1. مقدمه
واقعیت مجازی (VR) در یک محیط آموزشی، یادگیری غیرفعالی را که دانشآموزان اغلب در کلاس تجربه میکنند، کاهش میدهد. در عوض، دانشآموزانی که از VR استفاده میکنند در یادگیری فعال شرکت میکنند که فراگیرتر و جذابتر است [ 1 ]. VR می تواند برای مقابله با چالش های عملی در آموزش، مانند سایت های غیرقابل دسترس فیزیکی، محدودیت های ناشی از مسئولیت یا خطرات، و هزینه های بالای مربوط به بازدید از سایت مورد استفاده قرار گیرد [ 2 ]. واقعیت مجازی در اوایل دهه 1980 به عنوان یک ابزار آموزشی و آموزشی مورد استفاده قرار گرفته است (به عنوان مثال، شبیه سازی پرواز) [ 3 ، 4 ]]. در آموزش عالی، VR در دهه 1990 معرفی شد. با این حال، محدودیتهایی مانند هزینه خرید و نگهداری بالا، ناراحتی فیزیکی و روانی کاربران، و طراحی ضعیف محیط مجازی دلایل اصلی منع انتشار گسترده بودند [ 4 ]. کاهش هزینه کامپیوتر و سختافزار واقعیت مجازی، افزایش قدرت کامپیوتر و گرافیکهای کامپیوتری واقعگرایانه باعث افزایش سریع فناوری مجازی مبتنی بر دسکتاپ در آموزش شد. با این حال، یک اشکال عمده برنامه های سنتی سطح پایین غوطه وری است زیرا کاربر با محیط مجازی از طریق یک مانیتور کامپیوتر استاندارد، ماوس و صفحه کلید در تعامل است. این امر حضور، تجربه و تعامل کاربر را محدود می کند [ 5]. چندین مطالعه برای اهداف مختلف، مانند آموزش ارتش ایالات متحده، پزشکی، مهندسی، و آموزش ابتدایی، نشان داده اند که VR همهجانبه منجر به افزایش یادگیری می شود [ 6 ، 7 ، 8 ، 9 ]. علاوه بر این، پاتل و همکاران. [ 10 ] دریافتند که در کارهای فیزیکی، شرکت کنندگان در VR فراگیر بیشتر از استفاده از سیستم های ویدئویی دوبعدی یاد می گیرند. در مقابل، سایر مطالعات نشان دادند که VR غوطه ور تأثیر قابل توجهی بر یادگیری ندارد [ 11 ، 12 ]. Immersive VR مزیت قابل توجهی نسبت به سیستم های مبتنی بر دسکتاپ در هنگام آموزش موضوعاتی دارد که نیاز به استدلال خاص دارند [ 13 ، 14 ، 15 ، 16 .]. دو نوع اصلی VR همهجانبه عبارتند از (i) محیط های مجازی خودکار غار، که در آن دیوارهای اتاق با نمایشگر پوشانده شده است و کاربر از عینک های سه بعدی استفاده می کند. و (ii) نمایشگرهای روی سر (HMD)، که در آن کاربر یک دستگاه نمایشگر برای دیدن محیط مجازی می پوشد و کنترلرها یا دستکش ها را برای تعامل با آن لمس می کند. هزینه بالای اولی استفاده گسترده از آن را ممنوع می کند [ 2 ]. تنها در سالهای اخیر، از زمان تأسیس Oculus در سال 2012، دسترسی گسترده VR با کاهش قیمت زیاد و بهبود تجربه کاربری امکانپذیر شده است. این فرصت را برای کاربرد در آموزش مهندسی و رشته های مرتبط ایجاد کرده است. به عنوان مثال، VR همهجانبه از طراحی مهندسی پشتیبانی می کند [ 17] در مهندسی ساخت و ساز. VR برای تجسم، آموزش ایمنی، آموزش استفاده از تجهیزاتی مانند جرثقیل [ 18 ]، تجسم و ارزیابی خطرات زمین [ 19 ]، شبیه سازی موتورخانه دریایی برای آموزش مهندسان دریایی [ 20 ] و آموزش برای مبتدیان در مورد استفاده شده است. محافظ تشعشع در مهندسی هسته ای [ 21 ]. علاوه بر این، VR همهجانبه کاربردهایی در جغرافیا، علوم زمین و علوم فضایی پیدا کرده است [ 22 ، 23 ]. برخی از نمونههای اخیر شامل استفاده از VR برای انجام سفرهای میدانی مجازی به مکانهای رخنمون و اندازهگیری ویژگیهای سنگ (به عنوان مثال، ضخامت یا لایههای سنگ) است [ 24 , 25 ]]، مطالعه سیستم داخلی آتشفشان ها [ 26 ]، و یک بازی جدی از یک پایه ماه برای ایجاد انگیزه و حمایت از تحقیقات فضایی [ 27 ].
اجرای مجازی قبلی وظایف نقشه برداری مبتنی بر دسکتاپ بود [ 28 ، 29 ، 30 ، 31 ]. به عنوان مثال، دیب و همکاران. [ 28 ] یک آزمایشگاه تسطیح تفاضلی در VR مبتنی بر دسکتاپ ایجاد کرد تا به درک دانشآموز از مفاهیم و شیوهها کمک کند. تسطیح دیفرانسیل فرآیند یافتن اختلاف ارتفاع بین نقاط است [ 32]. از این روش می توان برای ایجاد نقاط کنترل عمودی جدید در نقشه برداری استفاده کرد. نویسندگان دریافتند که محیطهای یادگیری مجازی به دانش بیانی و رویهای دانشآموزان کمک میکند، که پتانسیل بالایی از فناوری VR برای بررسی آموزش مهندسی را نشان میدهد. با این حال، پاسخهای دانشآموز به سؤالات باز محدودیت واقعیت مجازی غیرقابل نفوذ را آشکار میکند، زیرا دانشآموزان دریافتند که ناوبری در حرکت پرواز دشوار است و آنها ترجیح میدهند دوربینی که در سطح چشم کاراکتر وصل شده باشد [ 28 ]. یکی دیگر از تلاشهای مبتنی بر دسکتاپ SimuSurvey و SimuSurvey X بود که توسط [ 29 ، 30 ، توسعه یافتند. 31 توسعه یافتند.] که دستکاری ابزارهای نقشه برداری را شبیه سازی می کند. علاوه بر این، نرم افزار خطاهای ابزار و تعامل آنها را شبیه سازی کرد، که به درک دانش آموزان از عملکرد ابزار و رفتار نامنظم سیستماتیک کمک کرد [ 33 ]. ارزیابی نرم افزار در آموزش پیمایشی بهبود عملکرد تحصیلی دانش آموزان را نشان داد [ 34 ]. با این حال، برخی از محدودیت های شناسایی شده ناتوانی در خواندن داده های اندازه گیری شده و تصمیم گیری در مورد روش های نقشه برداری در یک محیط 3 بعدی که شامل محدودیت های زمین است [ 34 ] بود.]. علاوه بر این، محیط مبتنی بر دسکتاپ چالش هایی را در عملکرد ابزار و تغییر زاویه دید ایجاد کرد. این به این دلیل است که محیط های مبتنی بر دسکتاپ نمی توانند حرکت دست و عملکرد ابزار واقعی را تقلید کنند. کاربر برای پیمایش در محیط مجازی نیاز به جابجایی بین چندین دیدگاه دارد. این غیر طبیعی و دست و پا گیر است و واقع گرایی و غوطه ور شدن آزمایشگاه مجازی را کاهش می دهد. سایر تلاشهای سادهتر شامل نرمافزار برای آموزش دانشآموزان در مورد نحوه خواندن میله تراز [ 35 ] و انتخاب نقطه کنترل برای مدلسازی زمین [ 36 ] است.]. در مهندسی نقشه برداری، دانشجویان باید از ابزارهای پیچیده با اجزای متعدد استفاده کنند. این وظایف به هماهنگی دست و چشم و همچنین آگاهی فضایی سه بعدی نیاز دارند. مثالهای بالا محدودیتهای پیادهسازی مبتنی بر دسکتاپ VR و نیاز به حرکت به سمت پیادهسازیهای همهجانبه برای ایجاد حس طبیعتگرایی در جهتیابی و حرکت را نشان میدهند. Immersive VR به تازگی راه خود را در مهندسی نقشه برداری پیدا کرده است [ 37 ، 38 ، 39 ]. بولکاس و چیامپی [ 37] پیشنهاد کرد که آزمایشگاههای واقعیت مجازی همهجانبه را میتوان برای رسیدگی به چالشهای سال اول آموزش مهندسی نقشهبرداری مربوط به لغو آزمایشگاههای فضای باز در نتیجه آب و هوا (باران و برف) و ناتوانی در انجام آزمایشگاهها در زمینها و مکانهای مختلف (مثلاً زمینهای مختلف) استفاده کرد. ، شهرها و سایت های ساختمانی). همه گیر کروناویروس اخیر، دانشگاه ها را به سمت یادگیری از راه دور سوق می دهد، اما درها را برای اجرای روش های جدید یادگیری از راه دور باز می کند. با این حال، هنوز موانع مهمی در رابطه با هزینه سخت افزار وجود دارد که امکان استفاده گسترده از VR همهجانبه برای یادگیری از راه دور را فراهم می کند. بنابراین، VR مبتنی بر دسکتاپ هنوز هم مناسبترین پلتفرم برای اهداف یادگیری از راه دور آزمایشگاههای نقشهبرداری است. اولین نتایج در Bolkas و همکاران. [ 38] یک آزمایشگاه تسطیح همهجانبه و تعاملی (حلقه تسطیح) امیدوار کننده بود، اما علیرغم نکات مثبت، اشکالات اصلی VR همهجانبه علائم تهوع و سرگیجه برای کاربران مبتدی است. اثر آنها با گذشت زمان کاهش می یابد. لوین و همکاران [ 39 ] نمونه دیگری از اجرای VR همهجانبه در نقشه برداری است. نویسندگان یک تمرین توپوگرافی برای ایجاد خطوط در یک زمین شبیه سازی شده با پیچیدگی های مختلف ایجاد کردند. خطوط ایجاد شده توسط دانش آموزان با موارد مرجع مقایسه شد و جنبه های عملی مدل سازی زمین را نشان داد. مثال آنها ارزش VR را برای رسیدگی به چالش های آموزشی نشان می دهد. با این حال، پیادهسازی ساده بود و چندین بخش مهم از کار میدانی، مانند وسط سهپایه، کار با پیچهای سهپایه، و تراز کردن ابزار را از دست داد.
