اگر یک عکس هوایی بگیرید، یک نقطه مرکزی در عکس وجود دارد که مستقیماً به پایین نگاه می کند. در این نقطه مرکزی، شما نمی توانید هیچ یک از اضلاع ساختمان یا ویژگی را ببینید.
اما اگر به جای دیگری از تصویر نگاه کنید، خواهید دید که ویژگی هایی مانند ساختمان ها در عکس خم شده اند. این جابجایی شعاعی از نقطه مرکزی به عنوان جابجایی امدادی شناخته می شود .
فتوگرامتری از عکس هایی از حداقل دو نقطه دید متفاوت استفاده می کند. مشابه نحوه عملکرد چشمان شما، به دلیل نقاط مشاهده جداگانه، عمق و پرسپکتیو به دست می آید.
جابجایی امدادی در مقابل اختلاف منظر
جابجایی امدادی : جابجایی امداد زمانی اتفاق میافتد که ساختمانها، کوهها یا بالای تپهها به دلیل برجسته بودن از نمای مرکزی عکس هوایی جابجا شوند. هر چه اشیاء بیشتر از مرکز تصویر دور باشند، جابجایی تسکین بیشتری برای یک ویژگی رخ می دهد.
هدف فتوگرامتری اصلاح جابجایی برجسته در یک تصویر از طریق همپوشانی تصاویر استریو است. به همین دلیل است که هواپیماها بر روی همان منطقه حرکت زیگزاکی دارند، شبیه به نحوه بریدن چمن زن . زوایای متعدد دوربین همپوشانی و اختلاف منظر لازم را ایجاد می کند.
PARALLAX: اختلاف منظر استریوگرافی تغییر ظاهری در موقعیت های نسبی ویژگی ها زمانی است که در مکان های مختلف مشاهده می شود. این با جابجایی برجسته متفاوت است زیرا مشاهدات نقطه ای را از یک جسم در عکس های جداگانه می گیرد.
شما فقط زمانی منظر استریوگرافی را دریافت می کنید که دو یا چند نقطه دید از یک شی را بدست آورید. سپس، اگر ویژگی را از نقاط مختلف مشاهده کنید، می توانید جابجایی امداد را اندازه گیری کنید.
مراحل ایجاد یک مدل فتوگرامتری
ایجاد یک مدل فتوگرامتری به موارد زیر نیاز دارد:
نقاط گره زدن: مختصات پیوند نقاط را از دو یا چند تصویر با هم تداخل دارند. به طور کلی، شما برای ویژگی هایی که از نظر بصری در دو یا چند عکس آشکار می شوند، نقاط اتصال تعیین می کنید. وقتی همپوشانی دارید، نقاط گره خورده عکسها را از طریق مختصات ویژگیهای مشترک تنظیم میکنند.
نقاط کنترل زمینی (GCP): ایجاد کنترل زمینی جهت گیری و موقعیت تصاویر را به مختصات جغرافیایی شناخته شده در سطح زمین. با افزودن نقاط کنترل زمین، به محصولات فتوگرامتری یک مرجع فضایی به دنیای واقعی می دهید.
تنظیم بسته: اجرای یک تنظیم دسته بلوک، اعوجاج هندسی را از مجموعه ای از تصاویر از نقاط سه بعدی در دیدگاه های مختلف حذف می کند. این فرآیند خطای بین نقاط تصویر مشاهده شده و پیش بینی شده را در طول بازپرداخت به حداقل می رساند.
نقاط گره زدن تصاویر شما را به هم پیوند می دهد. نقاط کنترل زمینی به دنیای واقعی اشاره می کنند. و تنظیمات بسته همه اینها را در کنار هم قرار داده و خطا را به حداقل می رساند.
محصولات برگرفته از فتوگرامتری
پس از اجرای یک تنظیم بسته نرم افزاری، می توانید چندین محصول فتوگرامتری ایجاد کنید:
ارتوموزائیک: ارتوموزائیک اعوجاج هندسی را که در تصاویر ذاتی است، تصحیح می کند. با استفاده از نقاط اتصال و GCP های اختصاص داده شده، می تواند تصاویر را به دنیای واقعی ارجاع دهد. محصول نهایی یک موزاییک بدون درز است که از طریق تطبیق لبه ها و تعادل رنگ دوخته شده است.
مدل سطح دیجیتال : یک مدل سطح دیجیتال (DSM) ویژگی های طبیعی و ساخته شده روی سطح زمین را با درج ارتفاع آنها به تصویر می کشد. به عنوان مثال، ارتفاع می تواند از بالای ساختمان ها، تاج درختان و خطوط برق باشد.
مدل زمین دیجیتال : یک مدل زمین دیجیتال (DTM) به سادگی یک سطح ارتفاعی است که زمین برهنه را نشان می دهد. وقتی تمام ویژگی های روی زمین را از بین می برید، این همان چیزی است که یک DTM نشان دهنده آن است. بسته به جایی که در آن زندگی می کنید، یک DTM مترادف با مدل دیجیتال ارتفاع (DEM) است. به عنوان مثال، ASTER GDEM از جفت های استریو از دو تصویر در زوایای مختلف استفاده می کند و نمونه ای از یک DEM فتوگرامتری است.
کانتورها: خطوط خطوطی با ارتفاع مساوی هستند و محصول جانبی یک مدل زمین دیجیتال هستند. آنها برای نشان دادن شیب شیب، صخره ها، پشته ها و دره ها مفید هستند.
نرم افزار فتوگرامتری
PIX4D: Pix4D یک انتخاب بسیار محبوب برای نرم افزار فتوگرامتری است زیرا استفاده از آن آسان است و پایگاه کاربری زیادی دارد. برای هر نوع پهپاد، ماهواره، اسکن یا تصاویر هواپیمای همپوشانی، Pix4D پایه ای محکم در ابزارهای فتوگرامتری به شما می دهد.
ESRI ORTHOMAPPING: نقشه برداری ارتو Esri از زمانی که برای اولین بار معرفی شد راه طولانی را پیموده است. مجموعه ای از ابزارها را در ArcGIS Pro ارائه می کند تا نقاط اتصال، GCP و نقاط بازرسی را به یک فضای کاری نقشه برداری ارتو اضافه کند. این به شما امکان می دهد هر یک از محصولات نقشه برداری ارتو خود را تنظیم، موزاییک، تطبیق لبه و تعادل رنگ کنید.
E-FOTO: عملکرد اصلی E-foto مثلثسازی عکس، مدلسازی استریوسکوپی و تصحیح زمین است. این نرم افزار مجموعه ای کاملا کاربردی از ابزارهای فتوگرامتری را برای استفاده بدون هزینه ارائه می دهد. E-foto آموزشها و مثالهای زیادی دارد تا شما را به خوبی به سمت متخصص فتوگرامتری هدایت کند.
ژانویه گذشته، در یک معدن خاک رس در نزدیکی گلدن، کلرادو، آلنا اسکندرووا به کشف شگفت انگیزی دست یافت: ردپای یکی از خویشاوندان باستانی تمساح – که زمانی برای حدود 100 میلیون سال حفظ می شد – تا حد زیادی توسط فرسایش پاک شده بود.
در 11 سال از زمانی که دیرینه شناس، مارتین لاکلی، دانشیار موزه تاریخ طبیعی دانشگاه کلرادو و استاد بازنشسته دانشگاه، برای اولین بار این مکان ردیابی را مستند کرد، ردپای فسیل شده ای که از جانور به جا مانده بود، عمق خود را از دست داده بود – تقریباً از 7 سال. اسکندرووا گفت که از 12 میلی متر به 3 تا 4 میلی متر می رسد.
اسکندرووا گفت که تأثیرات عناصر می تواند به طور مشهودی مسیرها را در مدت زمان کوتاهی کاهش دهد، نه تنها به شکنندگی آنها در برابر تغییرات آب و هوایی و سایر تهدیدات انسانی اشاره دارد، بلکه به اهمیت فتوگرامتری به عنوان وسیله ای برای حفظ رکوردهای زمین شناسی اشاره دارد.
فتوگرامتری چیست؟
فتوگرامتری علم بازسازی اشیاء و محیط های موجود در دنیای فیزیکی از طریق عکس است. این تکنیک شامل دوختن مجموعههای بزرگی از عکسهای همپوشانی برای ایجاد نقشههای توپوگرافی، مشها و مدلهای دیجیتالی دوبعدی و سه بعدی واقعی است. ابزارهای نرم افزاری به ایجاد این دارایی های دیجیتال با استفاده از داده های پیکسلی از عکس های هوایی گرفته شده توسط هواپیماهای بدون سرنشین یا عکس های دور نزدیک با دوربین های دستی کمک می کنند. از بررسی سایت های ساخت و ساز و مناطق سیل گرفته تا کاوش مکان های فسیلی و ارزیابی سلامت محصول، این تکنیک کاربردهای مختلفی دارد.
“گاهی اوقات ردیابی تنها حضور حیوانات در هر محیط دیرینه است. بنابراین [فوتوگرامتری] برای ما بسیار مهم است که بدانیم چه نوع حیواناتی در آنجا بودند.” آهنگها نیز رفتار آنها را به ما نشان میدهند. گاهی اوقات میتوان گفت، برای مثال، گروهی از دایناسورها در حال مهاجرت از نقطهای به نقطه دیگر بودند.»
اسکندرووا یک فتوگرامتری از فاصله نزدیک با تخصص در دیرینه شناسی است. او از دوربین Canon 5D Mark II با لنز 24 میلیمتری برای انجام بسیاری از کارهای خود استفاده میکند، که شامل مستنداتی از ردپای دایناسور ornithischian («پرنده پرنده»)، لانههای کوچک بی مهرگان و اولین رد مزوزوئیک گزارش شده از یک حواصیل کوچک است. پرنده ای شبیه به نام Ignotornis Mcconnelli . بیشتر کارهای او در سازند ساوث پلات – یک بستر سنگی غنی از ماسه سنگ در دامنههای محدوده فرانت کلرادو انجام میشود.
“گاهی اوقات ردیابی تنها حضور حیوانات در هر محیط دیرینه است. بنابراین [فتوگرامتری] برای ما بسیار مهم است که بدانیم چه نوع حیواناتی در آنجا بودند.”
پس از گرفتن صدها عکس روی هم، اسکندرووا از Agisoft Metashape Pro 1.7 استفاده می کند تا آنها را با هم در یک تصویر سه بعدی وصله کند. با تراز کردن پیکسلها در عکسها، این نرمافزار چیزی به نام ابر نقطه را ارائه میکند – صورت فلکی سهبعدی از نقاط رنگی که خطوط یک سطح را نشان میدهد. سپس این نقاط با شبکهای بافتدار لایهبندی میشوند تا تجسمهای واقعی ایجاد کنند، از جمله نقشههای عمقی که خطوط جغرافیایی یک سطح را نشان میدهند.
اسکندرووا نوشت: «به همین دلیل است که فتوگرامتری باید به عنوان بهترین روش برای مطالعات فسیلها و آهنگها در نظر گرفته شود. «مقالات [بسیاری از علمی] اندازهگیریها را به عنوان اعداد ارائه میکنند، اما نحوه اندازهگیریها را در ارتباط با نقطه شروع و پایان ثبت نمیکنند. هر دانشمند یا یک دستیار کار میدانی، اندازه گیری ها را متفاوت انجام می دهد. با فتوگرامتری، میتوانید نه تنها طول، عرض و عمق [تراکها] بلکه نقاط شروع و پایان را نیز ثبت کنید.
رندر فتوگرامتری یکی از کاملترین و به خوبی حفظ شدهترین محوطههای کروکودیل کرتاسه با استفاده از Agisoft Metashape Pro 1.7. | عکس: آلنا اسکندرووا
کنترل زمینی به ربات اصلی
فتوگرامتری چیز جدیدی نیست. روش قرنها بازسازی اندازهگیری ریشه در اصول پرسپکتیو و هندسه تصویری دارد که توسط هنرمندانی مانند لئوناردو داوینچی انجام میشد و توسط ریاضیدانان آلمانی رودولف استورم و گیدو هاوک در اواخر قرن نوزدهم به صورت علمی رسمیت یافت. با این حال، این رشته از طریق نوآوری در نرم افزار و عکاسی هوایی به سرعت در حال پیشرفت است.
امروزه فتوگرامتری در کاربردهای تجاری متنوعی مانند ایمنی عمومی، ساخت و ساز، مهندسی عمران، خودروسازی، کشاورزی و شناسایی نظامی استفاده می شود. و تعداد فزاینده موارد استفاده برای شرکتهای نرمافزاری که ابزارهای مدلسازی سه بعدی و پس از تولید را ارائه میکنند، یک موهبت بوده است.
تحلیلهای انجام شده توسط Data Bridge Market Research پیشبینی میکنند که بازار نرمافزار فتوگرامتری شاهد نرخ رشد مرکب سالانه بیش از 13 درصد بین سالهای 2021 تا 2028 خواهد بود و انتظار میرود ارزش بازار نرمافزار فتوگرامتری تا سال 2028 به 2.56 میلیارد دلار برسد.
تریستان رندال، یکی از مدیران پروژه استراتژیک در شرکت نرمافزار معماری اتودسک، گفت: «من فکر میکنم انقلاب بزرگ با هواپیماهای بدون سرنشین بوده است. به عنوان مثال، در زمینه یک پروژه ساختوساز، جایی که میخواهید شرایط سایت خود را زیر نظر داشته باشید، میتوانید پهپادهایی را خریداری کنید که چند هزار دلار قیمت دارند. بنابراین گرفتن داده های فتوگرامتری بسیار بسیار ساده تر شده است.
راندال به من گفت که فتوگرامتری به دوربین های بسیار پیچیده نیاز ندارد. میتوان آن را با استفاده از دوربینهای دیجیتال تک لنز بازتابی (DSLR)، حلقههای ویدئویی، عکسهای ماهوارهای یا حتی تصاویر گرفتهشده با آیفون انجام داد – تقریباً هر دوربین دیجیتالی که میتواند چندین تصویر را ذخیره کند.
“من فکر می کنم انقلاب بزرگ با هواپیماهای بدون سرنشین بوده است … گرفتن داده های فتوگرامتری بسیار بسیار آسان تر شده است.”
اما ارزان بودن در دسترس بودن پهپادها، کاربرد وسیع زمینی را برای طیف وسیعی از امکانات جدید هوابرد باز کرده است – از ایجاد نقشههای در مقیاس بزرگ برای ارزیابی سلامت محصول یا برنامهریزی برای عملیات امداد اضطراری تا تولید مدلهای سه بعدی واقعی از ساختمانها، جادهها و سیل. مناطق
کریستوفر کابات، مالک و موسس شرکت مشاوره پهپاد ProAerial Media، گفت که یک متخصص فوتوگرامتر می تواند یک پهپاد قابل تعمیر را به قیمت 800 دلار خریداری کند. پس از برنامه ریزی، پهپاد می تواند صدها عکس از یک محیط واقعی در مقیاس بزرگ، مانند یک بخش فرعی یا منطقه شهری، در چند ساعت ثبت کند.
قبل از پرواز، خلبان مسیر پرواز و تعداد عکسهایی را که دوربین میگیرد، بر اساس وضوح خروجی مورد نظرشان انتخاب میکند. این پهپاد که معمولاً با دوربینی با قطر 1 تا 2 اینچ بر روی یک گیمبال چرخان تجهیز شده است، از روی مناظر جلو و عقب می رود و عکس می گیرد – صدها مورد از آنها – برای پردازش بعدی.
کابات گفت: “به معنای واقعی کلمه گرفتن هر تصویر و گرفتن تمام پیکسل ها در هر تصویر و جستجوی تصویر دیگری با حداقل سه پیکسل منطبق است.” “و این کار را برای هر عکسی که دارید انجام می دهد.”
بسته به اهداف یک پروژه، تیمها میتوانند از فتوگرامتری مبتنی بر پهپاد برای ایجاد نقشههای ارتوموزائیک فوتورئالیستی اصلاحشده برای انحنای زمین، گرفتن دادههای حجمی با ارزش – مانند مقدار خاکی که یک تیم ساختمانی برای حفر یک پی نیاز دارد – استفاده کنند. مدل های داخلی را برای گشت و گذار در خانه مجازی در سایت های املاک و مستغلات مانند Zillow ایجاد کنید. با این حال، فتوگرامتری هوایی برای پروژههای در مقیاس بزرگ بهترین کارایی را دارد، نه جزئیات معماری ظریف، که اغلب با اسکن لیزری نشان داده میشوند.
راندال به من گفت که پروژه Google Earth برای نقشهبرداری سه بعدی شهرها در واقع از هر دو فناوری استفاده میکرد، که مناطق بزرگ را با فتوگرامتری ثبت کرد و ویژگیهای ساختمان امضا را با دادههای اسکن دستی به کار برد.
راندال گفت: «نکته کلیدی که باید به خاطر بسپارید این است که [یک ابر نقطه] نمایش بسیار بسیار دقیقی از ویژگی های فیزیکی یک سایت است. “ما آن را “درو کردن چمن” می نامیم، زیرا شما اساساً دوربین را در خطوطی که همپوشانی دارند حرکت می دهید. و سپس از آن عکسها، مثلاً، در موتوری مانند Autodesk ReCap استفاده میکنید تا آنها را به هم بچسبانید.”
ببینید چه کسی استخدام می کند
همه مشاغل برنامهنویس + مهندس در شرکتهای فناوری برتر و استارتآپها را ببینید
مشاهده مشاغل
مش بافتی سه بعدی از یک پارک اداری چهار هکتاری که در Pix4Dmapper از تقریباً 275 عکس پهپاد ارائه شده است. | عکس: ProAerial Media
فتوگرامتری ده ها مورد استفاده دارد. اما ساخت و ساز جایی است که بیشتر هیجان در آن نهفته است.
