

خلاصه
کلید واژه ها:
مدل سطح دیجیتال ; طرح اقتصادی جنگل ; تجزیه و تحلیل قابلیت عبور ; داده های سنجش از دور
1. معرفی
-
درجات خاص CCM؛
-
نوع شناسی عملی بودن زمین توسط نوع وسایل نقلیه نظامی.
-
عوامل و ویژگی های جغرافیایی با تأثیر قابل توجه بر CCM.
-
سایر عوامل (فنی، پرسنلی، محیطی و غیره).
-
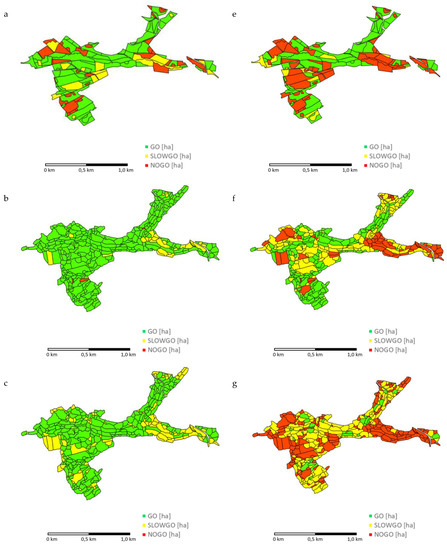
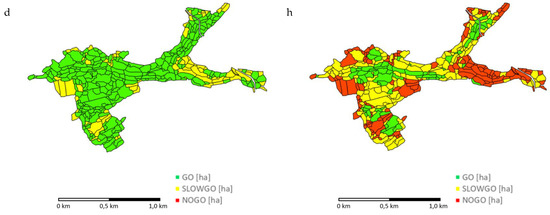
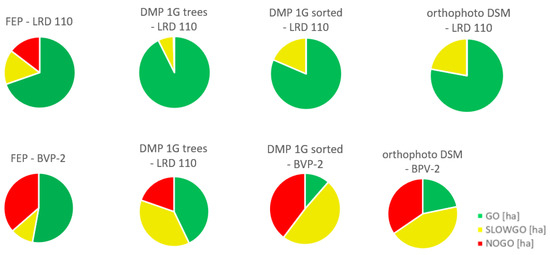
زمین قابل عبور (GO)؛
-
زمین قابل عبور با محدودیت (Slow GO)؛
-
زمین صعب العبور (NO GO).
2. روش بررسی
3. تجزیه و تحلیل روش و داده ها
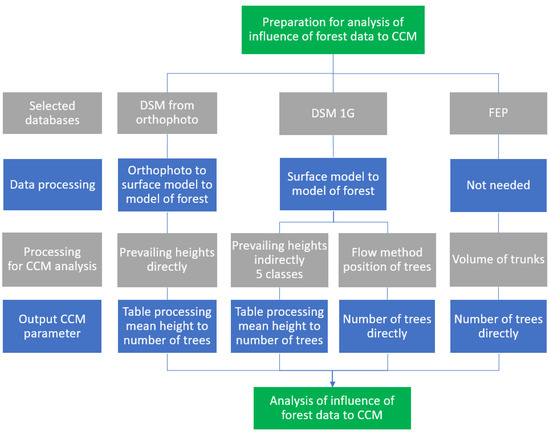
3.1. بانک اطلاعات طرح اقتصادی جنگل
اطلاعات از پایگاه داده FEP با روش حجم ترانک پردازش شد. این روش در هیچ نشریه شناخته شده ای توضیح داده نشده است. در نتیجه ویژگی های درختی موجود در پایگاه داده ایجاد شد. این روش از پارامترهای تنه استفاده می کند. هر چند ضلعی در FEP حاوی اطلاعاتی در مورد حجم کل تنه هر نوع درخت و حجم تنه یک درخت از هر نوع است. سپس تعدادی درخت در هکتار با فرمول (1) [ 8 ] محاسبه میشود:
که در آن NTH تعداد درختان در هکتار است، TVT حجم کل درختان در متر مکعب در یک منطقه جنگلی، VST حجم متوسط یک درخت در متر مکعب و AR مساحت یک جنگل در هکتار است. یک فاصله متوسط درخت حاصل با فرمول (2) محاسبه می شود. ربانسکی، 2009 [ 10 ] را ببینید:
که در آن MTS یک فاصله متوسط درختان است، π ثابت است، و NTH تعداد درختان در هکتار است.