برای پرداختن به این چالشهای آموزشی، ما یک راهحل نرمافزار واقعیت مجازی به نام SurReal – بررسی واقعیت ایجاد کردهایم. این نرم افزار آزمایشگاه های نقشه برداری را در یک محیط مجازی فراگیر و تعاملی شبیه سازی می کند. این برنامه با درجه بالایی از وفاداری، یک ابزار سطح دیفرانسیل را تکرار می کند، اما می تواند ابزارهای اضافی، انواع زمین ها را نیز در خود جای دهد و می تواند در انواع سناریوهای نقشه برداری مورد استفاده قرار گیرد.
این مقاله بر جنبههای فنی نرمافزار تمرکز دارد و هدف اصلی ارائه و بحث در مورد ویژگیهای اصلی نرمافزار، چالشهای مواجه شده و روشهای توسعهیافته برای غلبه بر آنها است. نکته قابل توجه تکنیک جدید ما است که برای موقعیت یابی اجسام پیچیده (مانند سه پایه) روی سطوح پیچیده در VR با بار محاسباتی کم توسعه یافته است. با افزایش پیچیدگی شبیهسازیها و بازیها، اشیاء پیچیده همیشه در حال حاضر شدن هستند. بنابراین، حفظ بار محاسباتی کم که بر عملکرد شبیهسازی مجازی تأثیری نخواهد داشت، مهم است. این مقاله در بخش های جداگانه مربوط به ویژگی های اصلی نرم افزار ساختار یافته است. سپس ما نمایشهایی از آزمایشگاههای تسطیح دیفرانسیل مجازی خود ارائه میکنیم، به عنوان مثال، یک حلقه تسطیح سه معیار و یک خط تسطیح نقطه به نقطه.
2. مواد و روشها
2.1. پلتفرم توسعه، سخت افزار و رابط کاربری
این نرم افزار با استفاده از روش توسعه نرم افزار چابک در حال توسعه است. ویژگیها و باگها از طریق Microsoft Planner ردیابی میشوند و وظایف در طول جلسات مکرر اسکرام توزیع میشوند. یک مخزن کد خصوصی GitHub توسعه و نسخه سازی را تسهیل می کند. ویژگیهای جدید قبل از ادغام در Master پس از گذراندن تست در شاخهها توسعه مییابد. تست آلفا به طور معمول توسط اعضای تیم انجام می شود. سپس مسائل و تغییرات قبل از رسیدگی به جلسه اسکرام بعدی به Microsoft Planner اضافه می شوند. گاهی اوقات، دانش آموزان نظرسنجی، خارج از پروژه، از نرم افزار استفاده می کنند و به عنوان یک آزمون بتا در مقیاس کوچک عمل می کنند. این متدولوژی به ما اجازه می دهد تا به سرعت تغییرات را پیاده سازی کنیم و نرم افزار را بهبود دهیم.
برای انتخاب پلتفرم توسعه، موتور بازی Unity را با موتور بازی سازی Unreal مقایسه کردیم. هر دو موتور بازی از توسعه VR پشتیبانی می کنند و مجموعه ویژگی های مشابهی دارند. Unity از C# و Unreal از C++ استفاده می کند. اگرچه هر دو زبان مشابه هستند، اما C# مزایای قابل توجهی داشت، مانند امکان تکرار سریعتر و یادگیری آسانتر. علاوه بر این، Unity 3D جامعه توسعه فعال تری دارد، زیرا محبوب ترین موتور بازی برای برنامه های آموزشی و آموزشی VR است. 40 ]]. با توجه به سخت افزار، ما Oculus Rift و HTC Vive را در نظر گرفتیم. قیمت بین Oculus Rift و HTC Vive مشابه بود. ما پس از بررسی هر دو کیت توسعه نرم افزار (SDK)، بررسی مستندات و اجرای آزمایشی با هر دو دستگاه، در مورد Oculus Rift تصمیم گرفتیم. سیستم مورد نیاز نرم افزار بر اساس سیستم مورد نیاز Oculus Rift است که در [ 41 ] یافت می شود.
تعامل با اشیاء مجازی را می توان به دو دسته تقسیم کرد: (i) انتخاب و (ب) گرفتن. تعامل از طریق کنترل کننده ها کنترل می شود ( شکل 1 ).
گرفتن : اینجا جایی است که کاربر می تواند با دراز کردن دست، نگه داشتن و انداختن آن در موقعیت جدید، جسم را به صورت فیزیکی بگیرد. این تعامل بسیار شهودی است و حتی برای کاربران جدیدی که تجربه ای در VR ندارند نیز روان است ( شکل 1 را ببینید ).
انتخاب: در دنیای واقعی، نقشه برداران باید پایه های سه پایه، پیچ ها و دستگیره ها را با انجام حرکات ظریف با انگشتان خود تنظیم کنند. شبیه سازی چنین حرکاتی در VR به دلیل محدودیت های ردیابی دشوار است. بنابراین، یک روش انتخاب و منو ایجاد شد. Oculus شکل بسیار ابتدایی کنترل رابط کاربری (UI) را ارائه می دهد. بنابراین، ما یک سیستم UI سفارشی برای کار یکپارچه در VR ایجاد کردیم. این سیستم از یک اشاره گر برای انتخاب عناصر UI و تعامل با آنها استفاده می کند. با یک قطعه اصلی تجهیزات، کل شیء بدون توجه به قسمتی که کاربر انتخاب می کند، انتخاب می شود. با اشیاء پیچیده تر، که به اجزای جداگانه تقسیم می شوند، کاربر می تواند آنها را انتخاب کرده و به طور جداگانه با آنها تعامل داشته باشد. هنگامی که کاربر یک شی را انتخاب می کند، یک منو برای آن شی ظاهر می شود.
در منوی اصلی تبلت مجازی ( شکل 2 الف)، کاربر میتواند به عملکردهای نرمافزاری اساسی که برای آزمایشگاههای مجازی مفید است دسترسی داشته باشد: علامتگذاری موقعیت، که یک نقطه موقت را کاهش میدهد. گام شمار را برای شمارش سرعت باز کنید. و دستورالعمل های آزمایشگاه را باز کنید، که یک PDF را با دستورالعمل های آزمایشگاهی برای دانش آموزان باز می کند ( شکل 2 ب). دانشآموزان میتوانند برای دسترسی به یادداشتهای خود و ایجاد تغییرات، کتاب زمینه را باز کنند. گزینه “تنظیمات باز” به دانش آموزان اجازه می دهد تا صداهای محیطی محیط مجازی را بی صدا کنند. از تنظیمات، دانش آموزان می توانند حالت چپ را انتخاب کنند و نشانگر انتخاب را به سمت چپ خود تغییر دهند ( شکل 2)ج). در گوشه سمت راست بالای منوی اصلی، سه گزینه اضافی وجود دارد، به عنوان مثال، ذخیره پیشرفت، صادرات گزارش آزمایشگاه به صورت PDF، و گزینه ای برای باز کردن نقشه منطقه ( شکل 2 د).
