

خلاصه
در حال حاضر استفاده از نرم افزارهای رایگان و متن باز در حال افزایش است. انعطاف پذیری، در دسترس بودن و بلوغ این نرم افزار می تواند محرک کلیدی برای توسعه راه حل های مفید و جالب باشد. به طور کلی، راه حل های منبع باز وظایف خاصی را حل می کنند که می توانند جایگزین راه حل های تجاری شوند که اغلب بسیار گران هستند. این حتی در مناطقی که نیاز به تجزیه و تحلیل و دستکاری/تجسم حجم زیادی از داده ها دارند، بیشتر قابل توجه است. با توجه به اینکه شکاف بزرگی در توسعه برنامه های کاربردی وب برای پردازش فتوگرامتری، مبتنی بر فناوری های منبع باز که نتایج باکیفیتی ارائه می دهند وجود دارد، برنامه ارائه شده در این مقاله برای بررسی این جایگاه در نظر گرفته شده است. بنابراین، در این مقاله راه حلی برای پردازش فتوگرامتری بر اساس ادغام نرم افزارهای MicMac، GeoServer، Leaflet و Potree ارائه شده است. معماری پیادهسازی شده، با تمرکز بر نرمافزار منبع باز برای پردازش دادهها و برای دستکاری گرافیکی، تجسم، اندازهگیری و تجزیه و تحلیل، به تفصیل ارائه شده است. برای ارزیابی نتایج تولید شده توسط برنامه وب پیشنهادی، یک مطالعه موردی با استفاده از تصاویر به دست آمده از یک وسیله نقلیه هوایی بدون سرنشین در دو منطقه مختلف ارائه شده است.
کلید واژه ها:
منبع باز ; برنامه وب ; فتوگرامتری ؛ هواپیماهای بدون سرنشین ; MicMac ؛ ژئو سرور ؛ جزوه ; پوتری
چکیده گرافیکی
1. معرفی
در حال حاضر، طیف گسترده ای از روش ها و روش های ژئودتیک برای ثبت وضعیت واقعی اشیاء روی سطح زمین در دسترس است [ 1 ]. فتوگرامتری یکی از این روشهاست که هنر، علم و فناوری کسب اطلاعات هندسی مربوط به اجسام فیزیکی از طریق فرآیندهای ثبت، اندازهگیری و تفسیر عکسها و الگوها در نظر گرفته میشود [2 ] . این فرآیندها شامل تشخیص خودکار نقطه علاقه [ 3 ]، الگوریتمهای ساختار از حرکت (SfM) [ 4 ] و تکنیکهای تطبیق تصویر متراکم [ 5 ] است. برای بهبود و سرعت بخشیدن به پردازش فتوگرامتری، چندین کتابخانه تجاری و منبع باز و قطعات نرم افزار توسعه یافته اند 6][7 ]. در میان پرکاربردترین نرم افزارهای تجاری، Pix4Dmapper (Pix4D SA، لوزان، سوئیس)، Agisoft Metashape (Agisoft LLC، سنت پترزبورگ، روسیه) و DroneDeploy (DroneDeploy، سانفرانسیسکو، CA، ایالات متحده آمریکا) برجسته هستند. برخی از نمونههای نرمافزار و کتابخانههای منبع باز عبارتند از MicMac [ 6 ]، VisualSFM [ 8 ]، Bundler [ 9 ]، Python Photogrammetry Toolbox [ 10 ] و Open Drone Map [ 11 ] که بر اساس تکنیکهای SfM [ 12 ] است. علیرغم در دسترس بودن چندین راه حل برای پردازش فتوگرامتری، هزینه و عملکرد مرتبط با هر راه حل می تواند یک عامل تعیین کننده باشد. 13]]. با توجه به هزینه نرم افزارهای تجاری، قیمت ها متفاوت است، DroneDeploy بهترین گزینه از نظر اقتصادی است. در مقابل، راهحلهای منبع باز رایگان هستند و میتوانند راهحلی قابل اجرا برای چندین کاربر باشند. علیرغم هزینههای بالای مرتبط با نرمافزارهای تجاری، مهم است که در نظر گرفته شود که ارائهدهندگان نرمافزار تمام قابلیتهای مورد نیاز را در یک بسته نرمافزاری واحد در دسترس قرار میدهند، در حالی که نرمافزارهای رایگان و منبع باز (FOSS) معمولاً یک دسته از نرمافزارها را ارائه میدهند. قابلیت ها [ 14 ]. به این ترتیب، توسعه یک برنامه جهانی و کامل شامل استفاده از کتابخانه های متن باز مختلف است که به چالش بزرگی برای توسعه دهندگان تبدیل شده است [ 15 ].
در دهه گذشته، دسترسی به اینترنت از طریق دستگاه ها (کامپیوتر، گوشی های هوشمند و تبلت ها) به طور قابل توجهی افزایش یافته است [ 16 ]. به همین دلیل، بسیاری از سازمان ها اینترنت را به عنوان بستر اصلی راه حل های نرم افزاری، ایجاد نرم افزار به عنوان یک سرویس (SaaS) در نظر می گیرند. این نوع پلتفرم دارای چندین مزیت است و ارزش آن را دارد که توانایی آن در نگهداری و به روز رسانی برنامه ها بدون توزیع و نصب هیچ نرم افزاری بر روی رایانه های مشتری برجسته شود [ 17 ].
با توجه به SaaS فتوگرامتری تجاری، Pix4D Cloud، DroneDeploy و 4DMapper برجسته هستند. برخی از رابط های وب فوتوگرامتری رایگان (به عنوان مثال، ARC 3D Webservice، MiaW، Culture 3D Cloud Platform، CMP SfM web service، 3DNOW) در دسترس هستند. با این حال، فقدان راهحلهای منبع باز وجود دارد که راهحلی کامل و یکپارچه برای پردازش و تجسم تصاویر هوایی بهدستآمده از وسایل نقلیه هوایی بدون سرنشین (پهپادها) ارائه دهد.
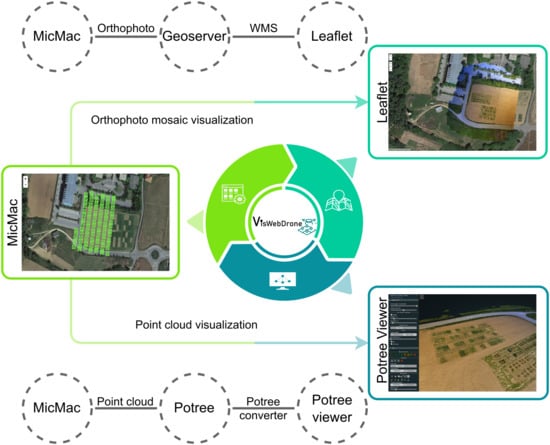
در نتیجه، با توجه به مزایای ذکر شده، هدف تحقیق پیشنهادی ارائه VisWebDrone (پلتفرم وب بصری برای تجزیه و تحلیل تصاویر مبتنی بر پهپاد)، یک برنامه وب برای فتوگرامتری پهپاد مبتنی بر فناوریهای منبع باز است. راه حل پیشنهادی به عنوان یک پلتفرم رایگان و منبع باز نگهداری می شود که در GitHub با تکیه بر مشارکت کاربران در دسترس است. برنامه وب از چندین قطعه نرم افزار منبع باز تشکیل شده است که به طور کامل یکپارچه شده اند و مرحله پردازش داده را با نمایش گرافیکی نتایج ترکیب می کنند. مرحله پردازش داده ها با استفاده از MicMac انجام می شود، در حالی که نمایش گرافیکی نتایج توسط Leaflet و Potree ارائه شده است. چندین راه حل رابط کاربری گرافیکی (GUI) که MicMac را یکپارچه می کند، قبلا توسعه یافته است. از جمله راه حل های توسعه یافته،Center d’études et d’expertise sur les risques, l’environnement, la mobilité et l’aménagemen ) AperoDeDenis را منتشر کرده است ، یک رابط کاربری گرافیکی برای MicMac که در دست توسعه است. رابط کاربری گرافیکی دیگر، InterfaceMicmac، توسعه یافته توسط IGN ( Institut National de l’information geographique et forestière ) متوقف شد. اخیرا، Alessio Calantropio از Politecnico di Torino راه حل GEMINI (رابط جدید MicMac پیشرفته گرافیکی) را توسعه داده است که بر ارزیابی کیفیت نتایج به دست آمده تمرکز دارد. 18]]. اگرچه تمام راه حل های رابط کاربری گرافیکی ارائه شده از خط فرمان انتزاعی ارائه شده توسط نرم افزار MicMac استفاده می کنند، اما هیچ یک از آنها راه حل های گرافیکی برای دستکاری و تجسم نتایج به دست آمده، با استفاده از پردازش فتوگرامتری (به عنوان مثال، تجسم موزاییک های ارتوفتو و ابرهای نقطه ای) در دسترس ندارند. VisWebDrone قصد دارد تا با ارائه ابزارهای مناسب این شکاف را پر کند.