3.2. داده ها بر اساس سطح دیجیتال مدل 1 نسل
- (1)
-
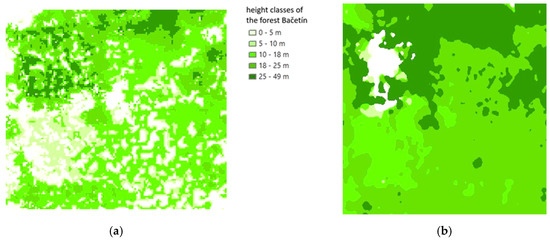
Reclassify – داده های شطرنجی ارتفاعات جنگل را به 5 کلاس طبقه بندی می کند.
- (2)
-
آمار منطقه ای – اکثریت – اکثریت یک کلاس را در مناطق داخلی جنگل محاسبه می کند.
- (3)
-
کمتر از و تهی تنظیم کنید—پیکسل های ارتفاع کمتر (از اکثریت محاسبه شده) جنگل در هر منطقه را پاک می کند.
- (4)
-
آمار منطقه ای-میانگین – ارتفاع متوسط را در هر ناحیه از پیکسل های باقی مانده محاسبه می کند.
با روش دوم پردازش DSM 1G، ابزارهای Arc Toolbox Flow Length و Flow Direction برای محاسبه نواحی بالای درختان استفاده شدند [ 42 ]. شکل 2 را ببینید . سپس هر چند ضلعی که یک درخت را نشان می داد به یک نقطه تبدیل شد. در نهایت، MTS به طور مستقیم با فرمول (3) محاسبه شد:
که در آن MTS فاصله متوسط درختان است، NTH تعداد درختان در هکتار و AR مساحتی از یک جنگل در هکتار است.
3.3. مدل سطح دیجیتال ایجاد شده از Orthophoto
3.4. ارزیابی قابلیت قبولی
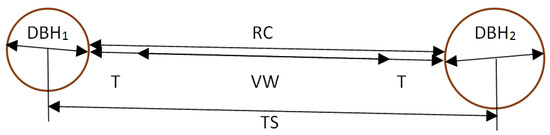
برای یافتن مسیر بهینه از میان جنگل باید بدانید: پارامترهای یک وسیله نقلیه، پارامترهای درختان، نقطه شروع و پایان یک مسیر و مناطق صعب العبور. مهمترین پارامترهای یک وسیله نقلیه عرض خودرو ( VW )، طول، شعاع گردش و تحمل ( T ) است [ 10 ]. T حداقل فاصله یک وسیله نقلیه از تنه برای عبور ایمن از بین دو درخت را تعیین می کند. برای سادهسازی مدل عبورپذیری، T همچنین جایگزین اثر سایر پارامترهای خودرو (طول، شعاع گردش و غیره) میشود. به نوبه خود، پارامترهای درخت به آن دسته از ویژگی هایی اشاره دارد که برای یافتن مسیر بهینه در یک جنگل کلیدی هستند. در این مورد، آن پارامترها مختصات شبیه سازی شده ساقه، فاصله درختی متوسط (MTS )، میانگین قطر در ارتفاع سینه ( MDBH )، میانگین راهرو سواری ( MRC )، و عرض خودرو VW – همه پارامترها بر حسب (m). یک رابطه بین MTS ، MDBH و MRC را می توان با استفاده از فرمول (4) بیان کرد و در شکل 3 نشان داده شده است [ 10 ].