طی دهه گذشته، فتوگرامتری هوایی صنعت ساخت و ساز را به شدت متحول کرده است. توسعهدهندگان میتوانند به جای استخدام یک تیم نظرسنجی برای عکاسی از یک سایت با سهپایههای همگامسازی شده با GPS، یک پهپاد – مانند Phantom 4 RTK DJI یا Evo 2 RTK Autel – را به هوا بفرستند تا شرایط سایت را در چند ساعت، اغلب با سرعت بسیار پایینتر، به هوا بفرستند. رایان سوینی، مدیر فروش در دفتر شرکت فتوگرامتری Pix4D در دنور، گفت: هزینه .
پهپادها در گرفتن عکسهای با وضوح بالا خوب هستند، تا حدی به این دلیل که بسیار پایین پرواز میکنند – حداکثر ۴۰۰ فوت بالاتر از سطح زمین (یا بالاتر، اگر در محدوده یک سازه قرار داشته باشند)، در مقایسه با حداقل ۵۰۰ فوت بالاتر از سطح زمین برای یک انسان. هواپیمای خلبانی، طبق مقررات اداره هوانوردی فدرال. پهپادها همچنین میتوانند یک سایت را از موقعیتهای مختلف به تصویر بکشند و به مکانهایی برسند که در غیر این صورت ممکن است برای انسان خطرناک باشند – مانند سایتهای شیمیایی خطرناک.
سوئینی گفت: در یک سایت ساخت و ساز معمولی، حدود 500 تصویر گرفته شده توسط یک پهپاد در یک پرواز 30 دقیقه ای را می توان در یک کامپیوتر رومیزی شخصی در حدود دو ساعت پردازش کرد. ارتفاع پرواز، کیفیت دوربین و سطح همپوشانی عکس، همگی بر کیفیت ابر نقطه و خروجیهای نهایی تأثیر میگذارند. همپوشانی 75 درصدی افقی و عمودی هدف خوبی برای مجموعه داده با کیفیت است.
«پیادهسازی فتوگرامتری به شما این توانایی را میدهد که تقریباً به مکان نگاه کنید. شما می توانید پیشرفت [یک سایت ساخت و ساز] را به صورت بصری، بسیار ساده، نظارت کنید.»
علاوه بر ترکیب عکسها، ابزارهای مدلسازی نرمافزاری مانند Recap، Pix4D یا پلتفرمهای فتوگرامتری هوایی یکپارچه مانند 3DR و DroneDeploy، پیکسلهای برچسبگذاریشده جغرافیایی را با مختصات دکارتی نمونهبرداری شده محلی یا واردشده از دادههای GPS شبکهای، تراز میکنند. بنابراین، فایلهای تصویری بازسازیشده، یک به یک با مکانهای واقعی خود در ارتباط هستند – چیزی که برخی از آن به عنوان دوقلوهای دیجیتال یاد میکنند. این خروجی ها را می توان به صورت مدل های ساختمانی سه بعدی، نقشه های توپوگرافی، نقشه های عمق، نقشه های خطوط کانتور و ارتوموزائیک دو بعدی نشان داد.
از آنجایی که این رندرها تا چند اینچ دقیق هستند، معماران و مهندسان میتوانند از آنها برای بهروزرسانی مدلهای «بهعنوان ساختهشده» استفاده کنند تا شرایط روی زمین را منعکس کنند.
کابات گفت، اگر یک خدمه ساخت و ساز یک پیاده رو برنامه ریزی شده را چهار اینچ به سمت غرب حرکت دهند تا از سیستم ریشه جلوگیری کنند، تیم طراحی نیازی به به روز رسانی دستی رندرهای خود ندارد. آنها میتوانند دادههای ابر نقطهای بهروز شده را به محیطهای مجازی وارد کنند تا چنین اختلافاتی را در لحظه اصلاح کنند.
در همین حال، مدیران ساختوساز میتوانند از مدلهای سهبعدی برای پیگیری پروژههای توسعه در مقیاس بزرگ، در حالی که از راه دور کار میکنند، استفاده کنند.
کابات گفت: «اجرای فتوگرامتری به شما این امکان را می دهد که تقریباً به مکان نگاه کنید. “شما می توانید پیشرفت [یک سایت ساخت و ساز] را به صورت بصری، بسیار ساده نظارت کنید.”
نقشه مسیر پرواز پهپاد در Pix4Dmapper ایجاد شده است. | اسکرین شات: ProAerial Media
اسکن لیزری در مقابل فتوگرامتری
اسکنرهای لیزری میتوانند مدلها و نقشههای سهبعدی با وضوح بالا، اغلب با وضوح بالاتر از آنچه که با استفاده از فتوگرامتری به دست میآیند، تولید کنند. با این حال، آنها معمولاً گران هستند – گاهی اوقات ده ها هزار دلار، رندال به من گفت – و باید توسط اپراتورهای انسانی به موقعیتی منتقل شوند تا اهداف خود را “دیدن” کنند.
رندال گفت: “می توانید یک سایت ساخت و ساز را در 20 مایلی شهر تصور کنید.” یک خلبان باید تمام مسیر را از فرودگاه طی کند و سپس برگردد. حتی در داخل یک ساختمان، شما باید ابزار اسکن را در سراسر سایت حرکت دهید تا دیدگاه های مختلف را به تصویر بکشید.
اما فوتوگرامتری هواپیماهای بدون سرنشین محدودیت هایی نیز دارد. کابات گفت که اکثر فرودگاه های ایالات متحده توسط شبکه های LANC (مجوز ارتفاع کم و قابلیت اطلاع رسانی) احاطه شده اند که نیاز به مجوز رسمی فضای هوایی FAA دارند. یک پرواز را می توان در یک ارتفاع معین نمونه برداری کرد – مثلاً 137 فوت – اما در یک منطقه محدود قرار می گیرد که سقف پرواز را به 100 فوت محدود می کند. اگر از قبل هماهنگ نشده باشد، می تواند یک آچار در پروژه نقشه برداری پرتاب کند.
رندال گفت، و موجی از حوادث جنایی اخیر – پرتاب مواد قاچاق توسط هواپیماهای بدون سرنشین به زندانها و پرواز در محدوده فرودگاهها که منجر به تعطیلی شد – منجر به دستورالعملهای دقیقتر پرواز هواپیماهای بدون سرنشین شده است.
دستورالعمل قسمت 107 FAA در حال حاضر همه اپراتورهای هواپیماهای بدون سرنشین تجاری کوچک را ملزم به گذراندن آزمون دانش و ثبت نام میکند، اما قانون جدیدی که در آوریل اجرایی شد، بیشتر پهپادهایی را که در حریم هوایی ایالات متحده پرواز میکنند ملزم میکند به شناسه از راه دور مجهز شوند. طبق وبسایت این آژانس ، این «به FAA، مجری قانون و سایر آژانسهای فدرال کمک میکند زمانی که به نظر میرسد یک پهپاد به شکلی ناامن در حال پرواز است یا جایی که اجازه پرواز ندارد، ایستگاه کنترل را پیدا کنند».
اگر در کارولینای شمالی، ایلینوی، ویسکانسین پرواز میکردید – هر جایی که پوشش گیاهی متراکمتری وجود داشته باشد، فتوگرامتری هرگز نمیتواند دادههای زمین را تفسیر کند، زیرا نمیتواند از پشت بام تاج درختان نفوذ کند.
رندال به من گفت که احتمالاً به این معنی است که آنها توانایی غیرفعال کردن پهپادهایی را دارند که یک تهدید بالقوه هستند.
پهپادها – به طور خاص، دوربین های آنها – در دیدن شاخ و برگ نیز مشکل دارند. شرکت Kabat در چشم انداز بیابانی جنوب نوادا و مناطق آریزونا و یوتا، جایی که فتوگرامتری به خوبی کار می کند، فعالیت می کند.
او گفت: «اما اگر در کارولینای شمالی، ایلینویز، ویسکانسین پرواز میکردید – هر جایی که پوشش گیاهی متراکمتری وجود داشته باشد، فتوگرامتری هرگز نمیتواند دادههای زمین را تفسیر کند، زیرا نمیتواند از پشت بام تاج درختان نفوذ کند.
لبه های ساختمان نیز می تواند مشکل ساز باشد. بر خلاف اسکنرهای لیزری که فاصله ها را به عنوان تابعی از زمانی که طول می کشد تا پرتوهای نور از هدف منعکس شود و به منبع خود بازگردد، اندازه گیری می کنند، فتوگرامتری از تطبیق پیکسل ها برای فاصله تقریبی استفاده می کند.
بنابراین بسته به آنچه در آن پیکسل ها وجود دارد، ممکن است با چالش هایی روبرو شوید. اگر مستقیماً از بالای ساختمان تیراندازی میکنید، نمیتوانید آن لبه عمودی را با آن دقت نشان دهید.»
ببینید چه کسی استخدام می کند
همه مشاغل برنامهنویس + مهندس در شرکتهای فناوری برتر و استارتآپها را ببینید
اما این فناوری به سرعت پیشرفته تر و سازگارتر می شود. کابات به من گفت که هواپیماهای جدید توسعه یافته که قرار است به زودی وارد بازار شوند، مانند DJI Mavic Pro 3، انتظار می رود محموله های قابل تعویض داشته باشند، به این معنی که به کاربران اجازه می دهند یک دوربین استاندارد را با یک دوربین زوم، دوربین تصویربرداری حرارتی یا LiDAR تعویض کنند. تشخیص نور و محدوده) دوربین.
وعده گزینههای دوربین مدولار برای تمرینکنندگانی مانند Kabat هیجانانگیز است، اما بازار فناوریهای جدیدتر احتمالاً مدتی طول میکشد تا افزایش یابد.
کابات گفت: “بیشتر مردم هنوز حتی نمی دانند فتوگرامتری چیست.” این بزرگترین چالش است: فقط آگاه کردن مردم که می توانید از فتوگرامتری برای حل مسائل استفاده کنید.
اسکندرووا افزود: «این چیز جدیدی نیست. “اما در زمینه های خاصی، مانند، برای مثال، دیرینه شناسی، این یک رشته نسبتا جدید و در حال رشد است. و در حال حاضر، دانشجویان بسیاری را می بینم که در حال مطالعه فتوگرامتری و انجام پروژه هستند. بسیاری از اساتید قدیمی نیز به فتوگرامتری علاقه مند هستند.
اکثر مردم هنوز حتی نمی دانند فتوگرامتری چیست. این بزرگترین چالش است: فقط آگاه کردن مردم که می توانید از فتوگرامتری برای حل مشکلات استفاده کنید.
و همچنان یک زمینه فعال برای علاقمندان است. کابات در طول ساعات کاری خود، تاریخ مناطق دورافتاده جنوب غرب آمریکا را با هواپیماهای بدون سرنشین و دوربین های دستی، ثبت آثار باستانی در شهرهای ارواح و معادن متروکه در نزدیکی لاس وگاس، و سنگ نگاره های بومیان آمریکا که در امتداد مسیر تاریخی ملی قدیمی اسپانیا پیدا می کند، ردیابی می کند. سانتافه، نیومکزیکو، به لس آنجلس.
اخیراً، او با سازمان غیرانتفاعی Friends of Pando در مورد نقشه برداری از پاندو، یک مستعمره کلونال از یک آسپن در جنوب مرکزی یوتا که شبیه خوشه ای از درختان منفرد به نظر می رسد، مشغول به کار شد، اما توسط یک سیستم ریشه ژنتیکی یکسان که 106 را در بر می گیرد به هم متصل شده است. هکتار درخت در معرض خطر، که در میان قدیمیترین درختان جهان است، سنگینترین موجود زنده در نظر گرفته شده است.
کابات گفت: «اگر به دنبال «بزرگترین درخت» در گوگل باشید، همچنان ژنرال شرمن، درخت سکویا در کالیفرنیا خواهد بود. اما تا آنجا که بزرگترین ارگانیسم، پاندو است. کاری که آنها در نهایت به دنبال انجام آن هستند این است که به بازدیدکنندگان وب سایت خود این امکان را بدهند که به طور مجازی در جنگل آسپن قدم بزنند، زیرا فصل ها تغییر می کند.
اگرچه مقیاس این پروژه متفاوت است، اما از آنچه اسکندرووا در سطحی دانهدارتر با ردپای دایناسور انجام میدهد دور نیست – بازسازی خطوط شکننده یک محیط با فتوگرامتری برای مستندسازی وجود آن و، امیدواریم، حفظ آن برای آیندگان.
او گفت: “با ردیابی یا هر فسیل، این کار تقریباً کارآگاهی است.” شما فقط وارد شوید و به آرامی جزئیات بیشتری را پیدا کنید و
داستانی در پشت بقایا بسازید.
درباره فتو گرامتری بیشتر بدانید
برای قرن ها، فتوگرامتری نقش مهمی در درک ما از اجرام دور و سطح زمین بازی کرده است. کاربردهای آن در طول سال ها گسترش یافته و منجر به طیف قدرتمندی از فناوری های تغییر دهنده بازی در صنایعی مانند ساخت و ساز، مهندسی، پزشکی و موارد دیگر شده است.
فتوگرامتری اندازه گیری ها و داده های مربوط به یک شی را با تجزیه و تحلیل تغییر موقعیت از دو تصویر مختلف جمع آوری می کند. از چیزهایی مانند پرسپکتیو، نرم افزار پردازش پیشرفته و تجزیه و تحلیل عکس برای انجام کار استفاده می کند، اما می تواند روی زمین یا از هوا رخ دهد. در این راهنما، انواع مختلف فتوگرامتری و نحوه استفاده از آن را توضیح خواهیم داد.
مبانی فتوگرامتری
روند فتوگرامتری می تواند متفاوت باشد، اما ایده کلی حول جمع آوری اطلاعات در مورد یک شی از عکس های آن می چرخد. عکسها از مکانها و زوایای مختلف گرفته شدهاند تا محاسبات دقیقی انجام شود که به تحلیلگران کمک میکند دادههای مورد نظر خود را جمعآوری کنند. به طور معمول، آنها از چیزهایی مانند تفسیر عکس و روابط هندسی برای جمع آوری اندازه گیری ها استفاده می کنند. با داده های جمع آوری شده از فتوگرامتری، می توانیم نقشه ها و مدل های سه بعدی صحنه های دنیای واقعی را ایجاد کنیم.
این فناوری برای مدت طولانی وجود داشته است و بخش مهمی از انواع تحقیقات در قرن گذشته بوده است. اصول آن به تحقیقات لئوناردو داوینچی در مورد چشم انداز در سال 1480 برمی گردد – و بسیاری از تئوری ها می گویند که حتی بیشتر از این هم پیش می رود. پس از اختراع پرواز و جنگ جهانی دوم، فناوری فتوگرامتری با طراحی های قدرتمند دوربین و هواپیماهای جدید که به طور خاص برای عکاسی هوایی و موقعیت یابی بهتر دوربین ساخته شدند، واقعاً افزایش یافت. تمام اختراعات جدید حتی فتوگرامتری را روی ماه برای نقشه برداری از سطح آن در طول ماموریت های آپولو قرار دادند.
اگر کلمه را بشکنیم، به وضوح میتوانیم تمام قسمتهایی که فتوگرامتری را در بازی تشکیل میدهند، ببینیم. “عکس” به نور، “گرم” به معنای ترسیم و “متری” به اندازه گیری اشاره دارد. فتوگرامتری از عکسها برای جمعآوری اندازههایی استفاده میکند که با آنها میتوانیم نقشهها و مدلهایی ایجاد کنیم.
فتوگرامتری هوایی چیست؟
گرفتن عکس های هوایی یکی از رایج ترین روش ها برای ترسیم نقشه یک منطقه است. در این فرآیند دوربینی بر روی هواپیما نصب می شود و با محور عمودی یا نزدیک به عمود به سمت زمین نشانه می رود. همانطور که هواپیما مسیر پرواز خود را دنبال می کند، دوربین چندین عکس روی هم قرار می گیرد که سپس در چیزی به نام پلاتر استریو پردازش می شود.
پلاتر استریو ابزاری است که با مقایسه دو عکس مختلف و انجام محاسبات لازم به تعیین ارتفاعات کمک می کند. با کمک نرم افزار فتوگرامتری می توانیم این اطلاعات را پردازش کرده و از آن مدل های دیجیتالی بسازیم.
فتوگرامتری زمینی چیست؟
این تصاویر از یک موقعیت ثابت روی زمین با محور دوربین موازی با زمین گرفته شده است. داده های مربوط به موقعیت دوربین، مانند مختصات آن، در زمان گرفتن عکس جمع آوری می شود. ابزار مورد استفاده برای عکاسی زمینی اغلب تئودولیت هستند، اگرچه گاهی اوقات از دوربین های معمولی نیز استفاده می شود. فتوگرامتری زمینی برای نقشه برداری معمولاً به منابع کمتر و تکنسین های ماهر برای انجام نیاز دارد، اما ممکن است مدت بیشتری طول بکشد تا بخش بزرگی از زمین را پوشش دهد.
فتوگرامتری فضایی چیست؟
فتوگرامتری فضایی با حرکت در مقیاس بزرگتر با دوربین هایی که روی زمین، در یک ماهواره مصنوعی یا روی ماه یا سیاره دیگری قرار دارند، انجام می شود. در واقع، فتوگرامتری به عنوان بخش کلیدی اکتشافات فضایی حتی در دهه 60 مطرح میشد و پیشرفتهای تکنولوژیکی آن را مرتبطتر کرده است. می تواند در مورد الگوهای ابر به ما بگوید، نقشه های دقیقی از زمین ایجاد کند و داده هایی را در مورد سیارات دور جمع آوری کند.