در ادامه این بخش مقدماتی، بخش 2 ساختار و معماری VisWebDrone را تشریح میکند و ماژولها و نرمافزارهای یکپارچه شده در برنامه وب را ارائه میکند. بخش 3 به نمایش راه حل های اجرا شده ارائه شده در بخش 2 اختصاص دارد . سپس، برای مثال زدن و آزمایش عملکردهای برنامه وب، دو حوزه مطالعه در بخش 4 ارائه شده است . در بخش 5 ، نتایج ارائه شده و مورد بحث قرار گرفته است. در نهایت در بخش 6 به نتایج تحقیق حاضر پرداخته شده است.
2. معماری سیستم
مفهوم یک برنامه وب برای دستکاری، تجزیه و تحلیل و تجسم خروجی های تصویر مبتنی بر پهپاد به چهار ماژول نیاز دارد. ماژول 1 وظیفه پردازش فتوگرامتری را بر عهده دارد، تصاویر جمع آوری شده توسط پهپادها را به عنوان ورودی دریافت می کند و به عنوان خروجی یک موزاییک ارتوفتو و یک ابر نقطه متراکم سه بعدی تولید می کند. در مرحله بعد، ماژول 2 برای ذخیره موزاییک orthophoto در یک سرور نقشه استفاده می شود. این ماژول عکس ارتوفتو تولید شده در ماژول 1 را به عنوان ورودی دریافت می کند و چندین سرویس وب را برای انتشار داده های جغرافیایی در دسترس قرار می دهد. ماژول 3 مسئول تجسم موزاییک orthophoto است، با استفاده از یک لایه Web Map Service (WMS) به عنوان ورودی و یک صفحه نقشه برداری وب را برای تجسم ارتوفوتو به عنوان خروجی تولید می کند. در نهایت، ماژول 4 به تجسم و تجزیه و تحلیل ابر نقطه متراکم می پردازد. این ماژول داده های ابر نقطه را دریافت می کند،شکل 1 نمودار جریان ماژول ها را نشان می دهد.
2.1. ماژول 1- پردازش فتوگرامتری
در میان بسته های مختلف فتوگرامتری که به صورت رایگان در دسترس هستند، OpenDroneMap (ODM) و MicMac مناسب ترین گزینه ها برای توسعه برنامه وب پیشنهادی در نظر گرفته شدند. این انتخاب عمدتاً به این دلیل است که هر دو ابزار را یکپارچه می کنند که امکان تولید موزاییک های ارتوفتو و ابرهای نقطه ای را در یک خط لوله فراهم می کند.
ODM یک جعبه ابزار منبع باز مبتنی بر جامعه است که برای پردازش و تجزیه و تحلیل تصاویر هوایی به دست آمده توسط پهپادها توسعه یافته است. این برنامه مبتنی بر خط فرمان بر روی تمام سیستم عامل های اصلی از طریق استفاده از ظرف داکر (Docker, Inc., Palo Alto, CA, USA) اجرا می شود و تحت مجوز GPLv3 [ 19 ] توزیع می شود.
MicMac با مخفف “Multi Images Correspondances par Méthodes Automatiques de Corrélation—Multi Image Match by Automatic Correlation Methods” مرتبط است و توسعه آن در سال 2005 توسط موسسه ملی اطلاعات جغرافیایی و جنگلداری فرانسه (IGN) و مدرسه ملی فرانسه آغاز شد. علوم جغرافیایی (ENSG) [ 6]. MicMac یک نرم افزار منبع باز است که تحت مجوز CeCILL-B توزیع شده است. در ابتدا، به عنوان یک چارچوب زبان نشانه گذاری توسعه پذیر (XML) ارائه شد که به کاربران اجازه می داد پارامترسازی پردازش را تعریف کند. با این حال، در سال 2010، چارچوب XML متوقف شد و جای خود را به یک رابط خط فرمان ساده شده داد که به افزایش استفاده از این نرم افزار منبع باز کمک کرده است. MicMac یک نرم افزار همه کاره است که می تواند در انواع مختلفی از اشیاء، از اشیاء کوچک به دست آمده از چشم انداز زمین تا ساختمان هایی که از منظر هوایی به دست می آیند، استفاده شود. حتی می توان از تصاویر مناطق منطقه ای مانند شهرها یا مکان های طبیعی که از هواپیماهای سرنشین دار یا ماهواره ها به دست آمده است استفاده کرد [ 20 ].
هر دو ODM و MicMac راه حل های رایگان و منبع باز هستند. با این حال، دقت ابرهای نقطه سه بعدی در VisWebDrone حیاتی است و امکان اجرای اندازه گیری های سه بعدی دقیق را فراهم می کند. برای این منظور، یک آزمایش مقایسه ای مقدماتی بین هر دو محلول انجام شد. در ODM، پارامتر عمق نقشه-رزولوشن، چگالی ابر نقطه را با تنظیم وضوح تصاویر نقشه عمقی کنترل می کند. بنابراین، با توجه به پیشنهادات جامعه ODM، مقدار بالاتری برای این پارامتر (1200) تعریف شد. در مورد پارامترهای MicMac، ابزار C3DC با پارامتر BigMac اعمال شد که پیش تنظیم بالاتر 1pt/4px را ارائه می دهد. با در نظر گرفتن نتایج، داده های ابر نقطه ای تولید شده توسط MicMac چگالی نقاط بالاتری (12462884 امتیاز) و همچنین کیفیت و تعریف بهتری را در مقایسه با نتایج ODM ارائه می دهند (10,شکل 2 ابرهای نقطه متراکم ایجاد شده با استفاده از مجموعه داده های تصویری یکسان را در هر دو راه حل نشان می دهد. با توجه به عملکرد هر دو نرم افزار در تولید موزاییک ارتوفتو، نتایج ارائه شده خوب بود و انتظارات را برآورده کرد. بنابراین، به دلایلی که در بالا ارائه شد، MicMac برای انجام پردازش فتوگرامتری انتخاب شد.
2.2. ماژول 2 – Orthophoto Mosaic Storage در یک وب سرور GIS
برای وظیفه ذخیره سازی داده های شطرنجی تولید شده در ماژول 1، دو سرور سیستم اطلاعات جغرافیایی وب (GIS) به عنوان برخی از پرکاربردترین ها در جوامع FOSS، MapServer و GeoServer برجسته می شوند.
MapServer در سال 1996 در دانشگاه مینه سوتا تاسیس شد. این یک پروژه نقشه برداری وب منبع باز است که برای توسعه برنامه های نقشه برداری وب تعاملی و تعاملی طراحی شده است. MapServer از چندین استاندارد کنسرسیوم فضایی باز (OGC) مانند WMS، سرویس ویژگی های وب (WFS) و سرویس پوشش وب (WCS) پشتیبانی می کند و با طیف گسترده ای از فرمت های برداری و شطرنجی سازگار است. این وب سرور به عنوان یک برنامه رابط دروازه مشترک (CGI) با سرورهای وب Apache و Microsoft اجرا می شود [ 21 ].
GeoServer، به نوبه خود، در سال 2001 تاسیس شد، متعلق به گروه آهک، پروژه برنامه ریزی باز، و تحقیقات شکست. این پلتفرم نقش مهمی در مدیریت، ذخیره سازی و ارائه داده های مکانی از طریق اینترنت ایفا می کند. کاربران می توانند داده ها را با استفاده از ابزار مدیریت وب، پایگاه داده یا gsconfig – یک کتابخانه پایتون برای دستکاری یک نمونه GeoServer از طریق GeoServer RESTConfig API، در GeoServer آپلود کنند. به عنوان یک وب سرور، رابطی را ادغام می کند که در آن کاربران می توانند لایه ها را جستجو کنند، به داده های ارائه شده توسط پایگاه داده مراجعه کنند یا خدمات وب مورد استفاده برای اشتراک گذاری داده های شطرنجی و برداری را مدیریت کنند [22] .]. GeoServer دادههای مکانی را بر اساس استانداردهای OGC ارائه میکند: WMS برای نمایش نقشهها بهعنوان تصویر، WFS برای دادههای برداری، WCS برای دادههای شطرنجی، سرویس پردازش وب (WPS) برای فراخوانی خدمات پردازش مکانی، و WFS-T برای نسخهای که امکان ایجاد را فراهم میکند. ، حذف و به روز رسانی ویژگی ها. GeoServer یک سرور RESTful است که در آن هر منبع را می توان با استفاده از یک شناسه منبع جهانی (URI) درخواست کرد که وابسته به وب سرویس تعریف شده است. با توجه به درخواستهای WMS، نقشهها میتوانند در قالبهای مختلفی مانند Geotiff، KML، و گرافیک شبکه قابل حمل (PNG) ارائه شوند. از سوی دیگر، در درخواست های WFS، داده های برداری را می توان در قالب هایی مانند زبان نشانه گذاری جغرافیایی (GML)، GeoJSON و Shapefile [ 23 ] ارائه کرد.