محاسبه قابلیت عبور با MRC و VW را می توان با فرمول (5) [ 10 ] بیان کرد:
-
اگر T < 0، پس قابلیت عبور = NO GO;
-
اگر T = ⟨0، 1⟩، پس قابلیت عبور = SLOW GO.
-
اگر T > 1، پس قابلیت عبور = GO.
4. نتایج و بحث
4.1. ارزیابی مرزها در جنگل ها
4.2. ارزیابی پایگاه های داده و روش های پردازش
4.2.1. پایگاه داده FEP
4.2.2. DSM 1G
4.2.3. DSM ایجاد شده از Orthophoto
4.2.4. مقایسه پایگاه های داده
4.3. کیفیت داده ها از تحلیل های CCM ارزیابی شده است
-
DSM 1G به 5 کلاس طبقه بندی شده است.
-
DMS 1G با تجزیه و تحلیل جریان به موقعیت درختان پردازش شده است.
-
پایگاه داده FEP
-
پایگاه داده FEP دارای پوشش کمی از داده ها در جمهوری چک است و کمتر از 20٪ از جنگل ها را شامل می شود. در حال حاضر، مجموعه داده در سطح جهانی قابل استفاده نیست زیرا برخی از مناطق هیچ اطلاعاتی در مورد جنگلها ندارند. پس از اینکه دادهها اکثر قلمرو چک را پوشش میدهد، میتواند CCM و سایر تحلیلهای مرتبط با ارزیابی جنگل را ارائه دهد.
-
به روز رسانی منظم ویژگی های جنگل ها در پایگاه داده FEP باید ایمن شود تا از دقت بالاتری اطلاعات اطمینان حاصل شود.
-
DSM 1G در حال منسوخ شدن است. دادههای صادر شده از DSM 1G باید به درستی پردازش شوند تا از ارتفاع درختان بهروز شده در قالب اصلاح مقادیر واقعی اطمینان حاصل شود.
-
یک روش مناسب بخش مهمی از پردازش DSM 1G است که در بیشتر موارد، تبدیل از ارتفاع درختان به تعداد درختان در هکتار است. روش های جدیدی برای استفاده از جداول رشد جنگل ها به منظور پردازش DSM باید ایجاد شود.
-
DSM ایجاد شده از orthophoto دقیق و به روز است، با این حال پردازش پیچیده و طولانی آن قابلیت استفاده گسترده تر را محدود می کند. فرآیند جمعآوری، پردازش و ارزیابی دادهها باید خودکار باشد. در غیر این صورت، زمان و ظرفیت مصرف بیش از حد گسترده است.
5. نتیجه گیری ها
منابع
- هانسن، ام سی; پوتاپوف، PV؛ مور، آر. هنچر، م. توروبانوا، SA; تیوکاوینا، آ. تاو، دی. Stehman، SV; گوتز، اس جی. لاولند، TR; و همکاران نقشه های جهانی با وضوح بالا از تغییر پوشش جنگلی قرن بیست و یکم. Science 2013 ، 342 ، 850-853. [ Google Scholar ] [ CrossRef ] [ PubMed ][ نسخه سبز ]
- Ahlvin، RB; هیلی، مدل تحرک مرجع ناتو PW ، ویرایش دوم. راهنمای کاربر NRMM II. TR GL-92-190; ایستگاه آزمایشی مهندسی ارتش ایالات متحده: Vicksburg، MS، ایالات متحده آمریکا، 1992. [ Google Scholar ]
- Cibulova، K. تحرک در شرایط بحرانی. مهندس کلید ماتر 2017 ، 755 ، 236-241. [ Google Scholar ] [ CrossRef ]
