1. معرفی
بزرگراه ها یک منبع استراتژیک در یک کشور هستند و اساس توسعه اجتماعی را فراهم می کنند [ 1 ]. با توسعه اقتصاد چین، ساخت بزرگراه پیشرفت زیادی داشته است. تا پایان سال 2017، مسافت پیموده شده کل بزرگراه چین 4773500 کیلومتر بود [ 2 ]. بسیاری از عوامل (مانند دما، رطوبت، هوازدگی و بارها) [ 3 ، 4 ، 5 ] می توانند بر ساختار روسازی تأثیر منفی بگذارند و منجر به انواع مشکلات جاده شوند، که نه تنها بر استفاده عادی از بزرگراه ها تأثیر می گذارد، بلکه منجر به ایجاد بزرگراه ها می شود. زیان های اقتصادی بنابراین، شناسایی نابسامانی روسازی برای پایش وضعیت جاده، نگهداری راه و مدیریت راه اهمیت زیادی دارد [ 6 ، 7]].
بسیاری از شاخصهای ارزیابی (مانند شاخص وضعیت روسازی، شاخص ناهمواری روسازی، شاخص کیفیت سواری، و شاخص مقاومت سازه روسازی) برای اندازهگیری کیفیت روسازی و وضعیت کاربری استفاده شدهاند [8 ، 9 ] . برای به دست آوردن این شاخص ها، اتخاذ رویکردهای قابل اعتماد [ 10 ] ضروری است. روشهای سنتی از اندازهگیریهایی استفاده میکنند که در محل همراه با بررسیها و تفسیرهای بصری انجام میشوند [ 11 ]. این روش ها می توانند داده های دقیق وضعیت سطح روسازی را برای انواع مخاطرات جمع آوری کرده و اطلاعات دقیق و ارزشمندی را ارائه دهند. با این حال، این روش ها دارای معایبی هستند، مانند زمان بر بودن [ 7 ]، گران بودن [ 12]]، کار فشرده [ 13 ] و ذهنی [ 14 ]. به عنوان یک ابزار کارآمد برای رصد زمین، سنجش از دور میتواند اطلاعات طیفی و مکانی مواد جادهای مختلف را برای ارزیابی سریع شرایط جاده شبکههای جادهای بزرگ و بهبود کارایی بررسیهای وضعیت جاده به دست آورد [15 ، 16 ] . بنابراین، مطالعات اخیر [ 17 ، 18 ، 19 ، 20 ] علاقه فزاینده ای به کاربردهای سنجش از دور برای نظارت و مدیریت روسازی نشان داده است.
شواهدی وجود دارد که روسازی مراحل مختلف پیری ویژگیهای طیفی متمایزی را در بازتاب و انتشار نشان میدهد [ 4 ، 21 ، 22 ]. سطوح آسفالتی در طول زمان و از طریق تخریب، قیر خود را از دست می دهند، بنابراین مقادیر بازتاب آنها افزایش می یابد. در نتیجه، روسازی های مراحل مختلف پیری را می توان بر اساس تغییرات در مقادیر بازتاب آنها شناسایی کرد [ 19 ، 23 ]. علاوه بر این، با خراب شدن روسازی آسفالت، توانایی آن در جذب تشعشعات خورشیدی به تدریج ضعیف می شود [ 24] .]. یعنی اطلاعات تابش حرارتی بر اساس شرایط روسازی تغییر خواهد کرد. بنابراین، تحقیقات قبلی بر روی دستیابی به داده های طیفی مقاطع هدف با استفاده از حسگرهای چند طیفی یا فراطیفی و سپس ارزیابی وضعیت استفاده از روسازی با مقایسه و تجزیه و تحلیل ویژگی های طیفی روسازی آسفالتی در سنین مختلف متمرکز بوده است [25 ] . به عنوان مثال، می و همکاران. تجزیه و تحلیل داده های صحرایی و آزمایشگاهی با هدف تمایز سطوح آسفالت شده. داده های هوابرد طیف سنج مادون قرمز و تصویربرداری مرئی (MIVIS) و تصاویر چند طیفی مانند Quickbird و Ikonos استفاده شد. این مطالعه طبقهبندیکننده زاویه طیفی Mapper (SAM) را اتخاذ کرد و دقت کلی 95٪ برای Ikonos، 98٪ برای Quickbird و 93٪ برای MIVIS به دست آورد [23 ]]. پان و همکاران یک مطالعه تجربی از نقشهبرداری شرایط روسازی جاده از WorldView-2 بر اساس تجزیه و تحلیل مخلوط طیفی عضو انتهایی ارائه کرد. تجزیه و تحلیل طیف های اندازه گیری شده در محل روسازی جاده آسفالتی نشان داد که روسازی های آسفالتی در شرایط پیری مختلف الگوهای طیفی کاملاً متفاوتی را در محدوده 0.35 تا 2.5 میکرومتر نشان می دهند. ارزیابی نتایج تجزیه و تحلیل نشان داد که این روش قادر به طبقهبندی روسازی جادهها با دقت کلی 81.71% و ضریب کاپا 0.77 است که از دادههای درجا به عنوان مرجع استفاده شده است [25] .]. با این حال، معایب زیادی برای شناسایی مشکلات روسازی آسفالتی با استفاده از تصاویر سنجش از دور وجود دارد، مانند هزینه بالای جمعآوری دادهها، چرخههای طولانی جمعآوری دادهها و استفاده از حسگرهای راه دور که به اندازه کافی انعطافپذیر نیستند. علاوه بر این، به دلیل شباهت طیفی بین انواع مختلف نابسامانی روسازی، دستیابی به نتایج دقیق تنها با تکیه بر ویژگی های طیفی دشوار است [ 25 ، 26 ].
در واقع، تقریباً تمام شاخصهای ارزیابی وضعیت روسازی فعلی به اطلاعات ارتفاعی نیاز دارند. به عنوان یک روش کارآمد جمعآوری دادههای مکانی، تشخیص و محدوده نور (LiDAR) میتواند اطلاعات فضایی سهبعدی را برای یک بخش جاده به روشی راحت، انعطافپذیر و سریع برای به دست آوردن اطلاعات کلیدی (مانند شیارها، عمق چالهها و جاده فراهم کند. زبری سطح) که برای ارزیابی شرایط روسازی مورد نیاز است [ 27 ]. تلاشهای زیادی با استفاده از دادههای ابر نقطهای LiDAR [ 28 ، 29 ، 30 ] به استخراج و نظارت بر آشفتگی روسازی کمک کرده است. از جمله، [ 28] امکان استفاده از یک سیستم جمعآوری دادههای روسازی مبتنی بر لیزر سهبعدی (3D) برای انجام بررسیهای خودکار ترکخوردگی روسازی را نشان داد. آزمایشهای تجربی بر روی روسازیهای واقعی در گرجستان انجام شد. بر اساس نتایج تجربی، دادههای روسازی لیزری سهبعدی در شرایط نوری مختلف و شرایط کنتراست با شدت کم قوی هستند و قابلیت رسیدگی به آلایندههای مختلف روی سطح روسازی را دارند. [ 29] یک سیستم اسکن سه بعدی بلادرنگ برای بازرسی اعوجاج روسازی معرفی کرد. این سیستم از روش نور ساختاری ساده اما قوی برای تولید پروفایل سه بعدی استفاده کرد. دیسترس اعوجاج روسازی، مانند شیار شدن و راندن، میتواند به طور قابل اعتمادی از پروفیلهای عرضی سهبعدی شناسایی شود و اندازهگیریهای بلادرنگ و تجسم سه بعدی این اعوجاجها را میتوان به سیستم مدیریت روسازی خروجی داد. [ 30] بررسی کرد که چگونه می توان از LiDAR برای شناسایی و تعیین کمیت شدت و پوشش آسیب روسازی برای محاسبه مقادیر مورد نیاز مواد پرکننده استفاده کرد. با این حال، LiDAR سوار بر خودرو اغلب بر ترافیک عادی تأثیر می گذارد و هزینه های پولی و منابع بالایی را متحمل می شود. برای بخشهای جادهای طولانی، فقط میتوان از روش نمونهبرداری استفاده کرد. علاوه بر این، اطمینان از جامع بودن نمونه برداری برای روسازی چند لاین دشوار است. بنابراین، LiDAR سوار بر وسیله نقلیه نمی تواند به سرعت، به طور موثر یا به طور منظم شرایط سلامت روسازی کل بخش جاده را بدست آورد.