انواع عکس
از آنجایی که فتوگرامتری هوایی یکی از رایج ترین روش ها است، بیایید نگاهی به نحوه طبقه بندی آن عکس ها بیندازیم.
به طور معمول، عکس های هوایی تحت یکی از دو دسته قرار می گیرند:
عکس های عمودی: این تصاویر زمانی رخ می دهند که محور دوربین عمودی باشد. بنابراین، اگر دوربین را در هواپیما قرار دهید، لنز آن به سمت زمین قرار می گیرد تا دید پرنده را ببینید.
عکسهای کجشده: اگرچه ممکن است محور تقریباً عمودی باشد، اما کجهای هواپیما میتوانند باعث کج شدن ناخواسته تصویر در یک جهت شوند. در دسته عکسهای کج، عکسهای مایل را داریم که در آنها میتوانید خط افق را ببینید و عکسهای مایل کم که در آن افق ظاهری وجود ندارد. طبقه بندی بستگی به سطح شیب دوربین از محور عمودی آن دارد.
لنز دوربین نیز می تواند طیف وسیعی از پوشش را ارائه دهد. به عنوان مثال، یک لنز با زاویه فوق عریض، میدان دید بزرگ تری را نسبت به یک لنز با زاویه معمولی می گیرد. این تصویر بیشتر را در مناظر خود جمع آوری می کند، اما بسته به طراحی لنز و دوربین، می تواند در لبه های آن اعوجاج ایجاد کند.
هنگام جمع آوری عکس های هوایی، اپراتورها تصاویر زیادی را پشت سر هم می گیرند. این تصاویر باید با یکدیگر همپوشانی داشته باشند، بنابراین نرم افزار پردازش تصویر می تواند تغییرات را شناسایی کند و درک کند که اشیاء خاص در کجا قرار می گیرند. زمانی که بتواند آن موارد رایج را ثبت کند، میتواند به طور موثرتری عکسها را به هم بچسباند یا اطلاعاتی در مورد موقعیت آنها جمعآوری کند.
اصول فتوگرامتری چیست؟
این فرآیند میتواند پیچیده باشد، اما همه چیز به مفهوم مثلثسازی برمیگردد. مثلث سازی شامل گرفتن عکس از حداقل دو مکان مختلف است. این تصاویر خطوط دید را ایجاد می کنند که از هر دوربین به نقاط خاصی از جسم مورد عکس برداری منتهی می شود. تقاطع این خطوط به محاسبات ریاضی کمک می کند که به تولید مختصات سه بعدی نقاط مشخص شده کمک می کند.
مثلث سازی در زمینه های مختلف، از کشاورزی گرفته تا اطلاعات نظامی استفاده می شود، اما معمولاً با نقشه برداری زمین همراه است. نقشه برداران از تئودولیت ها و مثلث سازی برای جمع آوری مکان یک نقطه با کمک اندازه گیری زاویه استفاده می کنند. شبکه های مثلثی همچنین می توانند با به حداکثر رساندن دقت به سیستم نقشه برداری کمک کنند.
این در واقع شبیه به نحوه عملکرد چشمان ما و ایجاد عمق است. درک عمق زمانی اتفاق می افتد که ما یک شی را از زوایای کمی متفاوت می بینیم، آن زوایایی که از هر یک از چشمان ما می آیند. مغز ما این دو تصویر را پردازش میکند و آنها را به یک تصویر واحد تبدیل میکند که میتوانیم آن را در فرآیندی به نام استریوپسیس درک کنیم. کل این فرآیند شبیه مثلث بندی است.
ویژگی های لازم
برخی از جنبه ها برای هر مدل فتوگرامتری ضروری است. این ویژگی ها عبارتند از:
نقاط کراوات: نقاط کراوات مختصاتی هستند که میتوانند بین چندین تصویر همپوشانی پیوند داده شوند. به طور معمول، اینها ویژگی هایی هستند که در هر دو یا همه عکس های شما وجود دارد. نقاط کراوات به تنظیم عکس با مختصات مشترک کمک می کند.
نقاط کنترل زمینی (GCP): GCP ها به جهت دهی تصویر در ارتباط با سطح زمین کمک می کنند. آنها از مختصات شناخته شده برای قرار دادن تصویر در دنیای واقعی استفاده می کنند.
تنظیم بسته: این تنظیم به حذف هرگونه اعوجاج در مجموعه ای از تصاویر کمک می کند. خطاهای نقاط تصویر واقعی و پیش بینی شده را کاهش می دهد.
انواع فتوگرامتری
در حالی که میتوانیم فتوگرامتری را بر اساس مکان دوربین طبقهبندی کنیم، میتوانیم موارد را بر اساس نوع فتوگرامتری که انجام میشود نیز تجزیه کنیم. این انواع بر اساس نوع داده های جمع آوری شده متفاوت است.
دو شکل از فتوگرامتری که احتمالاً با آنها روبرو خواهید شد عبارتند از:
تفسیری: فتوگرامتری تفسیری همه چیز در مورد شناسایی اشیاء و جمع آوری عوامل مهم از یک تصویر با تجزیه و تحلیل دقیق و سیستماتیک است. مترجمان عکس با تجزیه و تحلیل و ارزیابی دقیق عکس ها، اطلاعاتی در مورد موضوعات خود مانند ویژگی ها و ویژگی ها جمع آوری می کنند. این کار ممکن است شامل فناوری های سنجش از راه دور باشد. سنجش از دور تفسیر عکس را با دادههای ابزار سنجش از دور، مانند دوربینهای ماهوارهها یا هواپیماها و سیستمهای سونار روی کشتیها، ترکیب میکند.
متریک: در فتوگرامتری متریک، هدف یافتن اندازه گیری است. یک محقق ممکن است دادهها و اندازهگیریهای خاصی را از یک عکس با کمک اطلاعات دیگر در مورد صحنه استخراج کند.
فتوگرامتری متریک همچنین نقشه های پلان سنجی و توپوگرافی را پوشش می دهد:
نقشه برداری پلان سنجی بر روی هواپیماها تمرکز می کند و عناصر خارج از ارتفاع مانند جاده ها، رودخانه ها و دریاچه ها را شامل می شود. این ویژگی های توپوگرافی را نادیده می گیرد و فقط بر روی اشیاء جغرافیایی تمرکز می کند.
نقشه برداری توپوگرافی برعکس عمل می کند و شکل زمین و ارتفاعات و خطوط آن را آشکار می کند. سطح زمین را در مقایسه با یک نقطه مرجع خاص مانند سطح دریا نشان می دهد و می تواند برای سطوح زیر آب نیز استفاده شود.
کاربردهای فتوگرامتری
روشهایی که فتوگرامتری زنده میشود میتواند به طور گستردهای بر اساس روش جمعآوری، دادههای جمعآوریشده، استفاده صنعتی و فناوریهای سازگار متفاوت باشد.
برخی از محصولات حاصل از این فرآیند عبارتند از ارتوموزائیک، مدلهای سطح دیجیتال و مدلهای دیجیتال زمین. ارتوموزائیک اساساً یک نمای چشم پرنده از یک زمین است که برای اعوجاج تنظیم می شود و می تواند مناظر وسیع را در بر بگیرد. مدلهای سطح دیجیتال و مدلهای دیجیتال زمین نمایانگر سطوح و ارتفاع هستند. مدلهای سطحی شامل ساختمانها و درختان میشوند، در حالی که مدل زمین از تمام این ویژگیها خلاص میشود و ارتفاع زمین برهنه را نشان میدهد.
متداول ترین کاربرد فتوگرامتری ایجاد نقشه ها از عکس های هوایی است. مقرون به صرفه و دقیق است و به مؤسسات برنامهریزی مانند معماران، دولتهای محلی و کارگران ساختمانی اجازه میدهد تا بدون صرف ماهها برای بررسی چشمانداز، تصمیمهای شفاف و آگاهانه در مورد پروژههای خود بگیرند. همچنین بسیار دقیق است و می تواند سطح استثنایی از اطلاعات را در مورد یک منطقه ارائه دهد.
فتوگرامتری نشان خود را در مجموعهای از صنایع، از تحقیقات پزشکی گرفته تا فیلم و سرگرمی، میگذارد. در اینجا برخی از مکان هایی است که می توانید آن را پیدا کنید:
1. نقشه برداری زمین
ما قبلاً در مورد کاربردهای فتوگرامتری در نقشه برداری عمرانی بحث کرده ایم که نتایج آن توسط بسیاری از نهادها از جمله خدمه ساختمانی، دولت ها، برنامه ریزان ساختمان و معماران استفاده می شود. تمام داده های جمع آوری شده از فتوگرامتری آنها را در مورد همه چیز از اقدامات ایمنی لازم تا نتایج بالقوه پروژه مطلع می کند.
2. مهندسی
در دنیای مهندسی، عکاسی با پهپاد به ارزیابی سایتها برای ساخت و ساز و همچنین ایجاد تصاویر پرسپکتیو و رندرهای سه بعدی کمک میکند. مهندسان می توانند تصاویری از نتایج یا پیش نمایش های پروژه تولید کنند و همچنین پیشرفت فعلی آنها را تجزیه و تحلیل کنند.
3. املاک و مستغلات
در عصر دیجیتال، که در آن 80 تا 81 درصد از هزارهها خانههای خود را از طریق دستگاههای تلفن همراه پیدا میکنند، ایجاد فهرستهای جذاب و دقیق میتواند تجربه خرید و درک آنها از خرید را به میزان قابل توجهی بهبود بخشد. بینندگان می توانند خانه را از همه جهات ببینند و ایده روشنی از آنچه که به آن نگاه می کنند به دست آورند.
4. اطلاعات نظامی
فتوگرامتری همچنین در جمع آوری داده ها برای برنامه های نظامی نقش دارد. مدل های جغرافیایی مکانی دقیق با زمان پردازش کم برای درک یک منظر ضروری هستند. تصاویر هوایی و فناوری فتوگرامتری می توانند با هم کار کنند تا نقشه های سه بعدی دقیق را به سرعت و بدون هیچ گونه دخالت انسانی ایجاد کنند.
5. پزشکی
در حالی که ممکن است فکر نکنید رشته پزشکی را در رده نقشه برداری زمین قرار دهید، مدل های سه بعدی که از فناوری فتوگرامتری تهیه شده اند برای انواع مصارف مرتبط با سلامتی مفید هستند. همچنین میتواند در کنار فناوری سنجش از دور برای کمک به ایجاد تشخیص بدون روشهای تهاجمی کار کند.
6. فیلم و سرگرمی
فتوگرامتری می تواند نقش مهمی در طراحی صحنه و جهان سازی برای انواع فیلم ها و بازی های ویدئویی داشته باشد. مدلسازی سهبعدی میتواند اشیاء منحصربهفرد را در دنیای مجازی به ثمر برساند، مانند مناظر شهری برای دنبالههای اکشن و عناصر تاریخی دقیق، مانند مجسمهها و ساختمانها. یکی از فرنچایزهای محبوبی که از فتوگرامتری استفاده می کند ، بازی های “Battlefield” هستند که سبک هنری دارند که با این رندرها و سرگرمی های سه بعدی به خوبی کار می کند.
علاوه بر جهان سازی، فتوگرامتری می تواند در طراحی جلوه های ویژه و مجموعه های واقعی نیز کمک کند.
7. پزشکی قانونی
فتوگرامتری نیز در تحقیقات جنایی نقش دارد. این می تواند به مستندسازی و اندازه گیری داده های دقیق در مورد صحنه جرم کمک کند و تعیین کند که چه چیزی از نظر فیزیکی ممکن است. همچنین بسیاری از کارشناسان فتوگرامتری وجود دارند که می توانند در دادگاه کمک کنند.
8. ساخت و ساز و معدن
مهندسان و پیمانکاران پروژه می توانند از مدل های سه بعدی دقیق برای نظارت و برنامه ریزی محل کار خود استفاده کنند. اطلاعات یک مدل فتوگرامتری می تواند به ایجاد یک محل کار هوشمند با سنسورها و ویژگی های ایمنی که محیط را بهبود می بخشد کمک کند. این مدل ها به صورت پشت سر هم با وسایل نقلیه متصل کار می کنند .
9. ورزش
تجزیه و تحلیل حرکات ورزشکار می تواند به مربیان و محققان کمک کند تا بیشتر در مورد فعالیت های خود درک کنند. آنها می توانند سیستم های تمرین مجازی را توسعه دهند و در مورد تلاش بدنی که بازیکنان با ردیابی حرکات بدن خود انجام می دهند، یاد بگیرند. نقشه های توپوگرافی برای ورزشکاران فضای باز مانند کوهنوردان، کوهنوردان، اسکی بازان و اسنوبردها نیز مفید است. نقشه برداری از مناطق دوردست اغلب با کمک فناوری فتوگرامتری آسان تر است.
10. کشاورزی و جنگلداری
در کشاورزی، عکسهای هوایی میتوانند بینشی در مورد کیفیت خاک، برنامهریزی آبیاری، تغذیه و آفات ارائه دهند. کشاورزان می توانند برنامه های کاشت خود را تنظیم کنند یا آبیاری و کود را با این اطلاعات تنظیم کنند. آنها همچنین می توانند از فتوگرامتری هنگام ارزیابی رشد و خسارت محصول پس از طوفان یا سیل استفاده کنند.
تحقیق و مدیریت جنگل ها با کمک فتوگرامتری بسیار آسان تر می شود. می تواند مدل هایی برای تجزیه و تحلیل جنبه های مختلف یک جنگل، مانند حجم و ارتفاع چوب، برای درک بهتر توسعه یک جنگل تولید کند.
بیشتر بدانید ….
مبانی فتوگرامتری
قبل از تشریح عملکرد سیستم V-STARS ، مقدمه ای مختصر در مورد فتوگرامتری برای کسانی که با این فناوری آشنایی ندارند ارائه می شود.
اصل اساسی که توسط فتوگرامتری استفاده می شود، مثلث بندی است. با گرفتن عکس از حداقل دو مکان مختلف، به اصطلاح “خط دید” را می توان از هر دوربین به نقاط روی جسم توسعه داد. این خطوط دید (گاهی اوقات به دلیل ماهیت نوری آنها پرتو نامیده می شود) از نظر ریاضی برای ایجاد مختصات سه بعدی نقاط مورد نظر قطع می شوند. مثلث بندی نیز اصلی است که توسط تئودولیت ها برای اندازه گیری مختصات استفاده می شود. اگر با این ابزارها آشنایی داشته باشید، شباهتها (و برخی تفاوتها) بین فتوگرامتری و تئودولیتها پیدا خواهید کرد. حتی نزدیکتر به خانه، مثلثسازی روشی است که دو چشم شما با هم کار میکنند تا فاصله را اندازهگیری کنند (به نام درک عمق).
این پرایمر به دو قسمت تقسیم می شود. عکاسی اصول عکاسی مربوط به فتوگرامتری را توصیف می کند، در حالی که مترولوژی تکنیک های تولید مختصات سه بعدی از عکس های دو بعدی را توصیف می کند.
عکاسی – قسمت اول فتوگرامتری
البته گرفتن عکس برای اندازه گیری فتوگرامتری ضروری است. برای به دست آوردن دقت بالا، قابلیت اطمینان و اتوماسیونی که سیستم قادر به انجام آن است، عکس ها باید از بالاترین کیفیت برخوردار باشند. خوشبختانه به دلیل طراحی سیستم.
سه نکته اصلی برای عکاسی خوب عبارتند از:
میدان دید
تمرکز کردن
گرفتن در معرض
میدان دید
میدان دید دوربین میزان دید آن را مشخص می کند و تابعی از فاصله کانونی لنز و اندازه (که اغلب فرمت نامیده می شود) سنسور دیجیتال است. برای یک لنز معین، یک حسگر فرمت بزرگتر میدان دید بیشتری دارد. به طور مشابه، برای یک سنسور اندازه معین، لنز با فاصله کانونی کوتاهتر میدان دید وسیع تری دارد. رابطه بین اندازه فرمت، فاصله کانونی لنز و میدان دید در زیر نشان داده شده است:
لنزهای استاندارد موجود با V-STARS به اصطلاح لنزهای با زاویه متوسط هستند و میدان دید وسیعی در حدود 50 درجه دارند. هرچه میدان دید وسیعتر باشد، بیشتر از یک مکان مشخص میبینید. برای یک لنز با زاویه متوسط، یک قانون ساده این است که معمولاً باید به اندازه اندازه جسم از جسم دور شوید. به عنوان مثال، برای دیدن یک شی سه متری (ده پا) حدود سه متر (ده فوت) به عقب برگردید.
به طور کلی، بین میدان دید لنز و دقت تعادل وجود دارد. اگرچه لنزهای با زاویه بازتر به فضای کمتری در اطراف جسم نیاز دارند، اما دقت کمتری نیز دارند. (دلایل این امر خارج از حوصله این مقدمه است.) بنابراین، شما معمولاً می خواهید از طولانی ترین لنز با فاصله کانونی که می توانید استفاده کنید. لنزهای با زاویه متوسط ارائه شده با V-STARS نشان دهنده سازش خوبی بین میدان دید و دقت است.
تمرکز کردن
یکی از ملاحظات عکاسی معمولی، البته فوکوس کردن لنز است تا تصویر واضح باشد. محدوده وضوح قابل قبول عمق فوکوس نامیده می شود. عمق فوکوس یک لنز تابعی از عوامل زیادی است، از جمله: فاصله کانونی لنز، اندازه فرمت، فاصله دوربین تا جسم، اندازه جسم، و عدد f لنز. . همانطور که می توانید از تمام عوامل ذکر شده در بالا درک کنید، عمق فوکوس می تواند یک تابع پیچیده باشد.