- دونال، اف. هوباچک، م. استورکووا، ام. بورش، م. Šimková، K. شناسایی اشکال ریز نقش برجسته در امتداد اجسام خط بر روی داده های DEM و ارزیابی تأثیر آنها بر حرکت خودرو. در مجموعه مقالات کنفرانس بین المللی فناوری های نظامی 2017 (ICMT)، برنو، جمهوری چک، 31 مه تا 2 ژوئن 2017؛ صص 262-267. [ Google Scholar ]
- Hošková-Mayerová، Š. تالهوفر، وی. هافمن، ا. Kubíček، P. کیفیت پایگاه داده فضایی و منابع عدم قطعیت بالقوه. در مدلسازی پویا پیشرفته سیستم های اقتصادی و اجتماعی، مطالعات هوش محاسباتی ; Springer: برلین/هایدلبرگ، آلمان، 2013; جلد 448، ص 127–142. [ Google Scholar ] [ CrossRef ]
- هوباچک، م. کوواریک، وی. تالهوفر، وی. ریبانسکی، م. هافمن، ا. Břeňová، M. Čeplová, L. مدل سازی اثرات جغرافیایی و هواشناسی بر حرکت وسیله نقلیه در زمین باز. در منطقه اروپای مرکزی از نظر جغرافیای کنونی ; Masarykova univerzita: برنو، جمهوری چک، 2016; صص 149-159. [ Google Scholar ]
- Pokonieczny، K. سیستم تولید نقشه قابلیت عبور خودکار نظامی. در مجموعه مقالات کنفرانس بین المللی فناوری های نظامی 2017 (ICMT)، برنو، جمهوری چک، 31 مه تا 2 ژوئن 2017؛ صص 285-292. [ Google Scholar ]
- Rybanský, M. مدلسازی تأثیر عوامل جغرافیایی بر جنبش بین کشوری (به زبان چک). پایان نامه هابیلیتیشن، VA برنو، برنو، جمهوری چک، 2002; پ. 477. [ Google Scholar ]
- Rybanský, M. تأثیر عوامل جغرافیایی بر حرکت متقابل کشور در طول عملیات نظامی و بلایای طبیعی. در کنفرانس بین المللی فن آوری های نظامی 2007 ; دانشگاه دفاع: برنو، جمهوری چک، 2007; صص 590-596. شابک 978-80-7231-238-2. [ Google Scholar ]
- Rybanský, M. جنبش بین کشورها- تأثیر و ارزیابی عوامل جغرافیایی ; CERM: برنو، جمهوری چک، 2009; پ. 113. شابک 978-80-7204-661-4. [ Google Scholar ]
- Rybanský, M. مدلسازی مسیر بهینه وسیله نقلیه در زمین در شرایط اضطراری با استفاده از داده های GIS. در هشتمین سمپوزیوم بین المللی زمین دیجیتال (ISDE8) 2013 ; IOP Conf. سلسله؛ Earth Environmental Science 18 012071: Kuching, Malaysia, 2014. [ Google Scholar ] [ CrossRef ][ Green Version ]
- Shoop, SA; ریچموند، PW; Lacombe, J. مروری بر مدلسازی تحرک مناطق سرد در CRREL. J. Terramechanics 2016 ، 43 ، 1-26. [ Google Scholar ] [ CrossRef ]
- STANAG 3992-AGEoP-1 Terain Analyses, Field Manual No. 5-33 ; ستاد فرماندهی ارتش: واشنگتن، دی سی، ایالات متحده آمریکا، 1990.