2.2. اتاق آماده و محیط مجازی
هنگامی که دانشآموزان برنامه نرمافزاری را شروع میکنند، به یک محیط مجازی که آن را «اتاق آماده» مینامیم آورده میشوند ( شکل 3 ). در اینجا، دانش آموزان می توانند برای دسترسی به نرم افزار وارد حساب کاربری خود شوند ( شکل 3 a). گزینه های ورود برای احراز هویت و مجوز دادن به کاربران گنجانده شده است. علاوه بر این، این یک دانش آموز را قادر می سازد تا آزمایشگاهی را بر روی یک دستگاه راه اندازی کند و آن را در دستگاه دیگر تکمیل کند. شکل 3ب). از طریق اتاق آماده، دانش آموزان می توانند انتخاب کنند که از کدام محیط مجازی و از کدام آزمایشگاه استفاده کنند. در حال حاضر، ما دو آزمایشگاه تراز داریم، اولی یک حلقه سه معیار و دومی یک خط تراز است. کار آینده ما آزمایشگاه های موجود را گسترش خواهد داد تا شامل ابزارهای اضافی (مثلاً کل ایستگاه ها و سیستم ماهواره ای ناوبری جهانی) و وظایف بیشتر (به عنوان مثال، تنظیم کنترل و جمع آوری داده ها برای نقشه برداری توپوگرافی) شود.
یک جزء جدایی ناپذیر از هر نرم افزار، بازی یا برنامه VR، محیط مجازی است. از طریق محیط، کاربران می توانند مسیریابی، کاوش، و ویژگی های اصلی نرم افزار را تجربه کنند. در VR، محیط برای ایجاد احساس «آنجا بودن» کلیدی است. اولین محیطی که ما ایجاد کردیم بخشی از پردیس دانشگاه پن ایالت Wilkes-Barre بود، جایی که دانشجویان نقشهبردار اغلب آزمایشگاههای فیزیکی خود را تکمیل میکنند. این به عنوان اعتبار سنجی برای استفاده از فناوری های ابر نقطه ای، یعنی فتوگرامتری هوایی از سیستم های هوایی بدون سرنشین کوچک (sUAS) و اسکن لیزری زمینی، برای ایجاد یک محیط واقعی (زمین و اشیاء) عمل کرد [ 42 ]]. چنین فناوریهایی اطلاعات هندسی را در سطح چند سانتیمتری ضبط میکنند، بنابراین امکان نمایش هندسی دقیق صحنههای واقعی در VR را فراهم میکنند. فناوریهای ابر نقطهای برای ایجاد محیطهای مجازی در رشتههای مختلفی مانند بازی و فیلمسازی، حفظ میراث فرهنگی و علوم زمین برای سفرهای میدانی استفاده شده است [ 43 ، 44 ، 45 ، 46 ، 47 ، 48 ]. یکی دیگر از جنبههای ضروری محیطهای مجازی، بافتها هستند، زیرا حس واقعگرایی را القا میکنند. برای ایجاد بافت های واقع گرایانه، از تصاویر نزدیک استفاده کردیم و آنها را به عنوان مواد روی اشیاء سه بعدی به کار بردیم [ 42 ]. شکل 4نمونه ای از محیط مجازی را نشان می دهد. دومین محیط موجود در نسخه فعلی نرم افزار Windridge City [ 49 ] است. این محیط توسط یونیتی رایگان و آماده استفاده ارائه شده است. ما از شهر ویندریج برای شبیه سازی بررسی های شهری در داخل نرم افزار استفاده می کنیم. این نرم افزار می تواند چندین محیط و آزمایشگاه را پشتیبانی کند و در آینده محیط های بیشتری با زمین های مختلف اضافه خواهد شد.
2.3. میله تسطیح
برای میله تراز، علامت گذاری در فتوشاپ ایجاد شد و در Unity به یک بافت تبدیل شد. کاربر می تواند میله را در هر مکانی بگیرد و رها کند. در نسخههای اولیه نرمافزار، کاربر برای دستیابی به تمرکز دقیق روی یک مکان (مثلاً نقشه برداری از بنای تاریخی یا نقطه عطف) باید یک رویکرد آزمون و خطا را انجام میداد و مرکز دادن دشوار، زمانبر و معکوس بود. برای سادهسازی این رویکرد، به میله اجازه میدهیم تا زمانی که میله با بنای یادبود یا نقطه عطف برخورد میکند، دقیقاً روی بناها یا نقاط عطف بچسبد.
در زندگی واقعی، نقشه بردار میله را با حباب دایره ای متصل به آن نگه می دارد و سعی می کند آن را هموار کند. چنین حرکت دست را نمی توان با دقت بالا در VR تکرار کرد. بنابراین، رویکرد متفاوتی با استفاده از تبلت مجازی دنبال شد. با انتخاب میله، کاربر می تواند منویی با سه محور را روی تبلت مجازی ببیند و وضعیت تراز میله را مشاهده کند ( شکل 5).آ). حباب مجازی از لبههای ویال دایرهای بیرون میآید که میله تا 1 درجه تراز شود (ویال دایرهای از -1 درجه تا +1 درجه متغیر است). در هر محور دو کنترل وجود دارد. اولین کنترل یک نوار لغزنده را حرکت می دهد که امکان چرخش درشت را برای تسطیح تقریبی میله فراهم می کند. سپس با استفاده از دکمه های جهت دار، کاربر چرخش های دقیق تری را برای تسطیح دقیق میله اعمال می کند. فلش های ریز هر بار 0.01 درجه (36′) تغییر می کنند. این اجازه می دهد تا در اکثر موارد میله را در فاصله 30 تا 1 دقیقه تراز کنید.شکل 5b نمونه ای از تراز شدن میله را نشان می دهد. با این راهحل، دانشآموزان میدانند که باید قبل از رفتن به مرحله آزمایشگاهی بعدی، میله را تراز کنند، بنابراین این هدف یادگیری خاص را حفظ میکنند. در نهایت، کاربر می تواند میله را در صورت نیاز در فواصل یک متری تا پنج متر منبسط و جمع کند (به نوار لغزنده “ارتفاع” در شکل 5 مراجعه کنید).
2.4. توابع سطح دیفرانسیل
برای ابزار سطح دیفرانسیل، مدلی بر اساس ابزار Topcon AT-G3 ایجاد کردیم. این ابزار به سه پایه متصل می شود، زیرا در ترازسازی دیفرانسیل، مرکز سازی لازم نیست و در میدان، نقشه برداران اغلب ابزار تراز دیفرانسیل نصب شده بر روی سه پایه را حمل می کنند. همانند میله، کاربر می تواند به سمت هر پایه سه پایه دست بگیرد و سه پایه و ابزار را به مکان دیگری منتقل کند.