با توجه به مقایسه بین هر دو سرور وب GIS ارائه شده در این بخش، هر دو در استانداردهای OGC پشتیبانی شده مشابه هستند. با این حال، GeoServer WFS-T را ارائه می دهد که برای ویرایش نتایج پردازش ضروری است و امکان ایجاد، حذف و به روز رسانی ویژگی را فراهم می کند. در مقابل MapServer این سرویس مهم را ارائه نمی دهد. علاوه بر این، یکی دیگر از مزیت های مهم GeoServer این است که یک ابزار مدیریت وب در دسترس دارد که تجربه کاربر را بهینه می کند که جستجوی لایه ها، مشاوره داده های ارائه شده توسط پایگاه داده یا مدیریت سرویس های وب مورد استفاده برای به اشتراک گذاری داده های شطرنجی و برداری را ممکن می سازد [24] . ]. به دلایل ذکر شده در بالا، GeoServer به عنوان سرور وب GIS برای ذخیره موزاییک های ارتوفتو انتخاب شد.
2.3. ماژول 3 – تجسم موزائیک ارتوفتو
رابط های برنامه نویسی کاربردی نقشه برداری وب (API) کتابخانه های تابعی هستند که معمولاً مبتنی بر جاوا اسکریپت هستند. این APIها شامل ابزارهایی هستند که ادغام دادهها را که از منابع مختلف ارائه میشوند، از طریق اکتساب، دستکاری و تجسم آنها تسهیل میکنند [ 25 ]. برای تجسم موزاییکهای ارتوفوتو، تولید شده در ماژول 1 برنامه وب پیشنهادی، دو API نقشهبرداری وب که اغلب استفاده میشوند – لایههای باز و برگه – تجزیه و تحلیل شدند. انتخاب این APIهای نقشه برداری وب خاص به دلیل پشتیبانی خوب و مستندات ارائه شده برای توسعه دهندگان است که به افزایش تعداد جوامعی که از این APIها استفاده می کنند کمک می کند.
OpenLayers یک کتابخانه جاوا اسکریپت است که برای ایجاد نقشه وب استفاده می شود. این راه حل یک API جاوا اسکریپت را برای ساخت برنامه های جغرافیایی غنی مبتنی بر وب پیاده سازی می کند که یکی از پرکاربردترین فناوری های منبع باز است. همچنین روشهای استاندارد صنعتی را برای دسترسی به دادههای جغرافیایی، مانند استانداردهای OGC، WMS و WFS پیادهسازی میکند [ 26 ].
Leaflet به نوبه خود شبیه OpenLayers است که یک کتابخانه جاوا اسکریپت است که برای ایجاد نقشه های وب توسعه یافته است. این کتابخانه شامل طیف گسترده ای از توابع است که امکان ایجاد نقشه های وب ساده یا نقشه های وب پیچیده و تعاملی را فراهم می کند که به کاربران امکان تغییر/ویرایش را ارائه می دهد [ 27 ].
با توجه به ویژگیهای هر API نقشهبرداری وب، میتوان به این نکته اشاره کرد که API Leaflet کد بسیار کوتاهتری نسبت به OpenLayers برای انجام همان فرآیند دارد که باعث سریعتر شدن آن میشود. علاوه بر این، Leaflet از OpenStreetMap و همچنین سایر ارائه دهندگان نقشه پشتیبانی می کند. به این دلایل، Leaflet عملی ترین API برای بارگذاری و تجسم موزاییک های ارتوفتو در نظر گرفته شد.
2.4. ماژول 4 – تجسم ابر نقطه سه بعدی
برای اجازه دادن به تجسم ابر نقطه سه بعدی در VisWebDrone، نمایشگرهای ابر نقطه ای تجزیه و تحلیل شدند. علیرغم کمبود نرم افزار FOSS برای این منظور، دو راه حل شناسایی شد: فناوری های Potree و Plasio [ 28 ].
Potree یک رندر ابر نقطه مبتنی بر وب است که اجازه تجسم میلیاردها نقطه را می دهد. انتشار داده های ابر نقطه ای را پس از ارائه در یک صفحه وب، بدون نیاز به وجود نرم افزار اضافی، ساده می کند [ 29 ]. Potree به فناوری WebGL وابسته است، که یک API جاوا اسکریپت سازگار با HTML5 است. WebGL نوعی از OpenGL است اما با مرورگرهای وب سازگار است و به واحد پردازش گرافیکی (GPU) اجازه میدهد تا قابلیتهای رندرینگ در صفحات وب اعمال شود. Potree همچنین به کتابخانه three.js وابسته است که شامل یک کتابخانه رندر است که برای دستکاری نمودارهای صحنه و رسم فراخوان ها استفاده می شود [ 30 ].
Plasio همچنین مبتنی بر فناوری WebGL است، یک نمایشگر ابری نقطه ای مبتنی بر وب است که از فایل های LASer (LAS) و نسخه فشرده آن LASer zip (LAZ) پشتیبانی می کند. برای استفاده از آن برای نمایش فایلهای منفرد، تیم توسعهدهنده آن در حال کار بر روی یک پشته نمایهسازی و رندر چند وضوحی است که روی ابرهای نقطهای بزرگ اعمال میشود [ 31 ].
Potree نرمافزار انتخابی برای تجسم ابر نقطهای بود، زمانی که ثابت کرد قویترین پلتفرم است و مجموعه وسیعی از ابزارها را برای تجسم، دستکاری و تجزیه و تحلیل ابر نقطه ارائه میدهد.
2.5. یکپارچه سازی نرم افزار
برای توسعه برنامه های کاربردی وب، یک معماری انتقال وضعیت نمایندگی (REST) پیاده سازی شد که ارتباطات بین طرف مشتری و سرور را امکان پذیر می کند که از طریق روش های پروتکل انتقال ابرمتن (HTTP) انجام می شود. .]. سمت سرویس گیرنده با رابط برنامه کاربردی وب مرتبط است و مسئول قادر ساختن کاربران به آپلود تصاویر در یک سیستم و تعریف پارامترهای پردازش است. کاربران می توانند خط لوله پردازش فتوگرامتری کاملی را انتخاب کنند که موزاییک ارتوفوتو و ابر نقطه را تولید می کند، یا هر یک را به صورت جداگانه انتخاب کنند. خط لوله پردازش تعریف شده به نوبه خود به عنوان یک درخواست برای سمت سرور ارسال می شود و توالی پردازشی که توسط MicMac انجام خواهد شد را مشخص می کند. این فرآیند از طریق چندین اسکریپت PHP و Ajax اجرا می شود. هنگامی که پردازش دادههای انجام شده توسط MicMac کامل شد، میتوان با استفاده از کتابخانه Python gsconfig، موزاییک orthophoto را که در یک نمونه GeoServer ذخیره میشود، بدست آورد. GeoServer دارای مجموعه ای از خدمات وب در دسترس است که می توان از آنها برای به اشتراک گذاری داده های شطرنجی در برنامه های وب استفاده کرد. در این مورد، WMS از طریق درخواست Leaflet استفاده می شود. ابر نقطه در صفحه وب با استفاده از Potree ارائه می شود. این فرآیند در نشان داده شده استشکل 3 .
رابط برنامه وب قصد دارد یک تجربه کاربرپسند را با ارائه یک طراحی ساده، شهودی و تمیز ارتقا دهد. VisWebDrone از یک بخش برای انتخاب و آپلود تصاویر جمع آوری شده توسط پهپادها ( شکل 4 الف)، بخشی برای انتخاب نوع خروجی برای پردازش ( شکل 4 ب) – موزاییک ارتوفتو، ابر نقطه یا هر دو – و بخش دیگری برای تجسم تشکیل شده است. نتایج پردازش فتوگرامتری ( شکل 4 ج).
3. پیاده سازی نرم افزار
این بخش عملکردهای MicMac، GeoServer، Leaflet و Potree و نحوه پیاده سازی آنها در راه حل VisWebDrone را ارائه می دهد.