V-STARS طوری طراحی شده است که تصاویر برای نقاطی بین 0.5 متر (20 اینچ) تا 60 متر (200 فوت) از دوربین فوکوس قابل قبولی داشته باشند. رفع فوکوس به طور موثر مشکل عمق فوکوس را از بین می برد.
گرفتن در معرض
نوردهی دوربین
برای اهداف فتوگرامتری، مطلوب است که اهداف را روشن و پسزمینه کم نور تنظیم کنید. هنگامی که از هدف گیری بازتابی استفاده می شود، نوردهی هدف و پس زمینه تقریباً کاملاً مستقل از یکدیگر هستند. نوردهی هدف کاملاً با قدرت فلاش تعیین می شود در حالی که نوردهی پس زمینه توسط روشنایی محیط تعیین می شود. میزان نوردهی پس زمینه توسط زمان شاتر کنترل می شود.
حذف نوردهی پسزمینه، یافتن و اندازهگیری اهداف را آسانتر میکند. با این حال، اگر هیچ تصویر پسزمینهای وجود نداشته باشد، تلاش برای فهمیدن اینکه کدام هدف ممکن است دشوار باشد. معمولاً به توافق رسیده و نوردهی پسزمینه طوری تنظیم میشود که جسم به اندازهای کمنور باشد که در اندازهگیری هدف تداخل نداشته باشد، اما همچنان به اندازهای روشن باشد که هنگام افزایش آن دیده شود.
نوردهی پس زمینه
زمان شاتر برای کنترل نوردهی پس زمینه استفاده می شود. هنگامی که دوربین خارج از خط است، زمان شاتر با استفاده از کلیدهای حالتی که در بالای دوربین در کنار نمایشگر قرار دارند انتخاب می شود. زمان های شاتر موجود در INCA2 از 8 میلی ثانیه تا 8 ثانیه متغیر است.
دوربین INCA2 دارای ویژگی AUTO Exposure است که می توان از آن برای تنظیم خودکار سرعت شاتر استفاده کرد. تنظیم پیش فرض استفاده از نوردهی خودکار است. اگر نوردهی خودکار انتخاب شده باشد، اولین باری که از یک کار عکس می گیرید، نوردهی شاتر به طور خودکار تنظیم می شود.
نوردهی هدف
تنظیم قدرت فلاش برای نوردهی هدف به فاصله دوربین تا اهداف و اندازه هدف بستگی دارد.
نمودار زیر تنظیمات توصیه شده برق فلاش را در فواصل مختلف نشان می دهد. اگر از جسم به صورت مقطعی عکس می گیرید، از اندازه بخش ها استفاده کنید. جداول فرض می کنند که از اندازه هدف توصیه شده (که در لیست نیز آمده است) استفاده شده است. اگر اهداف کوچکتر از این هستند، ممکن است بخواهید تنظیم قدرت فلاش را یک مرحله برای کمک به جبران افزایش دهید.
جداول فرض میکنند که عدد f لنز پیشفرض F11 با INCA استفاده میشود. مهم است که لنز را بررسی کنید و مطمئن شوید که روی f11 تنظیم شده است، تنظیم پیش فرض لنز.
مترولوژی
مترولوژی – بخش دوم فتوگرامتری
عکاسی در معنای وسیع آن فرآیندی است که دنیای سه بعدی واقعی را به تصاویر مسطح دو بعدی تبدیل می کند. دوربین دستگاهی است که این تبدیل یا نقشه برداری را از 3 بعدی به 2 بعدی انجام می دهد. متأسفانه، ما نمی توانیم جهان سه بعدی را به طور کامل به دو بعد ترسیم کنیم، بنابراین برخی از اطلاعات (در درجه اول عمق) از بین می روند.
فتوگرامتری در معنای وسیع آن، فرآیند عکاسی که در بالا توضیح داده شد را معکوس می کند. این تصاویر 2 بعدی مسطح را به دنیای واقعی 3 بعدی تبدیل یا نقشه می کند. با این حال، از آنجایی که اطلاعات در فرآیند عکاسی از بین میرود، نمیتوانیم دنیای سه بعدی را تنها با یک عکس به طور کامل بازسازی کنیم. به عنوان حداقل، ما به دو عکس مختلف برای بازسازی دنیای سه بعدی نیاز داریم. اگر این فرآیند عالی بود، این دو عکس بیش از اطلاعات کافی برای بازسازی کامل دنیای 3 بعدی هستند که نشان میدهند. متأسفانه، فرآیند عکاسی و اندازه گیری کامل نیست، بنابراین بازسازی دنیای سه بعدی نیز ناقص است. با این حال، میتوانیم عکسهای بیشتری بگیریم و از اطلاعات اضافی موجود در آنها برای بهبود روند استفاده کنیم.
فتوگرامتری از اصل اولیه مثلث سازی استفاده می کند که به موجب آن از خطوط متقاطع در فضا برای محاسبه مکان یک نقطه در هر سه بعد استفاده می شود. با این حال، برای مثلث کردن مجموعه ای از نقاط، باید موقعیت دوربین و زوایای هدف (با هم جهت گیری نامیده می شود) را برای همه عکس های مجموعه دانست. فرآیندی به نام رزکسیون این کار را انجام می دهد. در نهایت، چون دوربین V-STARS یک ابزار اندازه گیری دقیق است، باید کالیبره شود تا بتوان خطاهای آن را تعریف و حذف کرد. یکی از قدرتمندترین ویژگی های V-STARS توانایی آن در تولید این کالیبراسیون دوربین به عنوان محصول جانبی اندازه گیری در فرآیندی به نام خود کالیبراسیون است.
اگرچه هر یک از این تکنیک ها به بهترین شکل به طور جداگانه توضیح داده می شوند، اما در واقع همه آنها به طور همزمان در فرآیندی به نام تنظیم بسته ای انجام می شوند.
مثلث سازی
مثلثسازی اصلی است که هم فتوگرامتری و هم تئودولیتها برای اندازهگیری نقطههای سه بعدی استفاده میکنند. با تقاطع ریاضی خطوط همگرا در فضا، مکان دقیق نقطه را می توان تعیین کرد. با این حال، بر خلاف تئودولیت ها، فتوگرامتری می تواند چندین نقطه را در یک زمان اندازه گیری کند و تقریباً هیچ محدودیتی در تعداد نقاط مثلثی به طور همزمان وجود ندارد.
در مورد تئودولیت ها، دو زاویه برای ایجاد یک خط از هر تئودولیت اندازه گیری می شود. در مورد فتوگرامتری، موقعیت دوبعدی (x,y) هدف روی تصویر است که برای تولید این خط اندازه گیری می شود. با گرفتن عکس از حداقل دو مکان مختلف و اندازه گیری یک هدف در هر تصویر، یک “خط دید” از هر مکان دوربین به سمت هدف ایجاد می شود. اگر مکان دوربین و جهت هدف مشخص باشد (ما نحوه انجام این کار را در Resection توضیح می دهیم)، خطوط را می توان به صورت ریاضی قطع کرد تا مختصات XYZ هر نقطه هدف را تولید کند.
برداشتن
برداشتن روشی است که برای تعیین موقعیت و هدف نهایی (به نام جهت) دوربین در هنگام عکسبرداری استفاده می شود. معمولاً تمام نقاطی که در XYZ در تصویر دیده می شوند و شناخته می شوند برای تعیین این جهت استفاده می شوند.
V-STARS از عملیات AutoStart یا SuperStart برای بدست آوردن جهت اولیه دوربین استفاده می کند. این جهت گیری بر اساس نوار خودکار یا هر هدف کدگذاری شده شناخته شده است.
برای برداشتن قوی، شما باید حداقل دوازده نقطه به خوبی توزیع شده در هر عکس داشته باشید. اگر اندازه گیری شما این تعداد امتیاز را ندارد یا به خوبی توزیع نشده است، توصیه می شود امتیاز اضافه کنید. به نقاطی که برای تقویت محلول اضافه می شود، نقاط «پر کردن» می گویند.
اگر مختصات XYZ نقاط روی جسم مشخص باشد (ما در Triangulation توضیح می دهیم که چگونه این کار انجام می شود)، می توانیم جهت دوربین را محاسبه کنیم. توجه به این نکته مهم است که هم موقعیت و هم جهت هدف گیری دوربین مورد نیاز است. دانستن تنها موقعیت دوربین کافی نیست زیرا دوربین می تواند در همان مکان قرار گیرد اما به هر جهتی هدف قرار گیرد. در نتیجه، ما باید موقعیت دوربین را که با سه مختصات مشخص میشود، و محل هدف قرار گرفتن آن با سه زاویه مشخص میشود، بدانیم. بنابراین، اگرچه برای تعریف یک نقطه هدف به سه مقدار نیاز است (سه مختصات برای موقعیت آن)، برای تعریف یک تصویر به شش مقدار نیاز داریم (سه مختصات برای
موقعیت و سه زاویه برای جهت هدف).
خود کالیبراسیون
اگرچه دوربین ها و لنزهای استفاده شده در سیستم V-STARS از بالاترین کیفیت برخوردار هستند، اما همچنان باید به طور دقیق کالیبره شوند تا خطاهای موجود در سیستم حذف شوند. برخی از این عبارات خطا را می توان بر اساس علت فیزیکی آنها توصیف کرد در حالی که برخی دیگر بیشتر به صورت تجربی مشتق شده اند. در هر صورت، تمام این عبارات خطا بهطور خودکار توسط V-STARS به همراه مختصات XYZ نقاط هدف و جهت (موقعیت و زوایای هدف) هر تصویر در فرآیندی به نام تنظیم بستهای حل میشوند.
این قابلیت کالیبره کردن دوربین به عنوان محصول جانبی اندازهگیری، خود کالیبراسیون نامیده میشود و به این معنی است که دوربین در زمان اندازهگیری و تحت شرایط محیطی (دما، رطوبت و غیره) در زمان اندازهگیری کالیبره میشود. اندازه گیری. این بسیار برتر از تکیه بر یک کالیبراسیون آزمایشگاهی قدیمی و احتمالاً منسوخ است که ممکن است در شرایط کاملاً متفاوتی نسبت به زمان اندازهگیری انجام شده باشد.
الزامات خاصی وجود دارد که برای کالیبره کردن یک دوربین باید رعایت شود، اما انجام آنها معمولاً آسان است. ابتدا، اندازه گیری باید دارای چیزی باشد که به آن تنوع رول می گویند. این معمولاً به این معنی است که باید تعدادی عکس با دوربین افقی و تعدادی عکس با دوربین عمودی بگیرید. اگرچه اگر نیمی از عکس های خود را یک طرفه و نیمی دیگر را بگیرید، نتایج بهتری خواهید گرفت، اما این مهم نیست. آنچه مهم است این است که شما باید حداقل یک عکس داشته باشید که تقریباً 90 درجه متفاوت از بقیه باشد.
اگر این کار را نکنید، نمی توانید دوربین را خود کالیبره کنید. در عوض، باید به یک کالیبراسیون از قبل موجود اعتماد کنید که کمتر قابل اعتماد و دقیق است.
شرط دوم این است که شما باید حداقل تعداد عکس های گرفته شده از حداقل تعداد مکان های مختلف را اندازه گیری کنید. اگر جسم دو بعدی است (شیء اساساً مسطح است) باید حداقل شش عکس یا اگر جسم سه بعدی است چهار عکس اندازه گیری کنید. همچنین، عکس ها باید حداقل از سه مکان مختلف گرفته شوند. از آنجایی که اکثر مشاغل حداقل این تعداد عکس می گیرند، معمولاً دلیلی وجود ندارد که دوربین را خود کالیبره نکنید. در واقع، ما قویاً توصیه میکنیم که همیشه به اندازه کافی عکس بگیرید تا دوربین را خود کالیبره کنید، زیرا گرفتن و اندازهگیری عکسهای اضافی بسیار سریع و آسان است.
شرط نهایی این است که شما باید حداقل تعداد نقاط به خوبی توزیع شده روی هر عکس و برای کل اندازه گیری داشته باشید. به طور خاص، شما باید حداقل دوازده نقطه به خوبی در هر عکس و حداقل بیست نقطه برای کل اندازه گیری داشته باشید. توزیع خوب به این معنی است که نقاط به طور نسبتاً مساوی در سراسر عکس توزیع شده اند. برای مثال، بسیار بهتر است که دوازده نقطه به طور مساوی در سراسر تصویر توزیع شده باشد تا اینکه پنجاه نقطه در یک منطقه کوچک در کنار هم قرار گیرند. اگر اتفاقاً به این تعداد امتیاز برای اندازه گیری نیاز ندارید یا به خوبی توزیع نشده اند، توصیه می کنیم امتیازهایی را به اندازه گیری اضافه کنید. همانطور که خواهید دید، اضافه کردن امتیاز اضافی به اندازه گیری بسیار سریع و آسان است، بنابراین با خیال راحت این کار را انجام دهید.
تنظیم بسته نرم افزاری
Bundle Adjustment برنامهای است که اندازهگیریهای عکاسی را برای تولید مختصات XYZ نهایی تمام نقاط اندازهگیری شده پردازش میکند. برای انجام این کار، باید نقاط مورد نظر را مثلثی کند، تصاویر را بردارید و دوربین را خود کالیبره کند. برنامه Bundle Adjustment STAR نام دارد که مخفف Self-Calibration، Triangulation و Resection است.
قدرت واقعی تنظیم بسته نرم افزاری این است که می تواند هر سه این کارها را به طور همزمان انجام دهد. اگر توضیحات Triangulation و Resection را مرور کنید، به نظر می رسد مشکلی وجود دارد. برای اینکه نقاط اندازه گیری شده را مثلث کنیم باید جهت عکس ها را بدانیم.
اما برای جهت دهی به تصاویر باید مختصات نقاط اندازه گیری شده را بدانیم. چگونه در اینجا شروع کنیم- پاسخ این است که تنظیم باندل این قابلیت را دارد که هر دو را به طور همزمان تشخیص دهد و دوربین را نیز خود کالیبره کند! این جایی است که نام تنظیم بسته نرم افزاری از آنجا می آید زیرا همه این موارد را با هم جمع می کند و همه آنها را همزمان حل می کند.
با این حال، Bundle Adjustment به کمک کمی نیاز دارد. برای شروع باید جهت گیری اولیه برای هر عکس را داشته باشد. این جهت گیری اولیه با رویه های AutoStart یا SuperStart که برای هر عکس انجام می شود، انجام می شود.
وقتی STAR تمام شد، موارد زیر را تولید می کند:
1. مختصات XYZ (و برآورد دقت) برای هر نقطه
2. مختصات XYZ و 3 زاویه هدف (و تخمین دقت) برای هر تصویر.
V-STARS در حالت تک دوربین دقتی قابل مقایسه با سایر سیستمهای اندازهگیری مختصات با حجم بالا و دقت بالا مانند تئودولیتهای دیجیتال، ماشینهای اندازهگیری مختصات (CMM) و ردیابهای لیزری ارائه میدهد. دقت معمولی 25 تا 50 میکرون (0.001 اینچ تا 0.002 اینچ) روی یک جسم 3 متری (ده پا) برای INCA2 و 50 تا 100 میکرون (0.002 اینچ تا 0.004 اینچ) روی یک جسم 3 متری (ده پا) برای سیستم E3
با این حال، دقت اندازه گیری فتوگرامتری می تواند به طور قابل توجهی متفاوت باشد زیرا دقت به چندین عامل مرتبط با هم بستگی دارد. مهمترین آنها عبارتند از:
1. وضوح (و کیفیت) دوربینی که استفاده میکنید،
2. اندازه جسمی که اندازهگیری میکنید،
3. تعداد عکسهایی که میگیرید، و
4. طرحبندی هندسی عکسها نسبت به شی و به یکدیگر.
نمودار زیر تأثیر چهار عامل و تأثیر آنها بر دقت را نشان می دهد.
نمودار نشان دهنده یک هرم با چهار عامل در پایه هرم و دقت بالا در بالای هرم است. برای به دست آوردن دقت بالاتر (هرم بالاتر) به موارد بیشتری نیاز دارید که در خطوط هرم نشان داده شده است (رزولیشن بالاتر، اندازه کوچکتر، عکس های بیشتر، و هندسه گسترده تر، اما نه خیلی عریض). به پیوست A مراجعه کنید. – “V-STARS چقدر دقیق است؟”
فتوگرامتری مقیاس بندی
اندازه گیری های فتوگرامتری ذاتاً بدون بعد هستند. نمونه ای از آن در زیر نشان داده شده است. تصویر ماشین اول می تواند تصویری از یک ماشین فول سایز یا یک مدل جعبه کبریت باشد. راهی برای گفتن وجود ندارد با این حال، اگر اندازه چیزی را که در تصویر نیز وجود دارد بدانیم، اکنون می توانیم چیزی در مورد اندازه خودرو بگوییم. (تئودولیت ها یکی دیگر از فناوری های ذاتاً بدون بعد هستند).
برای مقیاس بندی یک اندازه گیری فتوگرامتری، باید حداقل یک فاصله شناخته شده داشته باشیم. اگر مختصات واقعی برخی از نقاط هدف را از قبل بدانیم، میتوانیم فواصل بین این نقاط را محاسبه کرده و از آنها برای مقیاس اندازهگیری استفاده کنیم. امکان دیگر استفاده از فیکسچر با اهداف روی آن و اندازه گیری آن همراه با جسم است. فاصله بین اهداف روی میله مشخص است و می توان از آن برای مقیاس اندازه گیری استفاده کرد. چنین وسایلی معمولاً میله های مقیاس نامیده می شوند.
همچنین به پیوست کردن نوار مقیاس (ها) و سؤالات پیوست A در مورد مقیاس مراجعه کنید.