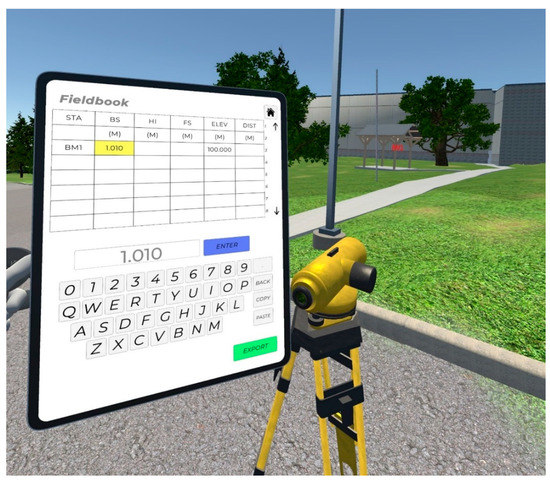
اکثر اجزای سه پایه و سطح قابل انتخاب هستند و به آنها عملکرد جداگانه ای می دهند، یعنی پایه های سه پایه، پیچ های سه پایه، تلسکوپ، دید چشمی، دستگیره فوکوس و چشمی. همانند میله، این اجزای جداگانه از طریق تبلت مجازی کنترل می شوند. فوکوس ابزار از طریق محو کردن تصویر با یک جزء وابسته به فاصله و قابلیت فوکوس از 0 تا 150 متر شبیه سازی می شود. شکل 6 a,b نمای ابزار را قبل و بعد از فوکوس نشان می دهد. توجه داشته باشید که در شکل 6 ب، خط ضربدری هنوز تار است. کاربر باید چشمی را انتخاب کرده و بر روی آن متمرکز شود ( شکل 6 ج). سپس، با انتخاب چشم انداز، کاربر یک چرخش درشت از ابزار دارد ( شکل 6د) که به کاربر اجازه می دهد تقریباً به سمت میله نشانه بگیرد. میدان دید این چرخش درشت 20 درجه است. سپس دانشآموز میتواند بدنه اصلی ابزار را انتخاب کند، که نمای چرخش دقیق را به ارمغان میآورد و امکان هدفگیری دقیق را فراهم میکند ( شکل 7 a). میدان دید در نمای ظریف 1 درجه 30 دقیقه است، مشابه ابزار Topcon که به عنوان مدل استفاده می شود. کاربر می تواند به سمت ابزار رفته و برای اندازه گیری به سمت تلسکوپ متمایل شود ( شکل 7ب). با این حال، خواندن میله با خم شدن به سمت ابزار می تواند در VR به دلیل بریدن (زمانی که دوربین جسم را قطع می کند) دشوار باشد. بنابراین، کاربران می توانند با استفاده از نمای تلسکوپ پیش بینی شده بر روی تبلت مجازی، مشاهداتی را انجام دهند. برای ثبت اندازهگیریها، دانشآموزان یک فیلدکتاب مجازی دارند. فیلد بوک مجازی مانند یک صفحه گسترده معمولی با سلول های متعددی که قابل انتخاب هستند تنظیم شده است ( شکل 8 ). هنگامی که آنها با آزمایشگاه تمام می شوند، می توانند یک دکمه صادرات را فشار دهند (به گوشه سمت راست پایین در شکل 8 مراجعه کنید ) و کل فیلدبوک را در قالب CSV برای استفاده در جاهای دیگر صادر کنند.
پایههای سهپایه و پیچهای سهپایه، تراز کردن ابزار را کنترل میکنند. از آنجایی که حرکت پایههای سهپایه و پیچهای سهپایه با موجهای زمین همراه است، باید تکنیکی برای قرار دادن کل دستگاه بر اساس طول پاها و همچنین زمینی که روی آن قرار داشت ایجاد میشد. بخش فرعی زیر به عمق تکنیک کارآمدی میپردازد که برای محاسبه موقعیت و چرخش مناسب ابزار سطح دیفرانسیل استفاده میشود.
2.5. موقعیت یابی کارآمد سه پایه
هنگام شبیهسازی اشیاء سهبعدی در VR، رندر کردن اشیاء چند ضلعی کم ساده است، در حالی که اشیاء پیچیده مانند آب برای شبیهسازی منابع بسیار فشردهتری دارند. یک رویکرد ساده لوحانه شبیه سازی کامل این اجسام به عنوان موجودات فیزیکی (با پارامترهای جرم، سرعت و موقعیت) در یک موتور فیزیک است. این شبیهسازی فیزیکی مقادیر زیادی از منابع محاسباتی را اشغال میکند و با معرفی پیچیدگی بیشتر، هزینه بهطور تصاعدی افزایش مییابد [ 50 ، 51 ]. این یا بازی سه بعدی را کند می کند یا به یک کامپیوتر قدرتمند نیاز دارد، به ویژه زمانی که یک شی در زمان واقعی ردیابی می شود [ 50 , 52]. ردیابی یک شیء سه بعدی پیچیده نیازمند یافتن موقعیت و چرخش آن نسبت به قاب مرجع در دنیای مجازی است. محاسبه اینها به طور فزاینده ای دشوار است زیرا اشکال پیچیده تری بر روی سطوح پیچیده تر قرار می گیرند. اگر کل فرآیند شبیه سازی فیزیکی حذف شود، می توان این فرآیند را به طور چشمگیری کاهش داد. ما یک تکنیک جدید برای موقعیتیابی اجسام پیچیده بر روی سطوح پیچیده بدون استفاده از مقادیر زیادی سربار محاسباتی ایجاد کردهایم. در ادامه، فرض بر این است که ما در مورد اجسامی صحبت می کنیم که هیچ ویژگی فیزیکی منحصر به فردی مانند تندرستی یا لغزندگی ندارند که در آن شبیه سازی فیزیکی اجتناب ناپذیر است. ما به دنبال اجرای این فرآیند در عین حفظ یک تجربه روان و همهجانبه برای حفظ مزایای VR هستیم [ 6 ،، 7 ] 8 , 9 ].
تکنیک ما در ابتدا برای استفاده با سه پایه با پایه های مختلف توسعه داده شد، و در نتیجه، روی هر جسمی با پایه ها یا نقاط پشتیبانی با طول متفاوت کار می کند. این تکنیک را می توان به اشیایی با تعداد نامحدودی از نقاط پشتیبانی، در هر نوع از زمین های مختلف گسترش داد. فرآیند را می توان به دو فاز اصلی تقسیم کرد، فاز موقعیت یابی و فاز چرخشی. برای قرار دادن جسم، لازم است موقعیت های انتهایی هر یک از تکیه گاه ها، به عنوان مثال، موقعیت انتهای پایه های سه پایه را بدانید. با توجه به این نقاط، سپس میتوانیم یک نقطه متوسط از این نقاط پشتیبانی پیدا کنیم، جایی که جسم باید در آن قرار گیرد ( شکل 9آ). همچنین باید نقطه زمین مربوطه را در زیر سه پایه پیدا کنیم که از محل تلاقی پایه های سه پایه با زمین (زمانی که سه پایه با زمین قطع می شود) یا امتداد پایه های سه پایه به دنبال جهت عمودی و ظاهری محاسبه می شود. تقاطع آنها با زمین (زمانی که سه پایه روی هوا است) ( شکل 9 الف). میانگین بردارهای سه بعدی به شرح زیر است:
جایی که پآvgoبjمیانگین بردار سه بعدی جسم (سه پایه) محاسبه شده در نقاط پشتیبانی (نقاط انتهایی پایه های سه پایه) است. nتعداد نقاط پشتیبانی است. و ایکسمنoبj، yمنoبj، و zمنoبjمختصات هستند مننقطه پشتیبانی پآvggnدمیانگین بردار سه بعدی زمین است که به عنوان تقاطع بین نقاط تکیه گاه و زمین یا تقاطع ظاهری آنها در حالتی که سه پایه روی هوا نگه داشته می شود محاسبه می شود. مقررات ایکسمنgnد، yمنgnد، و zمنgnدمختصات زمین مربوطه هستند مننقطه پشتیبانی
با تراز کردن پآvgoبjبه پآvggnد، می توانیم جسم (سه پایه) را روی زمین قرار دهیم. مرحله بعدی تراز کردن نرمال هایی است که توسط نقاط تکیه گاه و تقاطع آنها با زمین ایجاد می شود. ابتدا یک نرمال از نقطه میانگین جسم عمود بر ابر صفحه نقاط پشتیبان بدست می آوریم. به طور مشابه، میتوانیم یک نرمال از نقطه میانگین زمین عمود بر ابر صفحه در تقاطع نقاط نگهدارنده با زمین به دست آوریم. همانطور که در شکل 10 ب نشان داده شده است، یک ابر صفحه به سادگی با گرفتن دو بردار بین نقاط انتهایی تشکیل می شود . بردارهای ابر صفحه جسم را می توان با استفاده از فرمول های زیر پیدا کرد:
جایی که v1،2oبjو v1،3oبjبردارهای ابر صفحه برای جسم و پ1oبj=[ایکس1oبjy1oبjz1oبj]تی، پ2oبj=[ایکس2oبjy2oبjz2oبj]تی، و پ3oبj=[ایکس3oبjy3oبjz3oبj]تیبردارهای موقعیت نقاط انتهایی هستند. برای ابر صفحه زمین، به طور مشابه موارد زیر را داریم:
جایی که v1،2gnدو v1،3gnدبردارهای فراصفحه برای زمین و پ1gnد=[ایکس1gnدy1gnدz1gnد]تی، پ2gnد=[ایکس2gnدy2gnدz2gnد]تی، و پ3gnد=[ایکس3gnدy3gnدz3gnد]تیبردارهای موقعیت نقاطی هستند که از تقاطع نقاط انتهایی پشتیبان به زمین تشکیل می شوند.