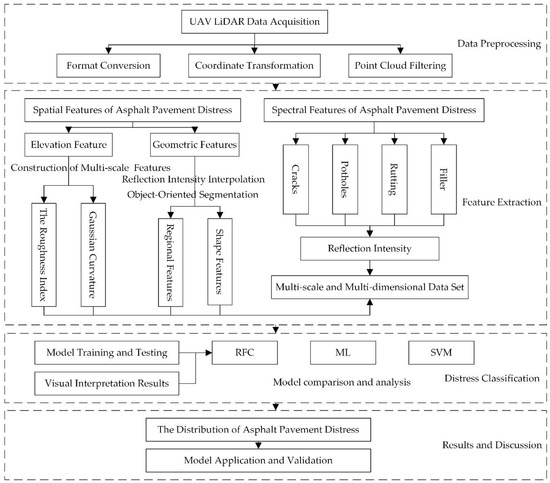
با توسعه سریع فناوری وسایل نقلیه هوایی بدون سرنشین (UAV)، سنجش از راه دور مبتنی بر پهپاد بالغ شده است و به طور گسترده در نظارت بر کشاورزی، زمین شناسی و محیط زیست استفاده می شود [31 ] . پهپاد یک پلت فرم منعطف است که می تواند با سنسورهای مختلف سنجش از راه دور پیکربندی شود که در آن تصاویر دیجیتال رایج ترین نوع داده مورد استفاده هستند. چندین روش [ 25 ، 26 ، 32 ، 33 ، 34 ، 35] که مبتنی بر پردازش تصویر دیجیتال و الگوریتمهای یادگیری ماشینی هستند، برای تشخیص پریشانی روسازی با استفاده از تصاویر با وضوح بالا که از پلتفرمهای پهپاد به دست آمدهاند، پیشنهاد شدهاند. به عنوان مثال، کیم از یک سیستم پهپاد ساده برای گرفتن تصاویر روسازی و شناسایی ترک ها بر اساس روش باینریزه کردن تصویر استفاده کرد [ 32 ]. ژئورگوپولوس ترک های انعطاف پذیر روسازی را با استفاده از ابزارهای پردازش تصویر دیجیتال استخراج کرد [ 36]. با این حال، برخی از توانایی ها و مسائل محدود در این مطالعات رخ داد. به عنوان مثال، برخی از مناطق آسیبدیده (مانند رد تایرها، لکههای روغن و خطوط ترافیک) که با آسیبهای روسازی تقاطع میکنند، از تشخیص آسیب در تصاویر جلوگیری میکنند، زیرا تصاویر جمعآوریشده هیچ اطلاعات عمقی ندارند. علاوه بر این، نظارت ماکروسکوپی روسازی بر اساس روشهای پردازش تصویر، همیشه به تصاویر زیادی نیاز دارد. در مقایسه دو تصویر متوالی، مقادیر پیکسل در یک مکان به دلیل تفاوتهای روشنایی که توسط زوایای مختلف برخورد خورشیدی ایجاد میشود، بایاس دارند. در نتیجه، این منجر به درجاتی از تفاوت بین نتایج تقسیمبندی یک هدف که از تصاویر مختلف به دست میآید [ 25]]. در مقایسه با تصاویر دیجیتال، LiDAR میتواند مستقیماً اطلاعات فضایی سهبعدی روسازی فرسوده را برای اندازهگیری ابعاد هندسی آسیب روسازی به دست آورد و به راحتی میتواند کل روسازی را نظارت کند. علاوه بر این، LiDAR توسط زاویه خورشید محدود نمی شود و می تواند در طول روز و شب اجرا شود [ 7 ]. با روشن شدن این ویژگیهای LiDAR، دادههای ابر نقطه روسازی جمعآوری شد و برای اولین بار تلاش شد تا مشکل روسازی در مطالعه ما شناسایی شود. هدف از این مطالعه توسعه یک رویکرد شناسایی نابسامانی روسازی برای روسازی آسفالتی با استفاده از دادههای ابر نقطه LiDAR است ( شکل 1).). به طور خاص، یک مجموعه ویژگی بهینه مورد مطالعه قرار خواهد گرفت و یک طبقهبندی تصادفی جنگل پیادهسازی و با سایر روشهای طبقهبندی مقایسه خواهد شد تا استحکام RFC در طبقهبندی پریشانی روسازی را نشان دهد.
2. اکتساب داده ها و پیش پردازش
2.1. منطقه مطالعه
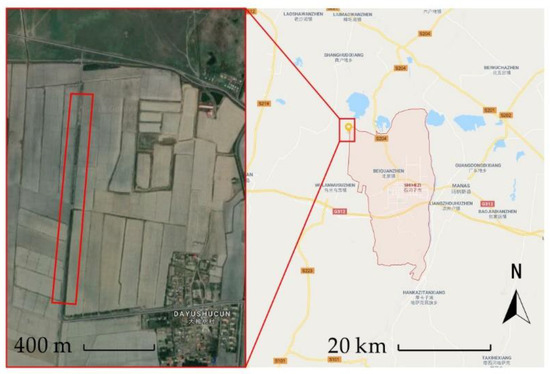
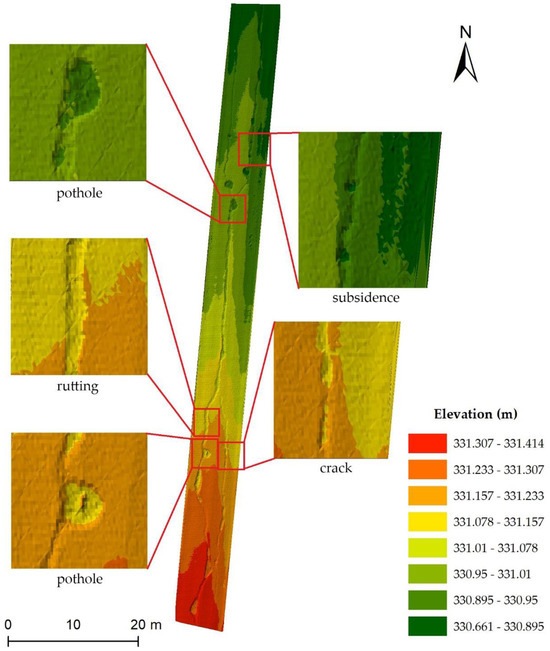
بخش جاده ای که برای این مطالعه انتخاب شده است، بخشی از یک جاده آسفالته در حومه شمالی شهر شیهزی در استان سین کیانگ چین است ( شکل 2) .). روسازی به شدت آسیب دیده است و مصالح بستر جاده در برخی مناطق نمایان شده و با سنگریزه، لس و شن پر شده است. چندین ترک و چاله طولی در امتداد جهت حرکت وسایل نقلیه وجود دارد. به دلیل ویژگی های منحصر به فرد هواشناسی، هیدرولوژیکی و زمین شناسی شیهزی، بستر به اندازه کافی پایدار نیست. درجات معینی از انحراف در طول جاده ظاهر میشود و اتصالات جادهای مانند سنگنماها و علائم جاده آسیب جدی میبینند. وسعت منطقه ای پریشانی روسازی نسبتاً زیاد است، که آن را برای جمع آوری و تجزیه و تحلیل داده ها با استفاده از پهپادهای ارتفاع پایین و داده های ابر نقطه با چگالی کم بسیار مناسب می کند. این منطقه برای توسعه روش استخراج پریشانی روسازی آسفالتی که بر اساس پهپاد LiDAR در ارتفاع پایین و ارزیابی امکانسنجی این روش است، از ارزش بالایی برخوردار است.
2.2. LiDAR اکتساب داده
ما تحقیقات خود را با استفاده از یک پهپاد B1-100 ساخت Scout و یک اسکنر لیزری RIEGL VUX-1LR انجام دادیم ( شکل 3 ). سکوی پهپاد مجهز به سیستم کنترل پرواز INS/GPS بود که تا 31 کیلوگرم بار محموله و دو ساعت دوام پرواز داشت. RIEGL VUX-1LR یک اسکنر لیزری سبک وزن و فشرده با دقت 15 میلی متر است ( https://www.riegl.com/nc/products/airborne-scanning/produktdetail/product/scanner/49/ ). این سنسور جمعآوری دادهها را با سرعت بالا از طریق پرتو لیزر مادون قرمز نزدیک و اسکن خط سریع امکانپذیر میکند، که منجر به اندازهگیری با کیفیت بالا حتی در شرایط بد جوی میشود.