فاصله های مقیاس چندگانه
در صورت امکان، باید از بیش از یک فاصله برای مقیاس اندازه گیری استفاده کنید. V-STARS اندازه گیری های مقیاس فردی را برای ارائه دقت مقیاس بالاتر ترکیب می کند. مهمتر از آن، این به شما امکان می دهد تا خطاهای مقیاس را پیدا کنید. این مهم است زیرا هنگامی که از یک فاصله مقیاس استفاده می شود و خطا دارد، کل اندازه گیری به اشتباه مقیاس می شود. از طرف دیگر، اگر چندین فاصله مقیاس دارید، خطاهای مقیاس قابل شناسایی و حذف هستند. با دو فاصله شناخته شده، اگر یکی در خطا باشد، میتوانید خطای مقیاس را تشخیص دهید، اما معمولاً نمیتوانید تشخیص دهید که کدام یک خطا دارد. (البته گاهی اوقات با بررسی نقاط مقیاس می توانید متوجه شوید). با سه فاصله مقیاس شناخته شده، معمولاً می توانید تشخیص دهید که آیا یکی از آنها خطا دارد و آن را حذف کنید.
هنگامی که از میله های مقیاس استفاده می شود، یک تکنیک خوب استفاده از میله ای است که بیش از دو هدف دارد. تکنیک دیگر استفاده از بیش از یک نوار مقیاس است. از طرف دیگر، می توانید از هر دو تکنیک استفاده کنید. این به شما بستگی دارد، اما، در صورت امکان، باید از فواصل مقیاس چندگانه استفاده کنید.
فواصل در مقیاس طولانی
فاصله(های) مقیاس باید به اندازه عملی باشد زیرا هرگونه عدم دقت در فاصله(های) مقیاس با نسبت اندازه جسم به فاصله مقیاس بزرگتر می شود. به عنوان مثال، اگر از فاصله مقیاس یک متری (40 اینچ) روی یک جسم 10 متری (400 اینچی) استفاده شود، و فاصله مقیاس 0.1 میلی متر (0.004 اینچ) خطا داشته باشد، آن شی ده برابر این خطا خواهد داشت، یا 1 میلی متر (0.040 اینچ).
در برخی موارد، اندازه گیری ممکن است نیازی به مقیاس بندی دقیق نداشته باشد. به عنوان مثال، برخی از اندازهگیریهای سطح یا شکل به مقیاس دقیق نیاز ندارند. در این حالت می توانید از فواصل اسمی برای ارائه مقیاس استفاده کنید یا می توانید از AutoBar برای مقیاس استفاده کنید. با این حال، نوار خودکار برای مقیاس دقیق اندازه گیری بسیار کوچک است.
اندازه گیری
مهم نیست که چه نوع اندازه گیری را انجام می دهید، اندازه گیری با V-STARS معمولاً شامل مراحل زیر است.
1. برنامه ریزی اندازه گیری
2. هدف قرار دادن شی
3. گرفتن عکس
4. اندازه گیری تصاویر
5. پردازش تصاویر (برای بدست آوردن مختصات سه بعدی)
6. تجزیه و تحلیل نتایج (دستکاری نتایج برای کمک به بررسی و تجسم نتایج)
لیست بالا یک راهنمای کلی است. با این حال، هر پروژه اندازه گیری متفاوت است، و بنابراین محتوا و حتی گاهی اوقات ترتیب مراحل ذکر شده در بالا ممکن است بسته به نیاز پروژه و گاهی اوقات ترجیح اپراتور متفاوت باشد. برای مثال، در برخی از پروژهها، ابتدا همه عکسها را میگیرید (برای به حداقل رساندن زمان در محل معمولاً) و سپس آنها را اندازهگیری میکنید، در حالی که در برخی دیگر، هر عکس را پس از گرفتن اندازه میگیرید. در پروژههای دیگر، تعدادی عکس میگیرید و اندازهگیری میکنید و سپس آنها را پردازش میکنید تا نتایج اولیه را به دست آورید تا بتوانید اندازهگیری تصاویر باقیمانده را آسانتر کنید. با این حال، تمام مراحل ذکر شده در بالا به روشی در هر پروژه انجام می شود. هر یک از این مراحل در فصل های بعدی به تفصیل توضیح داده شده است.
برنامه ریزی اندازه گیری
برنامه ریزی مناسب برای انجام یک اندازه گیری موفق ضروری است. این به ویژه اگر اندازه گیری پیچیده باشد یا برای اولین بار است که این نوع اندازه گیری خاص را انجام می دهید، صادق است. برای برنامه ریزی صحیح باید اطلاعاتی در مورد اندازه گیری داشته باشید. از لیست سوالات زیر برای کمک به برنامه ریزی اندازه گیری استفاده کنید.
سوالاتی که باید بپرسید: “V-STARS” را به خاطر بسپارید
V isibility – آیا نقاط مورد نظر روی جسم قابل مشاهده هستند؟ به یاد داشته باشید که V-STARS یک فناوری “خط دید” است که بر پایه مثلث سازی است. این بدان معناست که نقاط باید حداقل از دو مکان مختلف برای اندازه گیری دیده شوند. برای دقت بیشتر، نقاط باید از مکان های بسیار متفاوت و از بیش از دو مکان دیده شوند. (برای جزئیات بیشتر در مورد چگونگی تأثیر هندسه و تعداد عکس ها بر دقت، به اندازه گیری دقت مراجعه کنید).
همچنین، به یاد داشته باشید که V-STARS هرگز نقاط مورد علاقه را به طور مستقیم اندازه گیری نمی کند. در عوض، V-STARS اهداف بازتابی را که بر روی نقاط مورد نظر قرار میگیرند یا در یک رابطه شناخته شده با آنها قرار گرفتهاند، اندازهگیری میکند. اگر نقطه مورد علاقه به طور مستقیم قابل مشاهده نباشد، اغلب می توان نوعی هدف افست را برای اندازه گیری نقطه به طور غیرمستقیم ابداع کرد.
S ize and Shape – اندازه و شکل جسم چیست؟ اندازه و شکل (محدب، مقعر، یک طرفه، چند وجهی، و غیره) تعیین می کند که اندازه گیری چقدر پیچیده خواهد بود، چقدر فضای اطراف جسم نیاز دارید، و میزان دقتی که می توانید بدست آورید. اندازه و شکل نیز تعیین می کند که چه نوع و اندازه اهداف مورد استفاده قرار می گیرد.
T argeting – آیا می توان نقاط مورد علاقه روی شی را هدف قرار داد؟ اگر نمی توانند، باید از روش دیگری استفاده کنید ( برای مثال V-STARS در حالت دوربین چندگانه با استفاده از پروب لمسی، برای جزئیات به کتابچه راهنمای V-STARS/M مراجعه کنید). هدف قرار دادن شی برای به دست آوردن اندازه گیری های مورد نظر شما اغلب می تواند یکی از چالش برانگیزترین و زمان برترین جنبه های یک پروژه باشد. برای اطلاعات بیشتر به هدف گذاری مراجعه کنید.
دقت – چه سطحی از دقت مورد نظر یا مورد نیاز است؟ توجه داشته باشید که هر دو عبارت مورد نظر و مورد نیاز استفاده می شود. تشخیص اینکه چه سطحی از دقت مورد نظر است و چه سطحی از دقت قابل قبول است مهم است. گرفتن عکس های بیشتر می تواند دقت فتوگرامتری را به میزان قابل توجهی افزایش دهد. درک این نکته مهم است که این بهبود دقت به نقطه بازگشت کاهشی خواهد رسید.
این مبادله باید هنگام تصمیم گیری برای گرفتن تعداد عکس در نظر گرفته شود. برای جزئیات بیشتر در مورد عوامل (از جمله تعداد عکس) که بر دقت تأثیر می گذارد، به اندازه گیری دقت مراجعه کنید.
همچنین مهم است که سطح دقت را به روشی واضح و بدون ابهام تعریف کنید. راه های زیادی برای تعیین دقت وجود دارد. به عنوان مثال، آیا دقت مشخص شده یک محدوده مطلق است (به این معنی که هیچ مقداری نباید خارج از کل محدوده باشد) یا یک مقدار RMS است (به این معنی که به طور متوسط 67٪ از مقادیر در محدوده مثبت یا منفی مشخصات دقت قرار دارند).
R oom – چقدر فضا در اطراف جسم وجود دارد؟ این سوال دوباره به دید مربوط می شود. مقدار فضای اطراف جسم تعیین می کند که آیا پروژه حتی امکان پذیر است یا خیر، و اگر چنین است، تا حدودی تعداد عکس هایی را که می گیرید تعیین می کند. به یاد داشته باشید که برای لنزهای استاندارد با زاویه متوسط که دارای V-STARS هستند، قاعده کلی این است که شما تقریباً به اندازه فاصلهی عقب خود از جسم، شیء را خواهید دید. به عنوان مثال، اگر شما 3 متر از جسم فاصله دارید، می توانید حدود 3 متر از جسم را ببینید. اگر فضای کافی برای دیدن کل شی در عکس وجود ندارد، همچنان میتوانید با عکسبرداری از آن در بخشهای روی همپوشانی، آن را اندازهگیری کنید (این تکنیک موزاییک نامیده میشود) اما این کار اندازهگیری را پیچیدهتر میکند.
S cale – آیا از ترازو استفاده می شود؟ اگر چنین است، چگونه بر روی شی اعمال می شود؟ اگرچه این ممکن است در ابتدا کمی پیش پاافتاده به نظر برسد، اما فهمیدن اینکه نوار(های) مقیاس را کجا قرار دهید تا اهداف را مسدود نکنند یا خودشان مسدود شوند، می تواند یکی از چالش برانگیزترین جنبه های اندازه گیری باشد. به این واقعیت اضافه کنید که مطلوب است که نوار مقیاس به اندازه طول جسمی باشد که اندازه میگیرید، و باید به طور محکم به جسم متصل شود، و اگر مقیاس مهم است، توصیه میکنیم از فواصل مقیاس چندگانه استفاده کنید. این کار به ظاهر پیش پا افتاده گاهی اوقات می تواند کاملاً دلهره آور باشد. به مقیاس فتوگرامتری و سؤالات مقیاس در پیوست A مراجعه کنید.
تعریف یک سیستم مختصات
همه سیستم های اندازه گیری مختصات باید از یک سیستم مختصات کار استفاده کنند. V-STARS به طور خودکار یک سیستم مختصات محلی را تعریف می کند که از سیستم مختصات تعریف شده توسط اولین تصویری که اندازه گیری می کنید استفاده می کند. اگر از AutoBar استفاده شود، اندازه گیری V-STARS در سیستم مختصاتی است که توسط AutoBar تعریف شده است. این در تصویر مجاور نشان داده شده است. اگر از نوار خودکار استفاده نمی شود، V-STARS از سیستم مختصات روی فایل درایوری که انتخاب کرده اید استفاده می کند. در هر صورت، تمام تصاویر و اندازهگیریها در سیستم مختصات محلی تعریف میشوند. به طور معمول، این سیستم محلی معمولاً سیستم مختصات نهایی مورد نظر کاربر نیست.
طرح شما باید شامل راهی برای تعریف سیستم مختصات کاربر مورد نظر شما باشد. در برخی موارد، سیستم مختصات محلی تعریف شده توسط V-STARS کافی است. در موارد دیگر، شما باید این سیستم محلی را به سیستم مختصات کاربر مورد نظر تبدیل کنید. این تبدیل را می توان به طور خودکار توسط V-STARS با استفاده از داده های طراحی برای شما انجام داد، یا می توانید از برنامه WINTRANS ارائه شده با V-STARS استفاده کنید.
اغلب، سیستم مختصات کاربر توسط زیر مجموعه ای از نقاط اندازه گیری شده که مختصاتی در سیستم مختصات مورد نظر کاربر دارند، تعریف می شود. این نقاط ممکن است شامل اهداف ابزار دقیق ساخته شده باشند که در سوراخ های بوش قرار دارند، یا ممکن است با ویژگی هایی بر روی جسم اندازه گیری شده (مانند لبه های قسمتی، یا محل سوراخ ها یا تقاطع خطوط، هواپیماها و غیره) مشخص شوند که در آنها هدف قرار می گیرند. به نوعی در هر صورت، مهم است که نقاطی که سیستم مختصات تعریف شده توسط کاربر را نشان میدهند، دقیقاً هدف قرار گیرند وگرنه دقت تبدیل کاهش مییابد. در واقع، دقت قرار دادن اهداف دقیقاً بر روی ویژگیهای تعیینکننده سیستم مختصات کاربر، اغلب عامل تعیینکننده در دقت اندازهگیری کلی است. خوشبختانه، انواع مختلف هدف برای کمک به این امر در دسترس هستند.
سیستم های مختصات نیز سیستم های محوری نامیده می شوند زیرا سیستم مختصات اغلب با تراز کردن نقاط خاصی با محورهای مختصات تعریف می شود. در این سند، سیستم مختصات و سیستم محوری به صورت مترادف به کار رفته اند و به معنای یکسان هستند.
انواع اندازه گیری ها
فتوگرامتری یک فناوری اندازه گیری همه کاره، قدرتمند و انعطاف پذیر است. اندازهگیریها در خشکی، دریا (و زیر دریا) و هوا، و حتی در فضای بیرونی بر روی اجسام کوچکتر از یک فوتبال تا بزرگتر از یک زمین فوتبال انجام شده است.
فتوگرامتری به طور گسترده در صنایع هوافضا، آنتن سازی، کشتی سازی، ساخت و ساز و خودروسازی برای طیف گسترده ای از وظایف اندازه گیری استفاده می شود. اگرچه هر پروژه فتوگرامتری تا حدودی متفاوت است، ما آنها را به دسته های وسیعی تقسیم کرده ایم تا به توصیف رویکردهای کلی برای انجام یک اندازه گیری موفق کمک کنیم.
اندازهگیریها را میتوان بهعنوان اولیه یا تکراری، و بهعنوان کاملاً همپوشانی یا تا حدی همپوشانی طبقهبندی کرد. این دو مقوله متقابل نیستند. اندازهگیریهای اولیه میتوانند کاملاً همپوشانی یا تا حدی همپوشانی داشته باشند، و همینطور اندازهگیریها تکرار میشوند. به طور کلی، اندازه گیری کاملاً همپوشانی و تکراری ساده ترین نوع اندازه گیری است در حالی که اندازه گیری اولیه و تا حدی همپوشانی دشوارترین نوع اندازه گیری است.
اندازه گیری های اولیه و تکراری
یک اندازه گیری تکراری اندازه گیری است که در آن مختصات تقریبی برای همه (یا تقریباً همه) نقاط هدف در دسترس است، در حالی که برای اندازه گیری اولیه هیچ مختصات تقریبی در دسترس نیست. به طور کلی، این مختصات از یک اندازه گیری قبلی شی در دسترس هستند (از این رو اندازه گیری تکرار نامیده می شود)، اما می توانند از مجموعه ای از مختصات طراحی نیز باشند. تنها چیزی که مهم است این است که آنها به اندازه کافی دقیق هستند تا به نرم افزار اجازه دهند تا تمام اهداف روی هر عکس را به درستی اندازه گیری کند. سپس، پس از جهتدهی هر عکس (با استفاده از رویه AutoStart یا SuperStart)، میتوانیم از فرآیندی به نام driveback برای یافتن و اندازهگیری سریع و خودکار تمام نقاط قابل مشاهده استفاده کنیم. برای استفاده از درایو بک، مختصات باید بسیار دقیق تر از نزدیک ترین فاصله هدف باشد. بنابراین، اگر اهداف 100 میلی متر (4 اینچ) از هم فاصله داشته باشند، دقت مختصات باید بسیار بهتر از این باشد، مثلاً بهتر از 25 میلی متر (1 اینچ). هرچه تقریب ها بهتر باشد، اندازه گیری سریع تر و آسان تر خواهد بود.
اگر مختصات تقریبی در دسترس نیست، میتوانید از نوار خودکار ارائه شده با سیستم برای انجام اندازهگیری اولیه استفاده کنید. با دستور AutoMeasure، اندازهگیریهای اولیه اکنون تقریباً به اندازه اندازهگیریهای تکراری سریع و آسان هستند.
اندازه گیری هایی با همپوشانی کامل یا جزئی
اندازهگیری کاملاً همپوشانی اندازهگیری است که در آن کل شی در هر عکس دیده میشود، در حالی که در اندازهگیری با همپوشانی نسبی، از جسم باید به صورت برشهایی عکسبرداری شود (به دلیل محدودیت فضا یا نیاز به دقت یا به دلیل پیچیدگی جسم). اندازهگیریهای با همپوشانی جزئی باید دارای پوشش مشترک کافی برای نگهداشتن (یا “پیوند”) کل اندازهگیری به عنوان یک کل واحد باشند. نیاز به پوشش مشترک بین عکس ها با کمک شکل های زیر شرح داده شده است.
در شکل اول دو اندازه گیری کاملا مستقل از دو صفحه تخت داریم. هر یک از پانل ها بسیار دقیق اندازه گیری می شوند، اما از آنجایی که هیچ پوشش مشترکی وجود ندارد، نمی توانیم چیزی در مورد رابطه بین دو پانل بگوییم.
به عنوان مثال، ما حتی نمی توانیم بگوییم که پانل ها چقدر از یکدیگر فاصله دارند یا اینکه چگونه به سمت یکدیگر قرار گرفته اند.
اگر اکنون پانل ها را با همپوشانی جزئی به اندازه کافی اندازه بگیریم که خطی از نقاط مشترک بین دو پانل دیده شود، اکنون دو پانل را به هم متصل کرده ایم اما نه با همپوشانی کافی برای تعیین کامل رابطه بین دو پانل.
خط مشترک فقط مانند یک لولا عمل می کند، دو پانل در آنجا به هم متصل هستند، اما می توانند در هر زاویه ای که این اتصال “لولا” اجازه می دهد، به یکدیگر متصل شوند. بنابراین، همپوشانی باید بیش از یک خط از نقاط باشد. باید حداقل دو بعدی باشد.