با گرفتن ضرب ضربدر این دو بردار و یافتن جسم نرمال و زمین نرمال می توانیم نرمال این ابرصفحه را بدست آوریم:
جایی که nشیء طبیعی است و gزمین نرمال است اگر نقاط تکیه گاه در زمین های هموار در ارتفاع یکسان باشند، جسم عادی مستقیماً در جهت بالا قرار می گیرد. بعلاوه، اگر نقاط تکیه گاه حرکت کنند (مثلاً زمانی که پایه سه پایه کشیده شده باشد)، این جسم عادی نیز حرکت می کند. چرخش سه پایه را می توان در صورتی به دست آورد که به سادگی جسم را تراز کنیم و بردارهای عادی را زمین کنیم. زوایای چرخش به شرح زیر است:
جایی که آبردار سه زاویه چرخش است. هنگامی که جسم در امتداد زوایای محور x و محور z می چرخد (چرخش محور y در امتداد جهت بالا و پایین کنار گذاشته می شود)، نقاط تکیه گاه با زمین تراز می شوند که این فرآیند را کامل می کند. شکل 10 a نمونهای از عادیهای جسم و زمین را هنگامی که سهپایه در هوا نگه داشته میشود، نشان میدهد و شکل 10 b نشان میدهد که وقتی کاربر سهپایه را به زمین میاندازد، این دو حالت عادی در یک راستا قرار میگیرند.
2.6. تراز کردن سطح دیفرانسیل
2.6.1. حباب دایره ای مجازی
هنگامی که کاربر تلاش می کند پایه ها و پیچ های سه پایه را تنظیم کند، مهم است که همان روش بازخورد را در زمان واقعی از طریق یک حباب دایره ای مجازی به آنها ارائه دهیم ( شکل 11 ). حباب مستقیماً از چرخش محور عمودی تلسکوپ نسبت به جهت بالا ( محور y در واحد) کنترل می شود. در دنیای فیزیکی، جهت بالا با یک خط شاقول مطابقت دارد. برای ارائه بازخورد حباب دایره ای به کاربر، مقادیر چرخش محور x و z را می گیریم و با استفاده از فرمول های مربع به دایره، این مقادیر را روی یک دایره ترسیم می کنیم:
جایی که ایکسو زمختصات دکارتی مربوطه برای رسم حباب در دایره شکل 11 هستند و توو vزوایای چرخش نسبت به محور x و محور z هستند. فضای حباب دایرهای محلی زمانی که ابزار حول محور y چرخانده میشود، چرخانده میشود ، که نمایش دقیقی از چرخش تجهیزات و سیستم حبابها را ارائه میدهد، دقیقاً مانند دنیای واقعی ( شکل 11 ). را توو vزوایای چرخش شامل چرخش ناهموار سه پایه (تراز کردن درشت) و چرخش دقیق پیچ های تریبراک (تراز کردن دقیق) به شرح زیر است:
جایی که تو”و v”زوایای چرخش جسم نرمال هستند (حرکت سه پایه) زمانی که سه پایه حول محور y می چرخد ، و تو”و v”زوایای چرخش تلسکوپ (حرکت تریبراک) هنگامی که ابزار حول محور y می چرخد .
2.6.2. تراز کردن خشن (پاهای سه پایه)
تراز کردن ناهموار ابزار زمانی شروع می شود که کاربر پایه های سه پایه را تنظیم می کند، که تقریباً جسم را با جهت “بالا” تراز می کند. تو”و v”زوایای چرخش از معادلات 12 و 13). سپس از پیچ های تریبراک برای دستیابی به تسطیح دقیق ابزار استفاده می شود که محور تلسکوپ را که عمود بر محور تلسکوپ است، با جهت بالا ( محور y ) تراز می کند. کاربر می تواند تک تک پایه های سه پایه را انتخاب کند (به عنوان مثال، شکل 11 ). با استفاده از میلههای کشویی و فلشهای کنترلی ظریف ( شکل 11 الف)، کاربر میتواند هر پایه را حدود 50 سانتیمتر منبسط یا جمع کند تا به تسطیح تقریبی/درشت دست یابد. ویال دایرهای درشت ناحیهای را نشان میدهد که از -3 درجه تا +3 درجه متغیر است، و دکمههای پیکان ظریف چرخش را 1 دقیقه تغییر میدهند. بنابراین بعد از این مرحله ساز از تراز شدن چند درجه تا چند دقیقه فاصله خواهد داشت.
2.6.3. تراز کردن دقیق (چرخش پیچ)
پیچهای تریبراچ یک چرخش خوب بین محور عمودی تلسکوپ و جهت بالا ایجاد میکنند. در دنیای فیزیکی، چرخش پیچ ها به معنای تغییر فیزیکی در ارتفاع پیچ های تریبراخ است. در VR، زمانی که کاربر پیچ ها را می چرخاند، تلسکوپ نسبت به پیچ ها به طور نسبی می چرخد. “ارتفاع شبه” پیچ ها از -1 تا 1 (بدون واحد) متفاوت است. سپس، می توانیم یک محدوده چرخشی از مقادیر را به آن مقادیر اختصاص دهیم. در این پیاده سازی، −1 را به چرخش 3- درجه و 1 را به چرخش 3+ اختصاص داده ایم. با تغییر این تناظر می توانیم شیب مجاز تلسکوپ را کم یا زیاد کنیم. ما سه مقدار “شبه ارتفاع” پیچ ها را به x – و ترسیم می کنیم z ترسیم می کنیم– چرخش محور تلسکوپ به یاد بیاورید که در Unity، محور y با محور up مطابقت دارد. این نگاشت را با استفاده از پیچ سمت چپ برای چرخش محور x مثبت و نیمی از چرخش محور z منفی (با فرض اینکه جلو در جهت محور x مثبت باشد)، پیچ سمت راست را به عنوان چرخش محور x منفی انجام می دهیم. و نیمی از چرخش محور z منفی ، و پیچ پشتی به عنوان چرخش محور z مثبت . فرمول های واقعی برای یافتن مقادیر چرخش به شرح زیر است:
جایی که تو”چرخش محور x تلسکوپ بر حسب درجه است ،v”چرخش محور z تلسکوپ بر حسب درجه است ،بارتفاع پیچ پشتی است، لارتفاع پیچ سمت چپ است و rارتفاع پیچ مناسب است. به عنوان مثال، در اجرای ما، اگر پیچ سمت چپ با 0.5 حرکت داده شود و پیچ سمت راست 0 باقی بماند، آنگاه تو”مقدار 0.25 می شود که بر حسب درجه با 0.75 درجه مطابقت دارد. با پیچ پشت نیز در 0، v”مقدار 0.25- می شود که بر حسب درجه با 0.75- درجه مطابقت دارد. ترکیبی از تنظیمات پیچ و پایه توسط کاربر منجر به یک ابزار تراز مانند نقشه برداری واقعی می شود.
3. نتایج و بحث
3.1. موقعیت یابی کارآمد سه پایه
در نقشه برداری، پایه های روی سه پایه به گونه ای تنظیم می شوند که ابزار را بر اساس شکل زمین مواجه شده تراز کنند. موقعیت باید در هر فریم مجدداً محاسبه شود تا یک انتقال صاف ایجاد شود. برای یک تجربه واقعیت مجازی دلپذیر و بهینه، نرخ سوئیچ که فریم در ثانیه (FPS) نامیده می شود، باید حداقل در 60 FPS [ 53 ] حفظ شود، در حالی که Oculus 90 FPS [ 54 ] را توصیه می کند. شکل 12 مقایسه عملکرد را نشان می دهد زمانی که یک شبیه سازی فیزیک کامل از پایه های سه پایه استفاده می شود ( شکل 12 a) در مقابل تکنیک ما ( شکل 12).ب). رنگ سبز تیره تخصیص زمان اجرا را به دلیل رندر نشان می دهد، آبی کد ما است که با فیزیک پیاده سازی شده است، نارنجی دیگر توابع فیزیک مرتبط در Unity و سبز روشن توابع پس زمینه Unity است. هنگامی که از شبیه سازی کامل استفاده می شود، فریم ها به طور معمول به 66 میلی ثانیه افزایش می یابند که معادل 15 FPS است و منجر به تاخیر ناخوشایند می شود. فرآیند با استفاده از تکنیک ما بسیار کمتر از 10 میلی ثانیه طول می کشد و 60 فریم بر ثانیه را حفظ می کند. بنابراین، رویکرد ما هیچ بار اضافی ایجاد نمی کند. ما دریافتیم که این بهبود عملکرد برای شبیهسازی حیاتی است، زیرا تنظیمات صاف قطعات مختلف تجهیزات بدون آن امکانپذیر نخواهد بود. سیستم کامپیوتری مورد استفاده برای این شبیه سازی دارای پردازنده Intel i7-8700 (3.2 گیگاهرتز)، 64 گیگابایت رم و پردازنده گرافیکی NVIDIA GeFORCE GTX 1060 6 گیگابایتی بود.
