

خلاصه
کلید واژه ها:
مدل بیضی ; سنجش تشابه ; عدم قطعیت ؛ ویژگی های حرکتی
1. معرفی
-
ما یک مدل بیضی اصلاحشده برگرفته از [ 4 ] را پیشنهاد میکنیم که میتواند عدم قطعیت در یک مسیر را با محاسبه دینامیکی پارامترهای شکل مدل بر اساس ویژگیهای حرکت هر بخش از مسیر، توصیف کند.
-
ما یک معیار تشابه جدید بر اساس مدل ارائه میکنیم که اندازهگیری شباهت مسیر نامشخص (UTSM) نامیده میشود. تایید شده توسط آزمایشها بر روی دادههای مصنوعی و دادههای دنیای واقعی، UTSM توانایی بهتری برای مقایسه شباهت بین مسیرها نشان میدهد و همچنین در برابر نویز و نقاط پرت قویتر است و فرکانسهای نمونه مختلف و نمونهبرداری ناهمزمان را تحملتر میکند.
2. مقدمات و تعریف مسئله
2.1. مفاهیم اساسی
-
مسیر فضایی و زمانی
خط سیر فضا-زمان یک منحنی پیوسته است که از حرکت یک جسم متحرک در فضای اقلیدسی در یک دوره معین تشکیل می شود. مورفولوژی مسیر را می توان با یک تابع پیوسته به دقت توصیف کرد. با این حال، در واقعیت، موقعیت مکانی جسم متحرک عموماً توسط یک سنسور در فرکانس ثابت یا تصادفی ثبت میشود. مسیر حرکت جسم معمولاً با دنباله ای از موقعیت های حاوی اطلاعات مکانی و زمانی نشان داده می شود، مانند:
پس0،تی0،س1،تی1،…،سn-1،تیn-1که در آن تعداد نقاط نمونه برداری از کل مسیر و سمنموقعیت جسم متحرک در نقطه زمانی است تیمن. در کاربردهای عملی، سمنبه طور کلی یک مختصات دو بعدی یا سه بعدی است. این مقاله عمدتاً بر روی مسیرها در فضای دو بعدی تمرکز دارد، بنابراین با ترکیب اطلاعات زمانی، نقطه نمونهبرداری را میتوان به صورت ( ایکسمن،yمن،تیمن).
-
خطای درون یابیاز آنجایی که دادههای ثبتشده حسگر، دنبالهای از نقاط نمونهبرداری هستند که در زمان و مکان پیوسته نیستند، نقاط نمونهگیری عموماً به ترتیب زمانی به هم متصل میشوند تا مورفولوژی کلی مسیر را توصیف کنند. شکاف داده بین نقاط نمونه گیری مجاور معمولاً با درون یابی خطی پر می شود و مسیر به یک خط چند ضلعی تبدیل می شود. درون یابی اساساً یک تخمین و تقریب داده های از دست رفته است و به ناچار عدم قطعیت را در شکاف بین نقاط نمونه گیری مجاور ایجاد می کند. خطای معرفی شده توسط این روش در این مقاله خطای درون یابی (InE) نامیده می شود.
-
خطای موقعیت یابیبه دلیل محدودیت دقت سنسورهای موقعیت یابی یا شدت سیگنال های مختلف مناطق مختلف، داده های موقعیت یابی نقاط نمونه گیری در یک مسیر معمولاً دارای مقدار مشخصی خطا هستند. به این خطای اندازه گیری نیز می گویند. میانگین دقت مکانی یک گیرنده GPS استاندارد نزدیک به دو متر به صورت افقی در فاصله اطمینان 95% [ 5 ] و در مناطق مسدود به دلیل سیگنال ضعیف بدتر است. در این مقاله، این نوع خطا به عنوان خطای موقعیت یابی (PoE) تعریف شده است.
-
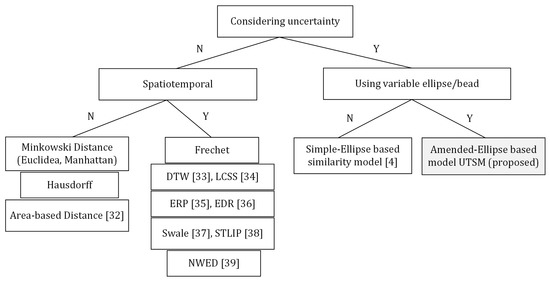
شباهت مسیرمعیار تشابه یا تابع شباهت عموماً یک تابع با ارزش واقعی است که شباهت بین دو شی را کمی می کند. تشابه مسیر به درجه شباهت بین یک جفت مسیر از جمله موقعیت مکانی، روند شکل، ویژگی های حرکت و غیره اشاره دارد که با هم می توانند شباهت کلی حرکت آنها را اندازه گیری کنند. فاصله یک معیار تشابه معمولی است، مانند فاصله اقلیدسی، فاصله هاسدورف، فاصله فریشت و غیره. با این حال، فاصله با شباهت نسبت معکوس دارد. هرچه فاصله بین دو مسیر کمتر باشد، شباهت آنها بیشتر است. همچنین می توان از یک مدل شباهت تعریف شده مصنوعی برای بیان شباهت بین مسیرها استفاده کرد. در کاربردهای عملی، 0،1برای مقایسه ناهمگنعملکرد معیارهای مختلف شباهت مسیر در بخش 3 بیشتر مورد بحث قرار خواهد گرفت .