اطلاعات ابر نقطه ای روسازی آسفالت نزدیک روستای دایوشو در حومه شمالی شهر شیهزی را در تاریخ 23 ژوئن 2017 جمع آوری کردیم، روزی آفتابی و بدون باد بود که برای عملیات و پرواز سامانه پهپاد بسیار مناسب بود. در طول این آزمایش، ارتفاع پرواز پهپاد 30 متر، زاویه دید اسکنر لیزری 55 درجه، سرعت پرواز 5 متر بر ثانیه و داده های ابر نقطه اولیه تقریباً 70،000،000 نقطه بود. چگالی نقطه داده های ابر نقطه LiDAR 40/m2 بود . با این حال، دادهها را نمیتوان مستقیماً برای مدلسازی روسازی استفاده کرد، زیرا دادههای ابر نقطه اولیه یک سیستم مختصات زمینمرکزی را اتخاذ کردند و شامل نویز بیش از حد بود. بنابراین، دادههای اصلی باید قبل از استخراج روسازی پیش پردازش شوند.
2.3. پیش پردازش داده های Point Cloud
2.3.1. تولید داده های استاندارد نقطه ابری
ما از نرم افزار پس پردازش RT Post-Process برای تبدیل ابر نقطه به فرمت LAS استفاده کردیم که یک فرمت باینری استاندارد صنعتی برای ذخیره داده های LiDAR در هوا است. دادههای ابر نقطه اولیه شامل دادههایی بود که با استفاده از اسکنر لیزری، موقعیت مسیر پرواز، و دادههای ارتفاعی که توسط IMU/GPS (واحد اندازهگیری اینرسی/GPS) ثبت شده بود، بهدست آمد. پیش پردازش داده ها به دو مرحله تقسیم شد. ابتدا داده های مسیر پرواز IMU/GPS محاسبه و برش داده شد. متعاقباً، ابر نقطه اصلی با استفاده از داده های مسیر بریده شده تقسیم شد.
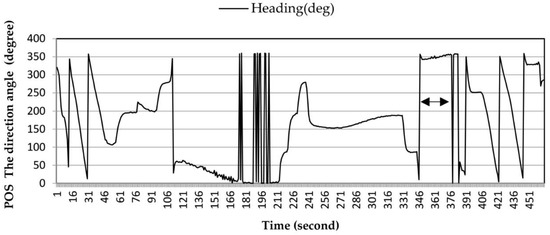
داده های ابر نقطه ای که برای آزمایش انتخاب شدند بین 346 ثانیه و 376 ثانیه، با طول کل تقریباً 150 متر بودند. همانطور که در شکل 4 نشان داده شده است ، جهت پرواز پهپاد در این بازه زمانی نسبتاً پایدار بود (با فلش دو نشان داده شده است). همانطور که در بخش 2.2 ذکر شد ، ارتفاع پرواز پهپاد در طول پرواز 30 متر تعیین شد. قالب داده های ابر نقطه بریده شده به عنوان LAS و سیستم مختصات به عنوان WGS84 تنظیم شد.
2.3.2. فیلتر نقطه ای ابر
در طول فرآیند جمعآوری دادهها، پالسهای لیزر میتوانند به برگهای پوشش گیاهی یا شیشه وسایل نقلیه نفوذ کنند تا پژواکهای بازتابی متعددی را ایجاد کنند. بنابراین، انجام فیلترینگ ابر نقطه ای برای بازیابی توزیع معقول ابر نقطه در فضا ضروری بود.
فرآیند فیلترینگ ابر نقطه ای به سه مرحله برای حذف داده های پرت، نویز و داده های اضافی تقسیم شد. ابتدا، ما از ابزار طبقهبندی نرمافزار RT Post-Process برای جمعآوری نقاط پرت از تجسم ابر نقطهای استفاده کردیم و آنها را از دادههای ابر نقطه استاندارد حذف کردیم. بیشتر این نقاط پرت ناشی از انعکاس و پراکندگی گرد و غبار هوا بر روی لیزر و اثر انعکاس اجسام آب بر روی لیزر است. بنابراین، مقادیر ارتفاعی آنها کمتر یا بیشتر از ارتفاعات همسایگی آنها بود. پس از آن، لازم بود تا صدای نزدیک پوشش گیاهی و وسایل نقلیه ای که به دلیل انعکاس های متعدد ایجاد می شد فیلتر شود. در اینجا، ما یک الگوریتم فیلترینگ ابر نقطه ای مبتنی بر آماری را برای حذف نقاط نویز [ 37] اتخاذ کردیم.]. الگوریتم فرض میکند که دادهها توسط یک فرآیند تصادفی تولید میشوند، و معمولاً، یک توزیع احتمال شکل بسته برای دادهها مناسب است. هر نمونه داده ای که بعید است از فرآیند تصادفی تخمین زده شده تولید شود، به عنوان نویز گزارش می شود [ 37 ]. در نهایت، مقدار زیادی از داده های اضافی وجود داشت که باید از هر دو طرف جاده، از جمله زمین های زیر کشت، محصولات زراعی و پوشش گیاهی حذف می شد. داده های اضافی را می توان با فیلتراسیون ارتفاع و زاویه اسکن حذف کرد. بر اساس داده های اندازه گیری شده، ارتفاع قطعه جاده انتخابی بین 340 متر تا 343 متر بوده است. علاوه بر این، محدوده زاویه اسکن تقریباً 25 درجه محاسبه شد. بنابراین، پارامترهای فیلتر ارتفاع ( آلمن) و زاویه اسکن ( θ) به شرح زیر بودند:
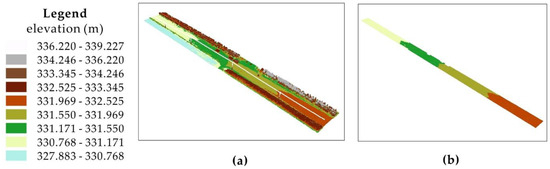
پس از اتمام فیلترینگ ابر نقطه ای، داده های ابر نقطه ای می توانند برای استخراج و طبقه بندی ویژگی ها استفاده شوند ( شکل 5 ).
ابر نقطه روسازی را به طول تقریبی 150 متر بدست آوردیم. برای تأیید اثربخشی و پایداری روش ما، ابر نقطه به دو بخش تقسیم شد: دادههای تجربی و دادههای اعتبار. داده های تجربی تقریباً 90 متر شامل تقریباً 900000 نقطه پالس لیزر بودند و این بخش جاده آسیب جدی تری دید. دادههای اعتبارسنجی تقریباً 45 متر، شامل تقریباً 400000 نقطه پالس لیزر بود، و از آنها برای اعتبارسنجی کاربرد و پایداری روش برای بخشهای مختلف جاده با شرایط مختلف استفاده شد.
3. استخراج ویژگی چند بعدی و چند مقیاسی
3.1. ویژگی ارتفاع
عوامل زیادی (از جمله تبخیر اجزای سبک، پیری نور، تغییرات دما، تغییرات رطوبت، و بار وسیله نقلیه) میتوانند منجر به پیری روسازی آسفالت شوند و میتوانند باعث ایجاد مشکلات مختلفی در روسازی شوند، مانند ترکها، چالهها، نشست و شیار. 38 ]. انواع مختلف دیسترس روسازی آسفالتی تفاوت آشکاری در ارتفاع دارند. در اینجا، ما یک تحلیل کیفی بر اساس مدل شبکه نامنظم مثلثی (TIN) جاده انتخاب شده برای تشریح تفاوت ارتفاع انواع مختلف پریشانی روسازی ارائه میکنیم. همانطور که در شکل 6نشان می دهد که چندین ترک و چاله در بخش جاده وجود دارد. ارتفاع ترک ها و چاله ها کمتر از روسازی های سالم است، در حالی که تغییرات ارتفاعی در مناطق فرونشست کمتر از چاله ها است. این تفاوت به این دلیل است که مخلوطهای آسفالتی روی سطح زیرین در چالهها فرسوده شده و بستر جاده در معرض دید قرار میگیرد. اگرچه فرونشست نیز مشهود است، اما لایه مخلوط آسفالت به طور کامل از بین نمی رود. چاله ها اغلب با مواد دیگر پر می شوند و بنابراین، ویژگی های طیفی معمولی متفاوت از روسازی های سالم را نشان نمی دهند. با این حال، ویژگی های فضایی (دایره یا بیضی شکل) چاله ها منحصر به فرد و آشکار است. بنابراین، ویژگی ارتفاع برای طبقه بندی نابسامانی روسازی بعدی از اهمیت بالایی برخوردار است.
