوان: نظارت، شبیهسازی و تصادفی بودن در زیستشناسی حیات وحش. Antennae 2014 ، 30 ، 39-53. [ Google Scholar ]
- Barua، M. Bio-geo-graphy: چشم انداز، مسکن، و بوم شناسی سیاسی روابط انسان و فیل. محیط زیست طرح. D Soc. فضا 2014 ، 32 ، 915-934. [ Google Scholar ] [ CrossRef ]
- سالمون، ای. بوم شناسی هم محور: ادراکات بومی از رابطه انسان و طبیعت. Ecol. Appl. 2000 ، 10 ، 1327-1332. [ Google Scholar ]
- ناتان، آر. Getz، WM; ریویلا، ای. هولیوک، ام. کادمون، ر. سالتز، دی. Smouse، PE یک پارادایم بوم شناسی جنبش برای یکپارچه سازی تحقیقات حرکت ارگانیسمی. Proc. Natl. آکادمی علمی ایالات متحده آمریکا 2008 ، 105 ، 19052-19059. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- کوک، اس جی; Blumstein، DT; بوکهلز، آر. کارو، تی. فرناندز-ژوریسیچ، ای. فرانکلین، CE; متکالف، جی. اوکانر، سی ام. سنت کلر، سی سی; ساترلند، WJ; و همکاران فیزیولوژی، رفتار و حفاظت. فیزیول. بیوشیمی. زول. 2014 ، 87 ، 1-14. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- لوریمر، جی. کاریزمای غیرانسانی. محیط زیست طرح. D Soc. فضا 2007 ، 25 ، 911-932. [ Google Scholar ] [ CrossRef ]
- اینگولد، تی. جوینده و مرد اقتصادی بهینه. در طبیعت و جامعه ; Routledge: Abingdon-on-Thames، انگلستان، 2003; صص 35-54. [ Google Scholar ]
- سکار، ن. شیلر، دی. با حمایت از حیوانات درگیر باشید. Science 2020 , 369 , 629-630. [ Google Scholar ] [ CrossRef ]
- Paquet، PC; Darimont، CT حفاظت از حیات وحش و رفاه حیوانات: دو روی یک سکه. انیمیشن. ولف 2010 ، 19 ، 177-190. [ Google Scholar ]
- والاچ، AD; بکوف، م. باتاویا، سی. نلسون، نماینده مجلس؛ Ramp, D. احضار شفقت برای رسیدگی به چالش های حفاظت. حفظ کنید. Biol. 2018 ، 32 ، 1255-1265. [ Google Scholar ] [ CrossRef ]
- Parreñas، JS Decolonizing Extinction ; انتشارات دانشگاه دوک: دورهام، NC، ایالات متحده آمریکا، 2018. [ Google Scholar ]
- کوک، اس جی; O’Connor، CM ساخت فیزیولوژی حفاظت مربوط به سیاست گذاران و پزشکان حفاظت. حفظ کنید. Lett. 2010 ، 3 ، 159-166. [ Google Scholar ] [ CrossRef ]
- هاجتس، تی. لوریمر، جی. روششناسی برای جغرافیای حیوانات: فرهنگها، ارتباطات و ژنومیک. فرقه Geogr. 2015 ، 22 ، 285-295. [ Google Scholar ] [ CrossRef ]
- Hodgetts, T. اتصال به عنوان یک مضرب: در، با و به عنوان “طبیعت”. منطقه 2018 ، 50 ، 83–90. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- Bunnefeld، N. نیکلسون، ای. میلنر-گولاند، EJ تصمیم گیری در حفاظت و مدیریت منابع طبیعی: مدل هایی برای رویکردهای بین رشته ای . انتشارات دانشگاه کمبریج: کمبریج، انگلستان، 2017; جلد 22. [ Google Scholar ]