اگر اکنون یک نقطه مشترک سوم بین دو اندازه گیری را اضافه کنیم که از خط فاصله دارد (بنابراین سه نقطه یک مثلث را تشکیل می دهند)، “لولا” اکنون در جای خود قفل شده و رابطه بین دو پانل برقرار می شود. بنابراین، حداقل باید سه نقطه وجود داشته باشد که یک مثلث را تشکیل می دهد که بین دو مجموعه عکاسی مشترک دیده می شود.
البته با افزودن نقاط بیشتر و همپوشانی بیشتر، پیوند بین دو پنل قویتر برقرار میشود. قوی ترین پیوند بین دو پانل زمانی ایجاد می شود که همه تصاویر همه هر دو پانل را ببینند. و ما دوباره به نوع اندازه گیری کاملاً همپوشانی بازگشته ایم.
برنامه ریزی برای انواع مختلف اندازه گیری
بسته به نوع اندازه گیری می توان دستورالعمل های کلی ارائه داد. به طور کلی، اینکه یک پروژه یک اندازه گیری کاملاً یا تا حدی همپوشانی دارد، تعداد و مکان تصاویر را تعیین می کند. این بخش از برنامه ریزی را طراحی اندازه گیری می نامند. از سوی دیگر، این که یک پروژه یک اندازه گیری اولیه یا تکراری باشد، معمولاً تأثیری بر طراحی اندازه گیری ندارد، اما در عوض روشی را که معمولاً برای اجرای طرح به کارآمدترین روش دنبال می شود، تعیین می کند.
ما ابتدا طراحی را برای اندازهگیریهای کاملاً همپوشانی مورد بحث قرار میدهیم، زیرا اینها سادهترین نوع اندازهگیریها هستند، و سپس طراحی را برای اندازهگیریهای نیمه همپوشانی که پیچیدهتر هستند، مورد بحث قرار میدهیم. پس از این، رویه های کلی برای انواع مختلف اندازه گیری ها را مورد بحث قرار می دهیم.
طراحی برای اندازه گیری های کاملاً همپوشانی
همانطور که در املاک و مستغلات، سه ملاحظات اصلی برای اندازه گیری های کاملاً همپوشانی، مکان، مکان و مکان است. از آنجایی که هر عکسی کل شی را می بیند، محل قرارگیری دوربین معمولا دغدغه اصلی است. برای بالاترین دقت، عکسها باید از مکانهای مختلف گرفته شوند که زوایای تقاطع خوبی با نقاط روی جسم ایجاد میکنند. (برای توضیح چگونگی تأثیر تعداد عکس ها و هندسه بر دقت اندازه گیری، به دقت اندازه گیری مراجعه کنید). با این حال، اغلب مکان های دوربین توسط اتاق اطراف شی و/یا شکل شی محدود می شود. اهداف بازتابی معمولاً مکانهای دوربین را نیز محدود میکنند، زیرا اهداف بازتابی را نمیتوان خیلی مایل مشاهده کرد یا تاریک و غیرقابل اندازهگیری میشوند.
ملاحظات اصلی برای طراحی اندازه گیری های همپوشانی عبارتند از:
1. سعی کنید همه اهداف را از چهار یا چند مکان مختلف ببینید (برای دقت و اطمینان خوب).
2. سعی کنید زاویه تقاطع دوربین را بین 60 تا 120 درجه نگه دارید (برای دقت خوب)
3. سعی کنید زاویه را نسبت به اهداف بازتابی کمتر از 60 درجه نگه دارید (برای تصاویر هدف خوب و روشن).
برای کمک به نشان دادن طرح برای اندازه گیری کاملاً همپوشانی، اندازه یک صفحه سطح گرانیتی مسطح 2 متری در 1 متری را با اهداف بازتابنده روی سطح آن در نظر بگیرید. دوربین دارای یک لنز میدان دید با زاویه متوسط است، بنابراین برای دیدن کل جسم باید حدود 2 متر بالاتر از صفحه سطح قرار بگیریم. سوال کلیدی این است که چه تعداد عکس بگیریم و دقت بالا را از کجا بگیریم؟ برای شروع، اجازه دهید دو عکس گرفته شده در دو طرف صفحه را در نظر بگیریم.
وقتی دوربین ها را از هم دورتر می کنیم، دو اتفاق می افتد. اول، زوایای تقاطع بین دو دوربین بزرگتر میشود که خوب است زیرا به بهبود دقت کمک میکند، اما همچنین زاویه نسبت به اهداف بازتابی نیز بزرگتر میشود که در نهایت بد است زیرا اهداف در نهایت برای اندازهگیری بسیار کمرنگ میشوند.
به عنوان یک قاعده کلی، یک مصالحه خوب بین کیفیت زوایای تقاطع و کیفیت تصویر هدف با مکان یابی دوربین به دست می آید تا زاویه 45 درجه با مرکز جسم ایجاد کند. این همچنین زاویه را نسبت به اهداف بازتابی که در دورترین فاصله از دوربین قرار دارند کمتر از حد 60 درجه نگه می دارد. یک چیز خوب در مورد استفاده از زاویه تقریباً 45 درجه نسبت به مرکز جسم این است که مکان دوربین به راحتی قابل تشخیص است. در 45 درجه، فاصله از مرکز جسم برابر است با فاصله عقب از جسم. اکنون میتوانیم تصاویر بیشتری را در اطراف جسم به دلخواه برای افزایش دقت اضافه کنیم.
گاهی اوقات میتوانیم با استفاده از اهداف ویژه به جای اهداف معمولی و مسطح، بر محدودیتهای ناشی از زاویه دید بازتابی غلبه کنیم. به عنوان مثال، میتوان از اهداف زاویهدار در لبه صفحه به جای اهداف مسطح استفاده کرد تا زاویه دید مطلوبتر شود. همچنین، چندین تولیدکننده، اهداف بازتابنده “ابزار” را می سازند که از هدفی تشکیل شده است که می تواند در یک بوش دقیق قرار داده شود و تا بهترین زاویه دید بچرخد. البته، در هر دو مورد، برای اندازه گیری سطح خود، باید فاصله از مرکز هدف تا صفحه سطح حذف شود.
شکل جسم نیز روی مکان های دوربین تاثیر دارد. به عنوان مثال، اگر جسم مسطح نبود، بلکه مقعر بود (مثلاً سطح بازتابنده یک آنتن سهموی)، اهداف انعکاسی به عقب در لبه دور جسم به شکل مطلوب تری به سمت دوربین و اکنون زوایای تقاطع دوربین قرار می گیرند. برای به دست آوردن دقت بیشتر می تواند بزرگتر باشد.
برعکس، اگر جسم محدب بود (به عنوان مثال، سطح پشتی آنتن)، زوایای تقاطع دوربین باید کوچکتر باشد تا اهداف بازتابی در لبه ها قابل تصویربرداری باشند. در واقع، بسته به انحنای سطح، زوایای تقاطع دوربین ممکن است به شدت به خطر بیفتد، که بهتر است اندازهگیری را طوری طراحی کنیم که جسم با همپوشانی جزئی اندازهگیری شود.
علاوه بر این، برنامه شما باید انسداد را در نظر بگیرد. به یاد داشته باشید، ما می خواهیم سعی کنیم همه اهداف را از حداقل چهار مکان مختلف ببینیم. اگر قسمتی از جسم دیده نمی شود (به عنوان مثال، تغذیه آنتن ممکن است بخشی از سطح را مسدود کند)، سعی کنید از مکان های دیگری که اهداف مسدود شده را می بینند، عکس های اضافی بگیرید. با این حال، اگر انسداد شدید باشد، اغلب به دست آوردن هندسه خوب دشوار است. (یک مثال خوب برای این کار، تلاش برای اندازه گیری اهداف در پایین یک استوانه بلند و نازک است.) اگر انسداد یا سایر محدودیت ها تعداد نماهای مطلوبی را که می توانیم از جسم یا بخشی از جسم دریافت کنیم، محدود می کند، می توانیم دقت را افزایش دهیم. تا حدودی (معمولاً 10-20٪) با گرفتن عکس دیگری از همان مکان. میتوانید دقت را بیشتر کنید (معمولاً 10-20٪ دیگر) با گرفتن عکسها با دوربینی که در زاویهای متفاوت برای هر عکس قرار گرفته است.
طراحی برای اندازهگیریهای همپوشانی جزئی
برای اندازهگیریهایی که تا حدی همپوشانی دارند، باید همه چیزهایی را که در برنامهریزی برای اندازهگیریهای کاملاً همپوشانی لازم است در نظر بگیرید. با این حال، شما همچنین باید اندازه گیری را طوری طراحی کنید که به اندازه کافی همپوشانی وجود داشته باشد تا کل اندازه گیری به اندازه کافی به هم متصل شود تا دقت اندازه گیری حفظ شود. (برای توضیح اینکه چرا به همپوشانی نیاز است و الزامات اتصال یک اندازه گیری به یکدیگر، به اندازه گیری های کاملاً یا جزئی همپوشانی مراجعه کنید). همچنین، این واقعیت که کل شی را نمی توان در هر عکس مشاهده کرد، معمولاً به این معنی است که عکس های بیشتری نسبت به اندازه گیری های کاملاً همپوشانی مورد نیاز است. در نهایت، از آنجایی که تنها بخشی از جسم دیده می شود، به راحتی می توان مسیری را که در آن قرار دارید و نقاطی را که اندازه می گیرید، از دست داد.
اندازه گیری های تا حدی همپوشانی می تواند در ابتدا پیچیده به نظر برسد، بنابراین توصیه می کنیم با یک استراتژی “تفرقه و غلبه” برای اندازه گیری شروع کنید. ابتدا شی را به چندین ناحیه منطقی (چپ، راست، جلو، عقب و غیره) تقسیم کنید که هر کدام با مجموعه ای از تصاویر کاملاً قابل مشاهده باشند. سپس، عکسهای اضافی (یا اهداف) اضافه کنید تا مناطق مجزا به شدت به هم متصل شوند. اغلب، خواهید دید که به اندازه کافی همپوشانی جزئی بین اندازهگیریهای “جدا” وجود دارد که تعداد کمی از عکسهای اضافی مورد نیاز است. برای کمک به درک این فرآیند، استراتژیهای طراحی را در زیر برای برخی از انواع معمول اندازهگیریهای نیمه همپوشانی توضیح میدهیم. با این حال، هیچ جایگزینی برای تجربه وجود ندارد، بنابراین دست به کار شوید و شروع کنید!
طراحی برای اندازه گیری های “چپ-راست”.
اغلب، یک شی نسبتا ساده که می تواند با همپوشانی کامل اندازه گیری شود، باید با همپوشانی جزئی اندازه گیری شود، زیرا فضای کافی در اطراف جسم برای مشاهده کل شی در هر عکس وجود ندارد. (همچنین ممکن است این کار را برای افزایش دقت انجام دهید. برای جزئیات بیشتر در مورد این تکنیک به اندازه گیری دقت و “چقدر دقیق V-STARS است؟” در پیوست A مراجعه کنید).
به عنوان مثال، یک اتاق مستطیل شکل را در نظر بگیرید. برای اندازهگیری یکی از دیوارهای بلند اتاق، باید به دیوار بلند دیگر برگردید، اما مستطیل شکل بودن اتاق به شما اجازه نمیدهد به اندازه کافی به عقب برگردید تا کل دیوار را ببینید. در این مورد، میتوانید شی را به قسمتهایی تقسیم کنید و از تکنیکهای توضیح داده شده در Design for Completely Overlapping Measurements استفاده کنید تا مطمئن شوید اندازهگیری دقیقی برای هر ناحیه طراحی کردهاید. در این مثال، دیوار را به دو نیمه چپ و راست تقسیم کرده ایم و تقریباً از چهار گوشه هر نیمه عکس گرفته ایم. بنابراین، هر نیمه در چهار عکس از چهار مکان مختلف دیده می شود. این تا اینجا خوب است، اما توجه داشته باشید که هیچ پوشش مشترکی بین دو نیمه وجود ندارد، بنابراین کل اندازه گیری متصل نیست. (در عمل،
چند راه مختلف برای اتصال نیمه ها به یکدیگر وجود دارد. ابتدا، میتوانیم عکسهای بیشتری در وسط بگیریم که درست در مرکز دیوار هستند. به عنوان مثال، می توانیم دو عکس در مرکز دیوار بگیریم. یکی در بالا و یکی در پایین. این عکسها بخشی از نیمههای چپ و راست را میبینند و همه چیز را به هم متصل میکنند. این روش اول خوب است و انجام آن آسان است زیرا مجبور نیستید دوربین را به موقعیت جدیدی منتقل کنید.
با این حال، رویکرد دیگر این است که دیوار را بیشتر به یک نیمه “وسط” تقسیم کنید و در چهار گوشه این منطقه شلیک کنید. از آنجایی که این ناحیه اکنون بخشی از نیمه چپ و راست را می بیند، اکنون کل اندازه گیری به هم متصل شده است. اگرچه این روش کمی سخت تر از روش قبلی است زیرا باید دوربین را به این موقعیت های جدید منتقل کنید، اما این رویکرد به دلیل تنوع هندسی بیشتر تا حدودی دقیق تر است. روش استفاده بستگی به الزامات دارد. اگر سرعت ضروری است، از رویکرد اول استفاده کنید. اگر دقت نگرانی اصلی است، از رویکرد دوم استفاده کنید. البته اگر دیوار نیاز به تیراندازی بیش از دو بخش داشته باشد، این تکنیک ها قابل گسترش هستند.
طراحی برای اندازه گیری های “جلو-پشت”.
موقعیت اندازه گیری که در این بخش توضیح داده شده است، اغلب اتفاق نمی افتد، اما به نشان دادن نیاز به همپوشانی و نحوه انجام آن در یک موقعیت بسیار دشوار کمک می کند. اگر تا به حال با موقعیت مشابهی روبرو شدید، آن را در نظر داشته باشید. وظیفه اندازه گیری جلو و پشت یک پانل نازک است. فضای زیادی در اطراف پانل وجود دارد، بنابراین می توانیم هر طرف پانل را با همپوشانی کامل اندازه گیری کنیم. با این حال، مشکل زمانی پیش میآید که سعی میکنیم جلو و عقب را به هم وصل کنیم. (اگر مشترکاتی بین دو طرف نداشته باشیم نمی توانیم در مورد رابطه جلو و عقب مثلاً ضخامت پانل چیزی بگوییم). اکنون باید اهدافی را در جایی بچسبانیم که هم در عکس های جلو و هم از پشت آن دیده می شود.
معمولاً هشت تا دوازده هدف با توزیع مناسب تمام چیزی است که برای ایجاد پیوند قوی بین جلو و عقب لازم است.
یکی از راه حل های ممکن این است که اهدافی را روی وسیله نگهدارنده پانل یا روی زمین اطراف پانل قرار دهید که از هر دو طرف قابل مشاهده باشد. با این حال، اگر پانل به طور سفت و سخت به پایه نگهدارنده یا کف متصل نباشد، نمی توانیم این کار را انجام دهیم زیرا این نقاط اتصال باید نسبت به پانل پایدار باشند. همچنین، نواحی قابل مشاهده روی زمین یا فیکسچر ممکن است اجازه توزیع خیلی خوب نقاط اتصال را ندهند. به یاد داشته باشید، فقط یک خط از نقاط مشترک کافی نیست.
روش دیگر قرار دادن اهداف در لبه یا بالای پانل است که از هر دو طرف قابل مشاهده است. با این حال، این مشکلاتی را به همراه دارد. اگر پانل خیلی نازک باشد، نمیتوانیم اهداف معمولی خود چسب را روی لبه قرار دهیم، مگر اینکه آنها را روی یک حامل سخت نصب کنیم که میتوان آن را به لبه وصل کرد. اگر پانل فولادی باشد، حامل سخت می تواند مغناطیسی باشد. اگر اینطور نیست، می توان از چسب استفاده کرد. حتی اگر بتوان اهداف خودچسب را روی لبهها قرار داد، دیدن آنها همچنان میتواند دشوار باشد زیرا اکنون به سمت جلو و عقب عمود هستند. یک راه حل این است که به اصطلاح “هدف های پشت سر هم” را روی لبه هایی قرار دهید که از حاملی تشکیل شده است که به لبه متصل می شود بنابراین هدف اکنون موازی با صفحه پانل است. سپس، هدف شامل دو هدف خودچسب است که پشت به پشت قرار گرفته اند، بنابراین هدف از هر دو طرف بازتابی دارد. هدف پشت به پشت در حامل نصب شده است بنابراین صلب است و اکنون هدف از هر دو طرف قابل مشاهده است. با این حال، از آنجایی که پشت و جلوی هدف یک نقطه نیستند (آنها با ضخامت دو سطح هدف که حدود 0.2 میلی متر یا 0.008 اینچ است از هم جدا می شوند) در مواقعی که به دقت بالا نیاز است از این روش استفاده نکنید.
یک رویکرد بهتر برای استفاده در مواقعی که به دقت بالا نیاز است، استفاده از به اصطلاح “هدف های قابل چرخش” است. این حاملهای هدف دقیقاً ساخته شدهاند که برای نصب در یک بوش دقیق طراحی شدهاند تا بتوان آنها را چرخاند. هدف طوری ساخته شده است که مرکز هدف در مرکز چرخش حامل هدف قرار گیرد. بوشینگ ها را می توان به لبه های پانل متصل کرد و سپس اهداف با زاویه راست را در بوشینگ ها قرار داد. سپس اهداف را می توان چرخاند تا موازی با چهره ای که از آن عکس گرفته می شود قرار گیرند. از آنجایی که هدف هنگام چرخش مکان یکسانی را حفظ می کند (در محدوده +/- 12 میکرون یا 0.0005 اینچ)، اهداف به عنوان نقاط پیوند خوبی عمل می کنند.