2.2. بیان مسأله
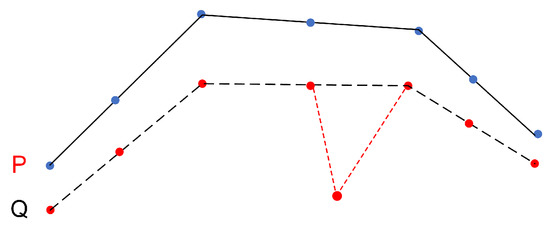
مشکل ما به طور رسمی به صورت زیر تعریف می شود: با توجه به دو مسیر P و Q، یک معیار شباهت نرمال شده با S(P, Q) برای دو مسیر پیدا کنید که شرایط زیر را برآورده می کند:
0<اسپ،س≤1اسپ،س=اسس،پاسپ،پ=1
3. کارهای مرتبط
3.1. مدل های داده مسیر مکانی-زمانی
3.2. عدم قطعیت در مسیرهای مکانی-زمانی
3.3. اقدامات تشابه مسیر
3.3.1. متریک فاصله هندسی
3.3.2. متریک فاصله بر اساس زمان
3.3.3. تشابه معیارهایی که عدم قطعیت را در نظر می گیرند
4. رویکرد پیشنهادی
4.1. مدل بیضی اصلاح شده
4.1.1. مدل اولیه بدون خطای موقعیت یابی
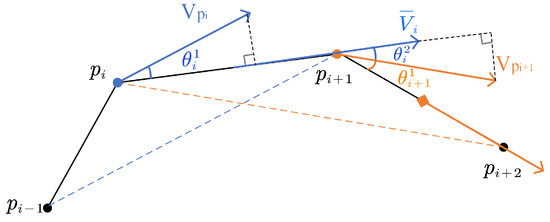
بگیر سهgمترهnتی(پمن،پمن+1)در شکل 5 به عنوان مثال، زاویه چرخش از اختلاف جهت بین سرعت متوسط (بر حسب بردار) به دست می آید. سهgمترهnتی(پمن-1،پمن+1)، سهgمترهnتی(پمن،پمن+1)، و سهgمترهnتی(پمن،پمن+2)، یعنی:
θمن1=∠پمن-1،پمن+1-∠پمن،پمن+1θمن2=∠پمن،پمن+2-∠پمن،پمن+1
که در آن ∠ به معنای زاویه بین بردار و خط افقی است.
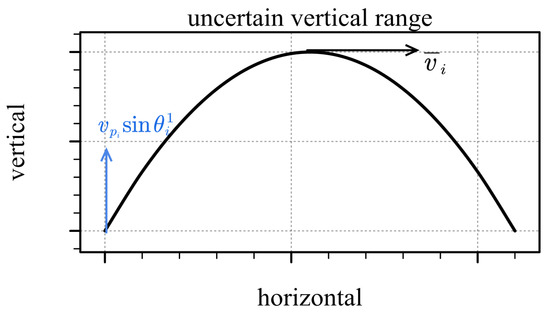
یک فرضیه شهودی این است که محدوده عدم قطعیت عمودی با مولفه سرعت در جهت عمودی متناسب است. همانطور که شکل 6 نشان می دهد، مولفه عمودی سرعت vپمنگناهθمنکمی تواند منجر به فاصله عمودی از 12vپمنگناهθمنک·Δتی2تا زمانی که مولفه به صفر برسد. زمان کاهش سرعت تنظیم شده است Δتی2زیرا جسم متحرک باید به نقطه لنگر برگردد پمن+1. ما می توانیم دو فاصله عمودی نامشخص حاصل از سرعت شروع و سرعت پایان قطعه را بدست آوریم. بنابراین، میتوانیم مقدار محور نیمه فرعی b را با محاسبه میانگین دو فاصله عمودی نامشخص تخمین بزنیم:
ب=12vپمنگناهθمن12·Δتی2+vپمن+1گناهθمن22·Δتی2=18Δتیvپمنگناهθمن1+vپمن+1گناهθمن2
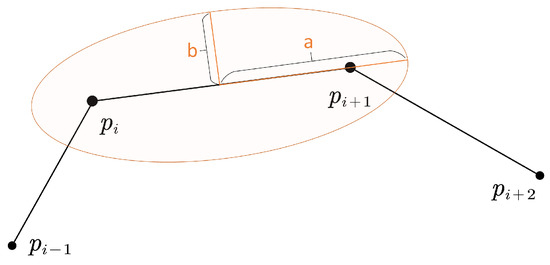
پارامترهای بیضی اصلاح شده بدین ترتیب هستند:
ج=12دهتوجپمن،پمن+1ب=18Δتیvپمن|گناهθمن1|+vپمن+1|گناهθمن2|آ=ب2+ج2
-
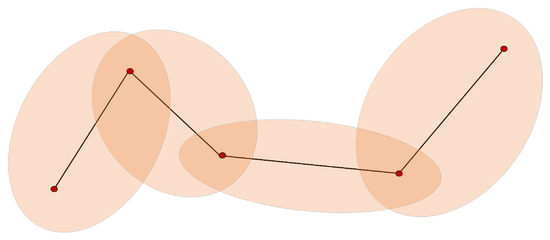
اگر یک قطعه تقریباً با هر دو همسایهاش جهت یکسانی داشته باشد، b آن بسیار کوچک خواهد بود، و گریز از مرکز نسبتاً بزرگ است، به عنوان مثال، ناحیه عدم قطعیت قطعه یک بیضی باریک است ( شکل 7 )، که با معمول ما سازگار است. تصور اینکه جسمی که در یک خط مستقیم حرکت می کند، تمایل به عدم قطعیت مکان کمتری دارد. برای معیار تشابه ارائه شده در بخش زیر، این نوع منحنیهای «مستقیم» به دلیل ناحیه کوچکتر عدم قطعیت، شباهت کمتری با یکدیگر دارند.