3.2. ویژگی های آماری چند مقیاسی ارتفاع
مشکلات روسازی اغلب گروه های نقطه ای جدا شده یا نقاط منفرد در یک مقیاس اندازه گیری مشخص هستند. ایجاد یک مدل در مقیاس میکرو در نزدیکی این نقاط برای استخراج موثر ویژگی ها ضروری است. برای انواع مختلف دیسترس روسازی، مقیاس اندازه گیری بهینه که برای استخراج ویژگی مورد نیاز است متفاوت است. در نتیجه برای به دست آوردن ویژگی های جامع و دقیق آسیب روسازی، نیاز به استخراج و تجزیه و تحلیل ویژگی های نابسامانی روسازی در مقیاس های چندگانه داریم. برای ساخت ویژگی های ابر نقطه روسازی چند مقیاسی، باید یک ساختار سلسله مراتبی بر روی داده های ابر نقطه روسازی بسازیم تا به انتقال اطلاعات ویژگی بین مقیاس های مختلف دست یابیم. متداول ترین روشی که استفاده می شود تبدیل داده های ابر نقطه ای به تصاویر با وضوح بالا و ساخت ویژگی های تصویر چند مقیاسی با استفاده از روش تبدیل مقیاس مبتنی بر پیکسل است. رویکرد تبدیل مقیاس مبتنی بر پیکسل ساده و آسان برای استفاده است. با این حال، نمی تواند به طور موثر از اطلاعات همسایگی فضایی موجود در ابر نقطه اصلی استفاده کند. بنابراین، ما ویژگیهای آماری چند مقیاسی را مستقیماً از مقیاسهای همسایگی مختلف با استفاده از ابر نقطه اصلی به جای یک واسطه استخراج کردیم، که از از دست رفتن اطلاعات جلوگیری میکند.
برای تعریف مقیاسهای اندازهگیری معقول، ما پارامترهای هندسی چند نوع مشکل روسازی معمولی را در جاده انتخابی جمعآوری کردیم ( جدول 1).). با اندازه گیری پارامترهای هندسی، متوجه شدیم که پارامترهای هندسی چاله ها و فرونشست بیش از حد بزرگ بوده و میانگین مقیاس هندسی 50 سانتی متر است. اگرچه عرض برخی از ترکهای طولی و عرضی تقریباً 1 تا 3 سانتیمتر است، اما این ترکها را نمیتوان در دادههای ابر نقطه با چگالی کم بیان کرد زیرا حداقل فاصله دادهها تقریباً 5 سانتیمتر است. هنگام در نظر گرفتن محدودیت در کیفیت داده ها، ناراحتی جزئی در این مطالعه اولویت ندارد. در جهت عمودی، دقت ارتفاعی بین 5 میلی متر و 10 میلی متر بود. بنابراین، تنوع ارتفاعی در انواع شدید پریشانی، مانند چاله ها، قابل استخراج است. بنابراین، برای استخراج ویژگیهای آماری چند مقیاسی که با روسازی هدف سازگارتر است، پارامترهای چند مقیاسی بهصورتی که درجدول 2 .
ما میتوانیم ویژگیهای میکروسکوپی مختلف را در نزدیکی یک آسیب روسازی در مقیاس میکروسکوپی استخراج کنیم و روند تغییرات در کل روسازی را در مقیاس ماکروسکوپی بیان کنیم. با توجه به ایده های فوق، یک شاخص زبری چند مقیاسی و انحنای گاوسی محاسبه شد.
(1) شاخص زبری
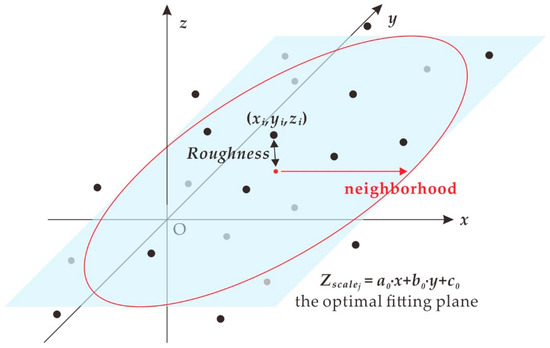
شاخص زبری به طور گسترده ای در استخراج ویژگی با استفاده از ابر نقطه LiDAR استفاده می شود [ 39 ، 40 ]. شاخص زبری سنتی به عنوان نسبت مساحت سطح مدل سطح دیجیتال (DSM) به مساحت سطح مدل رقومی ارتفاع (DEM) تعریف می شود. با این حال، این تعریف در طول فرآیند تولید DSM/DEM و محاسبه مساحت سطح DSM/DEM در معرض از دست دادن دقت درجه دوم است. برای کاهش افت دقت، تعریف زیر را اتخاذ کردیم: شاخص زبری یک نقطه برابر است با فاصله بین نقطه و صفحه، که صفحه برازش بهینه نقطه و نقاط مجاور آن در یک همسایگی خاص است (شکل 7) .). محدودیت خطای صفحه برازش بهینه بر اساس روش برآورد حداقل مربعات است. بیان شاخص زبری به صورت زیر است:
جایی که (ایکسمن،yمن،zمن)مختصات فضایی نقطه پالس لیزر i است و زسجآلهjصفحه برازش بهینه نقطه پالس لیزر i و نقاط اطراف آن در مقیاس j است .
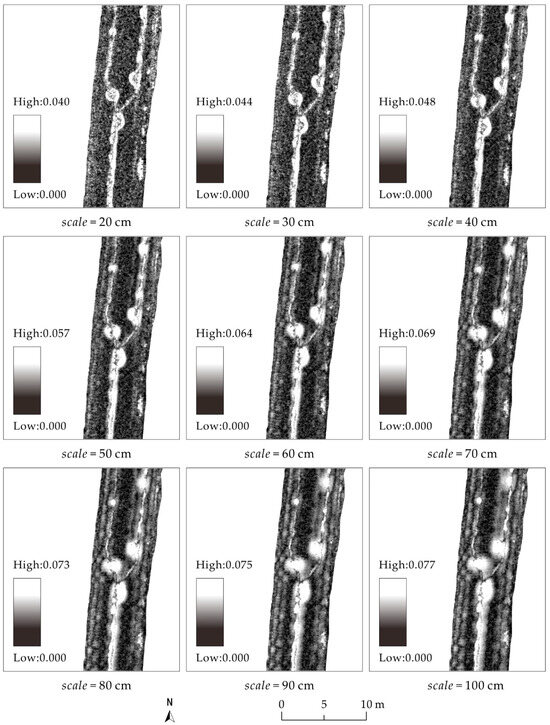
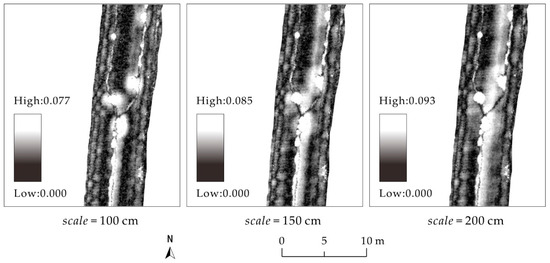
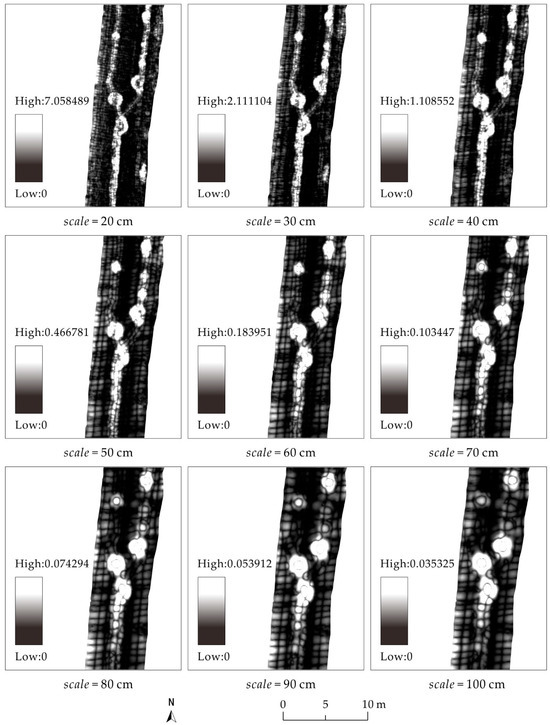
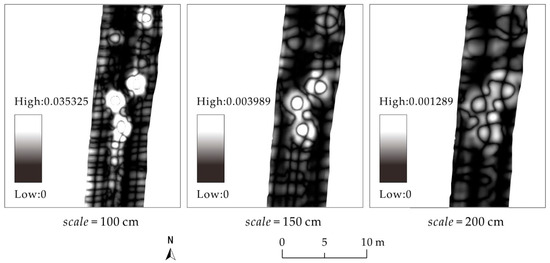
همانطور که در شکل 8 نشان داده شده است ، ریزساختار پریشانی روسازی به خوبی در مقیاس های میکروسکوپی بیان شده است. از آنجایی که ارتفاع متفاوت است، شاخص زبری در لبه مشکل روسازی بسیار بیشتر از سایر مناطق است. در مقیاس اندازه گیری کوچک، مخلوط آسفالتی در وسط چاله ها به طور کامل از بین می رود و به دلیل عدم وجود پرکننده، شاخص زبری نسبتاً پایین است. در مقیاس اندازهگیری بزرگ، اگرچه وسط چالهها نسبتاً مسطح است، اما شاخص زبری همچنان بالا است و ویژگیهای پریشانی روسازی بیان میشود. در چندین مقیاس اندازه گیری بزرگ ( شکل 9برخی از روسازیهای آسیبدیده نیز به دلیل نزدیکی به مناطق آسیبدیده جدی از شاخصهای ناهمواری بالاتری برخوردار هستند که نشاندهنده حساسیت شاخص ناهمواری به آمار محلهها و همچنین هشداری اولیه برای خطر نابسامانی روسازی است. در حالی که با توجه به اینکه مقیاس اندازهگیری بهینه مورد نیاز برای استخراج ویژگی برای انواع مخاطره متفاوت است، ساخت شاخصهای زبری چند مقیاسی یک رویکرد امیدوارکننده برای نمایش جامع و دقیق ویژگیهای نابسامانی روسازی است.