طراحی برای اندازه گیری “جعبه”.
یک موقعیت معمولی که نیاز به اندازه گیری تا حدی همپوشانی دارد، زمانی رخ می دهد که شما باید جسمی را که چندین ضلع دارد اندازه گیری کنید. معمولاً تمام اضلاع جسم را نمی توان در هر عکسی دید یا حداقل از مکان های مختلف به اندازه کافی برای اندازه گیری دقیق قابل مشاهده نیست. یک مثال کلی خوب برای این کار، اندازه گیری هر چهار طرف (و گاهی اوقات بالا و/یا پایین) ساختار جعبه ای شکل است.
رویکرد این است که ابتدا روی هر طرف جعبه تمرکز کنید و آن را به عنوان یک اندازه گیری کاملاً همپوشانی در نظر بگیرید. اگر دو طرف جعبه خیلی بزرگ است که به طور کامل دیده نمی شود، پس باید ابتدا روی هر طرف جعبه تمرکز کنید. (برای چگونگی اندازهگیری یک طرف جعبه با همپوشانی جزئی، به طراحی اندازهگیریهای “چپ-راست” مراجعه کنید). بعد از اینکه طراحی خوبی برای هر طرف داشتید، میتوانیم تلاش خود را به گره زدن همه طرفها معطوف کنیم. یک طراحی معمولی گرفتن عکس هایی است که از هر گوشه جعبه قرار دارند. در برخی موارد، یک عکس از هر گوشه قادر خواهد بود دو ضلع کامل جعبه را ببیند و در این صورت، کراوات به راحتی برقرار می شود. در موارد دیگر، ممکن است عکس ها نتوانند هر دو طرف را به طور کامل ببینند (بسته به انسداد، اندازه جعبه، میدان دید دوربین و هدف گیری)، و عکسهای اضافی باید گرفته شود (شاید عکسهای پایین و بلند در مرکز هر طرف). در صورت تمایل، میتوانید با چرخاندن 90 درجه بین عکسها، در هر مکان دو عکس بگیرید. این باعث افزایش دقت می شود. نکته کلیدی این است که سعی کنید حداقل در چهار عکس مختلف همه نقاط را داشته باشید و بین تمام مناطق جداگانه ارتباط قوی برقرار کنید.
حتی اگر بالای جعبه را اندازه نمیگیرید، ممکن است اضافه کردن اهداف در اینجا بسیار مفید باشد، زیرا ممکن است از مکانهای مختلف اطراف جعبه به خوبی دیده شوند. این همه عکس ها را به شدت به هم گره می زند. با این حال، یکی از مشکلات این است که شما ممکن است در دیدن اهداف صاف قرار گرفته در سطح بالایی مشکل داشته باشید. در این مورد، استفاده مجدد از اهداف قابل چرخش و زاویه راست برای شما مفید خواهد بود. آنها را در بوش هایی که به سطح بالایی متصل می شوند قرار می دهند. سپس میتوانید هنگام دور زدن جعبه، آنها را به سمت دوربین بچرخانید.
رویه ها برای انواع مختلف اندازه گیری
ما به طور کلی اندازه گیری ها را به عنوان یکی از چهار نوع طبقه بندی می کنیم. اندازهگیریها میتوانند اولیه یا تکرار شوند و میتوانند به طور کامل یا جزئی همپوشانی داشته باشند. این دو دسته متقابل نیستند، بنابراین می توانیم چهار نوع مختلف اندازه گیری داشته باشیم.
اینها هستند:
1. تکرار، کاملاً همپوشانی (معمولاً سادهترین نوع اندازهگیری)
2. تکرار، تا حدی همپوشانی دارند
3. اولیه، کاملاً همپوشانی دارند
4. اولیه، تا حدی همپوشانی (به طور کلی سختترین نوع اندازهگیری)
اگرچه همه این انواع مختلف اندازه گیری ها مشترکات زیادی دارند، اما تفاوت هایی نیز وجود دارد. اولاً، نوار خودکار برای اندازهگیریهای اولیه مورد نیاز است و معمولاً برای اندازهگیریهای تکراری مورد نیاز نیست. اهداف کدگذاری شده معمولاً در هر دو اندازه گیری اولیه و تکراری استفاده می شوند، بنابراین می توانید اندازه گیری را کاملاً خودکار کنید. آموزش های V-STARS نشان می دهد که چگونه از AutoBar و اهداف کد شده در اندازه گیری های اولیه و تکراری استفاده می شود. اگر از نوار خودکار در اندازهگیری تکراری استفاده میکنید، باید در همان مکانی که در اندازهگیری اولیه بود قرار داده شود. اگر AutoBar به جسم متصل باشد، معمولاً مشکلی وجود ندارد، اما اگر AutoBar حذف شد، باید دوباره در موقعیت اصلی خود قرار گیرد. غالباً می توان از نوعی فیکسچر تراز برای کمک به انجام این کار استفاده کرد.
اگر مقیاس بندی خوب جسم مورد نیاز باشد، معمولاً در اندازهگیریهای اولیه، نوار (های) مقیاس مورد نیاز است (پیوست A در مورد مقیاس و استفاده از آن را ببینید). ممکن است در اندازه گیری های تکراری نیازی به نوارهای مقیاس نباشد. اگر برخی از نقاط روی جسم از اندازه گیری به اندازه گیری حرکت نکنند (نقاط روی یک قاب ثابت که جسم را نگه می دارد)، می توانند به عنوان نقاط مقیاس استفاده شوند. اگر از میلههای مقیاس استفاده میشود، اگر بتوانید آنها را تقریباً در همان مکان قبلی بر روی جسم قرار دهید مفید است، اما این ضروری نیست.
نکات برنامه ریزی نهایی
در اجسام پیچیده با نقاط زیاد، به راحتی می توان مسیری را که در آن قرار دارید و نقاطی را که اندازه می گیرید از دست داد. میتوانید با برچسبگذاری یا شناسایی برخی از نکات کلیدی روی شی، کار را آسانتر کنید. مواد برچسبگذاری بازتابنده برای کمک به این کار در دسترس هستند. گرفتن عکس ها در یک الگوی منظم و مرتب در صورت امکان و نگه داشتن گزارشی از تصاویر نیز می تواند به ثابت نگه داشتن همه چیز در پروژه های پیچیده کمک کند.
اگرچه در این توضیح دستورالعمل های کلی برای انواع مختلف اندازه گیری ها ارائه کرده ایم، اما هیچ جایگزینی برای تجربه وجود ندارد. سعی کنید با اندازه گیری های ساده کاملاً همپوشانی شروع کنید و سپس اندازه گیری اشیاء نسبتاً ساده را انجام دهید که به همپوشانی زیاد یا عکس های زیاد نیاز ندارند. در نهایت، می توانید اندازه گیری اشیاء پیچیده تر را امتحان کنید. فراموش نکنید که از آموزش های V-STARS برای کمک به یادگیری و درک خود استفاده کنید.
خلاصه برنامه ریزی و چک لیست
چک لیست زیر را برای کمک به برنامه ریزی پروژه آماده کرده ایم. ما اکیداً توصیه می کنیم از آن در هر پروژه ای استفاده کنید تا زمانی که آن را به طور کامل بدانید. شما حتی باید به آن اضافه کنید یا آن را مطابق با نیاز خود تغییر دهید.
بررسی های برنامه ریزی V-STARS:
1. الزامات مثلث بندی
الف. به دو مشاهده مختلف از هر نقطه نیاز دارید (حداقل چهار مورد را ترجیح دهید).
ب به زوایای تقاطع خوب بین نقاط نیاز دارید (60-120 درجه خوب است). 2. الزامات برداشتن
الف. نیاز به مشاهده نوار خودکار یا 4 نقطه شناخته شده در هر تصویر (نقاط نمی توانند در یک خط باشند).
ب به حداقل 12 نقطه خوب در هر عکس نیاز دارید (اما بیست بهتر است). 3. الزامات خود کالیبراسیون
الف. باید دوربین را 90 درجه بچرخانید (حداقل یک بار، بیشتر بهتر است).
ب حداقل به چهار تا شش عکس نیاز دارید (چهار اگر مسطح نباشد، شش عکس اگر مسطح نباشد).
ج به عکس از حداقل سه مکان مختلف نیاز دارید.
د در کل اندازه گیری به حداقل بیست نقطه با توزیع مناسب نیاز دارید (اما چهل نقطه بهتر است). 4. الزامات همپوشانی (فقط در صورتی لازم است که کل شی به یکباره دیده نشود)
a. حداقل به سه نقطه مشترک برای بخش های مجاور نیاز دارید (اما بیشتر بهتر است).
ب نقاط مشترک نمی توانند در یک خط (مثلث یا بهتر) باشند. 5. الزامات مقیاس (فقط در صورت نیاز به مقیاس بندی دقیق مورد نیاز است)
a. حداقل یک فاصله شناخته شده در دسترس (ترجیح حداقل سه)
ب. فاصله مقیاس به اندازه عملی است
اهداف بازتاب دهنده و ویژگی های آنها
سیستم V-STARS اهداف ویژه ای را اندازه گیری می کند که از یک ماده بازتابنده نازک (0.11 میلی متر/ 0.0044 اینچ ضخامت)، صاف و خاکستری رنگ ساخته شده است.
بازتابنده های رترو بازتاب نور را بسیار کارآمد به منبع نور منعکس می کنند. به عنوان مثال، آنها معمولاً 100 تا 1000 برابر در برگشت نور کارآمدتر از یک هدف سفید معمولی هستند. (مواد انعکاسی به عقب مورد استفاده برای اهداف در اصل و عملکرد مشابه بازتابنده های بزرگراه است اما بسیار کارآمدتر است.)
برای روشن کردن اهداف از یک فلاش کم مصرف واقع در دوربین استفاده می شود. تصاویر هدف به دست آمده بسیار روشن هستند و یافتن و اندازه گیری آنها آسان است. علاوه بر این، به دلیل اینکه اهداف به طور کامل توسط فلاش روشن می شوند، نوردهی هدف مستقل از روشنایی محیط است. عکس ها را می توان در نور روشن یا تاریکی مطلق گرفت و نوردهی هدف یکسان خواهد بود. این ویژگی نوردهی هدف را بسیار آسان می کند. برای جزئیات بیشتر درمورد قرار گرفتن در معرض اهداف بازتابنده به بخش هدف قرار گرفتن مراجعه کنید
علاوه بر این، قدرت بارق به اندازه ای کم است که بارق به طور معمول به طور قابل توجهی جسم را روشن نمی کند. بنابراین، قرار گرفتن در معرض هدف و شی تا حد زیادی با نوردهی هدف ارائه شده توسط بارق، و قرار گرفتن در معرض اشیا توسط نور محیط مستقل هستند. با تنظیم مناسب زمان نوردهی شاتر، می توانید جسم را در هر سطحی که می خواهید در معرض دید قرار دهید. میتوانید نوردهی معمولی داشته باشید، اما معمولاً میخواهید که جسم را به میزان قابل توجهی کم نور کنید تا اندازهگیری هدف آسانتر و قابل اطمینانتر شود. سپس، میتوانید از ویژگیهای بهبود موجود در V-STARS برای بهبود شی استفاده کنید. برای جزئیات بیشتر در مورد نوردهی پسزمینه، بخش نوردهی پسزمینه را ببینید.
زاویه هدف
اگر چه اهداف بازتابی دارای مزایای متعددی نسبت به اهداف معمولی هستند، اما زمانی که در زوایای تند مشاهده میشوند، ویژگیهای انعکاسی خاص خود را از دست میدهند و تاریک و غیرقابل اندازهگیری میشوند. برای بهترین نتایج، اهداف را نباید بیش از 60 تا 65 درجه خارج از محور مشاهده کرد.
ضخامت هدف
در برخی از اندازهگیریها، ممکن است لازم باشد ضخامت هدف حذف شود تا مکان نقطه مورد نظر به دست آید. اهداف بازتابی از نظر فیزیکی 100 میکرون (0.004 اینچ) ضخامت دارند اما آنچه واقعاً اهمیت دارد ضخامت نوری است. ضخامت نوری به این بستگی دارد که آیا هدف پوشانده شده باشد (دارای پسزمینه سیاه در اطراف مواد بازتابنده است) یا بدون ماسک (بدون پسزمینه). اهداف نقابدار دارای ضخامت نوری 110 میکرون (0.0044 اینچ) و اهداف بدون ماسک دارای ضخامت نوری 63 میکرون (0.0025 اینچ) هستند. ضخامت نوری باید در نظر گرفته شود و در صورت لزوم حذف شود.
به طور کلی اکثر برنامه های CAD می توانند به طور خودکار ضخامت هدف را هنگام اندازه گیری سطوح مدل شده CAD حذف کنند. در بیشتر موارد دیگر، لازم است یک صفحه محلی در دسترس باشد تا جهتی را که در آن افست باید جبران شود، تعریف کند.
اندازه های هدف
اندازه هدف باید به اندازه کافی بزرگ باشد تا بتوان به طور دقیق اندازه گیری کرد. برای اندازه گیری دقیق، تصویر مورد نظر باید حداقل 3 پیکسل عرض و 3 پیکسل ارتفاع داشته باشد. اندازه هدف مناسب برای اندازه گیری به عوامل مختلفی بستگی دارد. اینها شامل فاصله دوربین تا جسم، وضوح دوربینی که استفاده میکنید، فاصله کانونی لنز و نوردهی هدف است. V-STARS برای اندازه گیری اهداف اندازه استاندارد مورد استفاده در سراسر صنعت در محدوده وسیعی بدون از دست دادن دقت طراحی شده است.
یک قانون ساده برای استفاده برای اندازه هدف این است که قطر هدف باید حداقل 1/1000 اندازه جسم (یا یک میلی متر در متر) باشد. به عنوان مثال، اگر اندازه جسم 3 متر (10 فوت) باشد، قطر هدف باید حداقل 3 میلی متر (1/8 اینچ) باشد.
اگر از یک شی به صورت مقطعی عکس می گیرید، حداقل قطر هدف باید 1/1000 برابر اندازه متوسط بخش هایی باشد که از آن عکس می گیرید.
اگرچه V-STARS می تواند اهدافی با این اندازه را به دقت اندازه گیری کند، توصیه می کنیم از اهدافی استفاده کنید که دو برابر حداقل اندازه هستند زیرا یافتن و اندازه گیری آنها آسان تر خواهد بود. قانون کلی توضیح داده شده در بالا سریع و آسان برای استفاده است و برای اکثر شرایط خوب است. نمودار زیر برای کمک به شما در تعیین اندازه هدف برای استفاده از دوربین INCA مفید است.
نمودار زیر برای کمک به شما در تعیین اندازه هدف برای استفاده از دوربین D1 مفید است. به دلیل فرمت کوچکتر D1، اهداف معمولاً باید حدود 50٪ بزرگتر باشند.
برای بهترین نتایج، همیشه از اهداف اندازه یکسان یا مشابه در یک اندازه گیری معین استفاده کنید. اندازه های هدف که تا اندازه 2 تا 1 متفاوت است، به طور کلی قابل قبول هستند.
انواع هدف
بسیاری از انواع مختلف اهداف بازتابی به عقب در دسترس هستند. این شامل:
چوب خود چسب انفرادی روی اهداف
این اهداف هم با ماسک و هم بدون ماسک در دسترس هستند. اهداف نقابدار ماسک سیاهی دارند که نقطه یکپارچهسازی با سیستمعامل را احاطه کرده است. این کنتراست را بهبود می بخشد و هدف را راحت تر می کند و به کار می گیرد. اهداف نقابدار همچنین میتوانند علامتهای هم ترازی را به لبهها اضافه کنند تا مرکز هدف دقیقاً با خطوط خطنویس تراز شود. در نمونه های دیگر آنها نقاط سیاه و سفید کوچکی در مرکز دارند تا تئودولیت ها بتوانند آنها را نیز اندازه گیری کنند. اهداف در اندازه های مختلف هستند.
نوار هدف
این یک رول پیوسته از نوار سیاه خود چسب با اهداف بازتابنده در فواصل منظم است. این ماده مخصوصاً برای اندازهگیری سطوح مفید است زیرا اعمال (و حذف) بسیار سریعتر از اهداف منفرد است. نوار با اندازه های هدف و فواصل مختلف در دسترس است. برخی از نمونه های معمولی در زیر نشان داده شده است.
اهداف ابزارسازی بدنه سخت
اینها حامل های هدف فلزی (معمولاً فولاد سخت شده) با شفت دقیق ساخته شده هستند. شفت هدف معمولاً در یک بوش دقیق قرار می گیرد. مواد بازتابنده بهطوری روی هدف قرار میگیرند که مرکز آن با مرکز شفت منطبق باشد (تا 12 میکرون یا 0.0005 اینچ) و مرکز هدف نیز مقدار دقیقی از پایه هدف جابجا شود (همچنین). در 12 میکرون یا 0.0005 اینچ). اهداف در اندازه های بسیار متنوعی هستند و در سه پیکربندی اصلی ساخته می شوند. آنها به صورت مستقیم روی اهداف، به عنوان اهداف 45 درجه و اهداف 90 درجه در دسترس هستند. اهداف 45 درجه و 90 درجه به ویژه مفید هستند زیرا وقتی در یک بوش دقیق نصب می شوند می توانند بدون از دست دادن دقت به سمت دوربین چرخانده شوند.