-
قطعه ای با زوایای چرخشی بزرگ نسبت به همسایگانش b بزرگتر خواهد داشت که به خروج از مرکز کوچکتر و بیضی گسترده تر کمک می کند ( شکل 8 ). این پدیده همچنین با این درک شهودی مطابقت دارد که جسمی که در زوایای تند حرکت می کند، تمایل به عدم قطعیت مکان بیشتری دارد. برای اندازهگیری شباهت پیشنهادی، این نوع منحنیهای «پیچپیچ» تمایل بیشتری به داشتن شباهت بیشتر با یکدیگر در نتیجه ناحیه همپوشانی بزرگتر از گسترههای عدم قطعیت مجاور دارند.
4.1.2. مدل در نظر گرفتن خطای موقعیت یابی
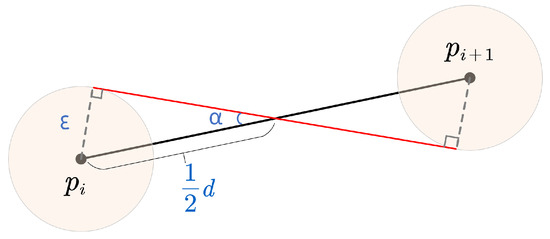
زاویه افست ناشی از خطای موقعیت یابی را می توان با موارد زیر بدست آورد:
گناهα=ε12د=2εد
ما از میانگین دقت مکانی یک گیرنده استاندارد GPS به عنوان خطای اندازه گیری موقعیت استفاده می کنیم، به عنوان مثال، ε=2متر[ 5 ]. در بیشتر موارد، خطا به مراتب کمتر از فاصله بین دو نقطه لنگر متوالی است. 2εدمقدار بسیار کمی است و همینطور است α. با توجه به گسترش سری تیلور:
گناهα=∑ک=0∞-1ک2ک+1!α2ک+1=α-α33!+α55!-…≈α→0α
بنابراین، پارامترهای بیضی اصلاح شده نهایی که هر دو InE و PoE را در نظر می گیرند عبارتند از:
ج=12دهتوجپمن،پمن+1=12دب=18Δتیvپمنگناهθمن1+2εد+vپمن+1گناهθمن2+2εدآ=ب2+ج2
اگر نقاط لنگر بسیار نزدیک به یکدیگر باشند، می توانیم از فرمول اصلی زاویه افست استفاده کنیم α=آرکسین2εد. بنابراین، محور نیمه اصلی b خواهد بود:
ب=18Δتیvپمنگناهθمن1+آرکسین2εد+vپمن+1گناهθمن2+آرکسین2εد
4.2. اندازه گیری تشابه مسیر نامشخص
-
هر مسابقه بین P و Q تأثیر مثبتی بر روی خواهد داشت اس(پ،س).
-
یک تطابق مداوم افزایش بیشتری را به همراه خواهد داشت اس(پ،س).
-
عدم تطابق اثر غیر مثبتی بر اس(پ،س)یعنی بدون اثر یا اثر منفی.