(2) انحنای گاوسی
وقوع نابسامانی روسازی فرآیندی از فرسایش تدریجی روسازی بدون آسیب است. تغییرات ارتفاعی در روسازی منعکس کننده ویژگی های گرادیان در مقیاس اندازه گیری معین است. بنابراین، ما از انحنای گاوسی برای استخراج نابسامانی روسازی استفاده کردیم. بر اساس نظریه گاوس Egregium [ 41 ]، انحنای گاوسی مستقل از موقعیت جاسازی آن در فضا است. بنابراین، استفاده از انحنای گاوسی میتواند از تأثیر تغییر موقعیت مکانی در برازش سطح درجه دوم در محاسبه انحنا در هنگام تغییر مقیاس اندازهگیری جلوگیری کند.
همانطور که در شکل 10 نشان داده شده است ، مخلوط آسفالتی در شرایط فرونشست به طور کامل از بین نمی رود. سطح این نواحی بسیار نزدیک به یک سطح کروی یا استوانه ای است که بیان موثری در نمودار توزیع انحنای گاوسی در مقیاس میکروسکوپی دارد. سطح میانی چاله ها نسبتاً یکنواخت است و ویژگی های یک هواپیما را نشان می دهد. بنابراین، انحنای گاوسی بسیار کوچک است و شبیه به شاخص زبری است. با این حال، بر خلاف شاخص زبری، که به راحتی تحت تاثیر ارتفاع همسایگی در مقیاس ماکروسکوپی قرار می گیرد، انحنای گاوسی را می توان برای استخراج توزیع پریشانی چاله در مقیاس اندازه گیری بزرگ استفاده کرد (شکل 11) .، حتی زمانی که پریشانی جدی است یا منطقه بزرگ است. در مقیاس اندازه گیری بزرگ، چاله های با آسیب های سنگین تر را می توان به طور موثر استخراج کرد. در همین حال، روسازی بدون آسیب مجاور انحنای زیادی از خود نشان نمی دهد. بنابراین، با ساخت و تجزیه و تحلیل انحنای گاوسی چند مقیاسی روسازی در فضای سه بعدی، می توان به طور موثر انواع دیسترس را استخراج کرد.
3.3. ویژگی شدت بازتاب
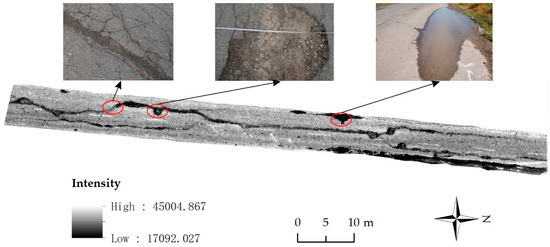
شدت بازتاب رابطه خطی با بازتاب طیفی دارد. ما می توانیم یک تصویر شدت بازتاب با ویژگی شدت بازتاب ابر نقطه بسازیم. بنابراین، انواع مختلف نابسامانی روسازی را می توان بر اساس ویژگی شدت بازتاب آنها استخراج کرد. در این مطالعه، تغییرات ارتفاعی در بخش جاده انتخابی بسیار کم است و یک سطح پیوسته در مقیاس ماکروسکوپی و یک ویژگی صخرهای را در مقیاس میکروسکوپی نشان میدهد. بنابراین، ما روش وزن دهی معکوس فاصله را اتخاذ کردیم، که اغلب استفاده می شود و در درونیابی ابر نقطه ای پایدار است [ 42 ]. تصویر درون یابی شده دارای اندازه پیکسل 5 سانتی متر است، همانطور که در شکل 12 نشان داده شده است .
شکل 12 نشان می دهد که مشکلات روسازی در جاده انتخابی بسیار جدی است. در طول جاده چاله های مدور زیاد و چندین ترک طولی وجود دارد. مناطقی با شدت انعکاس کم در دو طرف جاده وجود دارد که ناشی از کاهش شدت انعکاس در نوار نزدیک به فروسرخ به دلیل جذب آب باران است. به دلیل پر شدن آب باران، شدت انعکاس و ارتفاع تحت تأثیر جذب انرژی لیزر و انکسار آب قرار می گیرد که باعث ایجاد برخی خطاها در استخراج پریشانی می شود.
3.4. ویژگی های هندسی شی گرا
تصویر شدت انعکاس ویژگی های طیفی در باند مادون قرمز میانی را منعکس می کند. علاوه بر تفاوت آشکار با روسازی بدون آسیب در طیف، نابسامانیهای روسازی دارای ویژگیهای هندسی منحصر به فردی هستند که میتوان آن را برای جبران کمبود اطلاعات طیفی محاسبه کرد. در اینجا، تقسیم بندی شی گرا از تصویر شدت انعکاس برای استخراج ویژگی های هندسی پریشانی روسازی انجام شد. ما الگوریتم تقسیمبندی شدتی را که توسط ENVI/IDL ارائه شده بود، اتخاذ کردیم که بر اساس روشنایی پیکسل است و برای تقسیمبندی تصاویر با گرادیانهای ظریف بهترین است. با تنظیم آستانه مقیاس تقسیم بندی و ادغام، زمانی که پارامترهای مقیاس تقسیم بندی و مقیاس ادغام به ترتیب روی 10 و 15 تنظیم شده بودند، نتیجه تقسیم بندی خوبی به دست آمد.شکل 13 . نتیجه تقسیمبندی نشان میدهد که نواحی با پریشانی شدید اساساً به یک منطقه کامل تقسیم میشوند، در حالی که مناطق با شرایط روسازی بهتر به دلیل پیر شدن روسازی آسیبدیده به تعداد زیادی تکههای کوچک تقسیم میشوند.