3.2. ترازسازی ابزار سطح دیفرانسیل
شکل 13 سه پایه را تقریباً تراز شده (در 3± درجه) و جسم عادی تقریباً با محور y پس از دستکاری پایه های سه پایه در VR در یک راستا نشان می دهد. در مرحله بعد، کاربر با استفاده از پیچ های تریبراک به سمت تراز کردن دقیق حرکت می کند. برای واقعیتر کردن دستکاری پیچهای تریبراچ، پیچهای تریبراخ را رنگبندی کردیم و کاربر را محدود کردیم تا حداکثر دو پیچ را در یک زمان انتخاب کند ( شکل 14 a). علائم مثبت یک پیچ تریبراخ مربوطه را به منوی سطح اضافه می کنند و علائم منفی آنها را حذف می کنند. به عنوان مثال، در شکل 14الف، پیچ های سبز و آبی اضافه شده است. این شبیه تکنیک اصلی تراز کردن است که توسط نقشه برداران برای جابجایی دو پیچ تریبراخ ابتدا و سپس سومی به طور جداگانه استفاده می شود. در این مثال، پیچ سوم، پیچ قرمز است. در نسخههای قبلی نرمافزار [ 38 ]، ویال سطح دایرهای در شکل 14 a محدوده 1- تا 1+ را نشان میدهد، و دکمههای پیکان ظریف چرخش را 0.01 درجه (36′′) تغییر میدهند. برای عملیات تراز کردن، این برای دستیابی به دقت تسطیح بالا کافی نیست، زیرا سطوح خودکار مجهز به جبرانکنندههایی هستند که اغلب اجازه تسطیح تا 0.3 ±” را میدهند و میتوانند به دقتی در حدود 1 میلیمتر در 1 کیلومتر دست یابند [ 32 ]. این به یک رویکرد دو مرحله ای برای پیچ های تریبراخ تغییر یافت. محدوده های موجود در ویال های سطح دایره ای در شکل 14a مانند پایه های سه پایه ساخته شده است، بنابراین ویال اکنون محدوده ای از -3 درجه تا +3 درجه را نشان می دهد، و دکمه های فلش ظریف چرخش را 1 دقیقه تغییر می دهند. سپس، با انتخاب یک دکمه جابجایی، کاربر به صفحه ویال دایرهای بزرگنمایی شده/دقیق میرود که امکان تراز کردن دقیق را فراهم میکند ( شکل 14 ب). در این صفحه دوم، ویال محدوده ای از -3 تا +3 را به تصویر می کشد و دکمه های فلش ظریف چرخش را 1 اینچ تغییر می دهند. این بدان معناست که اکنون میتوان ابزار را تا 1 اینچ توسط کاربران تراز کرد، که مربوط به خطای 0.5 میلیمتر در 100 متر است. از دانشآموزان انتظار نمیرود که حلقههای سطحی طولانیتر از 100 تا 200 متر انجام دهند، زیرا به محیطهای مجازی بسیار بزرگ و صرف بیش از 20 تا 30 دقیقه در VR نیاز دارد. این می تواند علائم تهوع را افزایش دهد [ 55 ، 56 ، 57] و بنابراین، این سطح از دقت برای اکثر آزمایشگاه های مجازی نقشه برداری کافی است. همچنین شایان ذکر است که میتوانیم یک شیب کوچک «ثابت» به تلسکوپ اضافه کنیم و خطای تقارن را تکرار کنیم [ 38 ]. این یک افزودنی عالی برای اهداف نمایشی و ایجاد آزمایشگاههای ویژه با تمرکز بر متعادل کردن فاصلههای دید پسبینی و آیندهنگاری یا با تمرکز بر کالیبراسیون ابزارهای سطح و تخمین تصحیح کولیماسیون است.
3.3. بازخورد آموزشی
در چنین محیطهای یادگیری تجربی، پس از تکمیل آزمایشگاههای نقشهبرداری، برای دانشآموزان مهم است که دقت به دست آمده خود را بررسی کرده و در هنگام جمعآوری دادهها، اشتباهات خود را شناسایی کنند. از طریق تامل و گفتگو با مربی، دانش آموزان می توانند تجربه کسب کنند، مهارت های خود را بهبود بخشند و بین نظریه و عمل ارتباط برقرار کنند. در آزمایشگاههای فیزیکی، اغلب ارائه بازخورد معنادار برای مربیان دشوار است، زیرا اطلاعاتی درباره وضعیت ابزار در طول اندازهگیری اغلب در دسترس نیست. علاوه بر این، دانشآموزان اغلب در مشاهدات خود اشتباه میکنند، که منجر به اشتباهات بزرگ میشود (یعنی نظرسنجی الزامات دقت را برآورده نمیکند)، اما اغلب برای مربی و دانشآموزان غیرممکن است که اندازهگیریهای اشتباه در سطحسازی را شناسایی کنند.
گزارش آزمایشگاه PDF یک ابزار آموزشی مهم نرم افزار است، زیرا بازخورد معنی داری را برای دانش آموزان فراهم می کند. هر بار که کاربر برای ثبت اندازه گیری به فیلد بوک دسترسی پیدا می کند، شرایط محیط را ثبت می کنیم. به طور خاص، ما زمان این را می گیریم که میله چقدر خارج از سطح است، چقدر ابزار خارج از سطح است، فاصله بین ابزار و میله، اندازه گیری میله واقعی، اختلاف ارتفاع بین ابزار و میله، و وضعیت فوکوس ابزار، و همچنین تصویری از میله و فیلد بوک. بنابراین، دانشآموزان میتوانند اندازهگیریهای واقعی و مشاهدهشده را با هم مقایسه کنند، خطاهای آنها را بفهمند و اشتباهات را در روشهای نقشهبرداری خود شناسایی کنند.
شکل 15 a یک مثال واقعی را نشان می دهد، جایی که کاربر یک اندازه گیری را ثبت کرد، اما ابزار را به طور دقیق تراز نکرد. اندازه گیری ثبت شده 0.496 متر است. کاربر متوجه آن شد و به عقب رفت تا هم میله ها و هم ابزار را صاف کند ( شکل 15 ب). اندازه گیری ثبت شده اکنون 0.482 متر است. علاوه بر این، می بینیم که اندازه گیری واقعی (اندازه گیری که کاربر باید برای حالت تسطیح داده شده ابزار و میله رعایت می کرد) در 1 میلی متر از اندازه گیری مشاهده شده است. این نوع بازخورد در آزمایشگاه های فیزیکی دست نیافتنی است و می تواند به دانش آموزان کمک کند تا در مورد اشتباهات خود فکر کنند و مهارت های نقشه برداری خود را بهبود بخشند و همچنین مفاهیم نظری را با عمق بیشتری درک کنند.
3.4. مثال های سطح بندی مجازی
ما دو مثال جامع از سطح بندی ارائه می دهیم تا نشان دهیم که چگونه می توان سطح بندی دیفرانسیل را در VR انجام داد.شکل 16a تمرین تسطیح برای مثال اول را نشان می دهد که یک حلقه سه معیار است. شکل مکان معیار (BM) و مکانهای تنظیم ابزار را نشان میدهد. ابزار سطح دیفرانسیل در مکان های “تنظیم” و میله در مکان های “BM” تنظیم می شود. از راهاندازی 1 شروع میکنیم، جایی که اندازهگیری پسبینی را به BM1 و اندازهگیری آیندهنگاری را به BM2 دریافت میکنیم. در راهاندازی دوم، یک اندازهگیری پسبینی به BM2 و یک اندازهگیری آیندهنگری به BM3 دریافت میکنیم. سپس، در تنظیم سوم، یک اندازهگیری پسبینی به BM3 و یک اندازهگیری آیندهنگری به BM1 دریافت میکنیم. بازگرداندن اندازهگیری آیندهنگاری نهایی به BM1، حلقه سطح را تکمیل میکند و به نقشهبر اجازه میدهد تا یک خطای پنهان را دریافت کند، زیرا مجموع پیشبینیها منهای مجموع آیندهنگاریها باید صفر باشد. تمرین دوم استفاده از محیط شهر ( شکل 16ب). آزمایشگاه از BM1 شروع می شود و با الزام به قرار دادن یک معیار موقت (TPBM1) در گوشه خیابان به BM2 بسته می شود. در این مورد، ما ارتفاعات BM1 و BM2 را می دانیم. بنابراین، ما میتوانیم اطلاعات نادرست را دریافت کنیم و صحت نظرسنجی را بررسی کنیم. توجه داشته باشید که در دنیای فیزیکی، نقشهبرداران باید فاصلههای پسبینی و آیندهنگاری را تا چند متری متعادل کنند (یعنی ابزار را تقریباً در وسط دوربینهای پشتبینی و آیندهنگاری تنظیم کنند) تا خطای همسانی ابزار را کاهش دهد. 32 ].]، که در پیاده سازی های ما شبیه سازی نشده است. هر دو مثال ساده و طراحی شدهاند، با توجه به اینکه کاربران نباید بیش از 20 تا 30 دقیقه در VR صرف کنند. تکمیل مثال حلقه سه معیار 35 دقیقه طول کشید و خط نقطه به نقطه 20 دقیقه تکمیل شد. فایل ضبط شده از آزمایشگاه شهر را می توانید در این پیوند پیدا کنید: https://psu.mediaspace.kaltura.com/media/Dimitrios+Bolkas%27s+Personal+Meeting+Room/1_5lt5lgxx (در 21 آوریل 2021 قابل دسترسی است).