3.1. پیاده سازی MicMac
MicMac فتوگرامتری را بر اساس الگوریتم های SfM اجرا می کند که شامل دو مرحله متوالی است. مرحله اول مربوط به تشخیص و تطبیق نقاط اتصال خودکار است در حالی که مرحله دوم با تنظیم بسته نرم افزاری مرتبط است که مربوط به محاسبه مکان های نسبی دیدگاه ها (موقعیت های دوربین) است [33 ] . این مراحل در ابزارهای MicMac که در شکل 4 ارائه شده است، یکپارچه شده اند . MicMac بسیار انعطاف پذیر است و چندین ابزار را ارائه می دهد که می توان آنها را برای تعریف گردش کار کامل و مناسب انتخاب کرد. گردش کار مورد استفاده برای پردازش تصویر ( شکل 5 ) بر اساس مراحل زیر است:
-
نقاط کراوات با استفاده از ابزار Tapioca شناسایی می شوند. این روش بر اساس شناسایی ویژگی های مشترک موجود در تصاویر است. با توجه به زمان محاسبات بالاتر در مجموعههای بزرگ تصاویر، حالت MulScale میتواند زمان پردازش را کاهش دهد، پس از اینکه اولین محاسبه نقاط اتصال با وضوح پایین انجام شد.
-
سپس از تاپاس برای محاسبه جهت گیری نسبی تصاویر، با استفاده از نقاط اتصال شناسایی شده، با محاسبه موقعیت و مدل اعوجاج اپتیک دوربین استفاده می شود.
-
AperiCloud برای تولید یک فایل چند ضلعی (PLY) با موقعیت دوربین ها استفاده می شود.
-
مرحله بعدی می تواند به استفاده از نقاط کنترل زمینی (GCP) بستگی داشته باشد. اگر از CenterBascule موجود استفاده شود، اگر GCPها SaisieAppuisInitQT در نظر گرفته شوند، و ابزارهای GCPBascule را بتوان اعمال کرد، CenterBascule یک جهت گیری نسبی را با استفاده از سیستم موقعیت یاب جهانی (GPS) تبدیل می کند، در حالی که ابزار SaisieAppuisInitQT برای انجام علامت گذاری استفاده می شود. و سپس GCPBascule همان فرآیند CenterBascule را اجرا می کند، اما در این مورد، از GCP ها نیز استفاده می کند. مستندات برنامه وب توضیح می دهد که چگونه کاربران می توانند تصاویر و GCP را برای علامت گذاری انتخاب کنند. برنامه وب ابزار خارجی MicMac را برای انجام علامت گذاری GCP فعال می کند.
-
Campari مسئول تنظیم بسته با استفاده از نقاط اتصال و GCP است.
-
ChgSysCo برای تعریف سیستم مختصات نهایی جهت گیری استفاده می شود. یک فایل XML که کد گروه بررسی نفت اروپا (EPSG) مرتبط با سیستم مختصات را مشخص می کند در این مرحله استفاده می شود.
-
برای به دست آوردن داده های ابر نقطه، ابزار C3DC، ارائه شده توسط پروژه Culture 3D Cloud، استفاده شد [ 34 ]. این ابزار یک تطابق خودکار را محاسبه میکند و یک ابر نقطه را در قالب PLY از مجموعهای از تصاویر جهتدار تولید میکند. ابزار Pims2Mnt مسئول ادغام نقشه های عمق فردی در یک مدل سطح دیجیتال جهانی بود. برای تولید موزاییک ارتوفتو از ابزار Tawny استفاده شد. موزاییک ارتوفتو در قالب TIF تولید شد و بر اساس عکسهای ارتوفتوی فردی [ 35 ] است.
3.2. ادغام GeoServer و Leaflet
ارتباط بین Leaflet (سمت مشتری) و GeoServer (سمت سرور) از طریق استفاده از درخواست های GetMap انجام می شود که برای بارگذاری داده های مکانی ذخیره شده در سرور در صفحه نقشه وب استفاده می شود (شکل 6 ) . مشخصات درخواستهای GetMap توسط کتابخانه Leaflet، با استفاده از استاندارد WMS که بر اساس روشهای HTTP است، تعریف میشوند [ 36 ].
3.3. پیاده سازی Potree
در Potree، مجموعه گستردهای از ابزارها برای پیمایش، اندازهگیری، و تجزیه و تحلیل دادههای ابری نقطهای موجود است که به تقویت این راهحل قدرتمند منبع باز کمک میکند. ابزار Point-Picking برای عملیات ناوبری و تعامل، مانند زوم کردن به یک نقطه یا ایجاد اندازهگیری استفاده میشود. ابزار ناوبری چندین حالت ناوبری را برای تطبیق با همه موقعیت ها ارائه می دهد. حالت اول، OrbitControls، مجموعهای از کنترلها را ارائه میدهد که امکان گردش در اطراف یک هدف یا محور را فراهم میکند. حالت دوم، FirstPersonControls، اجازه می دهد تا تجربه ای شبیه به پرواز یا پیاده روی داشته باشید، که می تواند برای حرکت در فضاهای بسته یا مناظر وسیع بسیار مفید باشد. آخرین حالت، EarthControls، بسیار شبیه به حالت ارائه شده توسط Google Earth است. دکمه سمت چپ ماوس امکان کشیدن و رها کردن حرکات، و دکمه سمت راست ماوس به کاربران اجازه می دهد تا در اطراف مکان های کلیک شده بچرخند. ابزار Clip-Boxes امکان جمعآوری مناطق مورد علاقه را با استفاده از یک کادر برای انتخاب فراهم میکند و فقط ناحیه تعریفشده را برجسته میکند. ابزار اندازه گیری امکان اندازه گیری فواصل، مساحت ها، ارتفاعات و زوایا را فراهم می کند. اقدامات انجام شده را می توان در قالب های JSON یا DXF ذخیره کرد [37 ]. ابزار Height Profile برای تعریف چندین بخش، برای به دست آوردن ارتفاع در مکان های تعریف شده استفاده می شود. در نهایت، ابزار Annotations امکان ایجاد حاشیهنویسی در دادههای ابری نقطهای را فراهم میکند و برخی از نکات جالب خاص را برجسته میکند.
4. مطالعه موردی
برای بررسی و آزمایش عملکردهای اپلیکیشن وب، دو حوزه مطالعه با داده های جمع آوری شده از پهپاد انتخاب شده و در این بخش ارائه می شود. داده ها در محوطه دانشگاه Trás-os-Montes e Alto Douro، ویلا رئال، پرتغال جمع آوری شد. منطقه مورد مطالعه اول مربوط به مجموعه ای از آزمایشات زراعی است، در حالی که منطقه دوم شامل مناطق ساختمانی ( شکل 7). ایده پشت این انتخاب ارزیابی عملکرد راه حل در محیط های روستایی است که موجودیت های هندسی کمیاب هستند و در محیط های نیمه شهری که وجود این ساختارهای هندسی پتانسیل بهبود عملکرد این راه حل ها را دارد. به راحتی قابل تشخیص است بنابراین، عملکرد برنامه پیشنهادی را می توان در اکثر موارد کاربردی معمول آزمایش کرد.
4.1. اکتساب داده ها
این تصاویر با استفاده از یک سیستم هوایی بدون سرنشین تجاری (UAS)، DJI Phantom 4 (DJI، شنژن، چین) به دست آمد. این یک راه حل مقرون به صرفه است که برای اجرای پروازهای دستی یا تمام اتوماتیک، با استفاده از تنظیمات مختلف از طریق مجموعه ای از ایستگاه های بین راه تعریف شده توسط کاربر، آماده شده است. DJI Phantom 4 یک پهپاد مولتی روتور است که مجهز به حسگر RGB با CMOS 1/2.3 اینچی با وضوح 12.4 مگاپیکسل است. فاصله کانونی دوربین 3.6 میلی متر (معادل 35 میلی متر: 20.0 میلی متر) است. تصاویر جمع آوری شده 4000 × 3000 پیکسل هستند و اطلاعات طول و عرض جغرافیایی، طول و ارتفاع توسط گیرنده سیستم جهانی ناوبری ماهواره ای (GNSS) ارائه شده است.
برای منطقه مورد مطالعه اول، 89 تصویر در یک پیکربندی تک شبکه در ارتفاع پرواز 40 متر، با همپوشانی طولی بین تصاویر 80٪ و همپوشانی جانبی 70٪، به دست آمد، در حالی که در منطقه مطالعه دوم یک دوتایی پیکربندی پرواز شبکه در ارتفاع 80 متری (324 تصویر به دست آمده) برنامه ریزی شده بود که یک همپوشانی طولی بین تصاویر 90٪ و همپوشانی جانبی 75٪ ایجاد می کند.
برای تصحیح خطاهای گیرنده GNSS پهپاد، GCPها در سیستم مختصات PT-TM06/ETRS89 با استفاده از گیرنده Mobilemapper 100 GNSS (Ashtech Inc., CA, USA) در حالت RTK به دست آمد و برای تراز کردن تصاویر در طول پردازش فتوگرامتری استفاده شد. . در حوزه مطالعه اول و دوم به ترتیب 8 و 5 GCP بدست آمد.