معیار تشابه پیشنهادی ما بر اساس مدل بیضی اصلاح شده به شرح زیر است:
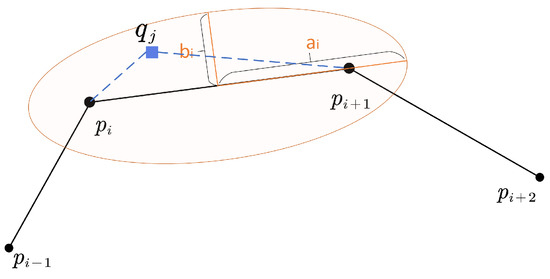
سqj=انقضا-دقیقهf∈پمن،پمن+1دqj،fآمن·کqjکqj=جاریطولازادامه مسابقهqمناستتطبیق0qمناستناهماهنگ
برای هر نقطه لنگر در هر دو مسیر، سهم آن را در شباهت نهایی بر اساس موقعیت و بیضی تطبیق آن محاسبه می کنیم، مانند شکل 10 . سهم نقطه qjبا نشان داده می شود سqj. توجه داشته باشید که سqjحاوی یک ضریب ضرب است که با نشان داده شده است ک(qj)، و به آن ضریب پیوستگی می گویند که از اصل دوم گرفته شده است. ک(qj)برای هر نقطه لنگر به روز می شود تا طول فعلی تطابق ادامه یابد. مقدار اولیه آن صفر است و اگر نقطه فعلی با یک بیضی از مسیر دیگر مطابقت داده شود، یک افزایش می یابد. زمانی که نقطه فعلی با هیچ بیضی مطابقت نداشته باشد به صفر بازنشانی می شود. پس از آن، میتوانیم شباهت غیر عادی را با جمعبندی سهم هر نقطه لنگر به دست آوریم:
اسپ،س=12∑من=0n-1سqمن+∑j=0متر-1سپj
از آنجایی که معیار تشابه منفرد را در یک ضریب پیوستگی ضرب میکنیم، میتوانیم معیار شباهت کلی را با تقسیم حداکثر تداوم عادی کنیم:
ناسپ،س=12∑من=0n-1سqمن/∑من=1n-1من+∑j=0متر-1سپj/∑j=1متر-1j
4.3. الگوریتم ها
| الگوریتم 1: shape_estimator. |
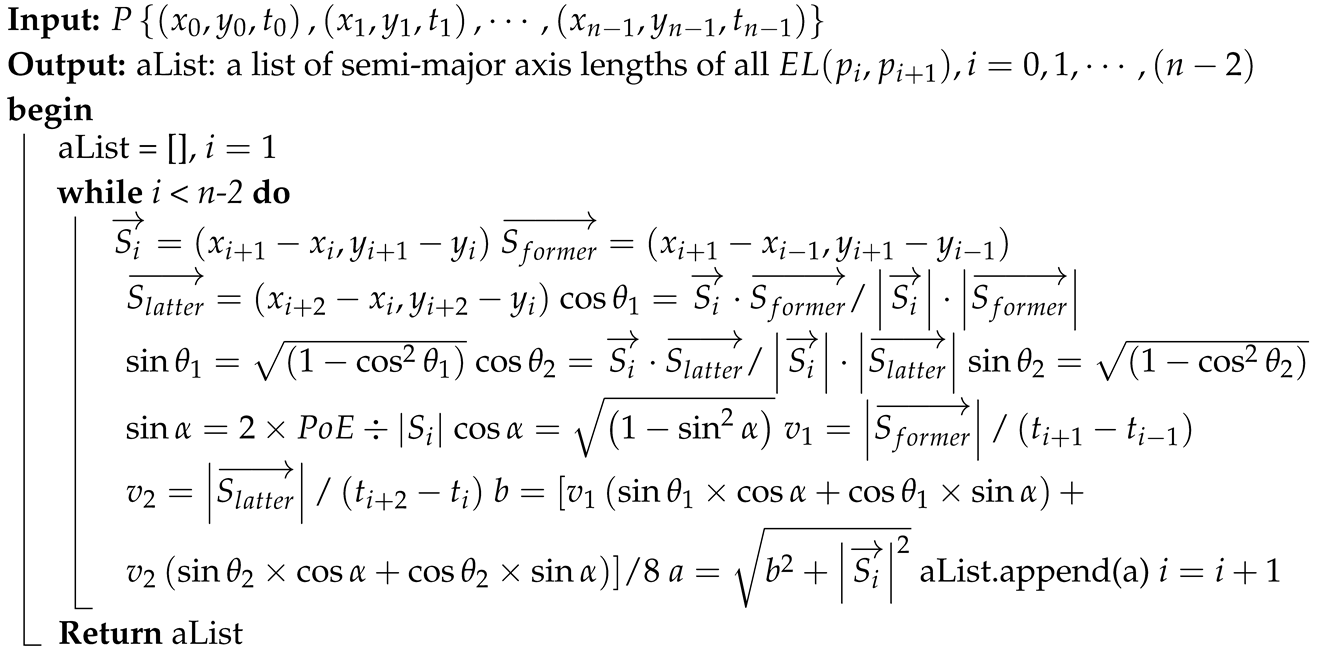 |