جدول 1 اندازه گیری های فیلد بوک برای حلقه سه معیار و همچنین اندازه گیری های واقعی را نشان می دهد. توجه داشته باشید که اندازه گیری واقعی مربوط به قرائت ضربدری میانی در یک حالت تسطیح معین از ابزار است. هیچ گونه خطای ایجاد شده در نتیجه تراز نادرست ابزار و میله را در نظر نمی گیرد. بنابراین، اندازهگیریهای واقعی در جدول 1 مطابق با اندازهگیریهایی است که کاربر باید بر اساس وضعیت تسطیح موجود ابزار و میله مشاهده میکرد. تفاوت ارتفاع واقعی بین نقطه دید پشت و آینده را می توان از گزارش PDF بازیابی کرد، زیرا در هر اندازه گیری، ما اختلاف ارتفاع بین پآvgoبjو پایه میله تراز. اختلاس بدست آمده از این آزمایش 0.001- متر است. مقایسه بین اندازه گیری های مشاهده شده و واقعی نشان می دهد که کاربر همیشه در محدوده 1 میلی متر بوده است. بسته شدن اشتباه با استفاده از اندازهگیریهای واقعی صفر بود، که همچنین نشان میدهد که ابزار همیشه با دقت تراز شده است. هر گونه انحراف از صفر در عدم انحراف اندازهگیری واقعی نشاندهنده خطاهای تراز اشتباه (اعم از میله یا ابزار) است. میله تسطیح همیشه با دقت 1′ یا بهتر تراز می شد و تسطیح ابزار همیشه در محدوده 0′′ تا 2′′ بود. بنابراین، این 0.001-m نادرست بسته شدن مربوط به خطاهای مشاهده تصادفی است. در مثال حلقه سه معیار، فاصلههای پسبینی و آیندهنگری به خوبی متعادل شدهاند. به استثنای اولین راهاندازی به دلیل زمین ناهموار و این واقعیت که کاربر مجبور بود برای اطمینان از اندازهگیری به میله پشتی نزدیکتر شود. فواصل تبدیل شده از سرعت های مجازی، در 1 متر از فواصل واقعی هستند، که نشان می دهد که ابزار گام گذاری مجازی برای پشتیبانی از روش های تراز مجازی کافی است. نکته قابل توجه این است که در تنظیم سوم، درختی وجود دارد که تا حدودی دید را در اندازهگیری پسبینی BM 3 مسدود میکند. کاربر در اینجا گزینههای زیادی ندارد، زیرا به دلیل اختلاف ارتفاع زیاد بین BM 3 و BM 1 (حدود 2.4 متر)، باید تنظیمات دیگری اضافه کنیم، در غیر این صورت کاربر در نهایت میله را خیلی بالا می خواند (خوانش میله از 4 متر تا 5 متر). این یک تمرین میدانی خوب نیست زیرا می توان خطاهای بالاتری را معرفی کرد. در اولین تلاش، میله قابل خواندن نبود زیرا برگ های درخت جلوی دید را گرفته بودند. بنابراین، کاربر مجبور بود میله را کمی حرکت دهد و ابزار را صاف کند. برگها همچنان بخشی از میله را مسدود میکردند، اما ثبت اندازهگیری امکانپذیر بود، زیرا برگها در زمانهای خاصی در زیر باد مجازی حرکت میکردند.شکل 17 ). اندازه گیری در این مورد 3.351 متر بود. این نشان میدهد که آزمایشگاههای نقشهبرداری در VR همهجانبه و تعاملی میتوانند بسیار واقعبینانه باشند و دانشآموزان میتوانند چالشهایی را تجربه کنند که اغلب در این زمینه با آنها مواجه میشوند.
جدول 2 نتایج مربوط به مثال دوم (خط نقطه به نقطه/سطح) را در محیط شهر نشان می دهد. زمین محیط شهر نسبتاً مسطح است که با اندازهگیریهای ثبت شده پسبینی و آیندهنگاری نیز مشخص میشود. نتیجه اصلی در اینجا کمک به دانشآموزان برای درک خطرات موجود در محیط شهر و تصدیق این است که تنظیمات ابزار برای ایمنی باید در پیادهرو باشد ( شکل 15 ب). تفاوت ارتفاع واقعی بین BM 1 و BM 2 که ما در تلاش برای مشاهده آن هستیم -0.153 متر است. همانطور که در جدول 2 نشان داده شده است، این مقدار نیز با استفاده از اندازه گیری های واقعی از گزارش خروجی پیدا شد. تفاوت مشاهده شده 0.154- متر بود، که همچنین نشان دهنده اختلاف 0.001 متر به دلیل خطاهای مشاهده است. ارتفاع معیار موقت، پس از توزیع خطا، 341.579 متر مشخص شد. همانند مثال قبلی، میله با دقت بهتر از 1 و ساز با دقت 1 اینچ تراز شد.