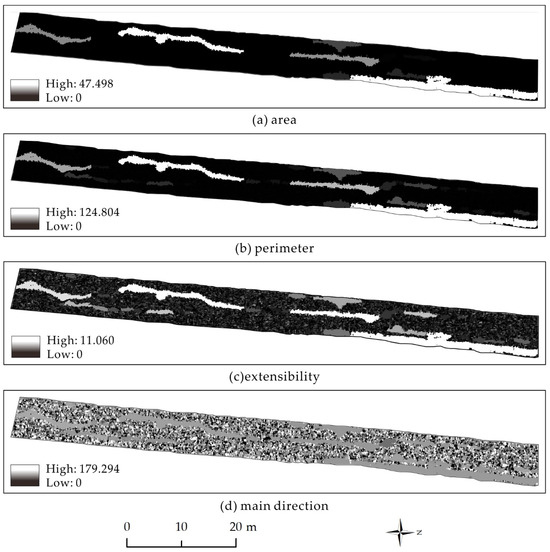
ما ویژگی های هندسی نتایج تقسیم بندی را با استفاده از ماژول استخراج ویژگی ارائه شده توسط ENVI/IDL، از جمله ویژگی های منطقه ای و ویژگی های شکل، استخراج کردیم. ویژگی های منطقه ای شامل مساحت، محیط، گسترش پذیری و جهت اصلی بود که برای توصیف ویژگی های منطقه ای استفاده شد. این ویژگی ها تحت تأثیر پارامترهای تقسیم بندی قرار گرفتند، اما ویژگی های انواع مختلف اشیاء را می توان در یک نتیجه تقسیم بندی رضایت بخش بیان کرد. ویژگی های شکل شامل ضریب شکل، فشردگی، دایره ای و مستطیلی بود. این ویژگی ها در درجه اول برای ارزیابی مورفولوژی هندسی خاص مرز یک شی مورد استفاده قرار گرفتند. برخی از انواع پریشانی اغلب تغییرات قابل توجهی در ویژگی های منطقه ای دارند اما توزیع نسبتاً پایداری در خطوط دارند.
شکل 14 توزیع چهار ویژگی منطقه ای را نشان می دهد. با توجه به نتیجه تقسیم بندی، تکه های چند ضلعی در مناطق آسیب دیده نسبتا بزرگ هستند. به همین ترتیب، مساحت و ویژگی های محیطی نیز بزرگ هستند. بیشتر مشکل روسازی در امتداد جهت شمال به جنوب توزیع شده است. بنابراین، کشش پذیری آنها به طور کلی بیشتر از روسازی های سالم است. جهت اصلی منعکس کننده جهت اصلی اجسام تغییر شکل یافته است. در روسازی آسیبدیده، جهت اصلی بهدلیل نتیجه قطعهبندی قطعهبندی شده بهطور تصادفی توزیع میشود، در حالی که جهت اصلی در مناطق آسیبدیده ثابت است.
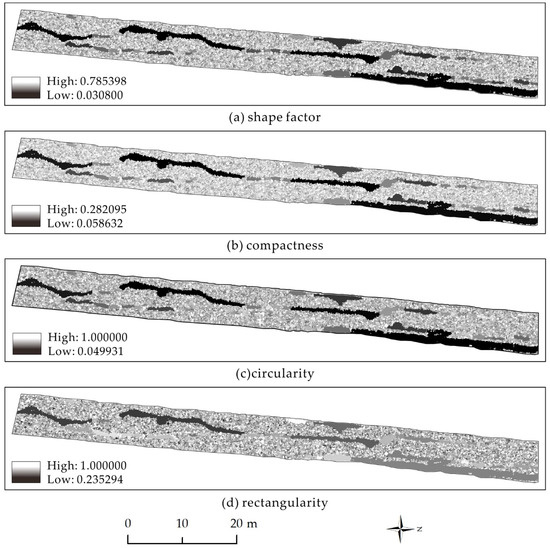
فاکتورهای شکل، کمیتهای بیبعدی هستند که در تجزیه و تحلیل تصویر استفاده میشوند و شکل یک چندضلعی را مستقل از اندازه آن به صورت عددی توصیف میکنند. کمیت های بدون بعد برای نشان دادن درجه انحراف از یک دایره استفاده می شوند. فشردگی برای اندازه گیری درجه سفتی برای یک مرز چند ضلعی اتخاذ می شود و دایره بهترین شکل فشرده است. دایرهای برای اندازهگیری ویژگی دایرهای یک چند ضلعی استفاده میشود، که در آن مقدار یک دایره استاندارد 1 است. به همین ترتیب، مستطیل بودن معیاری از ویژگی مستطیلی است، که در آن مقدار یک مستطیل 1 است. این چهار ویژگی برای اندازهگیری محاسبه میشوند. شکل چند ضلعی ها ( شکل 15). برخی از پریشانیهای معمولی مانند چالهها، فرونشست، و آشفتگی، اشکال هندسی بسیار قابل تشخیصی دارند. محاسبات این ویژگی های شکلی نقش مهمی در استخراج نابسامانی روسازی و انواع مختلف تمایزات دیسترس ایفا می کند.
4. طبقه بندی پریشانی روسازی آسفالت با استفاده از جنگل تصادفی
4.1. اصول طبقه بندی تصادفی جنگل
در این مطالعه، ما در مجموع 48 ویژگی برای طبقهبندی پریشانی روسازی، از جمله ویژگی ارتفاع، ویژگیهای آماری چند مقیاسی، ویژگی شدت انعکاس و ویژگیهای هندسی شیگرا استخراج کردیم. از آنجایی که این ویژگی ها دارای درجه خاصی از همبستگی هستند، روش های طبقه بندی سنتی که مبتنی بر احتمال و آمار هستند در چنین شرایطی با مشکل مواجه می شوند. بنابراین از RFC که توانایی قوی در کاهش همبستگی بین درختان و خطای تعمیم [ 43 ] دارد، استفاده شد. RFC دارای دقت طبقه بندی و استحکام بالایی است و کاربرد بسیار خوبی برای طبقه بندی داده های چند نمونه ای و با ابعاد بالا دارد [ 44 ].
RFC یک طبقه بندی مجموعه ای است که به رویکرد جدیدی اشاره دارد که نه تنها از یک درخت تصمیم، بلکه از درخت های تصمیم گیری زیادی استفاده می کند. هر درخت تصمیم با توجه به مجموعه آموزشی و یک بردار تصادفی تولید می شود. θک، که در آن بردارهای تصادفی که برای تولید هر درخت تصمیم استفاده می شوند به طور مستقل به طور یکسان توزیع می شوند. مجموعه درخت تصمیم نهایی مدل RFC است { ساعت(ایکس،θک), k = 1,2,…, K } که X یک بردار ورودی است [ 45 ]. هر درخت تصمیم ساعت(ایکس،θک)رای به انتخاب نتیجه طبقه بندی بردار ورودی X دارد . پس از آموزش دور K، یک دنباله مدل طبقه بندی { ساعت1(ایکس)، ساعت2(ایکس),…, ساعتک(ایکس)} را می توان با توجه به مجموعه آموزشی به دست آورد و مدل RFC توسعه یافته است. نتیجه طبقه بندی مجموعه نمونه با رای ساده به شرح زیر تعیین می شود:
جایی که اچ (ایکس)مدل RFC است، h i (ایکس)یک درخت تصمیم منفرد است، X بردار ورودی است، Y بردار هدف (یا هدف طبقه بندی) است، و I (·)تابع نشانگر است.
4.2. طبقه بندی آسیب روسازی آسفالت
4.2.1. سیستم طبقه بندی
با توجه به معیار طبقه بندی شرح داده شده در مشخصات فنی برای نگهداری روسازی آسفالت بزرگراه [ 38 ] و امکان سنجی طبقه بندی با ابر نقطه به دست آمده با فاصله 5 سانتی متر، سیستم طبقه بندی ایجاد شده در این مطالعه بر استخراج نابسامانی های شدید روسازی متمرکز است ( جدول) . 3). از یک سو، کیفیت داده ها در این تحقیق امکان استخراج نابسامانی های خفیف روسازی را نمی دهد. از سوی دیگر، پریشانی شدید نشان دهنده این واقعیت است که روسازی وارد مرحله آخر پیری شده است. هنگامی که این نوع پریشانی ظاهر می شود، روسازی عملکرد عادی خود را به عنوان سکویی برای حرکت وسایل نقلیه از دست داده و نیاز به تعمیر و نگهداری فوری دارد. بنابراین، ما یک سیستم طبقه بندی را عمدتاً برای مشکلات شدید روسازی ایجاد کردیم. به دلیل شباهت بین فرونشست، شیار و ترک، آنها در طبقه بندی به عنوان یک نوع ناراحتی در نظر گرفته می شوند.