| الگوریتم 2: UTSM_calculator. |
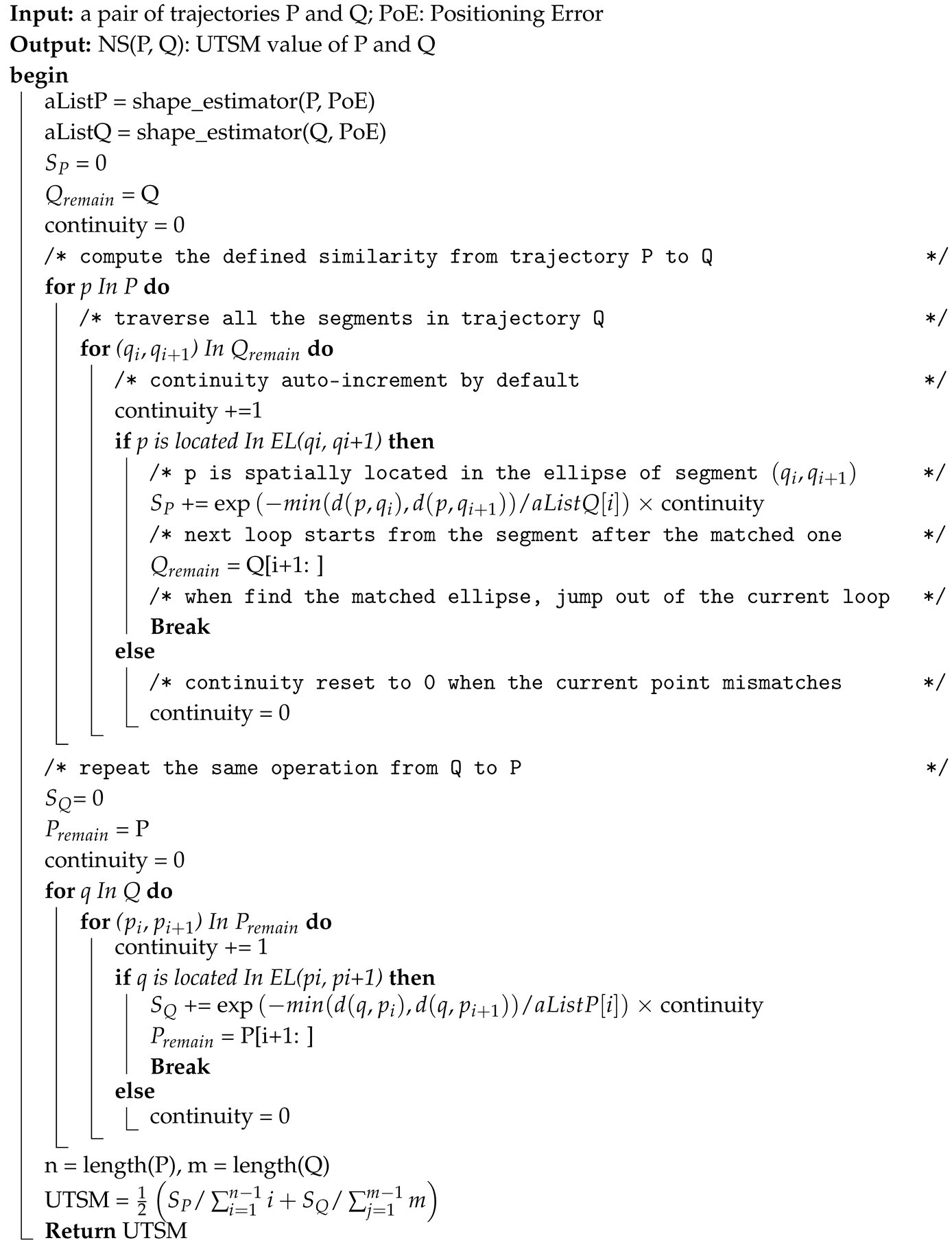 |
5. ارزیابی تجربی
-
ارزیابی اثربخشی UTSM در اندازه گیری شباهت بین مسیرها.
-
استحکام UTSM نسبت به نقاط پرت، نرخهای نمونهگیری مختلف و نمونهگیری ناهمزمان را تأیید کنید.
5.1. تنظیم آزمایش
-
کاداستر دریایی: این مجموعه داده AIS دریایی تقریباً 30 ویژگی را برای 150000 کشتی در سراسر قلمرو ایالات متحده با فرکانس یک خواندن GPS در دو تا 10 ثانیه ثبت می کند. هر مسیر شامل تعداد مختلفی از نقاط لنگر از 10 تا 3000 بود.
-
مجموعه داده T-Drive: این شامل مسیرهای بدون استخوان است که از داده های مسیر واقعی سفرهای تاکسی نیویورک استخراج شده است. داده های نمونه ای که ما استفاده کردیم حاوی بیش از 20000 مسیر بود. هر مسیر شامل 100 تا 500 نقطه لنگر بود.
-
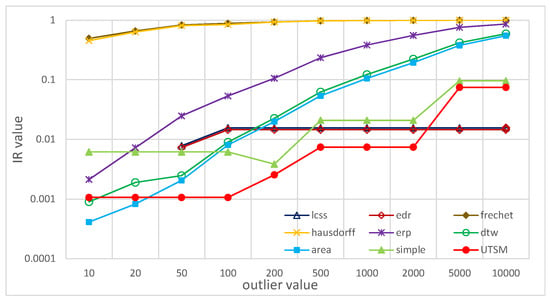
مسیرهای شبیه سازی شده با نقاط پرت: ما برخی از نقاط پرت را به مسیرهای اصلی دنیای واقعی اضافه کردیم.
-
مسیرهای شبیهسازی شده با نرخهای نمونهگیری متفاوت: ما عملیات نمونهگیری مجدد را با فواصل مختلف بر اساس مسیرهای واقعی انتخاب شده انجام دادیم.
-
مسیرهای ناهمزمان مصنوعی: ما به صورت دستی نقاط را به صورت ناهمزمان از منحنی سینوسی در فرکانس های تقلیل ناپذیر نمونه برداری کردیم.