4.2. پردازش داده ها، تراز کردن، و تجسم
داده های به دست آمده در دو منطقه مورد مطالعه با استفاده از MicMac پردازش شد. با این حال، برای امکان مقایسه با راه حل های تجاری، از نرم افزار فتوگرامتری Pix4Dmapper Pro نیز استفاده شد. بنابراین، مقایسه زمان پردازش و ارزیابی کیفیت موزاییک اصلاحشده و دادههای ابر نقطه ممکن شد. پردازش فتوگرامتری در هر دو راه حل به صورت محلی در همان ایستگاه کاری مجهز به دو پردازنده Intel(R) Xeon(R) E5-2680 v4، دو پردازنده گرافیکی NVIDIA Quadro M4000، 128 گیگابایت رم و یک ترابایت SDD در Windows 10 Enterprise انجام شد. سیستم.
4.2.1. پردازش داده با استفاده از Pix4Dmapper Pro
پردازش فتوگرامتری با استفاده از Pix4Dmapper Pro (نسخه 4.5.6) بر اساس سه فرآیند اصلی بود. در اولین فرآیند (Initial Processing)، دوربین عکاسی دیجیتال کالیبره شد و تصاویر جهت یابی شدند. با توجه به جهت گیری نسبی، نقاط اتصال به طور خودکار از طریق جفت های استریو در مناطق همپوشانی اندازه گیری شد. در مرحله بعد، GCPها به صورت خودکار وارد شده و با تصحیح دستی در موقعیت این نقاط اندازه گیری شدند. پس از نتیجه گیری جهت گیری نسبی، مرحله مثلث بندی هوایی انجام شد. مثلث بندی یک مرحله خودکار بود که در آن نقاط پیوند به سیستم مختصات ژئودتیکی تبدیل شدند. در فرآیند دوم (Point Cloud و Mesh)، ابر نقطه تولید شد که مراحل فیلتر و صاف کردن را برای تعیین چگالی ابر نقطه ترکیب کرد. اجتناب از نقاط پر سر و صدا و اشتباه در فرآیند سوم (مدل سطح دیجیتال (DSM)، Orthomosaic و Index)، تولید DSM و موزاییک orthophoto شامل چندین بخش بود که امکان تعریف قالب داده و مشخصات خروجیها را فراهم میکرد.
4.2.2. پردازش داده با استفاده از MicMac
در ابتدا از نرم افزار ExifTool برای خواندن فراداده های مرتبط با تصاویر جمع آوری شده توسط پهپاد استفاده شد. این دادهها اطلاعات مهمی مانند فاصله کانونی دوربین و ارتفاع مطلق و نسبی و مختصات GNSS را ارائه میدهند که برای مکانیابی هر تصویر در یک نقشه پایه ارائه شده در یک برنامه وب استفاده میشود.
پس از مراحل اولیه، شناسایی نقاط کراوات با استفاده از ابزار تاپیوکا انجام شد. این ابزار نیازمند شناسایی دو آرگومان اجباری، دایرکتوری/مسیر تصاویر و اندازه تصویر، در پیکسل بود. پس از شناسایی نقاط کراوات، ابزار Tapas برای محاسبه جهت گیری نسبی تصاویر و موقعیت و مدل اعوجاج اپتیک دوربین استفاده شد. ابزار Tapas، به عنوان آرگومان های اجباری، به شناسایی مدل کالیبراسیون (FraserBasic) و دایرکتوری/مسیر تصاویر نیاز داشت. در فرآیند بعدی، یک فایل PLY با موقعیت دوربین ها با استفاده از ابزار AperiCloud تولید شد. مرحله زیر شامل استفاده از SaisieAppuisInitQT برای علامتگذاری GCPها، به دنبال ابزار GCPBascule، برای تبدیل جهت نسبی به یک جهت مطلق است. بر اساس داده های GCP سپس، ابزار Campari برای اجرای تنظیم بستهای که با استفاده از موقعیتهای دوربین و نقاط اتصال انجام شده بود، اعمال شد. سپس از ChgSysCo برای تعریف سیستم مختصات نهایی استفاده شد. برای این منظور یک فایل XML که پارامترهای کد EPSG را شناسایی می کرد ایجاد شد. کد تعریف شده EPSG: 3763 (ETRS89/PT-TM06) بود که یک سیستم مختصات رسمی پرتغال و همان GCP است. پس از این مرحله، ابزار C3DC برای انجام یک تطبیق خودکار، تولید یک ابر نقطه ای با چگالی بالا، در قالب PLY، از مجموعه ای از تصاویر جهت دار استفاده شد. در نهایت، پردازش فتوگرامتری توسط ابزار Tawny که برای تولید موزاییک ارتوفتو در قالب TIF استفاده شد، به پایان رسید. سپس از ChgSysCo برای تعریف سیستم مختصات نهایی استفاده شد. برای این منظور یک فایل XML که پارامترهای کد EPSG را شناسایی می کرد ایجاد شد. کد تعریف شده EPSG: 3763 (ETRS89/PT-TM06) بود که یک سیستم مختصات رسمی پرتغال و همان GCP است. پس از این مرحله، ابزار C3DC برای انجام یک تطبیق خودکار، تولید یک ابر نقطه ای با چگالی بالا، در قالب PLY، از مجموعه ای از تصاویر جهت دار استفاده شد. در نهایت، پردازش فتوگرامتری توسط ابزار Tawny که برای تولید موزاییک ارتوفتو در قالب TIF استفاده شد، به پایان رسید. سپس از ChgSysCo برای تعریف سیستم مختصات نهایی استفاده شد. برای این منظور یک فایل XML که پارامترهای کد EPSG را شناسایی می کرد ایجاد شد. کد تعریف شده EPSG: 3763 (ETRS89/PT-TM06) بود که یک سیستم مختصات رسمی پرتغال و همان GCP است. پس از این مرحله، ابزار C3DC برای انجام یک تطبیق خودکار، تولید یک ابر نقطه ای با چگالی بالا، در قالب PLY، از مجموعه ای از تصاویر جهت دار استفاده شد. در نهایت، پردازش فتوگرامتری توسط ابزار Tawny که برای تولید موزاییک ارتوفتو در قالب TIF استفاده شد، به پایان رسید. ابزار C3DC برای انجام یک تطبیق خودکار، ایجاد یک ابر نقطه ای با چگالی بالا، در قالب PLY، از مجموعه ای از تصاویر جهت دار استفاده شد. در نهایت، پردازش فتوگرامتری توسط ابزار Tawny که برای تولید موزاییک ارتوفتو در قالب TIF استفاده شد، به پایان رسید. ابزار C3DC برای انجام یک تطبیق خودکار، ایجاد یک ابر نقطه ای با چگالی بالا، در قالب PLY، از مجموعه ای از تصاویر جهت دار استفاده شد. در نهایت، پردازش فتوگرامتری توسط ابزار Tawny که برای تولید موزاییک ارتوفتو در قالب TIF استفاده شد، به پایان رسید.
4.2.3. تجسم داده ها با استفاده از Leaflet و Potree
پس از تکمیل موفقیت آمیز پردازش داده ها، موزاییک orthophoto با استفاده از کتابخانه gsconfig پایتون در GeoServer آپلود شد. این کتابخانه اجازه پیکربندی خودکار سبک لایه و همچنین تعریف سیستم مختصات نهایی را می داد. هنگامی که این روش به نتیجه رسید، ارتباط بین سرور (GeoServer) و Leaflet با استفاده از سرویس WMS پیاده سازی شد. در کتابخانه Leaflet، مختصات نقشه پایه با توجه به مختصات مرتبط با موزاییک orthophoto همیشه به روز می شد.
با توجه به Potree، ابزار PotreeConverter برای تبدیل ابر نقطه در قالب PLY به یک فایل WebGL HTML بهینه شده برای تجسم و دستکاری داده ها استفاده شد.
4.2.4. تراز داده ها
برای ارزیابی دقت ابر نقطه، میانگین خطا و ریشه میانگین مربعات خطا (RMSE) مانند رابطه (1) با استفاده از Microsoft Excel محاسبه شد. RMSE تفاوت بین مقادیر پیشبینیشده و مقادیر مشاهدهشده مربوطه را اندازهگیری میکند و وزن نسبتاً بالایی به خطاهای بزرگ میدهد. به این ترتیب، RMSE زمانی که خطاهای بزرگ به ویژه نامطلوب هستند، بسیار امکان پذیر است [ 38 ]. معمولاً پروژه های فتوگرامتری نیاز به دقت خوب و وجود خطاهای کمتری دارند. بنابراین، ارزیابی دقت از طریق RMSE ضروری است.
آرماسE =∑من=1nهمن2n
جایی که e i نشان دهنده خطای هر نقطه در یک جهت معین (X، Y، Z) و n تعداد نقاط چک (CPs) است.