4.2.2. پیاده سازی و نتایج RFC
در بخش 3 ، در مجموع 48 ویژگی استخراج شد، از جمله ارتفاع ابر نقطه، شدت انعکاس، یک شاخص زبری چند مقیاسی، یک انحنای گاوسی چند مقیاسی، و چندین ویژگی هندسی شی گرا. ویژگی های چندگانه مجموعه داده در جدول 4 فهرست شده است .
با توجه به سیستم طبقه بندی ارائه شده در 4.2.1، RFC برای طبقه بندی مجموعه داده های چند مقیاسی و چند بعدی به دست آمده به کار گرفته شد. نمونه های آموزشی در جدول 5 گزارش شده است .
در طول فرآیند طبقهبندی، از روش اعتبارسنجی متقاطع برای طبقهبندی نمونههای آموزشی استفاده کردیم ( شکل 16).). نمونههای آموزشی بهطور تصادفی با نسبت 4:1 نمونهگیری شدند که در آن 80 درصد دادههای آموزشی برای آموزش مدل طبقهبندی و 20 درصد بقیه به عنوان مجموعه اعتبارسنجی برای اعتبارسنجی دقت استفاده شد. روش اعتبار سنجی متقابل نه تنها می تواند صحت طبقه بندی را تأیید کند، بلکه پایداری روش طبقه بندی را نیز نشان می دهد. در کل پنج آزمایش در فرآیند طبقه بندی انجام شد. مدل RFC که در طول آزمایشات مورد استفاده قرار گرفت شامل 200 درخت تصمیم بود و هر یک از این درختان دارای 9 ویژگی و حداکثر ارتفاع درخت 10 بود. این مزیت است زیرا هر درخت تصمیم میتواند تصمیمات طبقهبندی دقیقتری را تنها بر اساس ویژگیهای مؤثر اتخاذ کند. کاهش خطای مرتبط با ریسک ساختاری شامل کل بردار ویژگی در تحلیل. به بیان ساده، هر درخت تصمیم یک طبقه بندی «متخصص» از دامنه ویژگی است که در آن استفاده می شود. برای مشخصه ای که برای متمایز کردن نوع کلاس استفاده می شود، یک درخت تصمیم غیرتخصصی یک روش تقریبا تصادفی رای گیری را اتخاذ می کند، که در آن تعداد درخت های تصمیم تخصصی برای طبقه بندی دقیق زمانی که همه درخت های تصمیم با تعداد معینی ملاقات می کنند کافی است. دقت آموزش و دقت تست در نشان داده شده است که در آن تعداد درختهای تصمیم تخصصی برای طبقهبندی دقیق زمانی که همه درختهای تصمیم با تعداد معینی ملاقات میکنند کافی است. دقت آموزش و دقت تست در نشان داده شده است که در آن تعداد درختهای تصمیم تخصصی برای طبقهبندی دقیق زمانی که همه درختهای تصمیم با تعداد معینی ملاقات میکنند کافی است. دقت آموزش و دقت تست در نشان داده شده استجدول 6 .
نتایج تجربی نشان میدهد که روش از دقت طبقهبندی بالایی برخوردار است و دقت آن پایدار است. نتایج فوق نه تنها اعتبار مدل استخراج نابسامانی روسازی را منعکس میکند، بلکه کاربرد و استحکام روش RFC را نیز نشان میدهد. علاوه بر این، این روش از دقت آموزشی بالایی برخوردار است، در حالی که دقت تست کاهش قابل توجهی را نشان نمی دهد، که نشان دهنده استحکام قوی در برابر بیش از حد است.
4.2.3. ارزیابی دقت
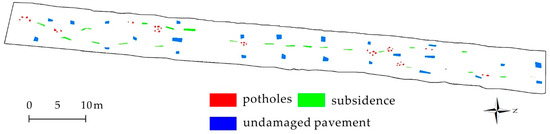
برای تأیید بیشتر دقت طبقهبندی، ما نتایج طبقهبندی را با نتایج تفسیر بصری به عنوان مرجع تجزیه و تحلیل کردیم ( جدول 7 ).
با توجه به جدول 7 ، دقت کلی 92.3٪ است. دقت طبقهبندی نسبت به اعتبارسنجی متقاطع کاهش یافت، اما بیشتر از 90٪ باقی ماند. خطای اصلی طبقهبندی آشفتگی چالهها از خطای حذف ناشی میشود، یعنی برخی از چالهها به اشتباه به عنوان فرونشست طبقهبندی شدند. هنگام مقایسه نتایج طبقه بندی با نتایج تفسیر بصری، آشکار است که برخی از چاله ها به اشتباه به عنوان نشست طبقه بندی شده اند. مناطق طبقه بندی اشتباه عمدتاً در لبه چاله ها قرار داشتند که یک منطقه انتقالی از روسازی آسیب دیده و روسازی بدون آسیب است ( شکل 17).ج). در این مناطق، شاخص زبری و انحنای گاوسی تحت تأثیر روسازی بدون آسیب اطراف قرار گرفت و مقادیر ویژه آشکار نبودند که منجر به درجه خاصی از طبقهبندی اشتباه شد. علاوه بر خطاهای طبقه بندی در منطقه انتقالی، دقت طبقه بندی در سایر مناطق بسیار بالا بود و توزیع پریشانی را می توان به طور دقیق استخراج کرد، که مرجعی برای آژانس های تعمیر و نگهداری بزرگراه برای ارزیابی شرایط جاده و انجام تعمیرات بیشتر فراهم می کند.
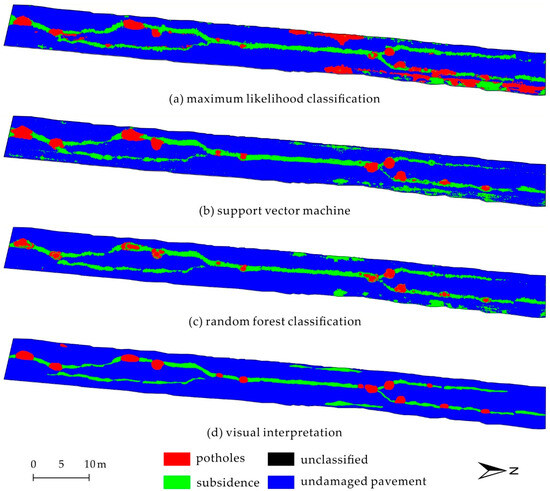
4.3. مقایسه روش های مختلف طبقه بندی
در این بخش، نتایج طبقهبندی RFC را با طبقهبندی حداکثر احتمال (MLC) و ماشین بردار پشتیبان (SVM) مقایسه میکنیم تا نشان دهیم که انتخاب ما از RFC به عنوان روش طبقهبندی منطقی است. ما از همان مجموعه دادههای چندویژگی و نمونههای آموزشی در MLC استفاده کردیم و آموزش مدل با استفاده از روش اعتبارسنجی متقاطع در مجموع پنج بار انجام شد. میانگین دقت تمرین و دقت تست به ترتیب 31/95 درصد و 13/86 درصد بود. ما مدل طبقهبندی را با بالاترین دقت برای استخراج آسیبهای روسازی انتخاب کردیم. نتیجه طبقه بندی در شکل 17 نشان داده شده استآ. نتیجه نشان می دهد که خطای کارکرد چاله ها بسیار جدی بوده و تعداد زیادی از فرونشست ها به اشتباه به عنوان چاله طبقه بندی شده اند. این به این دلیل است که روش MLC به طور موثر از ویژگیهای ارتفاعی چند مقیاسی و ویژگیهای آماری همسایگی استفاده نمیکند. از همان مجموعه داده ها و نمونه های آموزشی در SVM استفاده شد. ما یک تابع پایه شعاعی را به عنوان تابع هسته انتخاب کردیم و ضریب جریمه 100 بود. مدل پنج بار آموزش داده شد و میانگین دقت تمرین و دقت تست به ترتیب 98.95% و 94.83% بود. مدل طبقه بندی با بالاترین دقت برای استخراج نابسامانی روسازی انتخاب شد و نتیجه در شکل 17 ب نشان داده شده است. همانطور که در شکل 17b نشان می دهد، اثر بصری نتیجه طبقه بندی به دست آمده توسط SVM در مقایسه با MLC بسیار بهبود یافته است. SVM در پرداختن به داده های با ابعاد بالا نسبت به روش MLC برتری داشت و دقت تست از 86.13% به 94.83% بهبود یافت. با این حال، مشخص شد که دو نوع آسیب روسازی در طبقهبندی SVM نسبتاً بزرگ هستند و روسازی آسیبدیده در محدوده معینی از آشفتگی نیز به اشتباه به عنوان چالهها یا فرونشست طبقهبندی شده است. به دلیل همبستگی بین شاخص زبری چند مقیاسی و انحنای گاوسی، هنگامی که یک ابرصفحه در فضای چندبعدی ایجاد شد، ویژگیهای چند بعدی یکدیگر را محدود میکردند که بیان ویژگیهای شیگرا را محدود میکرد و منجر به خطاهای کمیسیون در لبه روسازی میشد. پریشانی
نتایج طبقه بندی که با MLC و SVM به دست آمد با نتایج RFC مقایسه شد ( شکل 17 ). به طور همزمان، از نتایج تفسیر بصری مصنوعی برای تأیید نتایج طبقهبندی استفاده شد. مقایسه روش های مختلف در جدول 8 نشان داده شده است .