اهداف کروی با بدنه سخت نیز موجود است. این اهداف شبیه به اهداف ابزاری با بدنه سخت بالا هستند، اما هدف بازتابی به صورت کروی است، بنابراین هدف نیازی به چرخاندن ندارد. متأسفانه، این اهداف به اندازه اهداف ابزار سخت بدنه دقیق نیستند (دقیق آنها تا 100 میکرون یا 0.004 اینچ است) اما به ویژه به عنوان جایگزینی برای اهداف قابل چرخش در زمانی که هدف دشوار است مفید است.
اهداف کدگذاری شده
اهداف کدگذاری شده نوع خاصی از هدف هستند که نرم افزار V-STARS می تواند آن ها را شناسایی و به طور خودکار رمزگشایی کند. هر کد از یک الگوی منحصر به فرد مربع و یک نقطه مرکزی تشکیل شده است. در حال حاضر 132 هدف کدگذاری شده موجود است. اهداف کدگذاری شده در اندازه های نقطه 3 میلی متر، 6 میلی متر و 12 میلی متر هستند.
مدیریت و مراقبت هدف
اهداف انعکاسی به عقب بسیار سخت و بادوام هستند، اما باید به درستی از آنها مراقبت و نگهداری شود تا اطمینان حاصل شود که بالاترین دقت اندازه گیری به دست می آید.
دستورالعمل های نگهداری و مراقبت عبارتند از:
1. اهداف را قبل از استفاده از نظر هرگونه کثیفی، گرد و غبار یا آسیب به صورت چشمی بازرسی کنید. (می توانید از یک چراغ قوه قوی برای کمک به روشن شدن هدف و آسانتر کردن بازرسی بصری استفاده کنید). اگر هدف کثیف به نظر می رسد، می توانید آن را تمیز کنید (برای دستورالعمل های تمیز کردن به زیر مراجعه کنید). اگر آسیب دیده باشد (معمولاً در اثر تماس با جسم تیز یا ساینده)، نباید از آن استفاده کنید. هدف آسیب دیده ظاهر یکنواختی نخواهد داشت، اما به نظر می رسد که دارای حفره ها یا نواحی تاریک است که در آن هدف آسیب دیده است. اهداف آسیب دیده باید به عنوان بد علامت گذاری شوند تا از استفاده تصادفی جلوگیری شود. قرار دادن یک خط از طریق هدف با یک نشانگر قرمز یکی از راه های علامت دادن به یک هدف است که بد است.
2. از دست زدن به مواد بازتابنده خودداری کنید زیرا روغن طبیعی و کثیفی دست شما می تواند به اثر بازتابی آسیب برساند و هدف را تیره و غیر قابل اندازه گیری کند.
3. شما باید اهداف را در یک منطقه تمیز و خشک نگهداری کنید (بهتر است داخل یک ظرف در بسته نگهداری شود).
4. شما نمی توانید از اهداف بازتابی پس از خیس بودن استفاده کنید زیرا آب ضریب شکست را تغییر می دهد و اثر بازتابی را از بین می برد. اهداف را با مالش یا کشیدن به آرامی با یک پارچه یا دستمال خشک کنید و اجازه دهید خشک شوند.
5. برای از بین بردن کثیفی ها و آلودگی ها از روی هدف از چسب نواری استفاده کنید. اگر این کار موثر نبود، اهداف را با الکل مالشی یا الکل دناتوره شده با مالش ملایم مواد بازتابنده با یک پارچه یا دستمال مرطوب شده با الکل تمیز کنید. قبل از استفاده حتما بگذارید هدف کاملا خشک شود.
از استون یا حلال های مشابه استفاده نکنید زیرا ممکن است هدف برای همیشه آسیب ببیند.
در حال پیوست کردن نوار خودکار
اگر از آن استفاده می شود، نوار خودکار باید روی یا نزدیک جسم قرار داده شود تا در طول اندازه گیری نسبت به جسم حرکت نکند. به یاد داشته باشید، هر نوع اندازه گیری نیازی به استفاده از نوار خودکار ندارد، اما آنها اکثر اندازه گیری ها را سریع تر و آسان تر می کنند. اگر جسم مغناطیسی است، می توانید از پایه مغناطیسی ارائه شده با سیستم برای اتصال ایمن AutoBar به جسم استفاده کنید. در غیر این صورت، می توانید از تفنگ چسب ارائه شده به همراه سیستم برای چسباندن AutoBar به جسم استفاده کنید. در صورت امکان، AutoBar باید طوری قرار داده شود که به راحتی دیده شود و توسط شی مسدود نشود. معمولاً قرار دادن AutoBar در جایی در وسط شی بهتر است اما ضروری نیست. علاوه بر این، نوار خودکار نباید سایر نقاط هدف را مسدود کند.
اگر نوار خودکار در طول اندازهگیری جابهجا شود، معمولاً همچنان میتوانید اندازهگیری را ادامه دهید، اما دیگر نمیتوانید از نوار خودکار استفاده کنید.
اندازه استاندارد AutoBar ارائه شده به همراه سیستم می تواند در بردی تا 10 متر (33 فوت) استفاده شود. برای فواصل بزرگتر می توان از AutoBar بزرگتر استفاده کرد. برخی از اندازه های بزرگتر از GSI در دسترس هستند
اگر میخواهید از نوار خودکار برای اندازهگیری مجدد استفاده کنید، باید آن را در همان مکانی که برای اندازهگیری اولیه در آن بود، قرار دهید. اگر AutoBar حذف نشده باشد، معمولاً مشکلی نیست. اگر AutoBar حذف شده باشد، معمولاً باید نوعی وسیله را طراحی کنید که به شما امکان می دهد AutoBar را به محل اصلی خود بازگردانید.
چسباندن نوار(های) مقیاس
نوار(های) مقیاس اطلاعات دقیق فاصله را ارائه می دهد تا بتوان اندازه گیری را به درستی مقیاس بندی کرد. با این حال، لازم نیست هر اندازه گیری از نوار(های) مقیاس استفاده کند. به عنوان مثال، اطلاعات مقیاس ممکن است با استفاده از فواصل شناخته شده بین برخی از نقاط ثابت روی جسم در دسترس باشد. یا، ماهیت برنامه ممکن است نیازی به اندازه گیری های مقیاس بندی نداشته باشد. اگر نوار خودکار وجود داشته باشد، زمانی که فقط به مقیاس اسمی نیاز است، می توان از آن به عنوان نوار مقیاس استفاده کرد. (AutoBar برای استفاده به عنوان مرجع مقیاس دقیق بسیار کوچک است).
استفاده از نوار(های) مقیاس در اندازه گیری بسیار شبیه به استفاده از نوار خودکار است. شما باید نوار(های) مقیاس را روی یا نزدیک جسم بچسبانید تا در طول اندازه گیری نسبت به جسم حرکت نکنند. نقاط نوار مقیاس مانند هر نقطه دیگر هستند. آنها فقط باید از دو مکان مختلف دیده شوند (و ممکن است هر دو انتهای نوار مقیاس را در هر عکس نبینند). با این حال، از آنجایی که این نقاط برای مقیاس اندازه گیری استفاده می شوند، باید سعی کنید تا آنجا که ممکن است آنها را از مکان های بیشتری ببینید. همچنین سعی کنید میله های مقیاس را طوری قرار دهید که دیگر اهداف را مسدود نکنند. برای بهترین نتایج، اهداف نوار مقیاس باید حداقل به اندازه سایر اهداف بزرگ باشند. برای اندازه هدف صحیح به اندازه های هدف مراجعه کنید. همچنین، برای جزئیات بیشتر در مورد استفاده از نوار(های) مقیاس، به سؤالات پیوست A در مورد مقیاس مراجعه کنید. همچنین به مقیاس گذاری فتوگرامتری مراجعه کنید.
خلاصه و چک لیست هدف گذاری
چک لیست هدف گذاری
چک لیست زیر را برای کمک به هدف گذاری آماده کرده ایم. اکیداً توصیه می کنیم از آن در هر پروژه ای استفاده کنید تا زمانی که آن را به خاطر بسپارید. شما حتی باید به آن اضافه کنید یا آن را مطابق با نیاز خود تغییر دهید.
زوایای هدف را بررسی کنید (بیش از 60 درجه خارج از محور)
از دست زدن به مواد بازتابنده خودداری کنید.
قبل از استفاده، اهداف را بررسی
کنید – مطمئن شوید که اهداف تمیز و سالم هستند.
– در صورت لزوم به آرامی با الکل تمیز کنید.
هنگام خیس بودن از اهداف استفاده نکنید.
اندازه هدف مناسب را انتخاب کنید (پیشنهاد 1/500 اندازه شی).
نوار خودکار
– نوار استاندارد برای محدوده های کمتر از 10 متر مناسب است.
– محکم به شی بچسبانید.
– در مکان بسیار قابل مشاهده قرار دهید.
نوار (های) مقیاس
– به طور صلب به شی وصل کنید.
– در مکان بسیار قابل مشاهده قرار دهید.
گروه علمی تحقیقاتی چشم انداز در سال ۱۳۸۱ کار خود را آغاز نموده است . هرچند که یک واحد نوپا و جدید می باشد ولی باخود تجربه ۳۰ الی ۴۰ ساله دارد چرا که تمامی اعضای این واحد مدرس دانشگاه بوده و با خود تجربه چندین ساله را به یدک می کشند.
دسترسی سریع
اطلاعات
دفترمركزى : تهران -ميدان وليعصر، بلوار كريمخان زند، ساختمان ۳۱۴، يلاك ٣١٠، طبقه ٥، واحد ١٠ ، كديستى: ١٥٩٣٨٥٣٢٣٧
شیراز- بلوار شهید بهشتی -حدفاصل چهارراه بنفشه و خلدبرین کوچه ۵ پلاک ۲۳۴
لطفا اطلاعات خود را به شکل کامل درون فرم وارد کنید و سپس دکمه عضویت در خبرنامه را بزنید.
خبرنامه
لطفا اطلاعات خود را به شکل کامل درون فرم وارد کنید و سپس دکمه عضویت در خبرنامه را بزنید.
درباره سرزمین فناوری مکانی GISLAND
گروه علمی تحقیقاتی چشم انداز در سال ۱۳۸۱ کار خود را آغاز نموده است . هرچند که یک واحد نوپا و جدید می باشد ولی باخود تجربه ۳۰ الی ۴۰ ساله دارد چرا که تمامی اعضای این واحد مدرس دانشگاه بوده و با خود تجربه چندین ساله را به یدک می کشند.





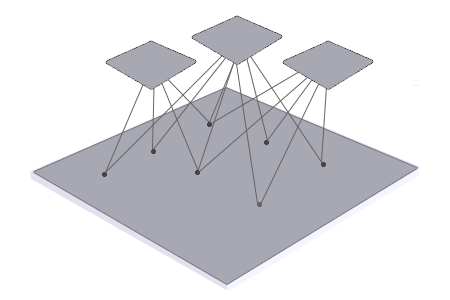
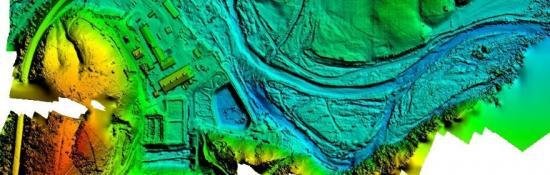

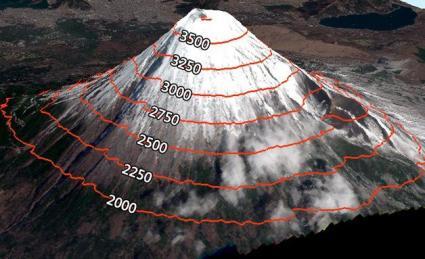



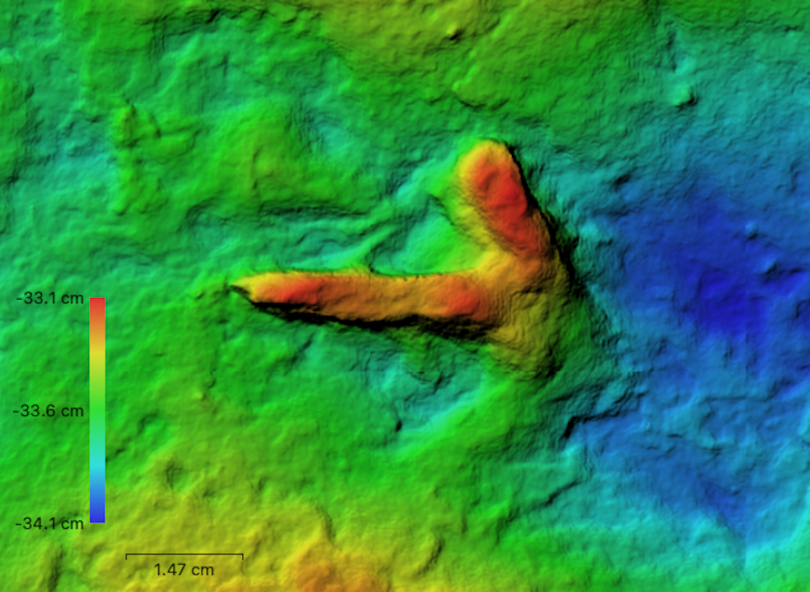


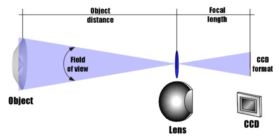
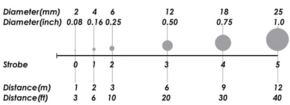





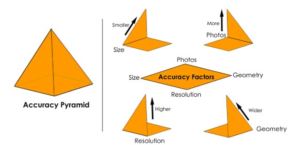
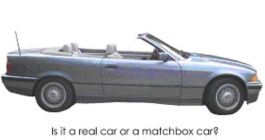


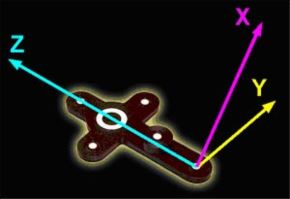
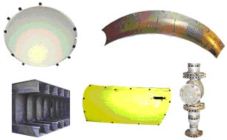
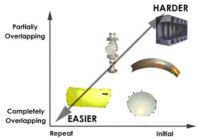

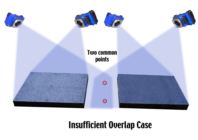
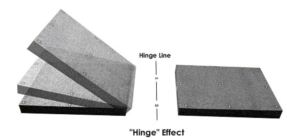

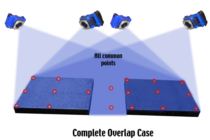
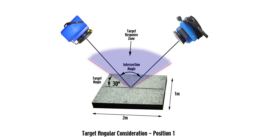
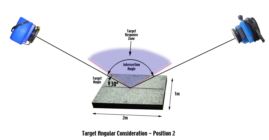
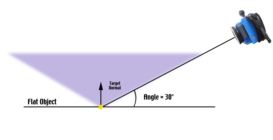
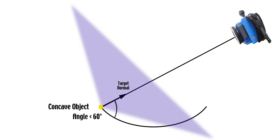
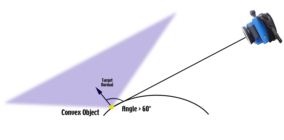
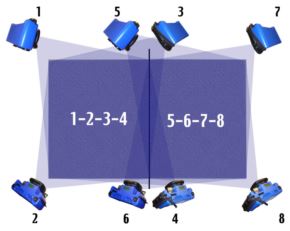
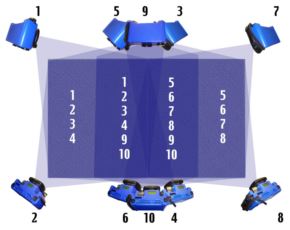
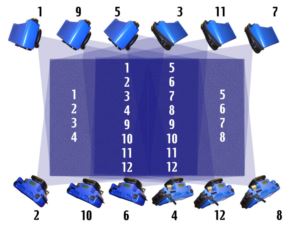
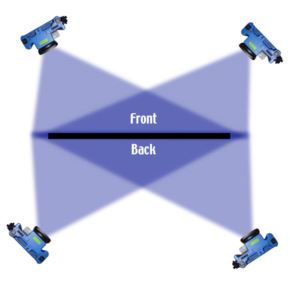
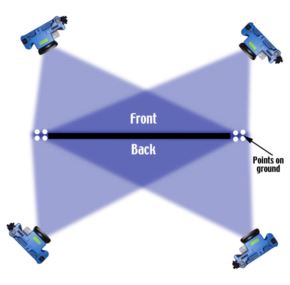


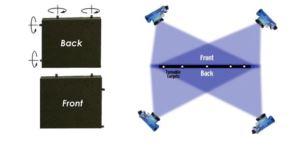
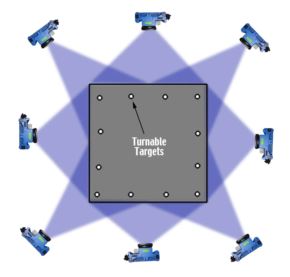
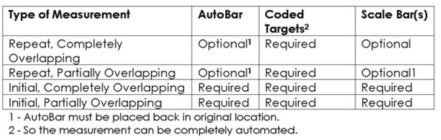
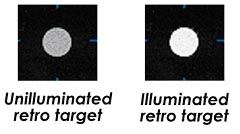
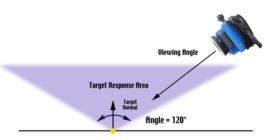
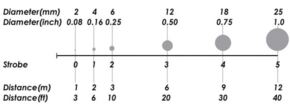
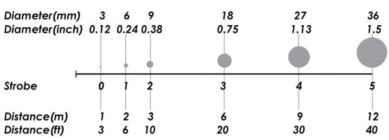



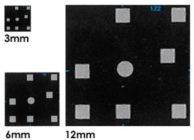





9 نظرات