- یونیتان کومار، اس. Maini، PK؛ چیاورینی، ال. هرن، ای جی. مک دونالد، DW; Kaszta، Ż. Cushman، SA هموارسازی و منیفولد محیطی. Ecol. به اطلاع رساندن. 2021 ، 66 ، 101472. [ Google Scholar ] [ CrossRef ]
- Kimmerer, R. Braiding Sweetgrass: Indigenous Wisdom, Scientific Knowledge and the Teachings of Plants ; Milkweed Editions: Minneapolis, MN, USA, 2013. [ Google Scholar ]
- برکس، ف. اکولوژی مقدس . Routledge: Abingdon-on-Thames، UK، 2017. [ Google Scholar ] [ CrossRef ]
- اینگولد، تی. بازاندیشی در اندیشه جاندار و جان بخش. Ethnos 2006 ، 71 ، 9-20. [ Google Scholar ] [ CrossRef ]
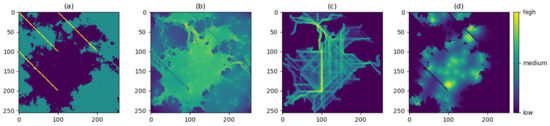
شکل 1. تصاویر سه مدل اتصال – CircuitScape ( b )، مسیرهای کمهزینه فاکتوریل ( c )، و هستههای مقاوم ( d ) – اعمال شده بر روی سطح مقاومت ( a ). برای سطح مقاومت، رنگهای پسزمینه آبی، سبز و زرد به ترتیب مقادیر مقاومت کم، متوسط و زیاد را نشان میدهند. برای سه نقشه اتصال، رنگ های پس زمینه آبی، سبز و زرد به ترتیب نشان دهنده اتصال کم، متوسط و زیاد هستند.
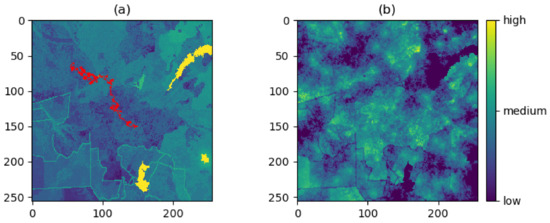
شکل 2. ( الف ) یک نمونه مسیر منفرد را با رنگ قرمز روی سطح مقاومت مورد استفاده برای مطالعه در [ 18 ] نشان می دهد و ( ب ) یک نقشه اتصال را نشان می دهد که با تجمیع 100 مسیر از 100 مکان منبع مختلف تولید شده است. ساخته شده با استفاده از Pathwalker.
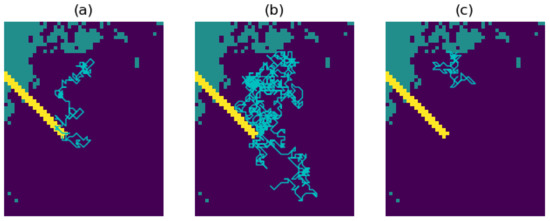
شکل 3. مسیرهایی با حداکثر طول 1000 پله، با استفاده از مکانیسم های انرژی ( a )، جاذبه ( b )، و خطر ( c )، شبیه سازی شده بر روی سطح مقاومت از شکل 1 . توجه کنید که چگونه مکانیسم جذب از مناطق با مقاومت بالاتر جلوگیری می کند. رنگهای پسزمینه آبی، سبز و زرد به ترتیب مقادیر مقاومت کم (1)، متوسط (50) و بالا (100) را نشان میدهند.
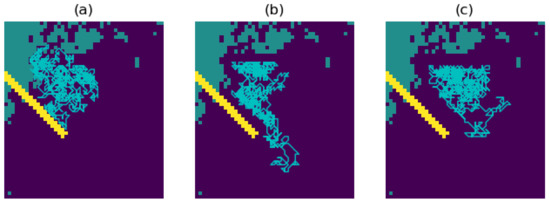
شکل 4. مسیرهایی به طول 1000 پله با مکانیسم جذب. آنها با اندازه پنجره 1 در 1 ( a )، 5 در 5 ( b ) و 9 در 9 ( c ) با استفاده از تابع مقیاس بندی میانگین کانونی پارامتر می شوند. رنگهای پسزمینه آبی، سبز و زرد به ترتیب مقادیر مقاومت کم (1)، متوسط (50) و بالا (100) را نشان میدهند. توجه داشته باشید که چگونه با افزایش مقیاس، مسیرها از مناطق با مقاومت بالا با فاصله بیشتر اجتناب می کنند.