4. نتیجه گیری
ما یک شبیهسازی VR جدید برای بررسی فعالیتهای مهندسی ارائه کردیم. به طور خاص، ما کارایی آن را در زمینه نقشه برداری با انجام آزمایشگاه های دانشگاهی در VR نشان دادیم. شبیه سازی سطح بندی همهجانبه و تعاملی است و به دانش آموزان تجربه اول شخص می دهد. دانش آموزان می توانند مانند دنیای فیزیکی سطح مجازی را انجام دهند. آنها می توانند یک میله تسطیح را بگیرند، حرکت دهند، مرکز و تراز کنند. آنها می توانند ابزار سطح دیفرانسیل را بگیرند، حرکت دهند و تراز کنند. حتی عملکردهای ساده، اما مهم ابزار، مانند فوکوس ابزار و چشمی، تکرار شد. از نظر تسطیح، دانش آموزان پایه های سه پایه را تنظیم می کنند تا به تراز کردن درشت دست یابند، قبل از اینکه برای دستیابی به تراز دقیق، به تنظیم پیچ های سه پایه بروند. این به طور صادقانه فرآیند سطح بندی را که دانش آموزان در دنیای فیزیکی با آن مواجه می شوند تکرار می کند. علاوه بر این، دانش آموزان می توانند اندازه گیری ها را در یک فیلدکتاب مجازی ثبت کنند. ثابت شد که تکرار مجازی ابزار سطح دیفرانسیل دشوارترین کار است، زیرا باید مشابه واقعی خود را با سطحی از دقت تطبیق دهد که دانشآموز بتواند مهارتهای شبیهسازی را پیدا کند و آنها را به دنیای واقعی منتقل کند. . تجهیزات و چشم انداز باید به آرامی با هم کار می کردند تا تجربه ای مداوم ایجاد کنند که مانع غوطه وری نشود. ما یک تکنیک جدید برای تسطیح اجسام چند پا در زمین های متغیر توسعه دادیم. این تکنیک تغییرات هندسی حرکت سهپایه را مدلسازی میکند و شبیهسازی فیزیکی را حذف میکند، که کارایی را به طور چشمگیری افزایش میدهد و تضمین میکند که 60 FPS همیشه حفظ میشود و تجربهای دلپذیر را به کاربران ارائه میدهد. ثابت شد که تکرار مجازی ابزار سطح دیفرانسیل دشوارترین کار است، زیرا باید مشابه واقعی خود را با سطحی از دقت تطبیق دهد که دانشآموز بتواند مهارتهای شبیهسازی را پیدا کند و آنها را به دنیای واقعی منتقل کند. . تجهیزات و چشم انداز باید به آرامی با هم کار می کردند تا تجربه ای مداوم ایجاد کنند که مانع غوطه وری نشود. ما یک تکنیک جدید برای تسطیح اجسام چند پا در زمین های متغیر توسعه دادیم. این تکنیک تغییرات هندسی حرکت سهپایه را مدلسازی میکند و شبیهسازی فیزیکی را حذف میکند، که کارایی را به طور چشمگیری افزایش میدهد و تضمین میکند که 60 FPS همیشه حفظ میشود و تجربهای دلپذیر را به کاربران ارائه میدهد. ثابت شد که تکرار مجازی ابزار سطح دیفرانسیل دشوارترین کار است، زیرا باید مشابه واقعی خود را با سطحی از دقت تطبیق دهد که دانشآموز بتواند مهارتهای شبیهسازی را پیدا کند و آنها را به دنیای واقعی منتقل کند. . تجهیزات و چشم انداز باید به آرامی با هم کار می کردند تا تجربه ای مداوم ایجاد کنند که مانع غوطه وری نشود. ما یک تکنیک جدید برای تسطیح اجسام چند پا در زمین های متغیر توسعه دادیم. این تکنیک تغییرات هندسی حرکت سهپایه را مدلسازی میکند و شبیهسازی فیزیکی را حذف میکند، که کارایی را به طور چشمگیری افزایش میدهد و تضمین میکند که 60 FPS همیشه حفظ میشود و تجربهای دلپذیر را به کاربران ارائه میدهد. زیرا باید همتای دنیای واقعی خود را با سطحی از دقت مطابقت میداد که دانشآموز بتواند مهارتهای شبیهسازی را به دست آورده و آنها را به دنیای واقعی منتقل کند. تجهیزات و چشم انداز باید به آرامی با هم کار می کردند تا تجربه ای مداوم ایجاد کنند که مانع غوطه وری نشود. ما یک تکنیک جدید برای تسطیح اجسام چند پا در زمین های متغیر توسعه دادیم. این تکنیک تغییرات هندسی حرکت سهپایه را مدلسازی میکند و شبیهسازی فیزیکی را حذف میکند، که کارایی را به طور چشمگیری افزایش میدهد و تضمین میکند که 60 FPS همیشه حفظ میشود و تجربهای دلپذیر را به کاربران ارائه میدهد. زیرا باید همتای دنیای واقعی خود را با سطحی از دقت مطابقت میداد که دانشآموز بتواند مهارتهای شبیهسازی را به دست آورده و آنها را به دنیای واقعی منتقل کند. تجهیزات و چشم انداز باید به آرامی با هم کار می کردند تا تجربه ای مداوم ایجاد کنند که مانع غوطه وری نشود. ما یک تکنیک جدید برای تسطیح اجسام چند پا در زمین های متغیر توسعه دادیم. این تکنیک تغییرات هندسی حرکت سهپایه را مدلسازی میکند و شبیهسازی فیزیکی را حذف میکند، که کارایی را به طور چشمگیری افزایش میدهد و تضمین میکند که 60 FPS همیشه حفظ میشود و تجربهای دلپذیر را به کاربران ارائه میدهد. تجهیزات و چشم انداز باید به آرامی با هم کار می کردند تا تجربه ای مداوم ایجاد کنند که مانع غوطه وری نشود. ما یک تکنیک جدید برای تسطیح اجسام چند پا در زمین های متغیر توسعه دادیم. این تکنیک تغییرات هندسی حرکت سهپایه را مدلسازی میکند و شبیهسازی فیزیکی را حذف میکند، که کارایی را به طور چشمگیری افزایش میدهد و تضمین میکند که 60 FPS همیشه حفظ میشود و تجربهای دلپذیر را به کاربران ارائه میدهد. تجهیزات و چشم انداز باید به آرامی با هم کار می کردند تا تجربه ای مداوم ایجاد کنند که مانع غوطه وری نشود. ما یک تکنیک جدید برای تسطیح اجسام چند پا در زمین های متغیر توسعه دادیم. این تکنیک تغییرات هندسی حرکت سهپایه را مدلسازی میکند و شبیهسازی فیزیکی را حذف میکند، که کارایی را به طور چشمگیری افزایش میدهد و تضمین میکند که 60 FPS همیشه حفظ میشود و تجربهای دلپذیر را به کاربران ارائه میدهد.
از طریق VR، ما می توانیم سناریوهای نقشه برداری متعددی را در چندین محیط مجازی ایجاد کنیم. بنابراین، آموزش دانش آموزان در شرایط مختلف نقشه برداری که تکرار آنها در دنیای فیزیکی بارها دشوار (و گاهی غیرممکن) است. چنین آزمایشگاههای VR را میتوان برای پشتیبانی از آموزش نقشهبرداری در زمانی که آزمایشگاهها به دلیل آب و هوا لغو میشوند، استفاده کرد. هنوز موانعی در رابطه با سخت افزار کامپیوتر مورد نیاز برای در دسترس قرار دادن این نرم افزار برای یادگیری از راه دور وجود دارد. نویسندگان در حال کار بر روی تطبیق نرم افزار در Oculus Quest 2 هستند که بدون اتصال است و نرم افزار را می توان مستقیماً در HMD بارگذاری کرد. با این حال، در این مرحله، برخی از سادهسازیها در محیط مجازی و بافتها ممکن است ضروری باشد.
ما دو آزمایشگاه تسطیح دیفرانسیل را به عنوان نمایش انجام دادیم، یک حلقه سه معیار و یک خط تسطیح نقطه به نقطه. در هر دو مورد، انسداد 1 میلی متر بود که به دلیل خطاهای تصادفی مشاهده ای است. این نشان میدهد که فعالیتهای تسطیح را میتوان به طور صادقانه در VR با همان دقتی که نقشهبرها میتوانند در دنیای فیزیکی به دست آورند، تکرار کرد. محیط واقع بینانه است و چالش های واقعی را برای کاربران ایجاد می کند. به عنوان مثال، ما نشان دادیم که چگونه برگ درختان با باد حرکت می کنند و دید ساز را به میله مسدود می کنند. گزارش خروجی بازخورد آموزشی عالی ارائه می دهد که در زندگی واقعی قابل دستیابی نیست. این گزارش وضعیت تسطیح ابزار و میله و همچنین اندازهگیریهای واقعی را که دانشآموزان باید رعایت میکردند، نشان میدهد. بنابراین، دانش آموزان می توانند از گزارش خروجی استفاده کنند و از طریق تأمل، آنها می توانند اشتباهات و رویکرد نقشه برداری خود را درک کنند، که به آنها کمک می کند تا مهارت های نقشه برداری و مهندسی خود را بهبود بخشند. این مقاله بر جنبههای فنی نرمافزار متمرکز بود، در حالی که پیادهسازی و ارزیابی آموزشی جامع در آینده دنبال خواهد شد.
آزمایشگاه های توسعه یافته آزمایشگاه های تک نفره هستند (یک دانش آموز آزمایشگاه مجازی را هدایت می کند). اگرچه این رویکرد مزایایی دارد، اما دانشآموزان نقشهبردار هرگز کل آزمایشگاه را به تنهایی انجام نمیدهند. همانطور که یک دانش آموز باید در ابزار ساخت و ضبط مشاهدات باشد و دانش آموز دوم باید میله را صاف نگه داشته باشد. بنابراین، آنها تمام مراحل مرتبط با سطح بندی را تجربه می کنند و به آنها یک تجربه کلی و یک دیدگاه متفاوت می دهد. کار آینده بر توسعه یک مجموعه مشترک متمرکز خواهد بود که به دو یا چند بازیکن اجازه می دهد تا در محیط با هم زندگی کنند و آزمایشگاه های نقشه برداری را به صورت گروهی انجام دهند و مهارت های کار تیمی خود را به کار گیرند. کار موجود بر روی یادگیری مشارکتی در VR مزایای زیادی را نسبت به کارهای فردی مانند بهبود یادگیری نتایج و کاهش اضطراب مربوط به وظایف نشان می دهد.58 ]. علاوه بر این، این نرم افزار به گونه ای گسترش خواهد یافت که محیط ها و ابزارهای نقشه برداری بیشتری مانند ایستگاه های کل و سیستم های ماهواره ای ناوبری جهانی را شامل شود.




















بدون دیدگاه