5. نتایج و بحث
5.1. نتایج موزاییک ارتوفتو و نقطه ابر
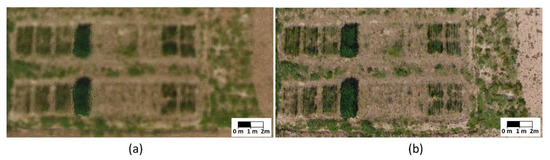
با در نظر گرفتن اولین منطقه مورد مطالعه، موزاییک ارتوفوتو تولید شده ( شکل 8 الف) با فاصله نمونه برداری از زمین (GSD) 1.78 سانتی متر ایجاد شد، که امکان تجسم منطقه بررسی شده را با جزئیات زیاد فراهم می کند. با توجه به منطقه مورد مطالعه دوم، وضوح فضایی کمتری روی موزاییک ارتوفوتو به دست آمد ( شکل 8)ب) با GSD 3.70 سانتی متر. با توجه به مشاهدات موزائیک ارتوفوتو، مشکلات در مناطق انتقالی در منطقه مورد نظر قابل توجه نبود، زیرا مناطق جابجایی را ارائه نمیدهد و تعادل خوبی در سطوح روشنایی در هر دو مورد تأیید میکند. با این حال، در خارج از منطقه مورد علاقه، که در آن تعداد کمتری از تصاویر به دست آمده است، برخی از تغییرات رادیومتری یا رنگ آمیزی بیشتر در نزدیکی مرزها قابل توجه است. این مسائل قبلاً در مطالعات دیگر مشاهده شده بود [ 39 ].
با در نظر گرفتن داده های ابر نقطه ای، در منطقه مورد مطالعه اول ( شکل 9 الف)، در مجموع 12462884 نقطه ایجاد شد. با توجه به داده های ابر نقطه ای تولید شده در منطقه مطالعه دوم ( شکل 9 ب)، در مجموع 15,637,246 نقطه ایجاد شد. هر دو مورد ابرهای نقطه متراکم با کیفیت بالا تولید شدند. با این حال، برخی از نقاط از پوشش گیاهی متراکم بلند در منطقه مورد مطالعه دوم برآورد نشده است.
5.2. تراز داده ها و ارزیابی زمان پردازش فتوگرامتری
میانگین خطا و RMSE در جهت X، Y و Z برای هر دو ناحیه مورد مطالعه محاسبه شد. به این ترتیب چندین نقطه در داده های ابر نقطه شناسایی و مختصات مراکز آنها به دست آمد. سپس این مختصات با GCPهای مربوطه که در میدان با تجهیزات GNSS به دست آمده مقایسه شدند. نتایج ارائه شده توسط MicMac نیز با نتایج بدست آمده توسط Pix4Dmapper Pro مقایسه شد. جدول 1 نتایج مقایسه ای را نشان می دهد.
با توجه به منطقه مطالعه اول، دقت به دست آمده در پردازش انجام شده توسط MicMac کمتر از GSD است، به ترتیب RMSE X = 1.18 سانتی متر، RMSE Y = 0.90 سانتی متر، و RMSE Z = 2.15 سانتی متر. با توجه به نتایج Pix4Dmapper Pro، RMSE در همه جهات کمی پایین تر است، به ترتیب RMSE X = 0.92 سانتی متر، RMSE Y = 0.67 سانتی متر، و RMSE Z.= 1.92 سانتی متر با این حال، این نتایج کارایی MicMac را در پردازش فتوگرامتری اثبات میکند، زیرا نتایج مشابه نتایج بهدستآمده با استفاده از راهحل تجاری است و خطاها زیر GSD هستند. با توجه به حوزه مطالعه دوم، نتایج MicMac همچنان با Pix4Dmapper Pro قابل مقایسه است، و دوباره با یک مزیت جزئی برای راه حل تجاری. با این حال، نتایج MicMac به الزامات با حاشیه زیادی احترام می گذارد. در واقع، MicMac RMSE فردی RMSE X = 1.95 سانتی متر، RMSE Y = 1.55 سانتی متر و RMSE Z = 2.29 سانتی متر را به دست آورد که مطابق با موارد بدست آمده توسط Pix4Dmapper Pro، به ترتیب RMSE X = 1.66 سانتی متر، RMSE Y = 1.43 سانتی متر است. و RMSE Z = 2.17 سانتی متر.
با توجه به ادبیات مربوط به ارزیابی دقت مطلق [ 40 ، 41 ، 42 ]، خطای 1-2 برابر GSD به صورت افقی و 1-3 برابر GSD به صورت عمودی را می توان انتظار داشت، به این معنی که دقت به دست آمده با MicMac مطابقت دارد. با این مقادیر مورد انتظار در این مطالعه، ما به طور هدفمند مناطق مختلط را انتخاب کردیم، جایی که اشیاء انسانی مناطق روستایی را اشغال کردند، تا رفتار جهانی راهحلهای تحلیلشده را ارزیابی کنیم. با این حال، در مطالعات دیگر، که در آن مناطق همگن بیشتری مورد تجزیه و تحلیل قرار گرفت، MicMac دقت خوبی ارائه کرد، در برخی موارد حتی بهتر از راه حل های تجاری [ 43 ، 44 ، 45 ].
ارزیابی مقایسه ای زمان پردازش فتوگرامتری اجرا شده توسط Pix4Dmapper Pro و MicMac نیز انجام شد. زمان اجرای دو راه حل برای انجام دو وظیفه مرتبط در جدول 2 ارائه شده است . پردازش فتوگرامتری با پارامترهای باکیفیت در هر دو نرم افزار انجام شد که به هزینه های محاسباتی بالاتر کمک کرد. با توجه به نرم افزار Pix4Dmapper Pro، زمان پردازش سریعتر بود، زیرا از منابع GPU و CPU استفاده می کرد. از طرف دیگر، MicMac فقط از منابع CPU استفاده می کرد که به زمان پردازش طولانی تر کمک می کرد. علاوه بر این، پیکربندیهای MicMac امکان تشخیص نقاط اتصال بسیار دقیق را فراهم میکنند، که همچنین به زمان صرف شده در پردازش فتوگرامتری کمک میکند [ 39 ، 45]].
در جدول 2 ، زمان پردازش فتوگرامتری متناسب با شماره تصویر موجود در برنامه وب است. با این حال، این پلتفرم با تعداد بالاتری از تصاویر کاملاً کار می کند.
زمان پردازش بالاتر (تقریباً دو برابر زمان) بدست آمده توسط MicMac را می توان از معایب این راه حل در نظر گرفت. با این حال، این نرم افزار رایگان و منبع باز است و نتایج با کیفیت بالا با دقت خوب ارائه می دهد که مطابق با آستانه دقت تعریف شده در ادبیات است.
در طول پردازش فتوگرامتری، Pastis/Tapioca و Apero/tapas کندترین فرآیندهای خط لوله بودند. چندین الگوریتم، مانند OriRedTieP، در حال توسعه هستند و می توانند گردش کار فتوگرامتری را بهینه و بهبود بخشند.
6. نتیجه گیری
انتظار میرود در سالهای آینده، نرمافزارها، خدمات و برنامههای مبتنی بر وب افزایش یابد. برنامه وب توسعهیافته، ارائهشده در این مقاله، صرفاً مبتنی بر فناوریهای منبع باز است و توانایی خود را در تولید راهحلهای امکانپذیر نشان میدهد، تا زمانی که یکپارچهسازی به درستی انجام شود. در مطالعه حاضر، ادغام MicMac، GeoServer، Leaflet و Potree با موفقیت انجام شد.
برنامه پیشنهادی به صورت رایگان در دسترس است و می تواند برای چندین کاربرد در زمینه های آکادمیک یا حرفه ای استفاده شود. کاربران هدف میتوانند تجربه کمی یا بدون تجربه در پردازش فتوگرامتری تصاویر مبتنی بر پهپاد داشته باشند، زیرا رابط کاربری بصری است و کمترین تعامل مورد نیاز است. علاوه بر این، نهادهای عمومی می توانند از استفاده از این برنامه وب بهره مند شوند، زیرا می توان آن را بر روی یک سرور نصب کرد و چندین کاربر می توانند از طریق یک مرورگر وب (یا استفاده از Docker برای یک دستگاه) به آن دسترسی داشته باشند و هزینه های سخت افزار مورد نیاز را به حداقل برساند. برای انجام پردازش فتوگرامتری به صورت محلی.
نمونهای از کاربران بالقوه نیروهای پلیس مسئول بازسازی تصادفات جادهای هستند که میتوانند از پهپادها برای به دست آوردن تصاویر از صحنههای تصادف و پردازش سریعتر آنها و تمرکز بر محصولات نهایی برای تولید طرحهای دقیق و حفظ دیجیتال شواهد استفاده کنند. برای استفاده در آینده این نرم افزار نه تنها به تجسم موزاییک های ارتوفوتو و ابرهای نقطه ای اجازه می دهد، بلکه با قادر ساختن کاربران به انجام چندین اندازه گیری، نتایج را نیز تجزیه و تحلیل می کند.