نتایج مقایسه ای نشان می دهد که طبقه بندی RFC با بالاترین دقت طبقه بندی برجسته است ( جدول 8، نشان دهنده اثربخشی آن در مدیریت طبقه بندی داده های با ابعاد بالا است. تفاوت بین دقت شبیهسازی و صحت اعتبارسنجی واقعی طبقهبندی RF تقریباً 5٪ کمتر از MLC و SVM است. این بدان معنی است که طبقه بندی RF دارای ظرفیت تعمیم قوی تری در فرآیند آموزش است، در حالی که دو دسته دیگر تمایل دارند مدل خود را با داده های آموزشی تطبیق دهند. این بیشتر ثابت کرده است که استراتژی تصمیم گیری RFC بر اساس رای گیری ترکیبی از طبقه بندی کننده های MLC و SVM بهتر عمل می کند. بخشی از درختهای تصمیم در مدل طبقهبندی میتوانند به طور موثر از ویژگیهای شی گرا برای تعیین مرز دقیق پریشانی روسازی استفاده کنند، در حالی که بخش دیگر درختهای تصمیم میتوانند به نوع خاصی از پریشانی با ویژگیهای طیفی و ویژگیهای ارتفاعی چند مقیاسی رأی دهند.
4.4. کاربرد و اعتبارسنجی
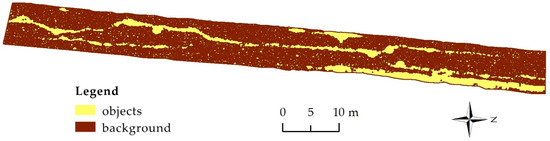
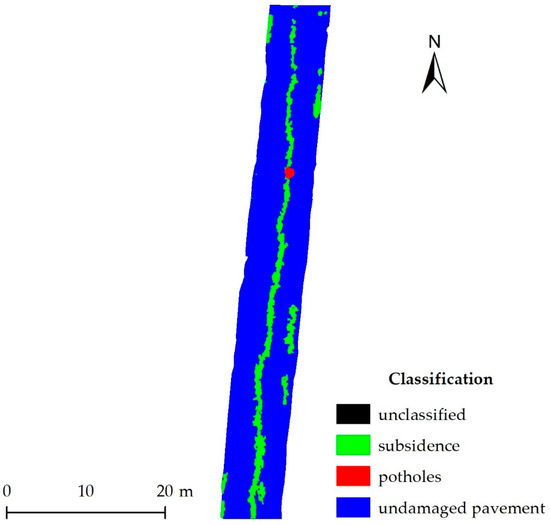
در این بخش، روش پیشنهادی در این مقاله را به داده های اعتبارسنجی برای تأیید پایداری آن اعمال کردیم. اکتساب و پیش پردازش داده های اعتبار سنجی همانند داده های تجربی بود. یک مجموعه داده چندویژگی شامل 48 ویژگی با توجه به ارتفاع و شدت بازتاب ابر نقطه اصلی استخراج شد. روش RFC برای انجام طبقه بندی پریشانی روسازی به کار گرفته شد. نتایج طبقه بندی در شکل 18 نشان داده شده است .
ما از نمونههای آزمایش مستقل برای تأیید صحت نتایج طبقهبندی استفاده کردیم که در جدول 9 نشان داده شده است .
با توجه به نتایج طبقهبندی و جدول اعتبارسنجی دقت، روش طبقهبندی مخرب روسازی زمانی که برای دادههای اعتبارسنجی اعمال شد، دقت بالایی به دست آورد. دقت کلی 95.86% و ضریب کاپا 0.9389 بود. دقت طبقهبندی چالهها نزدیک به 99 درصد بود، در حالی که درجه مشخصی از خطای کمیسیون در استخراج پریشانی فرونشست وجود داشت. همراه با تصویر شدت انعکاس داده های اعتبارسنجی، مناطق آسیب دیده در لبه مناطق فرونشست به اشتباه به عنوان پریشانی فرونشست طبقه بندی شدند. در این مناطق، شاخص زبری و انحنای گاوسی تحت تأثیر روسازی اطراف قرار گرفت و مقادیر ویژه آشکار نبودند که منجر به درجه خاصی از طبقهبندی اشتباه شد. با این حال، دقت کلی نتایج طبقه بندی هنوز بالا بود. بنابراین، با استفاده از طبقهبندی پریشانی و تحلیل نتایج دادههای اعتبارسنجی، مشخص میشود که روش ما پایا و پایدار بوده است.
5. نتیجه گیری ها
این تحقیق کاربرد طبقهبندی تصادفی جنگل را در شناسایی نابسامانی روسازی بر اساس استفاده از دادههای ابر نقطهای UAV LiDAR نشان داده است. برای پرداختن به مشکلات در طبقهبندی پریشانی با استفاده از روش مرسوم، مجموعهای مؤثر از ویژگیها، از جمله ویژگیهای طیفی و فضایی که میتوان از ابر نقطه LiDAR مشتق شد، یافت شد. یک مطالعه موردی برای طبقه بندی پریشانی روسازی در شمال سین کیانگ، چین بر اساس تجزیه و تحلیل ارتفاعات و شدت داده های ابر نقطه ای انجام شد. مدل طبقهبندی تصادفی جنگل با موفقیت با 48 ویژگی (به عنوان مثال، ارتفاع، شدت، زبری، انحنا، هندسی) توسعه یافت و یک طبقهبندی رضایتبخش با دقت 92.3 درصد به دست آمد. مشخص شد که دقت کلی RFC 5-10٪ بیشتر از طبقه بندی کننده های MLC و SVM است. ادغام ویژگیهای طیفی، ارتفاعی و هندسی استخراجشده از ابر نقطهای UAV LiDAR در طبقهبندی تصادفی جنگل میتواند ترسیم بهتری از چالهها و فرونشست از روسازی آسیبدیده ایجاد کند. در نتیجه، پلت فرم انعطاف پذیر پهپاد، که با یک اسکنر لیزری پیکربندی شده است، ابزار ارزشمندی برای نظارت بر وضعیت روسازی آسفالت فراهم می کند.
در کار آینده، دادههای ابر نقطهای پهپاد LiDAR بیشتری از مناطق و بخشهای مختلف جاده میتواند برای ارزیابی بیشتر عملکرد روش برای شناسایی چالهها و فرونشست استفاده شود. به دلیل محدودیت تفکیک مکانی، ابر نقطه ای پهپاد LiDAR که در این مقاله استفاده شده است، هنوز نمی تواند پریشانی جزئی را تشخیص دهد. بنابراین، برای افزایش بیشتر دقت ارزیابی وضعیت روسازی، ابر نقطه با وضوح بالاتر باید به دست آید. علاوه بر این، سایر داده های سنجش از راه دور، از جمله تصاویر چند طیفی توسط پهپاد، نیز پتانسیل بالایی برای نظارت بر وضعیت روسازی دارند. طبقهبندی دقیقتر آشفتگی روسازی ممکن است از طریق تجزیه و تحلیل جامع ابر نقطهای با چگالی بالا و تصاویر سنجش از راه دور چند طیفی به دست آید.





بدون دیدگاه