- استودولا، پ. Mazal, J. موقعیت بهینه و حرکت وسایل نقلیه زمینی بدون سرنشین خودمختار. WSEAS Trans. فرآیند سیگنال 2010 ، 6 ، 68-77. [ Google Scholar ]
- طاهری، س. ساندو، سی. طاهری، EP; پینتو، ای. گوریش، دی. یک بررسی فنی بر روی مدلهای مکانیک زمینی برای تعامل بین تایر و زمین مورد استفاده در مدلسازی و شبیهسازی وسایل نقلیه چرخدار. J. Terramechanics 2015 ، 57 ، 1-22. [ Google Scholar ] [ CrossRef ]
- Hyyppä، J.; Hyyppä، H.; لیتکی، پی. یو، ایکس. هاگرن، اچ. رونهولم، پی. پیسالو، یو. پیتکنن، جی. مالتامو، ام. الگوریتم ها و روش های اسکن لیزری در هوا برای اندازه گیری جنگل. بین المللی قوس. فتوگرام Remote Sens. 2004 , 36 , 82-89. [ Google Scholar ]
- بلر، جی. رابین، دی ال. هافتون، MA سنسور تصویربرداری گیاهی لیزری: یک ارتفاع سنج لیزری هوابرد در ارتفاع متوسط، فقط دیجیتالی برای نقشه برداری از پوشش گیاهی و توپوگرافی. ISPRS J. Photogramm. Remote Sens. 1999 , 54 , 115-122. [ Google Scholar ] [ CrossRef ]
- لیم، ک. تریتز، پی. ولدر، ام. سنت اونگه، بی. سیل، M. LiDAR سنجش از دور ساختار جنگل. Prog. فیزیک Geogr. محیط زمین. 2003 ، 27 ، 88-106. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- هیوریچ، ام. پرسون، ا. هولمگرن، جی. Kennel, E. تشخیص و اندازهگیری درختان منفرد با اسکن لیزری در جنگلهای کوهستانی مرکب اروپای مرکزی با استفاده از الگوریتمی که برای شرایط جنگلهای شمالی سوئد توسعه یافته است. بین المللی قوس. فتوگرام حسگر از راه دور اسپات. Inf. علمی 2004 ، 36 (Pt 8) ، W2. [ Google Scholar ]
- آشوف، تی. الگوریتم های اسپیکر، اچ. برای تشخیص خودکار درختان در داده های اسکنر لیزری. بین المللی قوس. فتوگرام Remote Sens. 2004 ، 36 ، 71-75. [ Google Scholar ]
- گوباکن، تی. Næsset، E. اثرات رشد جنگل بر معیارهای تاج پوشش لیزری. بین المللی قوس. فتوگرام Remote Sens. 2004 , 36 , 224-227. [ Google Scholar ]
- کارسون، WW; اندرسن، HE; Reutebuch، SE; McGaughey، RJ Lidar برنامه های کاربردی در جنگلداری – یک مرور کلی. در مجموعه مقالات کنفرانس سالانه ASPRS، دنور، CO، ایالات متحده آمریکا، 23-28 مه 2004. [ Google Scholar ]
- اهلبرگ، اس. سودرمن، یو. تولت، جی. مدلهای محیطی با وضوح بالا از دادههای حسگر 2006. در مجموعه مقالات بهرهبرداری از تصاویر دفاعی 2006، لندن، بریتانیا، 17 تا 18 اکتبر 2006. [ Google Scholar ]
- Vauhkonen، J. برآورد ویژگی های تک درختی با اسکن لیزری هوابرد: روش های مبتنی بر هندسه محاسباتی داده های نقطه سه بعدی. Ph.D. پایان نامه، انجمن فنلاند علوم جنگل، دانشگاه هلسینکی، هلسینکی، فنلاند، 2010. [ Google Scholar ]
- میکیتا، تی. کلیمانک، ام. Cibulka، M. ارزیابی دادههای اسکن لیزری هوا برای پارامترهای درخت و مدلسازی زمین در محیط جنگل. در Acta Universitatis Agriculturae et Silviculturae Mendelianae Brunensis ; انتشارات دانشگاه مندل: برنو، جمهوری چک، 2013; ص 1339–1347. [ Google Scholar ]