-
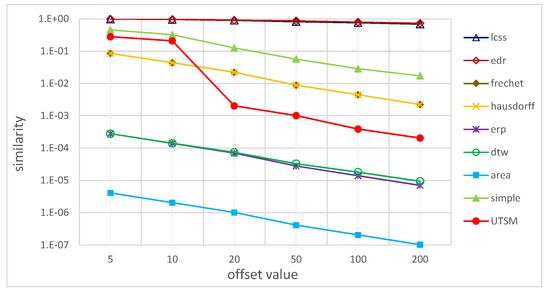
اندازه گیری مبتنی بر فاصله: فاصله Hausdorff، فاصله Frechet، DTW [ 33 ]، LCSS [ 34 ]، ERP [ 35 ]، EDR [ 36 ] و فاصله مبتنی بر ناحیه [ 32 ].
-
اندازه گیری تشابه با در نظر گرفتن عدم قطعیت: شباهت مبتنی بر بیضی ساده [ 4 ].
5.2. ارزیابی و بحث
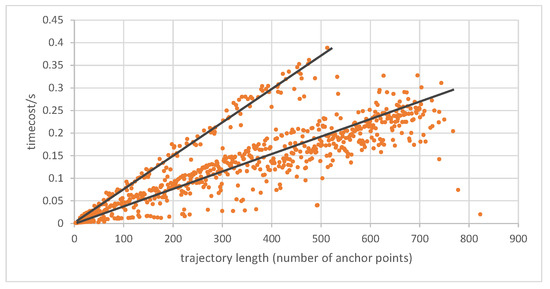
5.2.1. کارایی محاسباتی
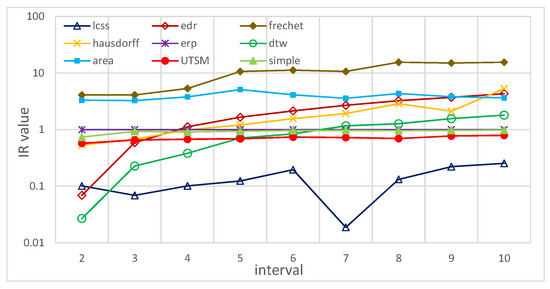
5.2.2. اثربخشی
5.2.3. استحکام نسبت به موارد پرت
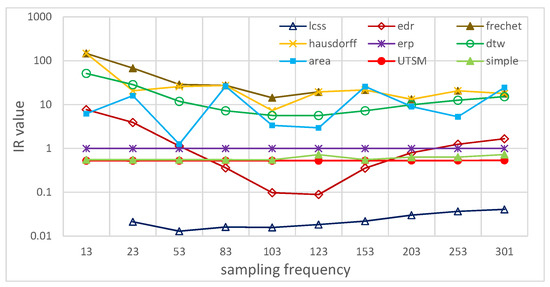
5.2.4. تحمل به نرخ های مختلف نمونه برداری
5.2.5. تحمل به نمونه گیری ناهمزمان
5.2.6. خلاصه
6. نتیجه گیری و کار آینده
منابع
- توهی، ک. داکهام، ام. اقدامات شباهت مسیر. Sigspatial Spec. 2015 ، 7 ، 43-50. [ Google Scholar ] [ CrossRef ]
- راناچر، پ. Tzavella، K. چگونه حرکت را مقایسه کنیم؟ مروری بر اقدامات شباهت حرکتی فیزیکی در علم اطلاعات جغرافیایی و فراتر از آن کارتوگر. Geogr. Inf. علمی 2014 ، 41 ، 286-307. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- یان، ز. پدر و مادر، سی. اسپاکاپیترا، اس. چاکرابورتی، دی. یک مدل ترکیبی و بستر محاسباتی برای مسیرهای فضایی- معنایی. در وب معنایی: تحقیقات و کاربردها ; Springer: برلین/هایدلبرگ، آلمان، 2010; صص 60-75. [ Google Scholar ]
- فورتادو، ع. آلوارس، LOC؛ پلکیس، ن. تئودوریدیس، ی. بوگورنی، وی. آشکارسازی عدم قطعیت حرکت برای تحلیل شباهت مسیر قوی. بین المللی جی. جئوگر. Inf. علمی 2018 ، 32 ، 140-168. [ Google Scholar ] [ CrossRef ]
- تیم محصولات جی پی اس. گزارش تجزیه و تحلیل عملکرد سیستم موقعیت یابی جهانی (GPS) سرویس موقعیت یابی استاندارد (SPS) ; تیم محصول GPS: واشنگتن، دی سی، ایالات متحده آمریکا، 2014. [ Google Scholar ]
- Reap, RM یک مدل مسیر سه بعدی عملیاتی. J. Appl. هواشناسی 1972 ، 11 ، 1193-1202. [ Google Scholar ] [ CrossRef ]
- تریفونا، ن. جنسن، مدلسازی دادههای مفهومی CS برای کاربردهای فضایی و زمانی. Geoinformatica 1999 ، 3 ، 245-268. [ Google Scholar ] [ CrossRef ]
- پدر و مادر، سی. اسپاکاپیترا، اس. Zimányi، E. مدل های مفهومی فضایی-زمانی: ساختارهای داده + فضا + زمان. در مجموعه مقالات سمپوزیوم بین المللی ACM در مورد پیشرفت در سیستم های اطلاعات جغرافیایی، کانزاس سیتی، MO، ایالات متحده آمریکا، 2-6 نوامبر 1999. صص 26-33. [ Google Scholar ]
- کوپر، جی. لیبکین، ال. Paredaens, J. Database Constraint ; Springer Science and Business Media: برلین، آلمان، 2013. [ Google Scholar ]
- اسپاکاپیترا، اس. پدر و مادر، سی. دامیانی، ام.ال. Macedo، JAD; پورتو، اف. وانگنوت، سی. دیدگاه مفهومی در مسیرها. دانستن داده ها مهندس 2008 ، 65 ، 126-146. [ Google Scholar ] [ CrossRef ]
- Hornsby، KS; کول، اس. مدل سازی اجسام مکانی متحرک از دیدگاه مبتنی بر رویداد. ترانس. GIS 2007 ، 11 ، 555-573. [ Google Scholar ] [ CrossRef ]
- لیو، اچ. اشنایدر، ام. اندازه گیری تشابه مسیرهای جسم متحرک. در مجموعه مقالات کارگاه بین المللی Acm Sigspatial درباره ژئواستریمینگ، ردوندو بیچ، کالیفرنیا، ایالات متحده آمریکا، 6 نوامبر 2012. [ Google Scholar ]