برنامه وب با تجزیه و تحلیل عملکرد پردازش فتوگرامتری مورد آزمایش قرار گرفت. موزاییک ارتوفوتو تعادل خوبی در روشنایی نشان داد. ابر نقطه، به نوبه خود، تراکم بالایی از نقاط را ارائه می دهد که کیفیت خوبی را نشان می دهد. با توجه به نتایج RMSE بهدستآمده توسط MicMac، آستانههای 1-2 برابر GSD به صورت افقی و 1-3 برابر GSD به صورت عمودی رعایت شد. علاوه بر این، MicMac توانایی ارائه نتایج دقیق را حتی در مقایسه با سایر راه حل های تجاری محبوب، مانند Pix4Dmapper Pro، اثبات کرد.
با توجه به ادغام نتایج بهدستآمده در Leaflet و Potree، این فرآیند با موفقیت کاملاً خودکار اجرا شد و کیفیت و عملکرد خوبی را برای تجسم دادهها نشان داد. توسعه برنامه وب امکان به روز رسانی مداوم را ارائه می دهد. به این ترتیب، قصد مستمری برای ادغام راه حل های منبع باز جدید و محصولات جدید وجود دارد.
منابع
- بارتوش، ک. پوکانسکا، ک. Sabová, J. مروری بر نرم افزار فتوگرامتری منبع باز موجود، استفاده و تجزیه و تحلیل آن. بین المللی J. Innov. آموزش. Res. 2014 ، 2 ، 62-70. [ Google Scholar ]
- Aber, JS; مارزولف، آی. Ries, J. عکاسی هوایی با فرمت کوچک: اصول، تکنیک ها و کاربردهای علوم زمین . الزویر: آمستردام، هلند، 2010; شابک 978-0-08-093283-5. [ Google Scholar ]
- تروخیلو، ال. Olague, G. طراحی خودکار اپراتورهای تصویر که نقاط علاقه را تشخیص می دهند. تکامل. محاسبه کنید. 2008 ، 16 ، 483-507. [ Google Scholar ] [ CrossRef ] [ PubMed ]
- کوپر، SD; روی، DP; Schaaf، CB; Paynter، I. بررسی پتانسیل اسکن لیزری زمینی و فتوگرامتری ساختار از حرکت برای اندازهگیری میدانی سریع غیرمخرب زیست توده چمن. Remote Sens. 2017 , 9 , 531. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- یان، ال. فی، ال. چن، سی. بله، ز. Zhu, R. یک روش تطبیق تصویر متراکم چند نما برای تصاویر هوایی با وضوح بالا بر اساس یک شبکه گراف. Remote Sens. 2016 , 8 , 799. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- روپنیک، ای. دااکر، م. Pierrot Deseilligny، M. MicMac—یک راه حل رایگان و منبع باز برای فتوگرامتری. نرم افزار داده های مکانی را باز کنید. ایستادن. 2017 ، 2 ، 14. [ Google Scholar ] [ CrossRef ]
- Gonçalves، JA; Henriques, R. فتوگرامتری پهپاد برای پایش توپوگرافی مناطق ساحلی. ISPRS J. Photogramm. Remote Sens. 2015 ، 104 ، 101-111. [ Google Scholar ] [ CrossRef ]
- وو، سی. VisualSFM: یک ساختار بصری از سیستم حرکت. در دسترس آنلاین: https://ccwu.me/vsfm/ (در 14 سپتامبر 2020 قابل دسترسی است).
- اسناولی، ن. راهنمای کاربر Seitz، S. Bundler. در دسترس آنلاین: https://www.cs.cornell.edu/~snavely/bundler/bundler-v0.4-manual.html (در 9 سپتامبر 2020 قابل دسترسی است).
- رحمان، ح. قهرمان، E. به سه بعدی یا نه سه بعدی: انتخاب یک گردش کار فتوگرامتری برای گروه های میراث فرهنگی. Heritage 2019 , 2 , 112. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- باز کردن نقشه هواپیمای بدون سرنشین، C. اسناد نقشه هواپیماهای بدون سرنشین را باز کنید. در دسترس آنلاین: https://www.opendronemap.org/ (در 7 سپتامبر 2020 قابل دسترسی است).
- وستوبی، ام جی. براسینگتون، جی. گلسر، NF; هامبری، ام جی; رینولدز، فتوگرامتری «ساختار از حرکت» JM: ابزاری کمهزینه و مؤثر برای کاربردهای علوم زمین. ژئومورفولوژی 2012 ، 179 ، 300-314. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- سواین، NR; لاتو، ک. کریستنسن، SD; جونز، NL; نلسون، ای جی. ایمز، DP; Williams, GP مروری بر راه حل های نرم افزار منبع باز برای توسعه برنامه های کاربردی وب منابع آب. محیط زیست مدل. نرم افزار 2015 ، 67 ، 108-117. [ Google Scholar ] [ CrossRef ]
- اشتاینیگر، اس. Hunter، AJS نقشه نرم افزار GIS رایگان و منبع باز 2012 – راهنمای تسهیل تحقیق، توسعه و پذیرش. محاسبه کنید. محیط زیست سیستم شهری 2013 ، 39 ، 136-150. [ Google Scholar ] [ CrossRef ]
- گکاتزوفلیاس، دی. ملیوس، جی. ساماراس، ز. توسعه یک برنامه GIS وب برای تخصیص فضایی موجودی انتشار بر اساس ابزارهای نرم افزار منبع باز. محاسبه کنید. Geosci. 2013 ، 52 ، 21-33. [ Google Scholar ] [ CrossRef ]
- چوی، ای جی اینترنت اشیا: تکامل به سمت جامعه ای بیش از حد متصل. در مجموعه مقالات کنفرانس مدارهای حالت جامد آسیایی IEEE 2014 (A-SSCC)، KaoHsiung، تایوان، 10-12 نوامبر 2014. صص 5-8. [ Google Scholar ]
- دلی پتروف، بی. جونوسکی، ا. Solomatine، DP توسعه یک برنامه وب برای منابع آب بر اساس نرم افزار منبع باز. محاسبه کنید. Geosci. 2014 ، 62 ، 35-42. [ Google Scholar ] [ CrossRef ]
- کالانتروپیو، آ. Deseilligny، MP; رینادو، اف. Rupnik، E. ارزیابی جهت گیری بلوک فتوگرامتری با استفاده از توصیفگرهای کیفیت از نقاط کراواتی فیلتر شده آماری. ISPRS Int. قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2018 ، XLII-2 ، 185–191. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گروس، AR؛ برتشینگر، تی جی; کومر، سی ام. ارلوین، اس. مونز، ال. فیلیپ، الف. پتانسیل پهپادهای کمهزینه و نرمافزار فتوگرامتری منبع باز برای پایش با وضوح بالا یخچالهای آلپ: مطالعه موردی از کاندرفرن (آلپ سوئیس). Geosciences 2019 ، 9 ، 356. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- مستندات MicMac MicMac، Apero، Pastis و سایر نوشیدنی ها به طور خلاصه! در دسترس آنلاین: https://github.com/micmacIGN/Documentation/blob/master/DocMicMac.pdf (در 27 سپتامبر 2019 قابل دسترسی است).