- ریبانسکی، ام. Břeňová، M. Čermák، J. ون جندرن، جی. Sivertun، A. تعیین ساختار پوشش گیاهی با استفاده از داده های LIDAR و پارامترهای رشد جنگل. در هشتمین کنفرانس و نمایشگاه بین المللی IGRSM در زمینه سنجش از دور و مکانی، IGRSM 2016. کوالالامپور، مالزی: IOP PUBLISHING LTD، DIRAC HOUSE، TEMPLE BACK، BRISTOL BS1 6BE، ENGLAND ; انتشارات IOP: بریستول، بریتانیا، 2016. [ Google Scholar ]
- سو، ی. گوا، کیو. سرخ کردن، DL; کالینز، بی.ام. کلی، م. فلانگان، جی پی؛ نبردها، JJ یک استراتژی نقشه برداری گیاهی برای جنگل های مخروطی با ترکیب داده های هوابرد LiDAR و تصاویر هوایی. می توان. J. Remote Sens. 2015 ، 42 ، 1-15. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مارتون، ام. ریزولی، پی. وکلیچ، سی. گونزالس، سی. Bueso-Bello, J.-L.; والدو، پی. شولزه، دی. زینک، م. کریگر، جی. Moreira, A. نقشه جهانی جنگل/غیر جنگلی از داده های تداخل سنجی SAR TanDEM-X. سنسور از راه دور محیط. 2018 ، 205 ، 352-373. [ Google Scholar ] [ CrossRef ]
- کوگلر، اف. شولزه، دی. هاجنسک، آی. پرتزش، اچ. پاپاتاناسیو، KP TanDEM-X Pol-InSAR عملکرد برای تخمین ارتفاع جنگل. IEEE Trans. Geosci. Remote Sens. 2014 , 52 , 6404–6422. [ Google Scholar ] [ CrossRef ]
- کازکارا-بس، وی. تلو آلونسو، ام. فیشر، آر. هیم، م. پاپاتاناسیو، KP پایش دینامیک ساختار جنگل با استفاده از توموگرافی L-Band SAR. Remote Sens. 2017 , 9 , 1229. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- گیتاس، IZ; پلی کروناکی، ا. کاتگیس، تی. مالینیس، جی. مشارکت سنجش از دور در فعالیتهای مدیریت بلایا: مطالعه موردی آتشسوزیهای بزرگ در پلوپونز، یونان. بین المللی J. Remote Sens. 2008 ، 29 ، 1847-1853. [ Google Scholar ] [ CrossRef ]
- پلتفرمهای سنجش از راه دور Ambrosia، VG UAS برای مدیریت و پاسخگویی اضطراری. منطقه کالیفرنیای شمالی—انجمن فتوگرامتری و سنجش از دور آمریکا (ASPRS)، جلسه فنی: سنجش از دور آتش و تأثیرات اکوسیستم ؛ ASPRS: ساکرامنتو، کالیفرنیا، ایالات متحده آمریکا، 2012. [ Google Scholar ]
- آمبروزیا، وی. Zajkowski، T. انتخاب UAS/حسگرهای کلاس مناسب برای پشتیبانی از نظارت بر آتش، تجربیات واقعی در ایالات متحده، کتابچه راهنمای وسایل نقلیه هوایی بدون سرنشین . Valavanis, KP, Vachtsevanos, GJ, Eds. Springer: نیویورک، نیویورک، ایالات متحده آمریکا، 2014; شابک 978-9048197064. [ Google Scholar ]
- سیمون، جی. کاداوی، جی. Macků, J. Forest Management (به زبان چک) ; اسکریپت؛ دانشگاه مندل در برنو: برنو، جمهوری چک، 1998. [ Google Scholar ]
- والا، م. Rybanský, M. تأثیر امداد بر جنبش بین کشوری توسط وسایل نقلیه نظامی منتخب ; VA Brno: برنو، جمهوری چک، 2001; پ. 84. [ Google Scholar ]
- تنظیم اقتصادی جنگل. موسسه مدیریت جنگل Brandýs and Labem. در دسترس آنلاین: https://geoportal.uhul.cz/mapy/mapylho.html (در 24 ژوئن 2020 قابل دسترسی است).
- مدل دیجیتالی ارتفاع جمهوری چک از نسل پنجم (DMR5G) ČÚZK. موجود به صورت آنلاین: https://geoportal.cuzk.cz/(S(xg531xtrv3wnozbfp2hdiitu))/Default.aspx?mode=TextMeta&side=vyskopis&metadataID=CZ-CUZKDMR5GV&head_tab=sekce02-gp02 (اگوست 8/8).