- وانگ، اچ. هان، اس. کای، ز. صادق، س. ژو، ایکس. مطالعه اثربخشی بر روی معیارهای شباهت مسیر. در مجموعه مقالات بیست و چهارمین کنفرانس پایگاه داده استرالیا، آدلاید، استرالیا، 29 ژانویه تا 1 فوریه 2013. [ Google Scholar ]
- یینگ، جی جی. لو، ای اچ. لی، دبلیو. ونگ، تی. شباهت کاربر Tseng، VS Mining از مسیرهای معنایی. در مجموعه مقالات دومین کارگاه بین المللی ACM SIGSPATIAL در مورد شبکه های اجتماعی مبتنی بر مکان، سن خوزه، کالیفرنیا، ایالات متحده آمریکا، 2 نوامبر 2010. صص 19-26. [ Google Scholar ]
- هورنسبی، ک. Egenhofer، MJ مدل سازی اجسام متحرک بر روی دانه بندی های متعدد. ان ریاضی. آرتیف. هوشمند 2002 ، 36 ، 177-194. [ Google Scholar ] [ CrossRef ]
- Hägerstraand, T. در مورد افراد در علم منطقه چطور؟ پاپ Reg. علمی 1970 ، 24 ، 7-24. [ Google Scholar ] [ CrossRef ]
- میلر، HJ مدلسازی دسترسی با استفاده از مفاهیم منشور فضا-زمان در سیستمهای اطلاعات جغرافیایی. بین المللی جی. جئوگر. Inf. سیستم 1991 ، 5 ، 287-301. [ Google Scholar ] [ CrossRef ]
- نویتنز، تی. ون دی وگه، ن. ویتلوکس، اف. De Maeyer, P. منشور فضا-زمان مبتنی بر شبکه سه بعدی. جی. جئوگر. سیستم 2008 ، 10 ، 89-107. [ Google Scholar ] [ CrossRef ]
- میلر، HJ نظریه اندازه گیری برای جغرافیای زمانی. Geogr. مقعدی 2005 ، 37 ، 17-45. [ Google Scholar ] [ CrossRef ]
- داونز، جی. بره، دی. هایزر، جی. لورام، آر. اسمیت، ZJ; O’Neal، BM کمی کردن تعاملات مکانی-زمانی حیوانات با استفاده از منشورهای احتمالی فضا-زمان. Appl. Geogr. 2014 ، 55 ، 1-8. [ Google Scholar ] [ CrossRef ]
- آهنگ، ی. میلر، اچ جی; ژو، ایکس. Proffitt, D. مدلسازی احتمالات بازدید در منشورهای زمان شبکه با استفاده از تکنیک های مارکوف. Geogr. مقعدی 2016 ، 48 ، 18-42. [ Google Scholar ] [ CrossRef ]
- کویجپرز، بی. میلر، اچ جی; عثمان، دبلیو. منشورهای جنبشی: گنجاندن محدودیت های شتاب در منشورهای فضا-زمان. بین المللی جی. جئوگر. Inf. علمی 2017 ، 31 ، 2164-2194. [ Google Scholar ] [ CrossRef ]
- Pfoser، D.; جنسن، CS ثبت عدم قطعیت بازنماییهای شی متحرک. در سمپوزیوم بین المللی پایگاه های داده فضایی ; Springer: برلین، آلمان، 1999; صص 111-131. [ Google Scholar ]
- جونگ، اچ. لو، اچ. ساثه، س. Yiu, ML مدیریت عدم قطعیت در حال تحول در پایگاه داده های مسیر. IEEE Trans. دانستن مهندسی داده 2013 ، 26 ، 1692-1705. [ Google Scholar ] [ CrossRef ]
- فرنتزوس، ای. گراتسیاس، ک. تئودوریدیس، ی. در مورد تأثیر عدم قطعیت مکان در پرس و جو فضایی. IEEE Trans. دانستن مهندسی داده 2008 ، 21 ، 366-383. [ Google Scholar ] [ CrossRef ]
- ترایچفسکی، جی. ولفسون، او. Hinrichs، K. چمبرلین، اس. مدیریت عدم قطعیت در پایگاه داده های اشیاء متحرک. ACM Trans. سیستم پایگاه داده (TODS) 2004 ، 29 ، 463-507. [ Google Scholar ] [ CrossRef ]
- ژانگ، ام. چن، اس. جنسن، CS; Ooi، BC; Zhang, Z. نمایه سازی موثر اجسام متحرک نامشخص برای پرس و جوهای پیش بینی. Proc. VLDB Enddow. 2009 ، 2 ، 1198-1209. [ Google Scholar ] [ CrossRef ]