شکل 5. در ( a )، هیچ جهتی استفاده نشده است، بنابراین C و D هر دو برابر 0 هستند. در ( b )، ما 0.7 خودهمبستگی و 0 بایاس مقصد داریم. توجه کنید که چگونه در بسیاری از قسمت های مسیر، واکر در همان مسیر حرکت خود را ادامه داده است. در ( c )، ما 0 همبستگی خودکار و 0.2 سوگیری مقصد داریم. توجه کنید که چگونه جهت کلی مسیر از نقطه مبدا (نزدیک پایین تصویر) به نقطه مقصد مشخص شده (نزدیک بالای تصویر) منتهی می شود. رنگهای پسزمینه آبی، سبز و زرد به ترتیب مقادیر مقاومت کم (1)، متوسط (50) و بالا (100) را نشان میدهند.
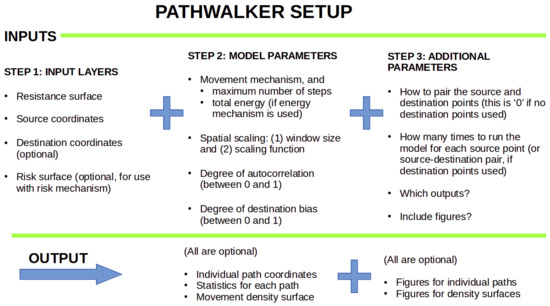
شکل 6. شماتیک برای پیکربندی Pathwalker.
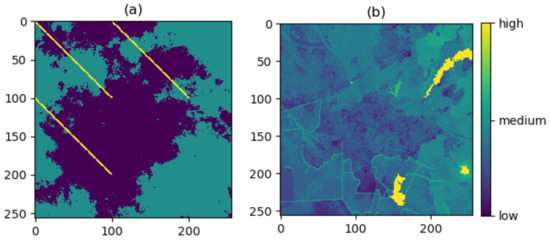
شکل 7. دو سطح مقاومت مورد استفاده در مطالعه موردی: ( الف ) سطح مقاومت شبیه سازی شده (فقط مقادیر 1، 50 و 100 را در نظر می گیرد). و ( ب )، سطح مقاومت تجربی مورد استفاده برای مطالعه در [ 18 ].
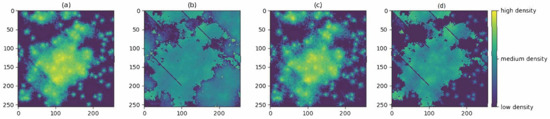
شکل 8. چهار سطح چگالی تولید شده از چهار مکانیسم حرکتی مختلف – انرژی ( a )، جاذبه ( b )، ریسک ( c )، و ترکیب سه طرفه آنها ( d ) – با سه پارامتر دیگر در مقادیر پیشفرض خود حفظ میشوند.
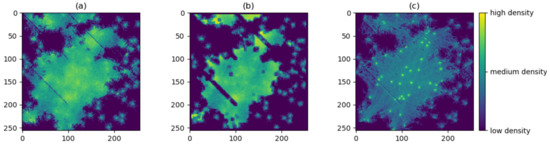
شکل 9. سه سطح چگالی تولید شده با مکانیسم حرکت ترکیبی سه طرفه، هر کدام با یکی از سه پارامتر دیگر افزایش یافته است: 0.35 خود همبستگی ( a )، مقیاس بندی فضایی 7 در 7 ( b )، و 0.35 بایاس مقصد ( c ).


بدون دیدگاه