- مدل سطح دیجیتال جمهوری چک از نسل اول (DMP1G) ČÚZK. در دسترس آنلاین: https://geoportal.cuzk.cz/(S(xg531xtrv3wnozbfp2hdiitu))/ (در 8 اوت 2020 قابل دسترسی است).
- طرح اقتصادی جنگل. ÚHÚL. در دسترس آنلاین: https://geoportal.uhul.cz/mapy/mapylho.html (در 16 سپتامبر 2020 قابل دسترسی است).
- پلرایت، ا. تورتینی، آر. Coops, N. تعیین طول ویدیوی بهینه برای تخمین ارتفاع ساختمان از طریق اندازه گیری جابجایی شعاعی از فضا. ISPRS Int. J. Geo-Inf. 2018 ، 7 ، 380. [ Google Scholar ] [ CrossRef ] [ نسخه سبز ]
- اجزای پلانیمتری/ZABAGED ® -پایه بنیادی داده های جغرافیایی. ČUZK. در دسترس آنلاین: https://geoportal.cuzk.cz/(S(xg531xtrv3wnozbfp2hdiitu))/Default.aspx?mode=TextMeta&text=dSady_zabaged&side=zabaged&menu=24 (در 8 20 اوت در دسترس قرار گرفت).
- Čeplová، L. مدلسازی تأثیر زمین و پوشش گیاهی بر حرکت وسایل نقلیه نظامی. Ph.D. پایان نامه، دانشگاه دفاع برنو، برنو، جمهوری چک، 2017. [ Google Scholar ]
- DJI. DJI Phantom 3 Advanced، راهنمای شروع سریع [آنلاین]. نوآوری های داجیانگ در دسترس آنلاین: https://dl.djicdn.com/downloads/phantom_3/en/Phantom_3_Advanced_Quick_Start_Guide_V1.2.pdf (در 18 اوت 2020 قابل دسترسی است).
- Cibulka، M. دقت مدلهای ارتفاعی دیجیتال به دست آمده از دادههای اسکن لیزری هوایی در تودههای جنگلی (به زبان چک) برنو. پایان نامه، دانشگاه مندل در برنو، برنو، جمهوری چک، 2011. [ Google Scholar ]
- چرنی، م. پارز، جی. Malík, Z. جداول رشد و مالیات گونه های اصلی درخت در جمهوری چک (صنوبر، کاج، راش)—به زبان چک ; IFER – موسسه تحقیقات اکوسیستم های جنگلی: Jílové u Prahy، جمهوری چک، 1996; پ. 245. [ Google Scholar ]
- چپلوا، ال. Břeňová، M. هوباچک، م. زرزان، پ. Mikita، T. تجزیه و تحلیل احتمالات حرکت وسایل نقلیه در زمین تحت پوشش پوشش گیاهی. در کنفرانس بین المللی فناوری های نظامی ICMT2015 در سال 2015 ؛ دانشگاه دفاع، دانشکده فناوری نظامی: برنو، جمهوری چک، 2015; ص 301-305. شابک 978-80-7231-976-3. [ Google Scholar ]
- Goodbody، TRH; کوپس، ن. مارشال، پی. تومپالسکی، پ. Crawford, P. سیستم های هوایی بدون سرنشین برای اهداف فهرست دقیق جنگل: بررسی و مطالعه موردی. برای. کرون 2017 ، 93 ، 71-81. [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- مولورهیل، سی. Coops، NC; تومپالسکی، پ. باتر، CW; دیک، AR کاربرد فتوگرامتری زمینی برای ارزیابی حجم درخت و مخروط در جنگلهای مرکب جنگلی شمالی. ان برای. علمی 2019 , 76 . [ Google Scholar ] [ CrossRef ][ نسخه سبز ]
- فناوری Point Cloud. در دسترس آنلاین: https://demo.pointcloudtechnology.com/TreeDetection/ (در 19 اکتبر 2020 قابل دسترسی است).



بدون دیدگاه