- آهنگ، ی. Miller, HJ شبیه سازی توزیع احتمال بازدید در منشورهای فضا-زمان مسطح. بین المللی جی. جئوگر. Inf. علمی 2014 ، 28 ، 104-125. [ Google Scholar ] [ CrossRef ]
- میلر، HJ Time Geography و Space-Time Prism. در دایره المعارف بین المللی جغرافیا: مردم، زمین، محیط زیست و فناوری ها . وایلی: هوبوکن، نیوجرسی، ایالات متحده آمریکا، 2016؛ صص 1-19. [ Google Scholar ]
- لی، جی. میلر، اچ جی در حال تجزیه و تحلیل دسترسی جمعی با استفاده از منشورهای فضا-زمان متوسط. ترانسپ Res. قسمت D: Transp. محیط زیست 2019 ، 69 ، 250–264. [ Google Scholar ] [ CrossRef ]
- زمستان، اس. یین، ZC عناصر جغرافیای زمانی احتمالی. GeoInformatica 2011 ، 15 ، 417-434. [ Google Scholar ] [ CrossRef ]
- جکل، CF; ونتر، جی. ونتر، نماینده مجلس؛ استاندر، ن. هفتکا، RT اندازهگیری تشابه برای شناسایی پارامترهای مواد از حلقههای پسماند با استفاده از تحلیل معکوس. بین المللی جی. ماتر. فرم. 2019 ، 12 ، 355-378. [ Google Scholar ] [ CrossRef ]
- کیوگ، ای. راتاناماهاتانا، کالیفرنیا نمایه سازی دقیق تاب خوردگی زمانی پویا. دانستن Inf. سیستم 2005 ، 7 ، 358-386. [ Google Scholar ] [ CrossRef ]
- ولاچوس، م. کولیوس، جی. Gunopulos، D. کشف مسیرهای چند بعدی مشابه. در مجموعه مقالات هجدهمین کنفرانس بین المللی مهندسی داده، سن خوزه، کالیفرنیا، ایالات متحده آمریکا، 26 فوریه تا 1 مارس 2002. [ Google Scholar ]
- چن، ال. Ng, R. در مورد ازدواج lp-هنجارها و فاصله ویرایش. در مجموعه مقالات سی امین کنفرانس بین المللی پایگاه های داده بسیار بزرگ – جلد 30، تورنتو، ON، کانادا، 31 اوت تا 3 سپتامبر 2004. صص 792-803. [ Google Scholar ]
- لی، سی. اوزسو، MT; Oria، V. جستجوی شباهت قوی و سریع برای مسیر حرکت جسم متحرک. در مجموعه مقالات کنفرانس بین المللی Acm Sigmod در مدیریت داده ها، بالتیمور، MD، ایالات متحده آمریکا، 14-16 ژوئن 2005. [ Google Scholar ]
- مورس، MD؛ Patel, JM روشی کارآمد و دقیق برای ارزیابی شباهت سری های زمانی. در مجموعه مقالات کنفرانس بین المللی ACM SIGMOD 2007 در مدیریت داده ها، پکن، چین، 12 تا 14 ژوئن 2007. صص 569-580. [ Google Scholar ]
- پلکیس، ن. کوپاناکیس، آی. مارکتوس، جی. نتوتسی، آی. آندرینکو، جی. تئودوریدیس، ی. جستجوی تشابه در پایگاه های داده مسیر. در مجموعه مقالات سمپوزیوم بین المللی در بازنمایی و استدلال زمانی، آلیکانته، اسپانیا، 28 تا 30 ژوئن 2007. [ Google Scholar ]
- دوج، اس. لاوب، پی. ارزیابی تشابه حرکت با استفاده از نمایش نمادین مسیرها. بین المللی جی. جئوگر. Inf. علمی 2012 ، 26 ، 1563-1588. [ Google Scholar ] [ CrossRef ]
- نادریسال، س. کولیک، ال. بیلی، جی. اندازه گیری فاصله موثر و همه کاره برای مسیرهای مکانی و زمانی. حداقل داده دانستن کشف کنید. 2019 ، 33 ، 577-606. [ Google Scholar ] [ CrossRef ]
- باکور، ال. علیمی، ع.م. جان، RI چند یادداشت در مورد معیارهای شباهت فازی و کاربرد در طبقه بندی اشکال تشخیص جملات عربی و موزاییک. بین المللی IAENG جی. کامپیوتر. علمی 2014 ، 41 ، 81-90. [ Google Scholar ]



بدون دیدگاه