- Kropla، B. ابتدا MapServer: توسعه GIS منبع باز ; Apress: نیویورک، نیویورک، ایالات متحده آمریکا، 2006; شابک 978-1-4302-0053-6. [ Google Scholar ]
- Iacovella، S. GeoServer راهنمای مبتدیان: به اشتراک گذاری داده های مکانی با استفاده از استانداردهای منبع باز . Packt Publishing: Birmingham, UK, 2017; شابک 978-1-78829-407-2. [ Google Scholar ]
- اشتاینیگر، اس. Hunter، AJS نرم افزار GIS رایگان و متن باز برای ایجاد زیرساخت داده های مکانی. در نرم افزار رایگان و متن باز Geospatial در قرن 21 ; Bocher, E., Neteler, M., Eds. Springer: برلین/هایدلبرگ، آلمان، 2012; ص 247-261. شابک 978-3-642-10594-4. [ Google Scholar ]
- بالاتوره، آ. طاهر، ع. مک آردل، جی. برتولتو، ام. مقایسه فناوریهای مکانی منبع باز برای نقشهبرداری وب. بین المللی J. Web Eng. تکنولوژی 2011 ، 6 ، 354. [ Google Scholar ] [ CrossRef ]
- Bloch, J. چگونه یک API خوب طراحی کنیم و چرا مهم است. همراه با بیست و یکمین سمپوزیوم ACM SIGPLAN در مورد سیستمها، زبانها و برنامههای برنامهنویسی شی گرا ؛ ACM: نیویورک، نیویورک، ایالات متحده آمریکا، 2006; ص 506-507. [ Google Scholar ]
- Orchard، LM (ویرایش) چارچوب های حرفه ای جاوا اسکریپت: نمونه اولیه، YUI، Ext JS، Dojo و MooTools . برنامه نویس Wrox به برنامه نویس; Wiley: Indianapolis، IN، USA، 2009; شابک 978-0-470-38459-6. [ Google Scholar ]
- Cricard, P. Leaflet.js Essentials ; Packt Publishing: Birmingham, UK, 2014; شابک 978-1-78355-482-9. [ Google Scholar ]
- مارتینز-روبی، او. ورهوون، اس. Meersbergen، MV; شوتز، ام. Oosterom، PV; گونکالوس، آر. Tijssen, T. Taming the Beast: تجسم وب ابر نقطه ای عظیم رایگان و منبع باز. گرفتن رئال 2015 . [ Google Scholar ] [ CrossRef ]
- شوتز، ام. Wimmer، M. رندر مبتنی بر نقطه با کیفیت بالا با استفاده از درونیابی سریع تک گذر. در مجموعه مقالات میراث دیجیتال 2015، گرانادا، اسپانیا، 28 سپتامبر تا 2 اکتبر 2015. 2015; صص 369-372. [ Google Scholar ]
- دیشر، اس. ریشتر، آر. Döllner, J. یک رویکرد مبتنی بر webGL مقیاس پذیر برای تجسم ابرهای عظیم نقطه سه بعدی با استفاده از تکنیک های رندر وابسته به معنایی. در مجموعه مقالات بیست و سومین کنفرانس بین المللی ACM در زمینه فناوری وب سه بعدی—Web3D ’18، پوزنان، لهستان، 20–22 ژوئن 2018؛ صفحات 1-9. [ Google Scholar ]
- ورما، یو. باتلر، اچ. پلاسیو. در دسترس آنلاین: https://github.com/verma/plasio (در 19 نوامبر 2019 قابل دسترسی است).
- Masse, M. REST API Design Rulebook: Designing Consistent RESTful Web Service Interfaces ; رسانه O’Reilly: سباستوپل، کالیفرنیا، ایالات متحده آمریکا، 2011; شابک 978-1-4493-1990-8. [ Google Scholar ]
- گالاند، او. برتلسن، اچ اس. گلدسترند، اف. جیرود، ال. یوهانسن، RF; بیوگر، اف. بورچارت، اس. Mair, K. کاربرد نرم افزار فتوگرامتری منبع باز MicMac برای نظارت بر تغییر شکل سطح در مدل های آزمایشگاهی: فتوگرامتری در مدل های آزمایشگاهی. جی. ژئوفیس. Res. زمین جامد 2016 ، 121 ، 2852-2872. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- آلیز، پی. فورج، اف. د لوکا، ال. پیروت-دسیلینی، ام. Preda, M. Culture 3D Cloud: A Cloud Computing Platform برای اسکن سه بعدی، مستندسازی، حفظ و انتشار میراث فرهنگی. در دسترس آنلاین: https://hal.archives-ouvertes.fr/hal-02096629 (در 23 سپتامبر 2020 قابل دسترسی است).
- دوارته، ال. تئودورو، AC; موتینیو، او. Gonçalves، برنامه GIS منبع باز JA برای فتوگرامتری پهپاد بر اساس MicMac. بین المللی J. Remote Sens. 2017 , 38 , 3181–3202. [ Google Scholar ] [ CrossRef ]
- ونندال، بی. بروولی، MA; لی، اس. بررسی نقشهبرداری وب: دورهها، روندها و مسیرها. ISPRS Int. J. Geo-Inf. 2017 ، 6 ، 317. [ Google Scholar ] [ CrossRef ]
- Schuetz, M. Potree: Rendering Large Point Clouds در مرورگرهای وب . Technische Universität Wien: وین، اتریش، 2016. [ Google Scholar ]
- ویلموت، سی. Matsuura، K. مزایای میانگین خطای مطلق (MAE) نسبت به ریشه میانگین مربعات خطا (RMSE) در ارزیابی میانگین عملکرد مدل. صعود Res. 2005 ، 30 ، 79-82. [ Google Scholar ] [ CrossRef ]
- لابه، اس. گومز-کاندون، دی. الناتور، جی. دورادو، جی. فرناندز-کوئینتانیلا، سی. لوپز-گرانادوس، اف. پنا-باراگان، جی.ام. د کاسترو، هوش مصنوعی؛ تورس سانچز، جی. Rabatel, G. موزاییک خودکار تصاویر چندطیفی UAV با وضوح بسیار بالا برای کشاورزی دقیق: تست نرم افزار رایگان MICMAC. در مجموعه مقالات اولین کنفرانس بین المللی RHEA در مورد رباتیک و فناوری های پیشرفته و تجهیزات مرتبط برای کشاورزی، RHEA-2012، پیزا، ایتالیا، 19-21 سپتامبر 2012. ص 269-274. [ Google Scholar ]
- بری، پ. Coakley, R. دقت فتوگرامتری پهپاد در مقایسه با شبکه RTK GPS . بررسی های پایه: کورک، ایرلند، 2018؛ بخش 5. [ Google Scholar ]
- لیو، ی. ژنگ، ایکس. آی، جی. ژانگ، ی. Zuo, Y. ایجاد یک نقشه ارتوفوتوی دیجیتال واقعی با دقت بالا بر اساس تصاویر پهپاد. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 333. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- روزگینه، بی. برتشکا، تی. گچیته، اس. Jakubauskienė، E. Aksamitauskas، V.Č. مدلسازی سطح بر اساس فتوگرامتری پهپاد و برآورد کیفی. اندازه گیری 2015 ، 73 ، 619-627. [ Google Scholar ] [ CrossRef ]
- جاود، م. پاسوت، اس. لو بیویک، آر. دلاکورت، سی. گراندژان، پ. Le Dantec، N. ارزیابی دقت مدلهای سطح دیجیتال با وضوح بالا محاسبهشده توسط PhotoScan® و MicMac® در شرایط بررسی غیربهینه. Remote Sens. 2016 ، 8 ، 465. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- مندز، تی. هنریکس، اس. کاتالائو، جی. ردویک، پی. Vieira, G. Photogrammetry with UAV’s: ارزیابی کیفیت نرم افزار منبع باز برای تولید ortphotos و مدل های سطح دیجیتال. در مجموعه مقالات هشتم کنفرانس ملی کارتوگرافی و ژئودزیا (VIII CNCG)، Reboleira، پرتغال، 29-30 اکتبر 2015; ص 29-30. [ Google Scholar ]
- موتینیو، او. Uma Alternativa منبع باز Para Fotogrametria Com RPAS. پایان نامه کارشناسی ارشد، Faculdade de Ciências da Universidade do Porto، پورتو، پرتغال، 2015. [ Google Scholar ]
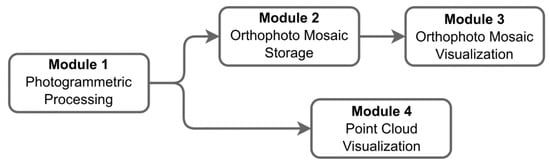
شکل 1. فلوچارت چهار ماژول مورد نیاز برای مفهوم برنامه وب.
شکل 2. ابرهای نقطه متراکم سه بعدی تولید شده توسط نرم افزار پردازش فتوگرامتری رایگان و منبع باز: ( الف ) OpenDroneMap، ( ب ) MicMac.

شکل 3. معماری برنامه وب پیشنهادی.

شکل 4. عملکردهای VisWebDrone و تجسم رابط: ( الف ) آپلود تصاویر. ( ب ) نوع خروجی برای پردازش. و ( ج ) تجسم و تجزیه و تحلیل نتایج.
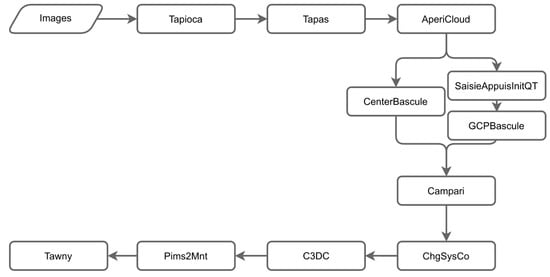
شکل 5. گردش کار MicMac.

شکل 6. ادغام GeoServer و Leaflet.

شکل 7. موقعیت مکان های مطالعه.

شکل 8. موزاییک های ارتوفوتو تولید شده در MicMac در منطقه مطالعه اول ( a ) و منطقه مطالعه دوم ( b ).

شکل 9. تجسم ابر نقطه ای، با استفاده از Potree در منطقه مطالعه اول ( a ) و منطقه مطالعه دوم ( b ).


بدون دیدگاه